JP2016036902A - 駆動モジュール、駆動モジュールを含む運動補助装置及び運動補助装置の制御方法 - Google Patents
駆動モジュール、駆動モジュールを含む運動補助装置及び運動補助装置の制御方法 Download PDFInfo
- Publication number
- JP2016036902A JP2016036902A JP2015090586A JP2015090586A JP2016036902A JP 2016036902 A JP2016036902 A JP 2016036902A JP 2015090586 A JP2015090586 A JP 2015090586A JP 2015090586 A JP2015090586 A JP 2015090586A JP 2016036902 A JP2016036902 A JP 2016036902A
- Authority
- JP
- Japan
- Prior art keywords
- stopper
- gear
- ring gear
- rotating body
- carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 14
- 230000033001 locomotion Effects 0.000 title abstract description 56
- 230000005540 biological transmission Effects 0.000 claims abstract description 97
- 230000009467 reduction Effects 0.000 claims description 148
- 239000003638 chemical reducing agent Substances 0.000 claims description 115
- 239000002131 composite material Substances 0.000 claims description 28
- 230000002093 peripheral effect Effects 0.000 claims description 14
- 230000000903 blocking effect Effects 0.000 claims description 5
- 238000010586 diagram Methods 0.000 description 44
- 239000000969 carrier Substances 0.000 description 18
- 210000002683 foot Anatomy 0.000 description 14
- 230000004048 modification Effects 0.000 description 12
- 238000012986 modification Methods 0.000 description 12
- 210000000689 upper leg Anatomy 0.000 description 10
- 230000000712 assembly Effects 0.000 description 5
- 238000000429 assembly Methods 0.000 description 5
- 244000309466 calf Species 0.000 description 5
- 210000004394 hip joint Anatomy 0.000 description 5
- 238000005096 rolling process Methods 0.000 description 5
- 239000000470 constituent Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 210000002414 leg Anatomy 0.000 description 3
- 210000004197 pelvis Anatomy 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 210000001624 hip Anatomy 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 210000003205 muscle Anatomy 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000007480 spreading Effects 0.000 description 2
- 238000003892 spreading Methods 0.000 description 2
- 0 *CC(C*)[N+]([O-])=O Chemical compound *CC(C*)[N+]([O-])=O 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 210000000544 articulatio talocruralis Anatomy 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/024—Knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H2003/007—Appliances for aiding patients or disabled persons to walk about secured to the patient, e.g. with belts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/0176—By stopping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0192—Specific means for adjusting dimensions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1238—Driving means with hydraulic or pneumatic drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1463—Special speed variation means, i.e. speed reducer
- A61H2201/1472—Planetary gearing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1481—Special movement conversion means
- A61H2201/149—Special movement conversion means rotation-linear or vice versa
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/06—Differential gearings with gears having orbital motion
- F16H48/10—Differential gearings with gears having orbital motion with orbital spur gears
- F16H2048/104—Differential gearings with gears having orbital motion with orbital spur gears characterised by two ring gears
Landscapes
- Health & Medical Sciences (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Pain & Pain Management (AREA)
- Epidemiology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Rehabilitation Tools (AREA)
- Manipulator (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Retarders (AREA)
- Transmission Devices (AREA)
Abstract
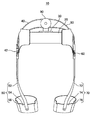
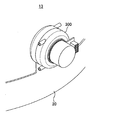
【解決手段】 一実施形態によると、駆動モジュールは、対象体の一側に設けられ、動力を伝達する駆動源と、前記駆動源に接続して回転する入力側回転体と、前記入力側回転体からそれぞれ動力が伝達されて動作する2つの減速機と、前記入力側回転体から前記それぞれの減速機の出力端に伝えられる動力を印加又は遮断する第1ストッパ及び第2ストッパを含む。
【選択図】 図1
Description
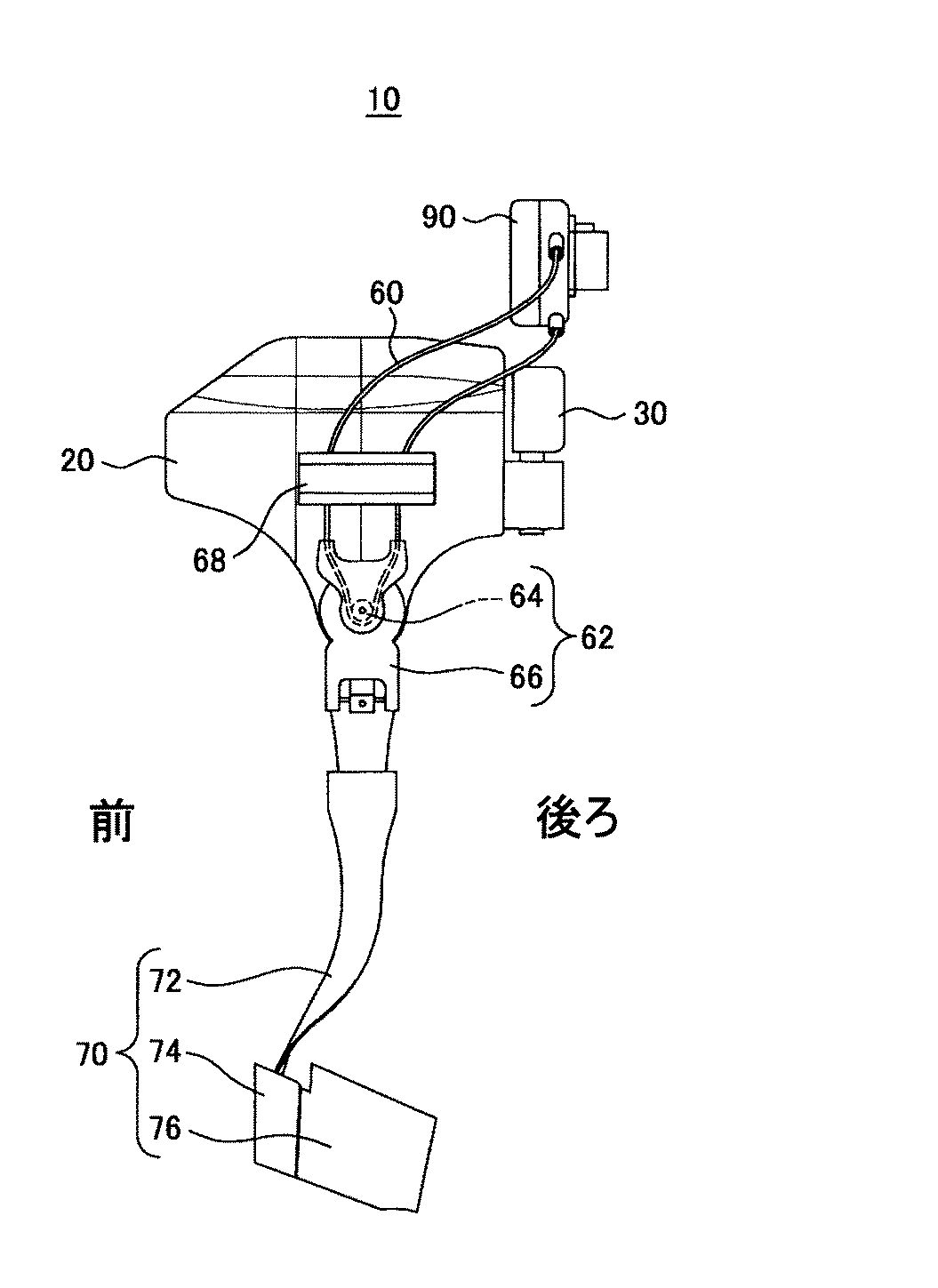
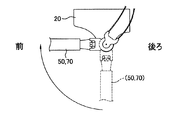
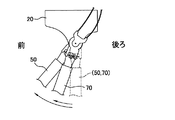
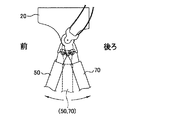
20:固定部材
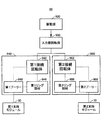
30:制御部
40、60:動力伝達部材
50、70:支持モジュール
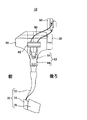
920、120、220、320、420:駆動源
930:入力側回転体
150、250、:第1ストッパ
170、270:第2ストッパ
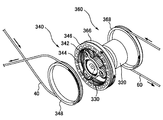
940、140、240、340、440:第1減速機
960、160、260、360、460:第2減速機
Claims (22)
- 対象体の一側に設けられ、動力を伝達する駆動源と、
前記駆動源に接続して回転する入力側回転体と、
前記入力側回転体からそれぞれ動力が伝達されて動作する2つの減速機と、
前記入力側回転体から前記それぞれの減速機の出力端に伝えられる動力を伝達又は遮断する第1ストッパ及び第2ストッパと、
を含む、駆動モジュール。 - 前記それぞれの減速機は、
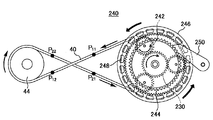
前記入力側回転体の外周面と係合し、前記入力側回転体から動力が伝達されて自転又は公転可能な遊星歯車と、
前記遊星歯車の自転軸と接続し、前記遊星歯車が前記入力側回転体に対して公転するとき回転するキャリアと、
前記遊星歯車と係合する内周面を備え、前記遊星歯車と互いに作用するリングギアと、
前記減速機の出力端として、前記入力側回転体の動力を外部に伝達するための動力伝達部材が外周面に巻かれるプーリーと、
を含む、請求項1に記載の駆動モジュール。 - 前記2つの減速機のうち第1減速機の前記プーリーは、前記第1減速機の前記キャリアと結合して前記第1減速機の前記キャリアが回転するとき回転し、
前記第1ストッパは、前記第1減速機の前記リングギアに選択的に係合して前記第1減速機の前記リングギアが回転しないようにする、
請求項2に記載の駆動モジュール。 - 前記第1減速機の前記プーリーは、前記第1減速機の前記キャリアの外周面に一体に形成される、
請求項3に記載の駆動モジュール。 - 前記2つの減速機のうち第1減速機の前記リングギアは、
回転方向を基準にして、一方向の傾斜は他方向の傾斜よりも急に形成される歯を含む第1複合リングギアと、
回転方向を基準にして、一方向の傾斜は他方向の傾斜よりも緩く形成される歯を第2複合リングギアと、
を含み、
前記第1ストッパは、
前記第1複合リングギアに係合する第1複合ストッパと、
前記第2複合リングギアに係合する第2複合ストッパと、
を含む、請求項2に記載の駆動モジュール。 - 前記2つの減速機のうち第1減速機の前記プーリーは、前記第1減速機の前記リングギアと結合して前記第1減速機の前記リングギアが回転するとき回転し、
前記第1ストッパは、前記第1減速機の前記キャリアに選択的に係合して前記第1減速機の前記遊星歯車が公転しないようにする、
請求項2に記載の駆動モジュール。 - 駆動源に接続して動力を伝達する第1回転体と、
前記第1回転体と係合して回転する第2回転体と、
前記第2回転体と係合して回転する第3回転体と、
前記第2回転体の自転軸と接続し、前記第2回転体が前記第1回転体に対して公転するとき回転する第4回転体と、
前記第1回転体と係合して回転する第5回転体と、
前記第5回転体と係合して回転する第6回転体と、
前記第6回転体の自転軸と接続し、前記第6回転体が前記第1回転体に対して公転するとき回転する第7回転体と、
を含む、駆動モジュール。 - 前記第3回転体又は第4回転体の一方に選択的に係合する第1ストッパと、
前記第6回転体又は第7回転体の一方に選択的に係合する第2ストッパと、
をさらに含む、請求項7に記載の駆動モジュール。 - 対象体に固定される固定部材と、
前記固定部材の一側に設けられ、駆動源と、前記駆動源から動力が伝達されて動作する第1減速機及び第2減速機を含む駆動モジュールと、
前記対象体の一部分及び他部分の回転動作をそれぞれ補助するための第1ジョイント部材及び第2ジョイント部材と、
前記第1減速機の出力端及び第1ジョイント部材の間で動力を伝達する第1動力伝達部材と、
前記第2減速機の出力端及び第2ジョイント部材の間で動力を伝達する第2動力伝達部材と、
前記駆動源から前記第1ジョイント部材及び第2ジョイント部材に伝えられる回転動力を伝達又は遮断するストッパモジュールと、
を含む、運動補助装置。 - 前記ストッパモジュールは、
前記第1減速機の一部を固定し、前記駆動源から前記第1動力伝達部材に動力が伝えられるようにする第1ストッパと、
前記第2減速機の一部を固定し、前記駆動源から前記第2動力伝達部材に動力が伝えられるようにする第2ストッパと、
を含む、請求項9に記載の運動補助装置。 - 前記第1減速機は、前記駆動源に結合される第1遊星歯車と、前記第1遊星歯車と係合する第1リングギアと、前記第1減速機の出力端として前記第1動力伝達部材が巻かれる第1プーリーとを含み、
前記第2減速機は、前記駆動源に結合される第2遊星歯車と、前記第2遊星歯車と係合する第2リングギアと、前記第2減速機の出力端として前記第2動力伝達部材が巻かれる第2プーリーとを含む、
請求項10に記載の運動補助装置。 - 前記第1動力伝達部材及び前記第2動力伝達部材は、互いに非対称的に前記駆動モジュールと接続する、
請求項11に記載の運動補助装置。 - 前記第1動力伝達部材は、前記第1プーリー及び前記第1ジョイント部材の間で交差するように接続し、前記第1プーリーの回転方向及び前記第1ジョイント部材の回転方向が互いに反対になるようにし、
前記第2動力伝達部材は、前記第2プーリー及び前記第2ジョイント部材の間で交差しないように接続し、前記第2プーリーの回転方向及び前記第2ジョイント部材の回転方向が互いに一致するようにする、
請求項11又は12に記載の運動補助装置。 - 前記第1プーリー及び前記第2プーリーはそれぞれ、前記第1減速機の第1キャリア及び前記第2減速機の第2キャリアと結合し、前記第1キャリア及び前記第2キャリアが回転するとき回転し、
前記第1ストッパ及び前記第2ストッパはそれぞれ、前記第1リングギア及び前記第2リングギアに選択的にそれぞれ係合し、前記第1リングギア及び前記第2リングギアがそれぞれ回転しないようにする、
請求項11又は12に記載の運動補助装置。 - 前記第1プーリー及び前記第2プーリーは、それぞれ、前記第1リングギア及び前記第2リングギアと結合し、前記第1リングギア及び前記第2リングギアが回転するとき回転し、
前記第1ストッパ及び前記第2ストッパは、それぞれ、前記第1減速機の第1キャリア及び前記第2減速機の第2キャリアに選択的に係合し、前記第1キャリア及び前記第2キャリアがそれぞれ回転しないようにする、
請求項11又は12に記載の運動補助装置。 - 前記第1動力伝達部材及び第2動力伝達部材は、互いに対称的に前記駆動モジュールと接続する、
請求項11に記載の運動補助装置。 - 前記第1プーリーは、前記第1リングギアと1つの剛体運動するように固定され、
前記第1ストッパは、前記第1減速機の第1キャリアに選択的に係合して前記第1キャリアを回転しないようにし、
前記第2プーリーは、前記第2減速機の第2キャリアと1つの剛体運動するように固定し、
前記第2ストッパは、前記第2リングギアに選択的に係合して前記第2キャリアが回転しないようにする、
請求項11又は16に記載の運動補助装置。 - 対象体に固定される固定部材と、
前記固定部材の一側に設けられ、駆動源と、前記駆動源から動力が伝達されて動作する第1減速機及び第2減速機を含む駆動モジュールと、
前記対象体の一部分及び他部分をそれぞれ支持する第1支持部材及び第2支持部材と、
前記第1減速機の出力端及び第1支持部材の間で動力を伝達する第1動力伝達部材と、
前記第2減速機の出力端及び第2支持部材の間で動力を伝達する第2動力伝達部材と、
前記駆動源から前記第1支持部材及び第2支持部材に伝えられる動力を伝達又は遮断するストッパと、
を含む、運動補助装置。 - 対象体に固定される固定部材と、駆動源と、対象体の一部分及び他部分の回転動作をそれぞれ補助するための第1ジョイント部材及び第2ジョイント部材を含む運動補助装置の制御方法において、
前記駆動源を一方向に回転して前記駆動源に接続された第1減速機及び第2減速機に動力を伝達するステップと、
第1ストッパが前記第1減速機の一部に選択的に係合し、前記駆動源から前記第1ジョイント部材に伝えられる回転動力を伝達又は遮断させるステップと、
第2ストッパが前記第2減速機の一部に選択的に係合し、前記駆動源から前記第2ジョイント部材に伝えられる回転動力を伝達又は遮断させるステップと、
を含む、運動補助装置の制御方法。 - 前記第1ストッパが前記第1減速機の一部に係合されるステップと、前記第2ストッパが前記第2減速機の一部に係合されるステップとが交互に行われる、
請求項19に記載の運動補助装置の制御方法。 - 前記第1ストッパが前記第1減速機の一部に係合されるステップと、前記第2ストッパが前記第2減速機の一部に係合されるステップとが同時に行われる、
請求項19に記載の運動補助装置の制御方法。 - 前記第1ストッパが前記第1減速機の一部から係合を解除されるステップと、前記第2ストッパが前記第2減速機の一部から係合を解除されるステップとが同時に行われる、
請求項19に記載の運動補助装置の制御方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2014-0101689 | 2014-08-07 | ||
| KR1020140101689A KR102125078B1 (ko) | 2014-08-07 | 2014-08-07 | 구동 모듈, 구동 모듈을 포함하는 운동 보조 장치 및 운동 보조 장치의 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016036902A true JP2016036902A (ja) | 2016-03-22 |
| JP6527011B2 JP6527011B2 (ja) | 2019-06-05 |
Family
ID=53489771
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015090586A Active JP6527011B2 (ja) | 2014-08-07 | 2015-04-27 | 駆動モジュール、駆動モジュールを含む運動補助装置及び運動補助装置の制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10285892B2 (ja) |
| EP (1) | EP2982360B1 (ja) |
| JP (1) | JP6527011B2 (ja) |
| KR (1) | KR102125078B1 (ja) |
| CN (2) | CN110170990B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016202620A (ja) * | 2015-04-23 | 2016-12-08 | 本田技研工業株式会社 | 動作補助装置 |
| CN111283659A (zh) * | 2018-12-10 | 2020-06-16 | 株式会社捷太格特 | 动力辅助服 |
| JP2020093310A (ja) * | 2018-12-10 | 2020-06-18 | 株式会社ジェイテクト | パワーアシストスーツ |
| JP2020093311A (ja) * | 2018-12-10 | 2020-06-18 | 株式会社ジェイテクト | パワーアシストスーツ |
| JP2021049309A (ja) * | 2019-09-24 | 2021-04-01 | 信幸 吉澤 | 歩行補助装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102167182B1 (ko) * | 2014-07-29 | 2020-10-16 | 삼성전자주식회사 | 구동 모듈 및 이를 포함하는 운동 보조 장치 |
| WO2016128877A1 (en) * | 2015-02-09 | 2016-08-18 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant'anna | Actuation system for hip orthosis |
| EP3173053A1 (en) | 2015-11-26 | 2017-05-31 | Samsung Electronics Co., Ltd. | Frame assembly and motion assistance apparatus including the same |
| KR102637517B1 (ko) | 2016-09-06 | 2024-02-19 | 삼성전자주식회사 | 동력 전달 기기, 운동 보조 장치 및 그 제어 방법 |
| WO2018052974A1 (en) * | 2016-09-14 | 2018-03-22 | Kaminsky Sean | Dynamic arm brace assemblies and methods of use |
| CN106491317B (zh) * | 2016-12-01 | 2018-12-25 | 北京理工大学 | 一种自驱动自适应步态的可穿戴膝关节助行装备 |
| CN106491318B (zh) * | 2016-12-01 | 2018-12-25 | 北京理工大学 | 一种无动力可穿戴式辅助行走助力机构 |
| CN106943278A (zh) * | 2017-04-18 | 2017-07-14 | 上海理工大学 | 中央驱动式下肢外骨骼机器人 |
| CN107049715B (zh) * | 2017-05-17 | 2019-02-12 | 山东科技大学 | 一种适于医疗康复、矫正或训练使用的助力行走机器人 |
| CN109202863B (zh) * | 2017-07-04 | 2023-06-23 | 现代自动车株式会社 | 可穿戴式肌肉力量辅助装置及其控制方法和系统 |
| KR102479563B1 (ko) * | 2017-07-24 | 2022-12-20 | 삼성전자주식회사 | 운동 보조 장치 |
| KR102454977B1 (ko) * | 2017-10-16 | 2022-10-14 | 삼성전자주식회사 | 액츄에이터 및 이를 포함하는 운동 보조 장치 |
| DE102020121921A1 (de) * | 2019-10-31 | 2021-05-06 | Adient Engineering and IP GmbH | Beschlag für einen fahrzeugsitz |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5536358A (en) * | 1978-09-06 | 1980-03-13 | Murata Machinery Ltd | Apparatus for automatically exchanging cylinder shaft rotation to left and right direction of dobby machine |
| JPH02236041A (ja) * | 1989-03-06 | 1990-09-18 | Suzuka Saakitsuto Rand:Kk | 自走式遊戯車両の変速装置 |
| JPH03186640A (ja) * | 1989-12-13 | 1991-08-14 | Hitachi Ltd | 遊星歯車装置 |
| JPH1170179A (ja) * | 1997-05-06 | 1999-03-16 | Kyung-Joo Kim | 外壁昇・下降用昇降機 |
| JP2006220272A (ja) * | 2005-02-14 | 2006-08-24 | Rikogaku Shinkokai | 多段変速装置 |
| JP2010526562A (ja) * | 2007-04-23 | 2010-08-05 | ジュリウス ブルム ゲゼルシャフト エム.ビー.エイチ. | 移動家具部用の駆動部 |
| KR101272716B1 (ko) * | 2013-01-07 | 2013-06-11 | 현대 파워텍 주식회사 | 차량용 감속장치 |
| KR101316523B1 (ko) * | 2012-03-20 | 2013-10-08 | 주식회사 포스코 | 근력지원 관절구동장치 |
| US20130324348A1 (en) * | 2012-05-31 | 2013-12-05 | GM Global Technology Operations LLC | Differential with integrated torque vectoring |
| JP2014073199A (ja) * | 2012-10-03 | 2014-04-24 | Equos Research Co Ltd | 歩行支援装置、及び歩行支援プログラム |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1317075A (en) * | 1919-09-23 | couse | ||
| JPS5536358B2 (ja) | 1973-06-25 | 1980-09-19 | ||
| US4471669A (en) * | 1982-01-21 | 1984-09-18 | J. I. Case Company | Track drive system with dual mode steering |
| US4738161A (en) * | 1986-08-05 | 1988-04-19 | Ivy Jessie T | Steerable differential and steering assembly for a vehicle |
| US5569109A (en) * | 1993-01-28 | 1996-10-29 | Kabushiki Kaisha Komatsu Seisakusho | Geared steering device for crawler vehicle and control system therefor |
| CN2201327Y (zh) | 1994-07-11 | 1995-06-21 | 褚国瑞 | 多功能方便自行车 |
| KR0124707Y1 (ko) | 1995-04-28 | 1998-12-15 | 김장식 | 전기,통신용 노출박스 |
| JP3103779B2 (ja) * | 1996-11-22 | 2000-10-30 | 建治 三村 | 差動装置 |
| US5975224A (en) * | 1997-12-10 | 1999-11-02 | Caterpillar Inc. | Method for controlling steering in a hydrostatic drive system having differential steer |
| EP1547568B1 (en) * | 2002-08-30 | 2013-01-02 | Honda Giken Kogyo Kabushiki Kaisha | Speed reducer for walk assist apparatus |
| US6830530B2 (en) * | 2002-09-25 | 2004-12-14 | Visteon Global Technologies, Inc. | Torque biasing planetary differential |
| US7578334B2 (en) * | 2005-06-03 | 2009-08-25 | Hunter Douglas Inc. | Control system for architectural coverings with reversible drive and single operating element |
| US20050273025A1 (en) * | 2004-05-19 | 2005-12-08 | Houser Guy M | Braces having an assembly for exerting a manually adjustable force on a limb of a user |
| CN101443572A (zh) | 2004-11-09 | 2009-05-27 | 东北大学 | 电流变流体制动及致动装置以及使用该装置的矫形器 |
| EP1874239B1 (en) | 2005-04-13 | 2014-06-11 | The Regents of The University of California | Semi-powered lower extremity exoskeleton |
| DE102005042716B3 (de) * | 2005-09-02 | 2007-03-01 | Schunk Gmbh & Co. Kg Fabrik Für Spann- Und Greifwerkzeuge | Getriebe, insbesondere Gelenkgetriebe |
| KR20080000789A (ko) | 2006-06-28 | 2008-01-03 | 주식회사 오디녹스 | 다중 동력 전달을 위한 양방향 클러치가 적용된 액츄에이터 |
| CN100529466C (zh) | 2007-02-12 | 2009-08-19 | 湖南江麓容大车辆传动股份有限公司 | 电力机械行星机构无级变速传动系统 |
| US7648002B2 (en) * | 2007-06-08 | 2010-01-19 | Deere & Company | Vehicle with coordinated Ackerman and differential steering |
| KR100955202B1 (ko) | 2007-10-30 | 2010-04-29 | 심길섭 | 어깨교정 장치 및 어깨교정 장치가 포함된 자세교정 장치 |
| JP5273773B2 (ja) | 2008-03-31 | 2013-08-28 | 独立行政法人国立高等専門学校機構 | 歩行支援装置。 |
| JP5075759B2 (ja) | 2008-08-07 | 2012-11-21 | 本田技研工業株式会社 | 歩行補助装置 |
| JP5536358B2 (ja) | 2009-03-31 | 2014-07-02 | 株式会社日立メディコ | 磁気共鳴イメージング装置及び感度補正方法 |
| JP5306971B2 (ja) * | 2009-11-19 | 2013-10-02 | 株式会社小松製作所 | 作業用車両の動力伝達装置 |
| CN201552574U (zh) * | 2009-12-18 | 2010-08-18 | 中国科学院沈阳自动化研究所 | 模块化可重构机器人 |
| US8603016B2 (en) | 2010-01-11 | 2013-12-10 | Honda Motor Co., Ltd. | Walking assistance device |
| AU2011237357B2 (en) | 2010-04-09 | 2016-05-19 | Deka Products Limited Partnership | System and apparatus for robotic device and methods of using thereof |
| ES2636946T3 (es) | 2010-09-27 | 2017-10-10 | Vanderbilt University | Dispositivo de asistencia al movimiento |
| CN102431039B (zh) * | 2010-09-29 | 2014-12-10 | 鸿富锦精密工业(深圳)有限公司 | 机械手臂 |
| CN103260576B (zh) | 2010-12-16 | 2015-04-22 | 丰田自动车株式会社 | 行走辅助装置 |
| EP2685946B1 (en) * | 2011-03-14 | 2017-05-03 | Cadence Biomedical, Inc. | Orthosis |
| KR101797475B1 (ko) | 2011-05-24 | 2017-11-15 | 대우조선해양 주식회사 | 착용 로봇용 그리퍼장치 |
| DE102011113747A1 (de) * | 2011-09-14 | 2013-03-14 | Keiper Gmbh & Co. Kg | Beschlagsystem für einen Fahrzeugsitz |
| US9682005B2 (en) | 2012-02-24 | 2017-06-20 | Massachusetts Institute Of Technology | Elastic element exoskeleton and method of using same |
| KR101368817B1 (ko) | 2012-04-02 | 2014-03-03 | 유승현 | 보행 보조장치 |
| JP2014030338A (ja) | 2012-06-28 | 2014-02-13 | Nidec Copal Electronics Corp | 薄型ギヤモータおよび該薄型ギヤモータを用いた筋力アシスト装置 |
| WO2014089157A1 (en) * | 2012-12-04 | 2014-06-12 | Mtd Products Inc | Vehicle drive control systems |
| KR101324501B1 (ko) | 2013-01-08 | 2013-11-01 | 주식회사 엔티리서치 | 근력증폭장치의 골격구조 |
| US8556758B1 (en) | 2013-02-07 | 2013-10-15 | GM Global Technology Operations LLC | Hybrid powertrain |
| KR102117079B1 (ko) * | 2014-10-20 | 2020-05-29 | 삼성전자주식회사 | 구동 모듈, 구동 모듈을 포함하는 운동 보조 장치 및 운동 보조 장치의 제어 방법 |
| CN110430804A (zh) * | 2017-01-16 | 2019-11-08 | 皇家飞利浦有限公司 | 组合了二氧化碳测定和氧饱和度的生理监测决策支持系统 |
-
2014
- 2014-08-07 KR KR1020140101689A patent/KR102125078B1/ko active IP Right Grant
-
2015
- 2015-01-09 US US14/593,680 patent/US10285892B2/en active Active
- 2015-04-07 CN CN201910479797.0A patent/CN110170990B/zh active Active
- 2015-04-07 CN CN201510162252.9A patent/CN106137684B/zh active Active
- 2015-04-27 JP JP2015090586A patent/JP6527011B2/ja active Active
- 2015-05-11 EP EP15167099.9A patent/EP2982360B1/en active Active
-
2019
- 2019-04-03 US US16/374,269 patent/US11672722B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5536358A (en) * | 1978-09-06 | 1980-03-13 | Murata Machinery Ltd | Apparatus for automatically exchanging cylinder shaft rotation to left and right direction of dobby machine |
| JPH02236041A (ja) * | 1989-03-06 | 1990-09-18 | Suzuka Saakitsuto Rand:Kk | 自走式遊戯車両の変速装置 |
| JPH03186640A (ja) * | 1989-12-13 | 1991-08-14 | Hitachi Ltd | 遊星歯車装置 |
| JPH1170179A (ja) * | 1997-05-06 | 1999-03-16 | Kyung-Joo Kim | 外壁昇・下降用昇降機 |
| JP2006220272A (ja) * | 2005-02-14 | 2006-08-24 | Rikogaku Shinkokai | 多段変速装置 |
| JP2010526562A (ja) * | 2007-04-23 | 2010-08-05 | ジュリウス ブルム ゲゼルシャフト エム.ビー.エイチ. | 移動家具部用の駆動部 |
| KR101316523B1 (ko) * | 2012-03-20 | 2013-10-08 | 주식회사 포스코 | 근력지원 관절구동장치 |
| US20130324348A1 (en) * | 2012-05-31 | 2013-12-05 | GM Global Technology Operations LLC | Differential with integrated torque vectoring |
| JP2014073199A (ja) * | 2012-10-03 | 2014-04-24 | Equos Research Co Ltd | 歩行支援装置、及び歩行支援プログラム |
| KR101272716B1 (ko) * | 2013-01-07 | 2013-06-11 | 현대 파워텍 주식회사 | 차량용 감속장치 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016202620A (ja) * | 2015-04-23 | 2016-12-08 | 本田技研工業株式会社 | 動作補助装置 |
| US10786417B2 (en) | 2015-04-23 | 2020-09-29 | Honda Motor Co., Ltd. | Motion assist device |
| CN111283659A (zh) * | 2018-12-10 | 2020-06-16 | 株式会社捷太格特 | 动力辅助服 |
| JP2020093310A (ja) * | 2018-12-10 | 2020-06-18 | 株式会社ジェイテクト | パワーアシストスーツ |
| JP2020093311A (ja) * | 2018-12-10 | 2020-06-18 | 株式会社ジェイテクト | パワーアシストスーツ |
| JP2021049309A (ja) * | 2019-09-24 | 2021-04-01 | 信幸 吉澤 | 歩行補助装置 |
| JP7024940B2 (ja) | 2019-09-24 | 2022-02-24 | 信幸 吉澤 | 歩行補助装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110170990A (zh) | 2019-08-27 |
| US20190224064A1 (en) | 2019-07-25 |
| EP2982360A3 (en) | 2016-03-02 |
| US10285892B2 (en) | 2019-05-14 |
| JP6527011B2 (ja) | 2019-06-05 |
| CN110170990B (zh) | 2022-07-12 |
| US11672722B2 (en) | 2023-06-13 |
| KR20160017953A (ko) | 2016-02-17 |
| EP2982360B1 (en) | 2019-04-17 |
| KR102125078B1 (ko) | 2020-06-19 |
| CN106137684A (zh) | 2016-11-23 |
| EP2982360A2 (en) | 2016-02-10 |
| US20160038368A1 (en) | 2016-02-11 |
| CN106137684B (zh) | 2019-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6794500B2 (ja) | 駆動モジュール及び駆動モジュールを含む運動補助装置 | |
| JP6527011B2 (ja) | 駆動モジュール、駆動モジュールを含む運動補助装置及び運動補助装置の制御方法 | |
| KR102117079B1 (ko) | 구동 모듈, 구동 모듈을 포함하는 운동 보조 장치 및 운동 보조 장치의 제어 방법 | |
| US11931310B2 (en) | Driving module and motion assistance apparatus including the same | |
| KR102167182B1 (ko) | 구동 모듈 및 이를 포함하는 운동 보조 장치 | |
| KR102637517B1 (ko) | 동력 전달 기기, 운동 보조 장치 및 그 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6527011 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |