JP2015519592A - WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ - Google Patents
WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ Download PDFInfo
- Publication number
- JP2015519592A JP2015519592A JP2015503226A JP2015503226A JP2015519592A JP 2015519592 A JP2015519592 A JP 2015519592A JP 2015503226 A JP2015503226 A JP 2015503226A JP 2015503226 A JP2015503226 A JP 2015503226A JP 2015519592 A JP2015519592 A JP 2015519592A
- Authority
- JP
- Japan
- Prior art keywords
- map
- transmitter
- processor
- route
- trajectory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/005—Map projections or methods associated specifically therewith
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/021—Services related to particular areas, e.g. point of interest [POI] services, venue services or geofences
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/33—Services specially adapted for particular environments, situations or purposes for indoor environments, e.g. buildings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/003—Locating users or terminals or network equipment for network management purposes, e.g. mobility management locating network equipment
Abstract
Description
[0003] 本開示は、一般的に、ビルディングマップまたは他のルートマップをアクセスポイント(AP)マップまたは他の送信機マップとマージする装置および方法に関し、より詳細には、最良適合を見つけるために、ビルディングマップの様々なオリエンテーションを通じて、APマップに関連する、軌道を適用することに関する。
[0005] 典型的に、Wi-Fi(登録商標)ネットワークを使用する屋内ポジショニングおよびルーティングは、ビルディングのレイアウトおよびアクセスポイント(AP)の位置の両方を示すマップに基づくことができる。Wi−Fiを使用する屋内ポジショニングおよびルーティングのために使用されるマップは、アクセスポイント(AP)の位置を示すAPマップ、および壁、通路、ドア、窓などの位置を示すビルディングマップの2つの別個のマップを組み合わせることによって生成されることができる。

Claims (36)
- ばらばらのマップをマージするためのプロセッサにより実現される方法であって、前記方法は、
経路マップを含むデジタルファイルを受信することと、
複数の送信機に関する識別子を含む送信機マップを受信することと、
前記送信機マップに関連して、モバイルデバイスの第1の軌道プロットを受信することと、
前記送信機マップと前記経路マップとの間の一意の変換を各々定義する複数の仮説を設定することと、
前記プロセッサにおいて、複数のコストを計算することと、ここにおいて、前記複数のコストの各コストは、前記複数の仮説のそれぞれ1つに基づいて、前記経路マップを通る前記第1の軌道プロットのコストを含む、
前記複数のコストの最小値に基づいて、前記複数の仮説から1つの仮説を選択することと、
を含む、方法。 - 前記経路マップは、間取り図を含むビルディングマップを含む、請求項1に記載のプロセッサにより実現される方法。
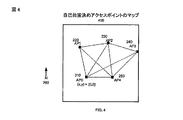
- 前記送信機マップは、アクセスポイント(AP)マップを含み、前記複数の送信機は、複数のアクセスポイントに関する識別子を含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップのソースは、前記経路マップのソースから独立している、請求項1に記載のプロセッサにより実現される方法。
- 前記経路マップのソースは、ベニューオペレータに関連するソースを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記経路マップの前記ソースは、前記複数の送信機の位置の知識がないソースを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記経路マップはさらに、前記経路マップの少なくとも1つの点をジオロケーションに固定する前記ジオロケーションを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記経路マップを別個のノードのセットに量子化することをさらに含む、請求項1に記載のプロセッサにより実現される方法。
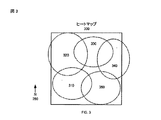
- 前記送信機マップは、RSSI(受信された信号強度表示)マップを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップは、RTT(往復時間)マップを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップはさらに、前記複数の送信機の少なくとも1つをジオロケーションに固定する前記ジオロケーションを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップは、デバイスのSLAP(自己位置決めアクセスポイント)セットを含む、請求項1に記載のプロセッサにより実現される方法。
- 前記複数のアクセス送信機は、管理されたネットワークの少なくとも一部を含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップと前記経路マップとの間の前記一意の変換は、前記マップと前記経路マップとの間の相対的回転を含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップと前記経路マップとの間の前記一意の変換は、前記マップと前記経路マップとの間の相対的拡大縮小を含む、請求項1に記載のプロセッサにより実現される方法。
- 前記送信機マップに関連する複数の軌道プロットを受信することをさらに含む、請求項1に記載のプロセッサにより実現される方法。
- 前記複数の仮説の前記それぞれ1つに基づいた前記経路マップを通る前記第1の軌道プロットのコストは、前記複数の仮説の前記それぞれ1つに基づいた別個のノードのセットによる前記第1の軌道プロットのコストを含む、請求項11に記載のプロセッサにより実現される方法。
- マージされたマップを形成するために、前記経路マップおよび前記軌道プロットの最良適合として選択された前記1つの仮説を適用することをさらに含む、請求項1に記載のプロセッサにより実現される方法。
- 選択された前記1つの仮説、前記送信機マップ、および前記経路マップに基づいてマージされたマップを生成することをさらに含む、請求項1に記載のプロセッサにより実現される方法。
- 前記経路マップはさらに、前記経路マップの少なくとも1つの点を第1のジオロケーションに固定する前記第1のジオロケーションを含み、ここにおいて、前記第1のジオロケーションは第1の不確かさを有する、
前記送信機マップはさらに、前記複数のアクセスポイントの少なくとも1つを第2のジオロケーションに固定する前記第2のジオロケーションを含み、ここにおいて、前記第2のジオロケーションは第2の不確かさを有する、
前記マージされたマップは、前記第1の不確かさプラス前記第2の不確かさよりも小さい第3の不確かさを含む、
請求項1に記載のプロセッサにより実現される方法。 - 前記方法は、
コンピューティングデバイス、または、
モバイルデバイス、または、
アクセスポイント、または、
インテリジェントなアクセスポイント、
のうちの少なくとも1つ上で実現される、請求項1に記載のプロセッサにより実現される方法。 - ばらばらのマップをマージするためのモバイルデバイスであって、前記デバイスは、
ルートマップを含むデジタルファイルを受信する手段と、
複数の送信機に関する識別子を含む送信機マップを受信する手段と、
前記送信機マップに関連して、モバイルデバイスの第1の軌道プロットを受信する手段と、
前記送信機マップと前記ルートマップとの間の一意の変換を各々定義する複数の仮説を設定する手段と、
複数のコストを計算する手段と、ここにおいて、前記複数のコストの各コストは、前記複数の仮説のそれぞれ1つに基づいて、前記ルートマップを通る前記第1の軌道プロットのコストを含む、
前記複数のコストの最小値に基づいて、前記複数の仮説から1つの仮説を選択する手段と、
を含む、モバイルデバイス。 - 前記送信機マップのソースは、前記ルートマップのソースから独立している、請求項22に記載のデバイス。
- 前記ルートマップを別個のノードのセットに量子化することをさらに含む、請求項22に記載のデバイス。
- 前記送信機マップは、RSSI(受信された信号強度表示)マップを含む、請求項22に記載のデバイス。
- 前記送信機マップは、RTT(往復時間)マップを含む、請求項22に記載のデバイス。
- 前記送信機マップと前記ルートマップとの間の前記一意の変換は、前記マップと前記ルートマップとの間の相対的回転を含む、請求項22に記載のデバイス。
- 前記送信機マップと前記ルートマップとの間の前記一意の変換は、前記マップと前記ルートマップとの間の相対的拡大縮小を含む、請求項22に記載のデバイス。
- 前記送信機マップに関連する複数の軌道プロットを受信する手段をさらに含む、請求項22に記載のデバイス。
- マージされたマップを形成するために、前記ルートマップと前記軌道プロットの最良適合として選択された前記1つの仮説を適用する手段をさらに含む、請求項22に記載のデバイス。
- 選択された前記1つの仮説、前記送信機マップ、および前記ルートマップに基づいてマージされたマップを生成する手段をさらに含む、請求項22に記載のデバイス。
- ばらばらのマップをマージするためのメモリおよびプロセッサを含むデバイスであって、前記メモリは、
ルートマップを含むデジタルファイルを受信することと、
複数の送信機に関する識別子を含む送信機マップを受信することと、
前記送信機マップに関連して、モバイルデバイスの第1の軌道プロットを受信することと、
前記送信機マップと前記ルートマップとの間の一意の変換を各々定義する複数の仮説を設定することと、
複数のコストを計算することと、ここにおいて、前記複数のコストの各コストは、前記複数の仮説のそれぞれ1つに基づいて、前記ルートマップを通る前記第1の軌道プロットのコストを含む、
前記複数のコストの最小値に基づいて、前記複数の仮説から1つの仮説を選択することと、
を行うソフトウェア命令を含む、デバイス。 - マージされたマップを形成するために、前記ルートマップおよび前記軌道プロットの最良適合として選択された前記1つの仮説を適用することをさらに含む、請求項32に記載のデバイス。
- 選択された前記1つの仮説、前記送信機マップ、および前記ルートマップに基づいてマージされたマップを生成することをさらに含む、請求項32に記載のデバイス。
- 前記デバイスは、
コンピューティングデバイス、または、
モバイルデバイス、または、
アクセスポイント、または、
インテリジェントなアクセスポイント、
のうちの少なくとも1つである、請求項32に記載のデバイス。 - プログラムコードを記録したコンピュータ読取可能な記憶媒体であって、
ルートマップを含むデジタルファイルを受信することと、
複数の送信機に関する識別子を含む送信機マップを受信することと、
前記送信機マップに関連して、モバイルデバイスの第1の軌道プロットを受信することと、
前記送信機マップと前記ルートマップとの間の一意の変換を各々定義する複数の仮説を設定することと、
プロセッサにおいて、複数のコストを計算することと、ここにおいて、前記複数のコストの各コストは、前記複数の仮説のそれぞれ1つに基づいて、前記ルートマップを通る前記第1の軌道プロットのコストを含む、
前記複数のコストの最小値に基づいて、前記複数の仮説から1つの仮説を選択することと、
のためのプログラムコードを含む、コンピュータ読取可能な記憶媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/436,600 | 2012-03-30 | ||
| US13/436,600 US8838376B2 (en) | 2012-03-30 | 2012-03-30 | Mashup of AP location and map information for WiFi based indoor positioning |
| PCT/US2013/028937 WO2013148077A1 (en) | 2012-03-30 | 2013-03-04 | Mashup of ap location and map information for wifi based indoor positioning |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017167077A Division JP2018023124A (ja) | 2012-03-30 | 2017-08-31 | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015519592A true JP2015519592A (ja) | 2015-07-09 |
| JP2015519592A5 JP2015519592A5 (ja) | 2016-03-31 |
Family
ID=47902359
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015503226A Ceased JP2015519592A (ja) | 2012-03-30 | 2013-03-04 | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ |
| JP2017167077A Pending JP2018023124A (ja) | 2012-03-30 | 2017-08-31 | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017167077A Pending JP2018023124A (ja) | 2012-03-30 | 2017-08-31 | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8838376B2 (ja) |
| EP (1) | EP2831544A1 (ja) |
| JP (2) | JP2015519592A (ja) |
| KR (1) | KR20150001779A (ja) |
| CN (1) | CN104204723B (ja) |
| WO (1) | WO2013148077A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018525627A (ja) * | 2015-11-06 | 2018-09-06 | 三菱電機株式会社 | デバイスの位置を位置合わせする方法及びデバイス |
| JP2021056026A (ja) * | 2019-09-27 | 2021-04-08 | サイレックス・テクノロジー株式会社 | 特定装置、特定方法、および、プログラム |
| WO2022113172A1 (ja) * | 2020-11-24 | 2022-06-02 | 三菱電機株式会社 | 位置推定装置、設備機器システム、位置推定方法、および、プログラム |
Families Citing this family (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8706413B2 (en) * | 2011-10-17 | 2014-04-22 | Qualcomm Incorporated | Determining a likelihood of a directional transition at a junction in an encoded routability graph description |
| US9462210B2 (en) | 2011-11-04 | 2016-10-04 | Remote TelePointer, LLC | Method and system for user interface for interactive devices using a mobile device |
| US9014716B2 (en) | 2012-04-10 | 2015-04-21 | Qualcomm Incorporated | Techniques for processing perceived routability constraints that may or may not affect movement of a mobile device within an indoor environment |
| US9123152B1 (en) | 2012-05-07 | 2015-09-01 | Google Inc. | Map reports from vehicles in the field |
| US9226111B2 (en) | 2012-11-21 | 2015-12-29 | Apple Inc. | Pathway matching |
| US8849308B2 (en) | 2012-11-21 | 2014-09-30 | Apple Inc. | Tiling of map data |
| US8996302B2 (en) | 2012-11-30 | 2015-03-31 | Apple Inc. | Reduction of the impact of hard limit constraints in state space models |
| US10548150B2 (en) * | 2013-03-14 | 2020-01-28 | Federated Wireless, Inc. | Radio resource management |
| US9146299B2 (en) | 2013-08-06 | 2015-09-29 | Qualcomm Incorporated | Method and apparatus for position estimation using trajectory |
| MX2016004704A (es) * | 2013-10-17 | 2016-12-09 | Intel Corp | Metodo y aparato para determinar huellas digitales del tiempo de vuelo y la geolocalizacion. |
| US9357520B2 (en) * | 2014-01-31 | 2016-05-31 | Google Inc. | Methods and systems for signal diffusion modeling for a discretized map of signal strength |
| US9419731B2 (en) | 2014-02-05 | 2016-08-16 | Google Inc. | Methods and systems for determining signal strength maps for wireless access points robust to measurement counts |
| IN2014MU00776A (ja) * | 2014-03-07 | 2015-09-25 | Tata Consultancy Services Ltd | |
| WO2015152884A1 (en) * | 2014-03-31 | 2015-10-08 | Intel IP Corporation | Methods and apparatus for access point location token |
| US9408038B2 (en) * | 2014-04-25 | 2016-08-02 | Aruba Networks, Inc. | Filtering out access point data based on non-conformity with other access point data |
| US10009733B2 (en) | 2014-05-13 | 2018-06-26 | Samsung Electronics Co., Ltd. | Method and system for determining a position of a mobile device by an access point |
| US9528837B2 (en) * | 2014-06-04 | 2016-12-27 | Qualcomm Incorporated | Mobile device position uncertainty based on a measure of potential hindrance of an estimated trajectory |
| CN106575454A (zh) | 2014-06-11 | 2017-04-19 | 威尔蒂姆Ip公司 | 基于生物特征信息帮助用户访问车辆的系统和方法 |
| US9712975B2 (en) | 2014-06-29 | 2017-07-18 | Aruba Networks, Inc. | System and method for displaying mobility trails for mobile clients |
| CN105333868A (zh) * | 2014-06-30 | 2016-02-17 | 奇点新源国际技术开发(北京)有限公司 | 一种定位方法、装置及系统 |
| US9838846B1 (en) | 2014-08-01 | 2017-12-05 | Google Llc | Extraction of walking direction from device orientation and reconstruction of device orientation during optimization of walking direction |
| US10209062B1 (en) | 2014-08-01 | 2019-02-19 | Google Llc | Use of offline algorithm to determine location from previous sensor data when location is requested |
| US10240995B2 (en) | 2014-08-01 | 2019-03-26 | Google Llc | Construction of a surface of best GPS visibility from passive traces using SLAM for horizontal localization and GPS readings and barometer readings for elevation estimation |
| CN104168578A (zh) * | 2014-08-11 | 2014-11-26 | 无锡高联信息技术有限公司 | 用于lte系统和大数据管理的信号分布构建方法 |
| JP2016045127A (ja) * | 2014-08-25 | 2016-04-04 | 株式会社協和エクシオ | ビーコンを用いた測位システム |
| WO2016079656A1 (en) * | 2014-11-18 | 2016-05-26 | Egypt-Japan University Of Science And Technology | Zero-calibration accurate rf-based localization system for realistic environments |
| CN104657755A (zh) * | 2014-12-11 | 2015-05-27 | 中国科学院自动化研究所北仑科学艺术实验中心 | 室内工作人员定位和文件管理系统及其监控方法 |
| US9301100B1 (en) | 2015-07-20 | 2016-03-29 | Blackberry Limited | Indoor positioning systems and wireless fingerprints |
| TWI575222B (zh) * | 2015-09-11 | 2017-03-21 | 蹦世界數位創意股份有限公司 | 基於區域佈局影像產生導引路網的資料處理系統及方法 |
| US10185788B2 (en) * | 2015-10-13 | 2019-01-22 | Samsung Electronics Co., Ltd. | Rule based completion of maps with partial data |
| CN105208217B (zh) * | 2015-10-23 | 2019-02-12 | Oppo广东移动通信有限公司 | 一种事件提醒方法及装置 |
| US9848301B2 (en) | 2015-11-20 | 2017-12-19 | At&T Intellectual Property I, L.P. | Facilitation of mobile device geolocation |
| US9667809B1 (en) | 2016-01-06 | 2017-05-30 | International Business Machines Corporation | Global data service device connection manager |
| CN105516927A (zh) * | 2016-01-15 | 2016-04-20 | 深圳市国创新能源研究院 | 一种基于wifi的无线设备轨迹分析方法、装置和系统 |
| CN109155920B (zh) * | 2016-04-12 | 2021-11-05 | 意大利电信股份公司 | 无线电接入网络节点 |
| CN105954717B (zh) * | 2016-04-22 | 2019-04-02 | 上海潘氏投资管理有限公司 | 位置获取方法及装置 |
| US20180204157A1 (en) * | 2016-06-06 | 2018-07-19 | Beijing Didi Infinity Technology And Development Co., Ltd. | Systems and methods for allocating appointment orders |
| US9668233B1 (en) | 2016-07-12 | 2017-05-30 | Xirrus, Inc. | Wireless communication network with distributed device location determination |
| US9998876B2 (en) | 2016-07-27 | 2018-06-12 | At&T Intellectual Property I, L.P. | Inferring user equipment location data based on sector transition |
| EP3322149B1 (en) * | 2016-11-10 | 2023-09-13 | Tata Consultancy Services Limited | Customized map generation with real time messages and locations from concurrent users |
| US10692023B2 (en) * | 2017-05-12 | 2020-06-23 | International Business Machines Corporation | Personal travel assistance system and method for traveling through a transport hub |
| DE102017211712A1 (de) | 2017-07-10 | 2019-01-10 | Audi Ag | Verfahren zur Datengenerierung zum Erzeugen und Aktualisieren einer Topologiekarte für mindestens einen Raum mindestens eines Gebäudes |
| US10999704B2 (en) * | 2017-11-15 | 2021-05-04 | Nokia Solutions And Networks Oy | Method and device for determining space partitioning of environment |
| CN108770057B (zh) * | 2018-03-30 | 2021-05-04 | 博彦科技股份有限公司 | 预定指纹库的确定方法及指纹定位方法、装置、存储介质 |
| CN111094895B (zh) * | 2018-06-29 | 2023-08-22 | 百度时代网络技术(北京)有限公司 | 用于在预构建的视觉地图中进行鲁棒自重新定位的系统和方法 |
| US10932139B2 (en) * | 2018-11-01 | 2021-02-23 | Cisco Technology, Inc. | Precise access point placement and location measurement |
| EP3651032A1 (de) * | 2018-11-06 | 2020-05-13 | Siemens Schweiz AG | Verfahren und vorrichtung zum bereitstellen eines aktualisierten digitalen gebäudemodells |
| CN109495949A (zh) * | 2018-12-20 | 2019-03-19 | 上海快仓智能科技有限公司 | 访问接入点地图构建和访问接入点切换的方法 |
| KR20200138512A (ko) * | 2019-05-30 | 2020-12-10 | 극동대학교 산학협력단 | 스마트 폰 센서만을 이용한 실내위치인식 방법 및 이 방법이 동작되는 스마트폰 단말 |
| EP3754303A1 (en) | 2019-06-19 | 2020-12-23 | HERE Global B.V. | Floor levels of a venue |
| US11087103B2 (en) | 2019-07-02 | 2021-08-10 | Target Brands, Inc. | Adaptive spatial granularity based on system performance |
| US11343244B2 (en) * | 2019-08-02 | 2022-05-24 | Dell Products, Lp | Method and apparatus for multi-factor verification of a computing device location within a preset geographic area |
| US11197262B2 (en) | 2019-08-02 | 2021-12-07 | Dell Products, Lp | Systems and methods of room profiling using wireless local area networks |
| US11409881B2 (en) | 2019-08-12 | 2022-08-09 | Dell Products, Lp | Method and apparatus for wireless signal based location security system |
| US11510047B2 (en) | 2019-08-12 | 2022-11-22 | Dell Products, Lp | Learning based wireless performance adjustment for mobile information handling system |
| US11330551B2 (en) | 2019-08-12 | 2022-05-10 | Dell Products, Lp | Method and apparatus for location aware optimal wireless link selection system |
| US10921130B1 (en) | 2019-09-18 | 2021-02-16 | Here Global B.V. | Method and apparatus for providing an indoor pedestrian origin-destination matrix and flow analytics |
| US11122443B2 (en) * | 2019-09-19 | 2021-09-14 | Cisco Technology, Inc. | Automated access point mapping systems and methods |
| US20210385621A1 (en) * | 2020-06-05 | 2021-12-09 | Where.Place | Method and System for Mapping Persons and Resources |
| CN114061579A (zh) * | 2020-07-30 | 2022-02-18 | 华为技术有限公司 | 室内定位、室内导航的方法、装置、电子设备及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060247849A1 (en) * | 2005-04-27 | 2006-11-02 | Proxemics, Inc. | Wayfinding |
| WO2011072169A2 (en) * | 2009-12-09 | 2011-06-16 | Qualcomm Incorporated | Method and apparatus for reducing instructions in an indoor navigation environment |
| US20120007779A1 (en) * | 2009-03-19 | 2012-01-12 | Martin Klepal | location and tracking system |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005525003A (ja) | 2001-09-05 | 2005-08-18 | ニューベリイ ネットワークス,インコーポレーテッド | 無線ネットワークにおける位置検出および場所追跡 |
| US8019352B2 (en) | 2004-07-23 | 2011-09-13 | Wireless Valley Communications, Inc. | System, method, and apparatus for determining and using the position of wireless devices or infrastructure for wireless network enhancements |
| US7761233B2 (en) * | 2006-06-30 | 2010-07-20 | International Business Machines Corporation | Apparatus and method for measuring the accurate position of moving objects in an indoor environment |
| US7774132B2 (en) | 2006-07-05 | 2010-08-10 | Cisco Technology, Inc. | Providing navigation directions |
| US9448072B2 (en) | 2007-05-31 | 2016-09-20 | Trx Systems, Inc. | System and method for locating, tracking, and/or monitoring the status of personnel and/or assets both indoors and outdoors |
| US9277351B2 (en) | 2007-09-07 | 2016-03-01 | International Business Machines Corporation | Wireless transmission duration and location-based services |
| US8040219B2 (en) | 2008-11-06 | 2011-10-18 | Sony Ericsson Mobile Communications Ab | System and method for in-building location determination |
| US8538688B2 (en) * | 2008-11-18 | 2013-09-17 | Nokia Corporation | User generated pedestrian and indoor shortcut routes for navigation systems |
| US8688139B2 (en) * | 2009-09-10 | 2014-04-01 | Qualcomm Incorporated | Concurrent wireless transmitter mapping and mobile station positioning |
-
2012
- 2012-03-30 US US13/436,600 patent/US8838376B2/en not_active Expired - Fee Related
-
2013
- 2013-03-04 CN CN201380016907.0A patent/CN104204723B/zh not_active Expired - Fee Related
- 2013-03-04 JP JP2015503226A patent/JP2015519592A/ja not_active Ceased
- 2013-03-04 KR KR1020147030261A patent/KR20150001779A/ko not_active Application Discontinuation
- 2013-03-04 WO PCT/US2013/028937 patent/WO2013148077A1/en active Application Filing
- 2013-03-04 EP EP13710941.9A patent/EP2831544A1/en not_active Ceased
-
2017
- 2017-08-31 JP JP2017167077A patent/JP2018023124A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060247849A1 (en) * | 2005-04-27 | 2006-11-02 | Proxemics, Inc. | Wayfinding |
| US20120007779A1 (en) * | 2009-03-19 | 2012-01-12 | Martin Klepal | location and tracking system |
| WO2011072169A2 (en) * | 2009-12-09 | 2011-06-16 | Qualcomm Incorporated | Method and apparatus for reducing instructions in an indoor navigation environment |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018525627A (ja) * | 2015-11-06 | 2018-09-06 | 三菱電機株式会社 | デバイスの位置を位置合わせする方法及びデバイス |
| JP2021056026A (ja) * | 2019-09-27 | 2021-04-08 | サイレックス・テクノロジー株式会社 | 特定装置、特定方法、および、プログラム |
| JP7099716B2 (ja) | 2019-09-27 | 2022-07-12 | サイレックス・テクノロジー株式会社 | 特定装置、特定方法、および、プログラム |
| WO2022113172A1 (ja) * | 2020-11-24 | 2022-06-02 | 三菱電機株式会社 | 位置推定装置、設備機器システム、位置推定方法、および、プログラム |
| JPWO2022113172A1 (ja) * | 2020-11-24 | 2022-06-02 | ||
| JP7399316B2 (ja) | 2020-11-24 | 2023-12-15 | 三菱電機株式会社 | 位置推定装置、設備機器システム、位置推定方法、および、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104204723A (zh) | 2014-12-10 |
| CN104204723B (zh) | 2017-05-10 |
| US20130257657A1 (en) | 2013-10-03 |
| KR20150001779A (ko) | 2015-01-06 |
| US8838376B2 (en) | 2014-09-16 |
| EP2831544A1 (en) | 2015-02-04 |
| JP2018023124A (ja) | 2018-02-08 |
| WO2013148077A1 (en) | 2013-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018023124A (ja) | WiFiベースの屋内ポジショニングのためのマップ情報およびAP位置のマッシュアップ | |
| EP2556706B1 (en) | Radio model updating | |
| KR102355389B1 (ko) | 로케이션-관련 데이터의 선택적 크라우드소싱 | |
| US9494432B2 (en) | Collaborative navigation techniques for mobile devices | |
| JP5980122B2 (ja) | 電磁信号源の位置特定 | |
| JP5778154B2 (ja) | 同時無線送信機マッピングおよび移動局測位 | |
| KR101634757B1 (ko) | 위치 정보를 정렬하기 위해 기준 포인트를 사용하여 디바이스를 위치시키는 방법 | |
| US8781507B2 (en) | Obtaining timing of LTE wireless base stations using aggregated OTDOA assistance data | |
| JP2017503366A (ja) | 無線ヒートマップのパラメータを学習するためにモバイルデバイスを利用すること | |
| US8954089B2 (en) | Positioning LTE wireless base stations using aggregated OTDOA assistance data | |
| TW201341833A (zh) | 用於收到信號預測的存取點量測 | |
| CN107110652B (zh) | 处理空间特征 | |
| JP2012509483A (ja) | 調整されたラウンドトリップ時間測定を使用した無線位置決定 | |
| KR20150130988A (ko) | 로케이션 서비스를 개선하기 위해 3차원 로케이션 정보를 사용하기 위한 시스템 및 방법 | |
| WO2014124106A1 (en) | Terrestrial positioning system calibration | |
| US20140192658A1 (en) | Dynamic selection of positioning system and display map | |
| Retscher et al. | Range validation of UWB and Wi-Fi for integrated indoor positioning | |
| Femminella et al. | A zero-configuration tracking system for first responders networks | |
| Zhao et al. | Wi-Fi assisted multi-sensor personal navigation system for indoor environments | |
| Cho et al. | WARP-P: Wireless Signal Acquisition with Reference Point by using Simplified PDR–System Concept and Performance Assessment | |
| US20150350847A1 (en) | Phone based context engine for positioning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170427 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181126 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20190528 |