KR20150001779A - Wifi 기반 실내 포지셔닝을 위한 ap 위치 및 맵 정보의 매시업 - Google Patents
Wifi 기반 실내 포지셔닝을 위한 ap 위치 및 맵 정보의 매시업 Download PDFInfo
- Publication number
- KR20150001779A KR20150001779A KR1020147030261A KR20147030261A KR20150001779A KR 20150001779 A KR20150001779 A KR 20150001779A KR 1020147030261 A KR1020147030261 A KR 1020147030261A KR 20147030261 A KR20147030261 A KR 20147030261A KR 20150001779 A KR20150001779 A KR 20150001779A
- Authority
- KR
- South Korea
- Prior art keywords
- map
- transmitter
- separate maps
- merging separate
- mobile device
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/005—Map projections or methods associated specifically therewith
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/021—Services related to particular areas, e.g. point of interest [POI] services, venue services or geofences
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/33—Services specially adapted for particular environments, situations or purposes for indoor environments, e.g. buildings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/003—Locating users or terminals or network equipment for network management purposes, e.g. mobility management locating network equipment
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Business, Economics & Management (AREA)
- Mathematical Physics (AREA)
- Automation & Control Theory (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
- Instructional Devices (AREA)
Abstract
평면도를 포함하는 디지털 빌딩 맵 및 복수의 액세스 포인트들의 식별자들을 포함하는 액세스 포인트(AP) 맵들을 포함하는 분리된 맵들의 쌍을 합병하기 위한 장치 및 방법이 제공된다. 일부 실시예들에서, AP 맵에 대해 모바일 디바이스의 제 1 궤적 플롯이 수신되고, 복수의 가설들이 설정되고, 여기서 각각의 가설은 AP 맵과 빌딩 맵 사이의 고유한 전환을 정의한다. 제 1 궤적에 대한 복수의 비용들이 계산될 수 있고, 여기서 제 1 궤적의 각각의 비용은 복수의 가설들 내의 별개의 가설에 대응한다. 다른 가설들에 대해 제 1 궤적이 가장 낮은 비용을 갖는 가설이 선택될 수 있다.
Description
본 출원은 "Mashup of AP location and map information for WiFi based indoor positioning"란 명칭으로 2012년 3월 30일자로 출원된 미국 출원 제 13/436,600 호의 이익을 주장하고, 상기 미국 출원은 인용에 의해 본원에 통합된다.
본 발명은 일반적으로 빌딩 맵 또는 다른 루트 맵과 액세스 포인트(AP) 맵 또는 다른 전송기 맵을 합병하기 위한 장치 및 방법들에 관한 것이며, 더 상세하게는, 최상의 피트(fit)를 찾기 위해 빌딩 맵의 다양한 배향들을 통해, AP 맵에 대해, 궤적들을 적용하는 것에 관한 것이다.
통상적으로, Wi-Fi 네트워크들을 사용하는 실내 포지셔닝 및 라우팅은 빌딩 레이아웃 및 액세스 포인트들(AP들)의 위치들 둘 모두를 도시하는 맵에 기초할 수 있다. Wi-Fi 네트워크들을 사용하는 실내 포지셔닝 및 라우팅에 사용되는 맵들은 2 개의 개별적인 맵들: 액세스 포인트들(AP들)의 위치들을 도시하는 AP 맵 및 벽들, 복도들, 문들, 창문들 등의 위치들을 도시하는 빌딩 맵을 결합함으로써 생성될 수 있다.
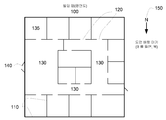
도 1은 벽들(110), 출입구들(120), 복도들(130), 방들(135) 및 출구들(140)을 나타내는 평면도를 갖는 통상적인 빌딩 맵(100)을 도시한다. 일반적으로, 공동의 실내 및/또는 실외 루트들을 포함하는 테마 파크 또는 다른 컴플렉스의 2 차원 맵과 같이, 공통의, 설정 또는 고정된 실내 및/또는 실외 경로들을 포함하는 경로 맵이 사용될 수 있다. 간략히 하기 위해, 빌딩 맵은 후술되는 경로 맵의 일 예로서 사용되고, 실내 및/또는 실외 2 차원 맵 또는 다른 경로 맵의 특정 예이다. 평면도를 포함하는 빌딩 맵의 경로들은 벽들(110), 출입구들(120), 복도들(130), 방들(135) 및 출구들(140)에 의해 규정된다.
도 1은, "N"으로 라벨링된 화살표에 의해 도시된 기본 방향 북(cardinal direction North)을 나타내는 빌딩 맵 배향 마커(150)를 도시한다. 배향 마커(150)는 정보 목적으로만 도시되고, 통상적으로 빌딩 맵(100)과 같은 빌딩 맵들에 제공되지 않는다. 빌딩 맵은, 예를 들면, 장소의 운영자에 의해 제공될 수 있다.
도 2는 액세스 포인트들(AP0 210, AP1 220, AP2 230, AP3 240 및 AP4 250)의 위치들을 도시하는 액세스 포인트 맵(200)을 도시한다. 일반적으로, 라디오 주파수("RF") 맵은 다양한 전송기들의 상대적인 위치들을 도시한다. RF 맵의 스케일 및/또는 배향은 상술된 경로 맵과 연관되지 않는다. 즉, RF 맵의 스케일 및/또는 배향은 경로 맵에 관련하여 알려지지 않는다. 액세스 포인트 맵(200)은 전송기 맵 또는 RF 맵의 한 형태이다. RF 맵은 또한 셀룰러 기지국들, 노드-B들, 블루투쓰 기지국들, 또는 고정 또는 반고정 전송기들을 갖는 전송기들의 타입들의 결합의 전송들로부터 생성될 수 있다.
도 2에서, AP 맵(200)은 다양한 액세스 포인트들의 위치들을 도시하는 RF 맵이다. 도 2는 또한 "N"으로 라벨링된 화살표로 도시된 기본 방향 북을 나타내는 AP 맵 배향 마커(260)를 도시한다. 배향 마커(250)는 정보 목적으로만 도시되고, 통상적으로 AP 맵(200)과 같은 전송기 맵들 또는 AP 맵들에 제공되지 않거나 정확하게 제공되지 않는다.
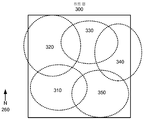
도 3은 시설 전체에 걸쳐 RF 커버리지를 도시하는 히트(heat) 맵(300)을 도시한다. 도 3에 도시된 바와 같이, 점선들에 의해 포함된 영역들은 다양한 액세스 포인트들에 대한 RF 커버리지를 나타낸다. 예를 들면, 도 3에 도시된 바와 같이, RF 커버리지 영역(310)은 AP0(210)에 대응할 수 있다. 마찬가지로, RF 커버리지 영역들(320, 330, 340 및 350)은 AP1(220), AP2(230), AP3(240) 및 AP4(250)에 각각 대응할 수 있다. 일부 예들에서, 히트 맵(300)은 히트 맵(300) 내의 정해진 포인트에서 RF 필드들의 세기들을 나타내도록 컬러 코딩일 수 있다. 일부 예들에서, AP 맵(200) 및/또는 히트 맵(300)은 RSSI(received signal strength indication) 맵 및/또는 RTT(round-trip time) 맵을 포함할 수 있다. 항상 제공되지는 않지만, AP 맵(200) 및/또는 히트 맵(300)은 또한 복수의 액세스 포인트들 중 적어도 하나를 지오-로케이션(geo-location)에 앵커링하는 지오-로케이션 정보를 포함할 수 있다.
AP 맵(200) 및 빌딩 맵(100)은 상이한 조정되지 않은 소스들에서 비롯될 수 있다. 또한, AP 맵(200) 및 빌딩 맵(100)은 동일한 좌표 시스템에 참조되지 않을 수 있다. 일부 예들에서, AP 맵(200) 및 빌딩 맵(100)은 전혀 지리적으로 참조되지 않을 수 있다. 지리적으로 참조된 맵은, 예를 들면, GPS 디바이스로부터 경도-위도 포인트와 같이 좌표 시스템에 의해 규정되는 맵 상의 적어도 하나의 포인트를 제공할 수 있다. 지리적으로 참조된 맵은 또한 기본 방향 및/또는 부가적인 지리적으로 참조된 포인트들의 표시를 포함할 수 있다. 통상적으로, 맵 벤더로부터의 지리적으로 참조된 맵은 어떠한 AP 위치 정보도 포함하지 않는다.
상술된 상황들에서, 빌딩 레이아웃 및 AP 위치들 둘 모두를 도시하는 결합된 맵 상의 AP 위치들의 잘못된 배치 및 불확실성은 직접적으로 추가의 포지션 에러로 변환된다. 따라서, 에러들을 최소화기 위해 빌딩 맵 상의 AP 위치들을 정확히 배치 또는 오버레이할 필요성이 존재한다.
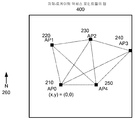
도 4는 하나 이상의 자체-로케이팅 AP들에 의해 제공된 정보를 사용하여 생성된 자체-로케이팅 액세스 포인트들(400)의 맵을 도시한다. 일부 예들에서, 하나 이상의 자체-로케이팅 AP들(SLAP들)은 서로에 관련하여 AP들의 상대적인 위치들에 관련된 정보를 개별적으로 제공할 수도 있다. 예를 들면, 도 4에 도시된 바와 같이, 좌표들 (x,y) = (0, 0)을 갖는 AP0(210)은 AP 좌표 시스템의 원점이고, AP들(220, 230, 240 및 250)의 위치들은 AP(210)에 대해 제공될 수 있다. 다른 상황들에서, 하나 이상의 자체-로케이팅 AP들은 지리적 참조를 제공할 수도 있다. 다른 상황들에서, 어떠한 AP도 지리적 참조를 제공하지 않을 수 있다. 또한, 지리적 참조가 제공되는 경우에서, 그러한 지리적 참조들은 매우 부정확하거나 불확실할 수 있다.
고가인 것에 부가하여, 계산적으로 및 재정적으로 둘 모두에서, 위치 정보를 획득하기 위해 모든 액세스 포인트에 GPS를 장착하는 것은 또한 전력 요건들을 크게 증가시킬 것이다. 또한, GPS 신호들은 실내 액세스 포인트 위치들에서 신뢰할 수 있게 검출 가능하지 않을 수 있다.
따라서, 부가적인 하드웨어를 최소로 사용하여 액세스 포인트를 자체-위치 확인하기 위한 활용 방법들에 관심이 있다. 따라서, AP 맵과 빌딩 맵을 결합하고, 통합된 좌표 시스템을 사용하여 단일 맵 상에서 AP 위치들 및 위치 접속 정보(LCI) 둘 모두를 제공하는 방법들 및 디바이스들이 요구된다. 그러한 합병된 맵은, 예를 들면, 다양한 모바일 디바이스들의 미래의 포지션 결정을 위해 사용될 수 있다.
맵들을 함께 매싱(mashing)하기 위한 장치 및 방법이 개시된다. 아래의 개시 내용은 전송기들의 위치들과 경로들을 매싱 업(mashing up)함으로써 전송기 맵 및 경로 맵을 함께 오버레이하는 것을 설명한다. 통상적인 상황에서, 빌딩 내에 배치된 액세스 포인트들(또는 다른 전송기들)의 상대적인 위치들은, 모바일 디바이스를 휴대하는 한 명 이상의 사용자들에 의해 취해진 루트들을 기록하고, 그러한 기록된 루트들의 개연적(likely) 경로들을 결정하고, 이어서 액세스 포인트 맵과 평면도 사이의 상대적인 스케일링 및 배향 차이들을 추정함으로써 빌딩 맵 또는 평면도(또는 다른 경로 맵)으로 매싱 업 및 고정된다. 이러한 방식으로, 전송기 맵은, 한 명 이상의 사용자들에 의해 취해진 하나 이상의 루트들로부터 상대적인 스케일링 및 배향을 추정함으로써 경로 맵과 매싱 업된다.
일부 양상들에 따라, 분리된 맵들을 합병하기 위한 프로세서 구현 방법이 개시되고, 상기 방법은: 경로 맵을 포함하는 디지털 파일을 수신하는 단계, 복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하는 단계, 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯(trajectory plot)을 수신하는 단계, 전송기 맵과 경로 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들(hypotheses)을 설정하는 단계, 프로세서에서, 복수의 비용들을 계산하는 단계 ― 복수의 비용들의 각각의 비용은 복수의 가설들의 각각의 가설에 기초한 경로 맵을 통한 제 1 궤적 플롯의 비용을 포함함 ― , 및 복수의 비용들 중 최소치에 기초하여 복수의 가설들로부터 하나의 가설을 선택하는 단계를 포함한다.
일부 양상들에 따라, 분리된 맵들을 합병하기 위한 모바일 디바이스가 개시되고, 상기 디바이스는: 루트 맵을 포함하는 디지털 파일을 수신하기 위한 수단, 복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 수단, 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 수단, 전송기 맵과 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 수단, 복수의 비용들을 계산하기 위한 수단 ― 복수의 비용들의 각각의 비용은 복수의 가설들의 각각의 가설에 기초한 루트 맵을 통한 제 1 궤적 플롯의 비용을 포함함 ― , 및 복수의 비용들 중 최소치에 기초하여 복수의 가설들로부터 하나의 가설을 선택하기 위한 수단을 포함한다.
일부 양상들에 따라, 분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스가 개시되고, 여기서 메모리는, 루트 맵을 포함하는 디지털 파일을 수신하기 위한 소프트웨어 명령들, 복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 소프트웨어 명령들, 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 소프트웨어 명령들, 전송기 맵과 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 소프트웨어 명령들, 복수의 비용들을 계산하기 위한 소프트웨어 명령들 ― 복수의 비용들의 각각의 비용은 복수의 가설들의 각각의 가설에 기초한 루트 맵을 통한 제 1 궤적 플롯의 비용을 포함함 ― , 및 복수의 비용들 중 최소치에 기초하여 복수의 가설들로부터 하나의 가설을 선택하기 위한 소프트웨어 명령들을 포함한다.
일부 양상들에 따라, 프로그램 코드가 저장된 컴퓨터-판독 가능 저장 매체가 개시되고, 컴퓨터-판독 가능 저장 매체는: 루트 맵을 포함하는 디지털 파일을 수신하기 위한 프로그램 코드, 복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 프로그램 코드, 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 프로그램 코드, 전송기 맵과 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 프로그램 코드, 프로세서에서, 복수의 비용들을 계산하기 위한 프로그램 코드 ― 복수의 비용들의 각각의 비용은 복수의 가설들의 각각의 가설에 기초한 루트 맵을 통한 제 1 궤적 플롯의 비용을 포함함 ― , 및 복수의 비용들 중 최소치에 기초하여 복수의 가설들로부터 하나의 가설을 선택하기 위한 프로그램 코드를 포함한다.
다른 양상들은, 예시의 방식으로 다양한 양상들을 도시하고 설명하는 하기의 상세한 설명으로부터 이 분야의 당업자들에게 쉽게 명백해질 것임을 이해한다. 도면들 및 상세한 설명은 제한적인 것이 아니라 성질상 예시적인 것으로 간주되어야 한다.
본 발명의 실시예들은 도면들을 참조하여 오직 예시의 방식으로 설명될 것이다.
도 1은 벽들, 출입구들, 복도들, 방들 및 출구들을 나타내는 평면도를 갖는 통상적인 빌딩 맵을 도시한다.
도 2는 시설 내의 다양한 액세스 포인트들의 위치들을 도시하는 액세스 포인트 맵을 도시한다.
도 3은 시설 전체에 걸쳐 RF 커버리지의 영역들을 도시한 히트 맵을 도시한다.
도 4는 하나 이상의 자체-로케이팅 AP들에 의해 제공된 정보를 사용하여 생성될 수 있는 자체-로케이팅 액세스 포인트들의 맵을 도시한다.
도 5는 결합된 맵으로 합병될 2 개의 이질적인 맵들, 즉, AP 맵 및 빌딩 맵을 예시한다.
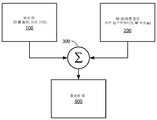
도 6은 합병된 맵(500)을 획득하기 위해 빌딩 맵 및 AP 맵의 결합을 예시한 예시적인 합병 동작을 예시한다.
도 7은 빌딩을 통한 추적된 모바일 디바이스의 궤적을 도시하는 예시적인 궤적 맵을 도시한다.
도 8은 AP 맵 상에 오버레이된 궤적을 도시한다.
도 9는 빌딩 맵 상에 중첩된 예시적인 궤적을 도시한다.
도 10은 AP 위치들, 빌딩 맵으로부터의 빌딩 정보 및 궤적을 도시하는 합병된 맵을 도시한다.
도 11은 빌딩 맵과 AP 맵을 결합하기 위한 예시적인 프로세스의 그림도(600)를 제공한다.
도 12는 개시된 실시예들과 일치하는 방식으로 빌딩 맵과 AP 맵을 결합하기 위한 예시적인 방법을 예시한 흐름도를 도시한다.
도 2는 시설 내의 다양한 액세스 포인트들의 위치들을 도시하는 액세스 포인트 맵을 도시한다.
도 3은 시설 전체에 걸쳐 RF 커버리지의 영역들을 도시한 히트 맵을 도시한다.
도 4는 하나 이상의 자체-로케이팅 AP들에 의해 제공된 정보를 사용하여 생성될 수 있는 자체-로케이팅 액세스 포인트들의 맵을 도시한다.
도 5는 결합된 맵으로 합병될 2 개의 이질적인 맵들, 즉, AP 맵 및 빌딩 맵을 예시한다.
도 6은 합병된 맵(500)을 획득하기 위해 빌딩 맵 및 AP 맵의 결합을 예시한 예시적인 합병 동작을 예시한다.
도 7은 빌딩을 통한 추적된 모바일 디바이스의 궤적을 도시하는 예시적인 궤적 맵을 도시한다.
도 8은 AP 맵 상에 오버레이된 궤적을 도시한다.
도 9는 빌딩 맵 상에 중첩된 예시적인 궤적을 도시한다.
도 10은 AP 위치들, 빌딩 맵으로부터의 빌딩 정보 및 궤적을 도시하는 합병된 맵을 도시한다.
도 11은 빌딩 맵과 AP 맵을 결합하기 위한 예시적인 프로세스의 그림도(600)를 제공한다.
도 12는 개시된 실시예들과 일치하는 방식으로 빌딩 맵과 AP 맵을 결합하기 위한 예시적인 방법을 예시한 흐름도를 도시한다.
첨부된 도면들과 관련하여 아래에서 제시된 상세한 설명은 본 발명의 다양한 양상들의 설명으로서 의도되며, 본 발명이 실시될 수 있는 유일한 양상들을 표현하도록 의도되는 것은 아니다. 본 발명에서 설명되는 각각의 양상은 본 발명의 단지 일례 또는 예시로서 제공되고, 다른 양상들에 비해 반드시 선호되거나 유리한 것으로 해석되어서는 안된다. 상세한 설명은, 본 발명의 철저한 이해를 제공할 목적으로 특정한 세부사항들을 포함한다. 그러나, 이들 특정한 세부사항들 없이도 본 발명이 실시될 수 있음은 이 분야의 당업자들에게 자명할 것이다. 몇몇 예들에서, 본 발명의 개념들을 모호하게 하는 것을 회피하기 위해 잘 알려진 구조들 및 디바이스들은 블록도 형태로 도시된다. 두문자들 및 다른 설명적 용어는 단지 편의 및 명확화를 위해 이용될 수 있고, 본 발명의 범위를 제한하도록 의도되지 않는다.
본 명세서에서 설명되는 포지션 결정 기술들은, 무선 광역 네트워크(WWAN), 무선 로컬 영역 네트워크(WLAN), 무선 개인 영역 네트워크(WPAN) 등과 같은 다양한 무선 통신 네트워크들과 공조하여 구현될 수 있다. 용어 "네트워크" 및 "시스템"은 일부 상황들에서 상호 교환 가능하게 사용된다. WWAN은 코드 분할 다중 액세스(CDMA) 네트워크, 시분할 다중 액세스(TDMA) 네트워크, 주파수 분할 다중 액세스(FDMA) 네트워크, 직교 주파수 분할 다중 액세스(OFDMA) 네트워크, 싱글-캐리어 주파수 분할 다중 액세스(SC-FDMA) 네트워크, 롱 텀 에볼루션(LTE) 등일 수 있다. CDMA 네트워크는 cdma2000, 광대역-CDMA(W-CDMA) 등과 같은 하나 이상의 라디오 액세스 기술들(RAT들)을 구현할 수 있다. cdma2000은 IS-95, IS-2000 및 IS-856 표준들을 포함한다. TDMA 네트워크는 이동 통신용 범용 시스템(GSM), 디지털 어드밴스드 모바일 폰 시스템(D-AMPS) 또는 몇몇 다른 RAT를 구현할 수 있다. GSM 및 W-CDMA는 "제 3 세대 파트너쉽 프로젝트(3GPP)"로 명명된 콘소시엄으로부터의 문서들에서 설명된다. cdma2000은 "제 3세대 파트너쉽 프로젝트 2(3GPP2)"로 명명된 콘소시엄으로부터의 문서들에서 설명된다. 3GPP 및 3GPP2 문서들은 공개적으로 이용가능하다. WLAN은 802.11x 네트워크일 수 있고, WPAN은 블루투스 네트워크, IEEE 802.15x, 또는 몇몇 다른 타입의 네트워크일 수 있다. 이 기술들은 또한 WWAN, WLAN 및/또는 WPAN의 임의의 조합과 공조하여 구현될 수 있다.
위성 포지셔닝 시스템(SPS)은 통상적으로, 전송기들로부터 수신된 신호들에 적어도 부분적으로 기초하여, 엔티티들이 지표상의(on the Earth) 또는 공중에서의(over the Earth) 자신들의 위치를 결정할 수 있도록 포지셔닝된 전송기들의 시스템을 포함한다. 이러한 전송기는 통상적으로 칩들의 세트 번호의 반복하는 의사-랜덤 잡음(PN) 코드로 마킹된 신호를 전송하고, 지상 기반 제어국들, 사용자 장비 및/또는 우주 비행체들 상에 위치될 수 있다. 특정한 예에서, 이러한 전송기들은 지구 궤도 위성 비행체들(SV들) 상에 위치될 수 있다. 예를 들어, 글로벌 포지셔닝 시스템(GPS), Galileo, GLONASS 또는 Compass와 같은 글로벌 내비게이션 위성 시스템(GNSS)의 성상도(constellation) 내의 SV는, 성상도 내의 다른 SV들에 의해 전송된 PN 코드들로부터 (예를 들어, GPS에서와 같이 각각의 위성의 경우 상이한 PN 코드들을 이용하여 또는 GLONASS에서와 같이 상이한 주파수들 상에서 동일한 코드를 이용하여) 구별 가능한 PN 코드로 마킹된 신호를 전송할 수 있다.
특정한 양상들에 따라, 본 명세서에 제시된 기술들은 SPS에 대한 글로벌 시스템들(예를 들어, GNSS)로 제한되지 않는다. 예를 들어, 본 명세서에서 제공되는 기술들은, 일본에서의 QZSS(Quasi-Zenith Satellite System), 인도에서의 IRNSS(Indian Regional Navigational Satellite System), 중국에서의 Beidou 등, 및/또는 하나 이상의 글로벌 및/또는 지역적 내비게이션 위성 시스템들과 연관될 수 있거나 또는 그렇지 않으면 이들과 함께 이용하기 위해 인에이블될 수 있는 다양한 증강 시스템들(예를 들어, 위성 기반 증강 시스템(SBAS))과 같은 다양한 지역적 시스템들에 적용될 수 있거나 또는 그렇지 않으면 이들에서의 이용을 위해 인에이블될 수 있다. 제한이 아닌 예시의 방식으로, SBAS는, 예를 들어, WAAS(Wide Area Augmentation System), EGNOS(European Geostationary Navigation Overlay Service), MSAS(Multi-functional Satellite Augmentation System), GAGAN(GPS Aided Geo Augmented Navigation or GPS and Geo Augmented Navigation system) 등과 같이, 무결성 정보, 차분 정정들 등을 제공하는 증강 시스템(들)을 포함할 수 있다. 따라서, 본 명세서에서 사용되는 바와 같이, SPS는 하나 이상의 글로벌 및/또는 지역적 내비게이션 위성 시스템들 및/또는 증강 시스템들의 임의의 조합을 포함할 수 있고, SPS 신호들은 이러한 하나 이상의 SPS와 연관된 SPS 신호, SPS-유사 신호 및/또는 다른 신호들을 포함할 수 있다.
본 명세서에서 사용되는 바와 같이, 모바일 디바이스는 때때로, 이동국(MS) 또는 사용자 장비(UE), 이를테면, 셀룰러 폰, 모바일 폰 또는 다른 무선 통신 디바이스, 개인 통신 시스템(PCS) 디바이스, 개인 내비게이션 디바이스(PND), 개인 정보 관리자(PIM), 개인 휴대 정보 단말(PDA), 랩탑, 또는 무선 통신 및/또는 내비게이션 신호들을 수신할 수 있는 다른 적절한 모바일 디바이스로 지칭된다. 용어 "이동국"은 또한, 디바이스에서 또는 PND에서 위성 신호 수신이 발생하든지, 보조 데이터 수신이 발생하든지, 및/또는 포지션-관련 프로세싱이 발생하든지와 무관하게, 가령, 단거리 무선, 적외선, 유선 접속 또는 다른 접속에 의해 개인 내비게이션 디바이스(PND)와 통신하는 디바이스들을 포함하도록 의도된다. 또한, "이동국"은, 디바이스에서, 서버에서, 또는 네트워크와 연관된 다른 디바이스에서 위성 신호 수신이 발생하든지, 보조 데이터 수신이 발생하든지, 및/또는 포지션-관련 프로세싱이 발생하든지와 무관하게, 가령, 인터넷, WiFi 또는 다른 네트워크를 통해 서버와 통신할 수 있는, 무선 통신 디바이스들, 컴퓨터들, 랩탑들 등을 포함하는 모든 디바이스들을 포함하도록 의도된다. 상기한 것들의 임의의 동작 가능한 조합이 또한 모바일 디바이스로 고려된다.
도 5는 결합된 맵으로 합병될 2 개의 이질적인 맵들(100 및 200)을 예시한다. 도 5에 도시된 바와 같이, 빌딩 맵(100)은 AP 맵(200)과 상이한 스케일 및 배향을 갖는다. 또한, 도 5에 도시된 바와 같이, AP 맵(200)에서 기준 방향 "N"(260)의 표시는, (정해진 배향 "N"(150)을 사용하여) 빌딩 맵(100) 상에 정확하게 중첩되면, 하향으로 지시될 것이고, 반면에 AP 맵(200)에서 "N"은 상향으로 지시된다.
빌딩 맵 및 AP 맵이 동일한 소스로부터 비롯하면(즉, 동일한 좌표 시스템에 참조되면), 그들을 동일한 좌표 프레임 상에 중첩하고, 다양한 제어 포인트들을 사용하여 그들을 절대 좌표 프레임으로 변환하는 것은 비교적 용이하다. 그러나, 더 자주 빌딩 맵 및 AP 맵은 상이한 소스들로부터 비롯한다. 또한, 상대적인 AP 위치들이 이용 불가하고 추정되어야 하는 것이 가능하다. 이러한 추정된 위치들은, 이러한 2 개의 소스들로부터의 정보가 하나의 공통의 이용 가능한 프레임에 제공될 수 있도록 매싱 업되거나 그렇지 않다면 결합 또는 합병될 수 있다.
맵들의 이러한 합병을 달성하는 하나의 방법은 각각의 소스의 정보를 절대적인 프레임(예를 들면, WGS-84)으로 변환하는 것이다. WGS 84는 글로벌 포지셔닝 시스템에 의해 사용되는 참조 좌표 시스템이다. 그러나, 이러한 변환은 2 개의 개별적인 지리적 참조 동작들(하나는 AP 위치들에 대한 것이고, 다른 것은 빌딩 맵 내의 접속 정보에 대한 것임)을 수반한다. 도입된 결과적인 총 에러 또는 불확실성은 각각의 맵의 불확실성 또는 개별적인 에러들의 합산이다.
도 6은 합병된 맵(500)을 획득하기 위해 빌딩 맵(100) 및 AP 맵(200)의 결합을 예시한 예시적인 합병 동작(300)을 도시한다. 일부 실시예들에서, 합병된 맵(500)을 획득하기 위해 맵들을 결합하기 위한 매싱 알고리즘은 빌딩 맵(100) 및 AP 맵(200)의 스케일들, 상대적인 배향들 및 기준 방향들에 관련된 제한된 정보로 또는 어떠한 정보도 없이 동작할 수 있다.
예를 들면, AP 맵(200)으로부터 AP 위치 정보 및 빌딩 맵(100)으로부터의 위치 접속 정보(LCI)는 실내 포지셔닝을 위해 사용될 수 있다. 위치 접속 정보는, 통상적으로 예시적인 빌딩 맵(100)과 같은 빌딩 맵들 상에 제공되는 복도들(130), 벽들(110), 방들(135), 문들(120), 출구들(140) 등에 관한 정보에 관련된다. 예를 들면, AP 위치 정보는 RSSI/RTT 히트 맵들을 생성하는데 사용될 수 있고, LCI 정보는 포지션 엔진(PE)의 성능을 개선하도록 벽들 및 문들의 존재 또는 부재를 이용하기 위해 PF(particle filter) 내에서 사용될 수 있다. 당분야에 잘 알려진 파티클 필터들은 빌딩 맵(100)에 도시된 빌딩의 분포 및 레이아웃을 추정하는데 사용될 수 있다.
본 발명의 실시예들은 AP 위치들 또는 AP 맵들(200)과 빌딩 맵들(100)을 합병한다. 예를 들면, 평면도를 포함하는 빌딩 맵(100)은 위치 접속 정보(LCI) 그리드로 변환될 수 있다. LCI 그리드는 한 세트의 동일하게 이격된 그리드 포인트들 및 이웃하는 그리드 포인트들의 쌍들 사이의 접속 정보를 포함할 수 있다. (예를 들면, 복도, 출입구 또는 방 내의) 개방 이웃들의 노드들이 접속되고, 반면에 (예를 들면, 문들 및 벽들에 의해) 물리적으로 분리된 노드들은 접속되지 않는다. 일부 실시예들에서, LCI 그리드는 빌딩 맵(100)에 도시된 빌딩의 전체 층을 커버할 수 있다. LCI 그리드 표현에서, 노드는 빌딩 맵(100) 상에 포인트를 마킹할 수 있고, 직접적으로 접속된 이웃 노드들은 에지 또는 세그먼트로 또한 불릴 수 있는 링크에 의해 접속될 수 있다. LCI 그리드 표현에서, 제 1 노드 및 제 2 노드는, 사람이 제 1 노드 위치로부터 제 2 노드 위치(또는 그 역도 가능함)로 걷을 수 있다면, 제 3 노드를 방문하지 않고 직접적으로 접속된다. 노드들에 관련된 접속 정보를 사용하여 빌딩 맵(100)을 한 세트의 이산 노드들을 포함하는 맵으로 변환하는 프로세스는 맵 양자화(quantization)의 형태로 보여질 수 있다.
일부 실시예들에서, 후술되는 예시적인 기술들 중 하나 이상의 사용을 통하는 것을 포함하여 다양한 방법들로 획득될 수 있는 실제 사용자 궤적 플롯들은, 궤적을 사용하여 획득된 각각의 결합된 맵(500)과 연관된 비용을 계산하는데 사용될 수 있다. 각각의 결합된 맵(500)은 2 개의 맵들의 상이한 상대적인 배향을 사용하여 빌딩 맵(100) 및 AP 맵(200)을 결합할 수 있다. LCI 그리드는 이러한 비용 분석을 수행하고 이로써 AP 맵과 빌딩 맵의 최적의 상대적인 배향을 결정하는데 사용될 수 있다.
일부 실시예들에서, 상대적인 AP 위치들의 추정은 RTT(round-trip time) 및/또는 RSSI(received signal strength indication) 측정들 및/또는 다른 잘 알려진 SLAP(Self-Locating Access Point) 기술들과 같은 잘 알려진 기술들을 사용하여 달성될 수 있다. 총 n 개의 액세스 포인트들이 존재한다고 가정하라. 각각의 액세스 포인트는 다른 액세스 포인트들로부터 신호들을 수신하고, 로컬 기준 프레임에 관련하여 소스 액세스 포인트의 왕복 시간(RTT)을 계산할 수 있다. 로컬 기준 프레임은 AP 네트워크에 로컬인 프레임을 포함한다. RTT 측정치들의 세트가 수집되어, 미지의 AP 위치들을 추정하는데 사용되는 데이터를 형성한다. 예를 들면, AP들 중 하나는 로컬 기준 프레임의 원점으로서 사용될 수 있고, 다른 AP들의 포지션들은 원점에 대해 결정될 수 있다. RSSI(received signal strength indication) 측정치들은 또한 RTT 측정치들 대신에 또는 이에 부가하여 사용될 수 있다.
일부 예들에서, 히트 맵들 또는 다른 RF 맵들은 다양한 모델들을 사용하여, 예를 들면, RSSI 사용하거나 및/또는 RTT 기반 기술들을 사용하는 LOS(Line-of-Sight) 거리 관련 모델들을 사용하여 생성될 수 있다. 예를 들면, AP 위치 정보는 RSSI/RTT 히트 맵들을 생성하는데 사용될 수 있다. RSSI-기반 위치 기술들에서, AP들에 의해 서빙되는 영역은, 예를 들면, 일정한 그리드 간격을 갖는 2 차원 래스터(raster) 어레이로서 모델링될 수 있고, 여기서 그리드 래스터 포인트는 히트 맵(300) 상의 위치에 대응할 수 있다. 각각의 래스터 포인트는 AP 시그니처들을 사용하여 AP들에 교차-참조된 RSSI 값들의 벡터로서 표현될 수 있다. 예측된 신호 데이터베이스는 RSSI들의 완전한 래스터 어레이를 사용하여 생성될 수 있고, 예측된 신호 데이터베이스는 AP에 의해 측정된 수신된 신호 세기와 예측된 신호 데이터베이스 벡터들을 비교하기 위해 RSSI-기반 PE와 같은 포지션 엔진(PE)에 의해 사용될 수 있고, 최상은 매치는 가장 가능성이 있는 AP 위치의 좌표들(x, y)을 결정하는 것이다. 부분적인 RTT 정보는 또한 교정(calibration)의 정확성을 개선하기 위해 추정 절차에 통합될 수 있다.
적어도 3 개의 액세스 포인트들이 이용 가능하면, 모든 액세스 포인트들의 상대적인 위치들이 추정될 수 있다. 따라서, 상대적인 액세스 포인트 위치들은, 빌딩 맵(100)에 대해 전체 AP 프레임워크의 미지의 변환 및 회전을 제외하고 계산될 수 있다. 부가적인 절대적인 위치 정보는 이러한 변환 및 회전의 추정을 허용한다. 하나 또는 2 개의 액세스 포인트들의 부가적인 절대적인 위치 정보를 통해, 모든 액세스 포인트들에 대한 절대적인 위치 및 배향 추정치들이 계산될 수 있고, 이러한 정보는 결합된 맵(500)을 생성하는데 사용될 수 있다.
우리가 평면 내에 n 개의 액세스 포인트들의 세트를 갖고, 각각의 액세스 포인트가 미지의 위치 {xi, yi}(여기서 i=1, 2...n)을 갖는다고 가정하라. 각각의 액세스 포인트는 다른 액세스 포인트들로부터의 RTT를 계산한다. 액세스 포인트(j)로부터 액세스 포인트(i)에서 측정된 RTT는 rij로 표기된다.
파라미터 벡터는 다음과 같이 정의될 수 있다.

또한, RTT 측정치들은 추정 에러들을 포함하는 것으로 가정된다.
이러한 측정치들은 벡터 X로 수집된다.
여기서,  는 무잡음 측정 벡터이고, E는 알려진 전력 분포 함수(pdf)를 갖는 랜덤 벡터이다. 측정치들 X가 주어지면, α가 추정될 수 있고, 다양한 AP들이 상대적인 위치들이 획득될 수 있다.
는 무잡음 측정 벡터이고, E는 알려진 전력 분포 함수(pdf)를 갖는 랜덤 벡터이다. 측정치들 X가 주어지면, α가 추정될 수 있고, 다양한 AP들이 상대적인 위치들이 획득될 수 있다.
앞서 설명된 바와 같이, α는 로컬 기준 좌표 프레임에서 AP들의 상대적인 액세스 포인트 포지션들을 나타낸다. AP 위치들을 사용하여, LCI 특성들에 기초한 대응하는 히트 맵들이 생성될 수 있다. 히트 맵들은 LCI 그리드 내의 그리드 포인트들의 접속, 및/또는 복도들(130), 벽들(110), 문들(120), 출구들(140) 등과 같은 빌딩 피처들의 존재 또는 부재에 관련된 정보에 기초할 수 있다. LCI 특성들이 이용 불가한 경우들에서, 히트 맵들(300)은 RSSI 또는 RTT에 관련된 LOS 거리와 같이 매우 일반적인 모델들을 사용하여 생성될 수 있다.
도 7은 빌딩을 통해 추적된 모바일 디바이스의 궤적(410)을 도시한 예시적인 궤적 맵(400)을 도시한다. 일부 실시예들에서, 궤적(410)에 관련된 동적 궤적 정보는 빌딩 맵(100)에 의해 설명된 실제 물리적인 빌딩에서 모바일 디바이스 위치 정보를 수집함으로써 획득될 수 있다.
일부 실시예들에서, AP0(210), AP1(220),...AP4(250)와 같은 AP들은, 사용자들이 빌딩을 통해 이동할 때 사용자들의 위치들에 관련된 정보를 수집할 수 있다. 예를 들면, 사용자가 빌딩을 통해 걷고 있을 때, 사용자의 폰/모바일 디바이스는 빌딩을 통한 사용자의 이동 동안에 여러 번 그리고 여러 포인트들에서 AP0(210), AP1(220),...AP4(250) 중 하나 이상을 액세스하거나 액세스하려고 시도할 수 있다. AP들과 상호 작용하는 각각의 별개의 셀 폰 또는 모바일 디바이스에 대한 고유한 ID가 생성될 수 있고, 빌딩을 통한 모바일 디바이스의 위치는 여러 번 추적될 수 있다. 예를 들면, RSSI 정보는 하나 이상의 AP들에 대해 모바일 디바이스의 위치를 결정하는데 사용될 수 있다.
일부 실시예들에서, 모바일 디바이스들이 GPS 정보와 같은 위치 정보, 또는 모바일 디바이스가 위치 추정을 획득하도록 허용하는 관성 센서들로부터의 정보에 액세스할 수 있는 경우에, AP들은 위치 정보를 요청하거나 모바일 디바이스들은 위치 정보를 AP로 전송하거나 위치 정보를 AP들로 전송하도록 지시받을 수 있다. 예를 들면, 직장 환경에서, 위치를 AP들에 보고하는 애플리케이션이 사용자의 모바일 디바이스에 설치될 수 있다. 일부 실시예들에서, AP들에 보고된 위치 정보는 또한 정보가 GPS, 관성 센서들 등을 사용하여 획득되었는지와 같은 위치 정보의 소스를 식별하는 필드를 포함할 수 있다.
앞서 결정 및/또는 보고된 모바일 디바이스 위치들은 빌딩 내에서 이동하는 사람들의 궤적들을 계산하는데 사용될 수 있다. 예를 들면, 일부 규정된 시간적인 윈도우 내에서 모바일 디바이스와 연관된 한 세트의 위치들은 궤적으로서 고려될 수 있다. 일부 실시예들에서, 성능을 개선하기 위해 몇몇의 모바일 디바이스들을 축적하는 다수의 궤적들이 수집될 수 있다. 다수의 궤적들은 시간에 걸쳐 동일한 모바일 디바이스로부터의 것이거나, 동시에 또는 시간에 걸쳐 다수의 모바일 디바이스들로부터의 것일 수 있다. 일부 실시예들에서, 통계적으로 상당한 수의 궤적들이 추정될 수 있고, 이러한 궤적들 중 하나 이상은 더 먼 거리를 커버하거나 및/또는 빌딩 내의 다수의 턴들(turns)을 포함하는 다양한 궤적들을 포함할 수 있다.
일부 실시예들에서, 궤적들은 예시적인 AP0(210), AP1(220)...AP4(250)에 연결된 하나 이상의 컴퓨팅 디바이스들에 의해 계산될 수 있다. 일부 실시예들에서, AP0(210), AP1(220)...AP4(250)는 하나 이상의 모바일 디바이스들과 연관된 타임-스탬프 위치 정보를 하나 이상의 연결된 컴퓨팅 디바이스들로 전송할 수 있고, 컴퓨팅 디바이스들은 위치 관련 정보 데이터를 데이터베이스에 저장하고, 위치 정보로부터 궤적 정보를 계산할 수 있다. 통계 기술들은 최소로 변동하는 유사한 궤적들을 상관시키는데 사용될 수 있고, 최소 제곱 추정과 같은 기술들은 한 세트의 비-오버랩핑 또는 별개의 궤적들을 결정하는데 사용될 수 있다. 일부 실시예들에서, 각각의 별개의 식별된 궤적은 고유한 궤적 식별자와 연관될 수 있다.
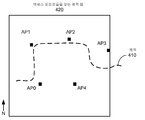
도 8은 AP 맵(200) 상에 오버레이된 궤적(410)을 도시한다. 궤적(410)이 예시적인 AP들(AP0(210), AP1(220)...AP4(250))에 의해 결정되었기 때문에, AP 맵(200) 및/또는 히트 맵(300) 상의 오버레이 궤적(410)이 달성될 수 있다. 예를 들면, 일정 기간 동안에 AP들에 대해 모바일 디바이스의 위치들은 AP 맵(200) 및/또는 히트 맵(300) 상에 플로팅 및/또는 오버레이될 수 있다. 도 8에 도시된 바와 같이, 궤적(410) 및 AP 맵(200) 및/또는 히트 맵(300)은, AP 위치들 및 궤적(410)을 도시하는 합병된 맵(420)을 획득하도록 합병된다. 일부 실시예들에서, 파티클 필터 또는 임의의 다른 포지셔닝 엔진은 사용자 궤적(410)을 획득하고 궤적을 AP 맵(200) 및/또는 히트 맵(300) 상에 오버레이하는데 사용될 수 있다.
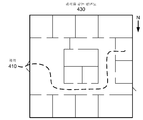
도 9는 빌딩 맵(100) 상에 중첩된 예시적인 궤적(410)을 도시한다. 일부 실시예들에서, 하나 이상의 궤적들(410)의 계산 후에, 궤적들(410) 중 하나가 선택되어, AP 맵(200) 및/또는 히트 맵(300)이 빌딩 맵(100)과 어떻게 합병될 수 있는지를 결정하는데 사용될 수 있다. 예를 들면, 하나 이상의 궤적들(410)은 빌딩 맵(100) 내의 경로들과 궤적(410)을 상관시키기 위해 빌딩 맵 정보를 사용함으로써 빌딩 맵(100) 상에 중첩될 수 있다.
일 실시예에서, 평면도를 포함할 수 있는 빌딩 맵(100)은 이웃하는 그리드 포인트들의 쌍 사이에 접속 정보를 갖는 동일하게 이격된 그리드 포인트들로 구성된 LCI 그리드의 형태를 취할 수 있다. 개방 이웃들의 노드들이 접속되고, 반면에 물리적으로 분리된 노드들이 접속되지 않는다. LCI 그리드 표현에서, 노드는 빌딩 맵(100) 상에 포인트를 마킹할 수 있고, 직접적으로 접속하는 이웃 노드들은 링크 또는 에지에 의해 접속될 수 있다. LCI 그리드 표현에서, 제 1 노드 및 제 2 노드는, 사람이 제 1 노드 위치로부터 제 2 노드 위치(또는 그 역도 가능함)로 걸을 수 있다면, 제 3 노드를 방문하지 않고 직접적으로 접속된다.
일부 실시예들에서, 하나 이상의 궤적들(410)이 선택되어, 빌딩 맵(100)에서 개연적 경로들 또는 빌딩 맵(100)에서 LCI 그리드와 상관될 수 있다. 일부 실시예들에서, 빌딩 맵(100) 내의 하나 이상의 경로들과의 상관을 위해 선택된 궤적(410)은 길 수 있거나 및/또는 몇몇의 턴들을 포함할 수 있는 복합 궤적일 수 있다. 복합 궤적을 선택하는 것은 상관을 사용하여 획득된 개연적 경로들의 결과들에서 신뢰 레벨을 증가시킬 수 있다.
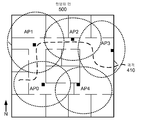
도 10은 AP 위치들 둘 모두, AP 히트 맵들, 빌딩 맵(110)으로부터의 빌딩 정보 및 궤적(410)을 도시하는 합병된 맵(500)을 도시한다. 일부 실시예들에서, 합병된 맵(500)은 빌딩 맵(100) 상의 개연적 경로들과 하나 이상의 궤적들(410) 사이의 일련의 상관들을 사용하여 획득될 수 있다.
일 실시예에서, 빌딩 맵(100) 내의 개연적 경로들은 가능성 히트 맵 알고리즘을 이전에 수집된 사용자/모바일 디바이스 위치 데이터에 적용함으로써 획득될 수 있다. 가능성 히트 맵 알고리즘은 이전에 수집된 사용자/모바일 디바이스 위치 데이터에 기초하여 빌딩 맵(100) 내의 높은 가능성의 이동 영역들을 식별한다. 높은 가능성의 이동 영역들은 아주 많이 걷는 복도들 및 번잡한 개방 공간들을 포함할 수 있다. 통상적으로, 높은 가능성의 이동 영역들은 매우 더 많은 수의 모바일 디바이스 데이터 포인트들과 연관되는데, 왜냐하면 높은 가능성의 이동 영역들이 개별적인 사무실들과 같이 통행이 더 적은 영역들에 비해 더 많은 통행을 수용할 수 있다.
일부 실시예들에서, 프로세서는 선택된 모바일 디바이스 궤적(410)과 높은 가능성의 가능한 경로들을 상관시킬 수 있고, 선택된 궤적(410)에 대해 가장 큰 상관을 갖는 높은 가능성의 경로는 궤적(410)에 대한 매치로서 선택될 수 있다.
다른 실시예들에서, 이미지 매칭 또는 맵 매칭 알고리즘들은 이동 영역 히트 맵 대신에 빌딩 맵(100) 내의 하나 이상의 경로들과 궤적(410)을 상관시키기 위해 사용될 수 있다. 예를 들면, 궤적(410)은 가능한 한 세트의 경로들 상에 중첩될 수 있고, 경로들 중 하나는 궤적(410)에 대응하는 것으로 선택될 수 있다. 더 많이 불균일한 궤적(즉, 많은 턴들)은 더 적은 불확실성으로 빌딩 맵 상에 오버레이될 수 있다.
일부 실시예들에서, 연관된 비용 함수는, LCI 정보를 사용하여 궤적(410)을 빌딩 맵(100) 내의 한 세트의 가능한 경로들 중 하나에 맵핑하는 각각의 맵핑과 연관될 수 있다. 궤적(410)에 매칭되는 빌딩 맵(100) 내의 한 세트의 가능한 경로들 내의 각각의 경로는, 한편으로는 AP 맵(200)과 히트 맵 사이 및 다른 한편으로는 AP 맵(200)과 빌딩 맵(100) 사이의 상대적인 배향 및 스케일에 관한 가설을 나타낸다. 매치가 발견되면, 빌딩 맵(100) 및 AP 맵(200) 및/또는 히트 맵(300)의 합병은 가설과 연관된 스케일 및 배향을 사용함으로써 달성될 수 있다.
일부 실시예들에서, 고비용은, 궤적(410)이 빌딩 맵(100) 내의 벽(110) 또는 다른 장애물과 접할 때의 맵핑과 연관될 수 있다. 일부 실시예들에서, 비용들은 경로의 길이, 경로가 취하는 턴들의 수 등과 연관될 수 있다. 일부 실시예들에서, 비용 함수를 사용하여 획득된 가장 낮은 비용 맵핑은 빌딩 맵(100) 내의 경로로의 궤적(410)의 최적의 맵핑으로서 선택될 수 있다. 따라서, 빌딩 맵(100) 및 AP 맵(200) 및/또는 히트 맵 사이의 스케일 및 상대적인 배향이 이제 결정될 수 있고, 빌딩 맵(100) 상의 AP들(AP0(210), AP1(220)...AP4(250))의 절대적인 위치들이 또한 결정될 수 있다.
일 실시예에서, AP들 중 하나는 선택된 가설과 연관된 스케일 및 상대적인 배향 정보에 기초하여 빌딩 맵(100) 상에 배치될 수 있고, 서로에 관련하여 AP들의 상대적인 위치들이 알려지기 때문에, 다른 AP들의 위치가 계산될 수 있다.
일부 실시예들에서, 맵핑 함수는 빌딩 경로 내의 가장 긴 에지와 궤적(410) 내의 가장 긴 직선 에지를 정렬함으로써 개시되고, 궤적(410)이 빌딩 맵(100) 상의 경로와 매칭하는지를 결정할 때, 궤적(410) 내의 가장 긴 에지에 대한 세그먼트들을 빌딩 맵(100) 내의 경로에 대한 대응하는 세그먼트들에 부가함으로써 비용들 및 가설들을 평가할 수 있다.
도 11은 빌딩 맵(100)과 AP 맵(200)을 결합하기 위한 예시적인 프로세스의 그림도(600)를 제공한다. 아이콘들의 바로 좌측의 블록과 연관된 차트의 우측의 아이콘들은 연관된 블록 내의 프로세스를 그림으로 설명한다.
도 6에 도시된 바와 같이, 프로세스는 입력들로서 예시적인 빌딩 맵(100) 및 AP 맵(200)과 같은 2 개의 분리된 디지털 맵들을 갖고 시작될 수 있다. 또한, 빌딩 맵(100)은 LCI 그리드로 변환될 수 있거나 및/또는 위치 접속 정보는 빌딩 맵(100)(도시되지 않음)으로부터 획득될 수 있다.
일부 실시예들에서, AP들 사이의 상대적인 위치들은 RTT와 같이, 상술된 다양한 기술들을 사용하여 결정될 수 있다.
블록(610)에서, 사용자들/모바일 디바이스들의 위치들에 관련된 데이터가 수집될 수 있고, 하나 이상의 궤적들이 AP들의 위치들에 대해 결정될 수 있다.
블록(620)에서, 궤적은 블록(610)에서 결정된 궤적들 중에서 선택될 수 있고, 빌딩 맵(100) 내의 경로로의 궤적의 최상의 피트는 비용 함수를 사용하여 결정될 수 있다. 예를 들면, 빌딩 경로로의 궤적의 가장 낮은 비용의 맵핑은 최상의 피트로서 선택될 수 있다. 본 명세서에서 사용된 바와 같이, 용어 "최상의 피트"는 가장 낮은 비용의 궤적에 관련된다. 가장 낮은 비용 궤적은 빌딩 경로에 대한 최적의 매치를 제공한다.
또한, 블록(620)에서, 가장 낮은 비용의 궤적은, AP 맵(200)을 스케일링 및 회전하는데 사용될 수 있는, 빌딩 맵(100)과 AP 맵(200) 사이의 상대적인 배향 및 스케일을 제공하는 가설과 연관된다.
블록(630)에서, AP 맵(200) 및 빌딩 맵(100)은 스케일 및 상대적인 배향 정보를 사용하여 함께 결합 또는 매싱될 수 있고, AP들은 빌딩 및 AP 위치 정보 둘 모두를 도시하는 결합된 맵 사에 로케이팅될 수 있다.
도 12는 개시된 실시예들과 일치하는 방식으로 빌딩 맵(100)과 AP 맵(200)을 결합하기 위한 예시적인 방법(700)을 예시한 흐름도를 도시한다. 일부 실시예들에서, 방법(700)은 AP 또는 지능형 AP들을 포함하는 한 세트의 네트워킹 AP들, 및/또는 모바일 디바이스들에 연결될 수 있는 하나 이상의 컴퓨팅 디바이스들에 의해 수행될 수 있다. 일부 실시예들에서, 방법(700)은, 다양한 계산들을 수행하거나 및/또는 다른 애플리케이션 프로그램 코드를 실행할 수도 있는 지능형 AP들에 의해 수행될 수 있다. 일반적으로, 방법(700)은 AP들, 지능형 AP들, 모바일 디바이스들 및 컴퓨팅 디바이스들의 일부 조합에 의해 수행될 수 있다.
단계(710)에서, 평면도를 포함할 수 있는 빌딩 맵(100)과 같은 빌딩 맵을 포함하는 디지털 파일이 수신 또는 액세스될 수 있다.
다음에, 단계(720)에서, AP 맵(200)과 같은 AP 맵을 포함하는 디지털 파일이 수신 또는 액세스될 수 있다. AP 맵(200)은 복수의 AP들에 대한 식별자들을 포함할 수 있다.
단계(730)에서, AP 맵에 대해 모바일 디바이스의 제 1 궤적이 수신될 수 있다. 일부 실시예들에서, 모바일 디바이스들의 위치들이 추적될 수 있고, 모바일 디바이스의 제 1 궤적을 결정하기 위해 그 정보가 사용될 수 있다. 일부 실시예들에서, 제 1 궤적은, 예를 들면, 방법(700)을 수행하는 컴퓨팅 디바이스에 의해 전송 또는 액세스될 수 있다.
다음에, 단계(740)에서, 복수의 가설들이 설정될 수 있고, 여기서 각각의 가설은 AP 맵과 빌딩 맵 사이의 고유한 변환을 정의한다. 예를 들면, 일 실시예에서, 가설은 예시적인 빌딩 맵(100)과 AP 맵(200) 사이의 스케일 및 상대적인 배향들을 직접적으로 지정할 수 있다. 다른 실시예에서, 가설은, 예를 들면, 예시적인 AP 맵(200) 상의 궤적(또는 한 세트의 포인트들)과 예시적인 빌딩 맵(100) 상의 경로(또는 한 세트의 포인트들)를 연관시킴으로써 스케일 및 상대적인 배향을 암시적으로 지정할 수 있다.
일부 실시예들에서, 단계(750)에서, 제 1 궤적에 대한 복수의 비용들이 계산될 수 있고, 여기서 제 1 궤적의 각각의 비용은 복수의 가설들 내의 별개의 가설에 대응한다. 예를 들면, 프로세서는 복수의 비용들을 계산할 수 있고, 여기서 복수의 비용들의 각각의 비용은 복수의 가설들 중 하나인 대응하는 가설에 기초하는 빌딩 맵을 통한 제 1 궤적의 비용을 포함한다.
단계(760)에서, 제 1 궤적이 다른 가설들에 대해 가장 낮은 비용을 갖는다는 가설이 선택될 수 있다. 일부 실시예들에서, 몇몇의 가설들이 동일한 비용을 갖는 경우에, 가설들 중 임의의 하나의 가설이 선택될 수 있다. 각각의 가설이 예시적인 빌딩 맵(100) 및 AP 맵(200)의 스케일 및 상대적인 배향을 암시적으로 지정하기 때문에, 선택된 가설과 연관된 스케일 및 상대적인 배향은 AP 맵(200)을 회전 및 스케일링하고, AP 맵(200) 내의 AP들을 빌딩 맵(100) 상에 배치하는데 사용될 수 있어서, 이로써 평면도 및 평면도 상의 AP 위치들 둘 모두를 도시하는 결합된 맵을 산출한다.
본 명세서에서 설명되는 방법들은 애플리케이션에 따라 다양한 수단으로 구현될 수 있다. 예를 들어, 이 방법들은 하드웨어, 펌웨어, 소프트웨어 또는 이들의 임의의 조합으로 구현될 수 있다. 하드웨어 구현의 경우, 프로세싱 유닛들은 하나 이상의 주문형 집적 회로들(ASIC들), 디지털 신호 프로세서들(DSP들), 디지털 신호 프로세싱 디바이스들(DSPD들), 프로그래머블 로직 디바이스들(PLD들), 필드 프로그래머블 게이트 어레이들(FPGA들), 프로세서들, 제어기들, 마이크로-제어기들, 마이크로프로세서들, 전자 디바이스들, 본 명세서에서 설명된 기능들을 수행하도록 설계되는 다른 전자 유닛들 또는 이들의 조합 내에서 구현될 수 있다.
펌웨어 및/또는 소프트웨어 구현의 경우, 방법들은, 본 명세서에서 설명된 기능들을 수행하는 모듈들(예를 들어, 절차들, 함수들 등)로 구현될 수 있다. 명령들을 유형적으로(tangibly) 구현하는 임의의 머신-판독가능 매체가, 본 명세서에서 설명된 방법들의 구현시에 이용될 수 있다. 예를 들어, 소프트웨어 코드들은 메모리에 저장되고 프로세서 유닛에 의해 실행될 수 있다. 메모리는 프로세서 유닛 내에서 또는 프로세서 유닛 외부에서 구현될 수 있다. 본 명세서에서 사용되는 바와 같이, 용어 "메모리"는 임의의 타입의 장기, 단기, 휘발성, 비휘발성 또는 다른 메모리를 지칭하고, 메모리의 임의의 특정한 타입 또는 메모리들의 수, 또는 메모리가 저장되는 매체들의 타입에 제한되지 않는다.
펌웨어 및/또는 소프트웨어로 구현되면, 기능들은 컴퓨터 판독가능 매체 상에 하나 이상의 명령들 또는 코드로서 저장될 수 있다. 예시들은, 데이터 구조로 인코딩된 컴퓨터 판독가능 매체들 및 컴퓨터 프로그램으로 인코딩된 컴퓨터 판독가능 매체들을 포함한다. 컴퓨터 판독가능 매체들은 물리적 컴퓨터 저장 매체들을 포함한다. 저장 매체는, 컴퓨터에 의해 액세스될 수 있는 임의의 이용가능한 매체일 수 있다. 제한이 아닌 예시로서, 이러한 컴퓨터 판독가능 매체들은 RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 저장소, 자기 디스크 저장 또는 다른 자기 저장 디바이스들, 또는 명령들 또는 데이터 구조들의 형태로 원하는 프로그램 코드를 저장하는데 사용될 수 있고, 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있고; 여기서 사용되는 디스크(disk) 및 디스크(disc)는 컴팩트 디스크(disc)(CD), 레이저 디스크(disc), 광 디스크(disc), 디지털 다기능 디스크(disc)(DVD), 플로피 디스크(disk), 및 블루-레이 디스크(disc)를 포함하며, 여기서 디스크(disk)들은 데이터를 일반적으로 자기적으로 재생하지만, 디스크(disc)들은 레이저들을 이용하여 광학적으로 데이터를 재생한다. 상기한 것들의 조합들 또한 컴퓨터 판독가능 매체들의 범위 내에 포함되어야 한다.
컴퓨터 판독가능 매체 상의 저장에 부가하여, 명령들 및/또는 데이터는, 통신 장치에 포함된 송신 매체들 상에서의 신호들로서 제공될 수 있다. 예를 들어, 통신 장치는, 명령들 및 데이터를 나타내는 신호들을 갖는 트랜시버를 포함할 수 있다. 명령들 및 데이터는, 하나 이상의 프로세서들로 하여금, 청구항들에서 서술된 기능들을 구현하게 하도록 구성된다. 즉, 통신 장치는, 개시된 기능들을 수행하기 위한 정보를 나타내는 신호들을 갖는 송신 매체들을 포함한다. 제 1 시간에, 통신 장치에 포함된 송신 매체들은 개시된 기능들을 수행하기 위한 정보의 제 1 부분을 포함할 수 있고, 반면에, 제 2 시간에, 통신 장치에 포함된 송신 매체들은 개시된 기능들을 수행하기 위한 정보의 제 2 부분을 포함할 수 있다.
개시된 양상들의 이전의 설명은, 이 분야의 임의의 당업자가 본 발명을 실시 또는 이용하는 것을 가능하게 하도록 제공된다. 이 양상들에 대한 다양한 변형들은 이 분야의 당업자들에게 쉽게 자명할 것이고, 본 명세서에서 정의된 일반적 원리들은 본 발명의 사상 또는 범위를 벗어남이 없이 다른 양상들에 적용될 수 있다.
Claims (36)
- 분리된 맵들을 합병하기 위한 프로세서 구현 방법으로서,
경로 맵을 포함하는 디지털 파일을 수신하는 단계,
복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하는 단계,
상기 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯(trajectory plot)을 수신하는 단계,
상기 전송기 맵과 상기 경로 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들(hypotheses)을 설정하는 단계,
상기 프로세서에서, 복수의 비용들을 계산하는 단계 ― 상기 복수의 비용들의 각각의 비용은 상기 복수의 가설들의 각각의 가설에 기초한 상기 경로 맵을 통한 상기 제 1 궤적 플롯의 비용을 포함함 ― , 및
상기 복수의 비용들 중 최소치에 기초하여 상기 복수의 가설들로부터 하나의 가설을 선택하는 단계를 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 경로 맵은 평면도를 포함하는 빌딩 맵을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵은 액세스 포인트(AP) 맵을 포함하고,
상기 복수의 전송기들은 복수의 액세스 포인트들에 대한 식별자들을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵의 소스는 상기 경로 맵의 소스로부터 독립적인,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 경로 맵의 소스는 장소 운영자(venue operator)에 관련된 소스를 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 경로 맵의 소스는 상기 복수의 전송기들의 위치들을 알지 못하는 소스를 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 경로 맵은 상기 경로 맵의 적어도 하나의 포인트를 지오-로케이션(geo-location)에 앵커링하는 상기 지오-로케이션을 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
한 세트의 이산 노드들에 대한 상기 경로 맵을 양자화하는 단계를 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵은 RSSI(received signal strength indication) 맵을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵은 RTT(round-trip time) 맵을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵은 상기 복수의 전송기들 중 적어도 하나를 지오-로케이션에 앵커링하는 상기 지오-로케이션을 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵은 디바이스들의 SLAP(self-locating access points) 세트를 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
복수의 액세스 전송기는 합병된 네트워크의 적어도 일부분을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵과 상기 경로 맵 사이의 상기 고유한 변환은 상기 맵과 상기 경로 맵 사이의 상대적인 회전을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵과 상기 경로 맵 사이의 상기 고유한 변환은 상기 맵과 상기 경로 맵 사이의 상대적인 스케일링을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 전송기 맵에 대해 복수의 궤적 플롯들을 수신하는 단계를 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 11 항에 있어서,
상기 복수의 가설들의 각각의 가설에 기초한 상기 경로 맵을 통한 상기 제 1 궤적 플롯의 비용은, 상기 복수의 가설들의 각각의 가설에 기초한 이산 노드들의 세트를 통한 궤적 플롯들 중 제 1 궤적 플롯의 비용을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
합병된 맵을 형성하기 위해 상기 궤적 플롯 및 상기 경로 맵의 최상의 피트(best fit)로서 선택된 하나의 가설을 적용하는 단계를 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
선택된 하나의 가설, 상기 전송기 맵 및 상기 경로 맵에 기초하여 합병된 맵을 생성하는 단계를 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 경로 맵은 상기 경로 맵의 적어도 하나의 포인트를 제 1 지오-로케이션에 앵커링하는 상기 제 1 지오-로케이션을 더 포함하고, 상기 제 1 지오-로케이션은 제 1 불확실성을 갖고,
상기 전송기 맵은 상기 복수의 액세스 포인트들 중 적어도 하나를 제 2 지오-로케이션에 앵커링하는 상기 제 2 지오-로케이션을 더 포함하고, 상기 제 2 지오-로케이션은 제 2 불확실성을 갖고, 그리고
합병된 맵은 상기 제 1 불확실성 플러스 상기 제 2 불확실성 미만의 제 3 불확실성을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 제 1 항에 있어서,
상기 방법은,
컴퓨팅 디바이스, 또는
모바일 디바이스, 또는
액세스 포인트, 또는
지능형 액세스 포인트 중 적어도 하나 상에서 구현되는,
분리된 맵들을 합병하기 위한 프로세서 구현 방법. - 분리된 맵들을 합병하기 위한 모바일 디바이스로서,
루트 맵을 포함하는 디지털 파일을 수신하기 위한 수단,
복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 수단,
상기 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 수단,
상기 전송기 맵과 상기 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 수단,
복수의 비용들을 계산하기 위한 수단 ― 상기 복수의 비용들의 각각의 비용은 상기 복수의 가설들의 각각의 가설에 기초한 상기 루트 맵을 통한 상기 제 1 궤적 플롯의 비용을 포함함 ― , 및
상기 복수의 비용들 중 최소치에 기초하여 상기 복수의 가설들로부터 하나의 가설을 선택하기 위한 수단을 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵의 소스는 상기 루트 맵의 소스로부터 독립적인,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
한 세트의 이산 노드들에 대한 상기 루트 맵을 양자화하는 것을 더 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵은 RSSI(received signal strength indication) 맵을 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵은 RTT(round-trip time) 맵을 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵과 상기 루트 맵 사이의 상기 고유한 변환은 상기 맵과 상기 루트 맵 사이의 상대적인 회전을 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵과 상기 루트 맵 사이의 상기 고유한 변환은 상기 맵과 상기 루트 맵 사이의 상대적인 스케일링을 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
상기 전송기 맵에 대해 복수의 궤적 플롯들을 수신하기 위한 수단을 더 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
합병된 맵을 형성하기 위해 상기 궤적 플롯 및 상기 루트 맵의 최상의 피트로서 선택된 하나의 가설을 적용하기 위한 수단을 더 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 제 22 항에 있어서,
선택된 하나의 가설, 상기 전송기 맵 및 상기 루트 맵에 기초하여 합병된 맵을 생성하기 위한 수단을 더 포함하는,
분리된 맵들을 합병하기 위한 모바일 디바이스. - 분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스로서,
상기 메모리는,
루트 맵을 포함하는 디지털 파일을 수신하기 위한 소프트웨어 명령들,
복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 소프트웨어 명령들,
상기 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 소프트웨어 명령들,
상기 전송기 맵과 상기 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 소프트웨어 명령들,
복수의 비용들을 계산하기 위한 소프트웨어 명령들 ― 상기 복수의 비용들의 각각의 비용은 상기 복수의 가설들의 각각의 가설에 기초한 상기 루트 맵을 통한 상기 제 1 궤적 플롯의 비용을 포함함 ― , 및
상기 복수의 비용들 중 최소치에 기초하여 상기 복수의 가설들로부터 하나의 가설을 선택하기 위한 소프트웨어 명령들을 포함하는,
분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스. - 제 32 항에 있어서,
합병된 맵을 형성하기 위해 상기 궤적 플롯 및 상기 루트 맵의 최상의 피트로서 선택된 하나의 가설을 적용하는 것을 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스. - 제 32 항에 있어서,
선택된 하나의 가설, 상기 전송기 맵 및 상기 루트 맵에 기초하여 합병된 맵을 생성하는 것을 더 포함하는,
분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스. - 제 32 항에 있어서,
상기 디바이스는,
컴퓨팅 디바이스, 또는
모바일 디바이스, 또는
액세스 포인트, 또는
지능형 액세스 포인트 중 적어도 하나인,
분리된 맵들을 합병하기 위한 프로세서 및 메모리를 포함하는 디바이스. - 프로그램 코드가 저장된 컴퓨터-판독 가능 저장 매체로서,
루트 맵을 포함하는 디지털 파일을 수신하기 위한 프로그램 코드,
복수의 전송기들에 대한 식별자들을 포함하는 전송기 맵을 수신하기 위한 프로그램 코드,
상기 전송기 맵에 대해 모바일 디바이스의 제 1 궤적 플롯을 수신하기 위한 프로그램 코드,
상기 전송기 맵과 상기 루트 맵 사이의 고유한 변환을 각각 정의하는 복수의 가설들을 설정하기 위한 프로그램 코드,
프로세서에서, 복수의 비용들을 계산하기 위한 프로그램 코드 ― 상기 복수의 비용들의 각각의 비용은 상기 복수의 가설들의 각각의 가설에 기초한 상기 루트 맵을 통한 상기 제 1 궤적 플롯의 비용을 포함함 ― , 및
상기 복수의 비용들 중 최소치에 기초하여 상기 복수의 가설들로부터 하나의 가설을 선택하기 위한 프로그램 코드를 포함하는,
프로그램 코드가 저장된 컴퓨터-판독 가능 저장 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/436,600 | 2012-03-30 | ||
| US13/436,600 US8838376B2 (en) | 2012-03-30 | 2012-03-30 | Mashup of AP location and map information for WiFi based indoor positioning |
| PCT/US2013/028937 WO2013148077A1 (en) | 2012-03-30 | 2013-03-04 | Mashup of ap location and map information for wifi based indoor positioning |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150001779A true KR20150001779A (ko) | 2015-01-06 |
Family
ID=47902359
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147030261A KR20150001779A (ko) | 2012-03-30 | 2013-03-04 | Wifi 기반 실내 포지셔닝을 위한 ap 위치 및 맵 정보의 매시업 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8838376B2 (ko) |
| EP (1) | EP2831544A1 (ko) |
| JP (2) | JP2015519592A (ko) |
| KR (1) | KR20150001779A (ko) |
| CN (1) | CN104204723B (ko) |
| WO (1) | WO2013148077A1 (ko) |
Families Citing this family (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8706413B2 (en) * | 2011-10-17 | 2014-04-22 | Qualcomm Incorporated | Determining a likelihood of a directional transition at a junction in an encoded routability graph description |
| WO2013067526A1 (en) | 2011-11-04 | 2013-05-10 | Remote TelePointer, LLC | Method and system for user interface for interactive devices using a mobile device |
| US9014716B2 (en) * | 2012-04-10 | 2015-04-21 | Qualcomm Incorporated | Techniques for processing perceived routability constraints that may or may not affect movement of a mobile device within an indoor environment |
| US9123152B1 (en) | 2012-05-07 | 2015-09-01 | Google Inc. | Map reports from vehicles in the field |
| US8849308B2 (en) | 2012-11-21 | 2014-09-30 | Apple Inc. | Tiling of map data |
| US9226111B2 (en) | 2012-11-21 | 2015-12-29 | Apple Inc. | Pathway matching |
| US8996302B2 (en) | 2012-11-30 | 2015-03-31 | Apple Inc. | Reduction of the impact of hard limit constraints in state space models |
| US10548150B2 (en) * | 2013-03-14 | 2020-01-28 | Federated Wireless, Inc. | Radio resource management |
| US9146299B2 (en) | 2013-08-06 | 2015-09-29 | Qualcomm Incorporated | Method and apparatus for position estimation using trajectory |
| WO2015057227A1 (en) * | 2013-10-17 | 2015-04-23 | Intel Corporation | Method and apparatus for time of flight fingerprint and geo-location |
| US9357520B2 (en) * | 2014-01-31 | 2016-05-31 | Google Inc. | Methods and systems for signal diffusion modeling for a discretized map of signal strength |
| US9419731B2 (en) | 2014-02-05 | 2016-08-16 | Google Inc. | Methods and systems for determining signal strength maps for wireless access points robust to measurement counts |
| IN2014MU00776A (ko) * | 2014-03-07 | 2015-09-25 | Tata Consultancy Services Ltd | |
| CN106063343B (zh) | 2014-03-31 | 2020-01-03 | 英特尔Ip公司 | 用于接入点位置令牌的方法和装置 |
| US9408038B2 (en) * | 2014-04-25 | 2016-08-02 | Aruba Networks, Inc. | Filtering out access point data based on non-conformity with other access point data |
| US10009733B2 (en) | 2014-05-13 | 2018-06-26 | Samsung Electronics Co., Ltd. | Method and system for determining a position of a mobile device by an access point |
| US9528837B2 (en) * | 2014-06-04 | 2016-12-27 | Qualcomm Incorporated | Mobile device position uncertainty based on a measure of potential hindrance of an estimated trajectory |
| WO2015191913A2 (en) | 2014-06-11 | 2015-12-17 | Hoyos Labs Corp. | System and method for facilitating user access to vehicles based on biometric information |
| US9712975B2 (en) * | 2014-06-29 | 2017-07-18 | Aruba Networks, Inc. | System and method for displaying mobility trails for mobile clients |
| CN105333868A (zh) * | 2014-06-30 | 2016-02-17 | 奇点新源国际技术开发(北京)有限公司 | 一种定位方法、装置及系统 |
| US10240995B2 (en) | 2014-08-01 | 2019-03-26 | Google Llc | Construction of a surface of best GPS visibility from passive traces using SLAM for horizontal localization and GPS readings and barometer readings for elevation estimation |
| US9838846B1 (en) | 2014-08-01 | 2017-12-05 | Google Llc | Extraction of walking direction from device orientation and reconstruction of device orientation during optimization of walking direction |
| US10209062B1 (en) | 2014-08-01 | 2019-02-19 | Google Llc | Use of offline algorithm to determine location from previous sensor data when location is requested |
| CN104168578A (zh) * | 2014-08-11 | 2014-11-26 | 无锡高联信息技术有限公司 | 用于lte系统和大数据管理的信号分布构建方法 |
| JP2016045127A (ja) * | 2014-08-25 | 2016-04-04 | 株式会社協和エクシオ | ビーコンを用いた測位システム |
| WO2016079656A1 (en) * | 2014-11-18 | 2016-05-26 | Egypt-Japan University Of Science And Technology | Zero-calibration accurate rf-based localization system for realistic environments |
| CN104657755A (zh) * | 2014-12-11 | 2015-05-27 | 中国科学院自动化研究所北仑科学艺术实验中心 | 室内工作人员定位和文件管理系统及其监控方法 |
| US9301100B1 (en) | 2015-07-20 | 2016-03-29 | Blackberry Limited | Indoor positioning systems and wireless fingerprints |
| TWI575222B (zh) * | 2015-09-11 | 2017-03-21 | 蹦世界數位創意股份有限公司 | 基於區域佈局影像產生導引路網的資料處理系統及方法 |
| US10185788B2 (en) * | 2015-10-13 | 2019-01-22 | Samsung Electronics Co., Ltd. | Rule based completion of maps with partial data |
| CN105208217B (zh) * | 2015-10-23 | 2019-02-12 | Oppo广东移动通信有限公司 | 一种事件提醒方法及装置 |
| US20170131402A1 (en) * | 2015-11-06 | 2017-05-11 | Mitsubishi Electric Research Laboratories, Inc. | System and Method for Augmented Localization of WiFi Devices |
| US9848301B2 (en) | 2015-11-20 | 2017-12-19 | At&T Intellectual Property I, L.P. | Facilitation of mobile device geolocation |
| US9667809B1 (en) | 2016-01-06 | 2017-05-30 | International Business Machines Corporation | Global data service device connection manager |
| CN105516927A (zh) * | 2016-01-15 | 2016-04-20 | 深圳市国创新能源研究院 | 一种基于wifi的无线设备轨迹分析方法、装置和系统 |
| CN109155920B (zh) * | 2016-04-12 | 2021-11-05 | 意大利电信股份公司 | 无线电接入网络节点 |
| CN105954717B (zh) * | 2016-04-22 | 2019-04-02 | 上海潘氏投资管理有限公司 | 位置获取方法及装置 |
| AU2017101870A4 (en) * | 2016-06-06 | 2019-12-05 | Beijing Didi Infinity Technology And Development Co., Ltd. | Systems and methods for allocating appointment orders |
| US9668233B1 (en) | 2016-07-12 | 2017-05-30 | Xirrus, Inc. | Wireless communication network with distributed device location determination |
| US9998876B2 (en) | 2016-07-27 | 2018-06-12 | At&T Intellectual Property I, L.P. | Inferring user equipment location data based on sector transition |
| EP3322149B1 (en) * | 2016-11-10 | 2023-09-13 | Tata Consultancy Services Limited | Customized map generation with real time messages and locations from concurrent users |
| US10692023B2 (en) * | 2017-05-12 | 2020-06-23 | International Business Machines Corporation | Personal travel assistance system and method for traveling through a transport hub |
| DE102017211712A1 (de) | 2017-07-10 | 2019-01-10 | Audi Ag | Verfahren zur Datengenerierung zum Erzeugen und Aktualisieren einer Topologiekarte für mindestens einen Raum mindestens eines Gebäudes |
| EP3712561B1 (en) * | 2017-11-15 | 2023-05-10 | Nokia Solutions and Networks Oy | Method and device for determining space partitioning of environment |
| CN108770057B (zh) * | 2018-03-30 | 2021-05-04 | 博彦科技股份有限公司 | 预定指纹库的确定方法及指纹定位方法、装置、存储介质 |
| US11788845B2 (en) | 2018-06-29 | 2023-10-17 | Baidu Usa Llc | Systems and methods for robust self-relocalization in a visual map |
| US10932139B2 (en) * | 2018-11-01 | 2021-02-23 | Cisco Technology, Inc. | Precise access point placement and location measurement |
| EP3651032A1 (de) * | 2018-11-06 | 2020-05-13 | Siemens Schweiz AG | Verfahren und vorrichtung zum bereitstellen eines aktualisierten digitalen gebäudemodells |
| CN109495949A (zh) * | 2018-12-20 | 2019-03-19 | 上海快仓智能科技有限公司 | 访问接入点地图构建和访问接入点切换的方法 |
| KR20200138512A (ko) * | 2019-05-30 | 2020-12-10 | 극동대학교 산학협력단 | 스마트 폰 센서만을 이용한 실내위치인식 방법 및 이 방법이 동작되는 스마트폰 단말 |
| EP3754303A1 (en) | 2019-06-19 | 2020-12-23 | HERE Global B.V. | Floor levels of a venue |
| US11087103B2 (en) | 2019-07-02 | 2021-08-10 | Target Brands, Inc. | Adaptive spatial granularity based on system performance |
| US11343244B2 (en) * | 2019-08-02 | 2022-05-24 | Dell Products, Lp | Method and apparatus for multi-factor verification of a computing device location within a preset geographic area |
| US11197262B2 (en) | 2019-08-02 | 2021-12-07 | Dell Products, Lp | Systems and methods of room profiling using wireless local area networks |
| US11330551B2 (en) | 2019-08-12 | 2022-05-10 | Dell Products, Lp | Method and apparatus for location aware optimal wireless link selection system |
| US11409881B2 (en) | 2019-08-12 | 2022-08-09 | Dell Products, Lp | Method and apparatus for wireless signal based location security system |
| US11510047B2 (en) | 2019-08-12 | 2022-11-22 | Dell Products, Lp | Learning based wireless performance adjustment for mobile information handling system |
| US10921130B1 (en) | 2019-09-18 | 2021-02-16 | Here Global B.V. | Method and apparatus for providing an indoor pedestrian origin-destination matrix and flow analytics |
| US11122443B2 (en) * | 2019-09-19 | 2021-09-14 | Cisco Technology, Inc. | Automated access point mapping systems and methods |
| JP7099716B2 (ja) * | 2019-09-27 | 2022-07-12 | サイレックス・テクノロジー株式会社 | 特定装置、特定方法、および、プログラム |
| US20210385621A1 (en) * | 2020-06-05 | 2021-12-09 | Where.Place | Method and System for Mapping Persons and Resources |
| CN114061579A (zh) * | 2020-07-30 | 2022-02-18 | 华为技术有限公司 | 室内定位、室内导航的方法、装置、电子设备及存储介质 |
| US20230366978A1 (en) * | 2020-11-24 | 2023-11-16 | Mitsubishi Electric Corporation | Location estimation apparatus, facility device system, location estimation method, and recording medium |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1436639B1 (en) | 2001-09-05 | 2007-06-20 | Newbury Networks Inc. | Position detection and location tracking in a wireless network |
| DE112005001761T5 (de) | 2004-07-23 | 2007-05-24 | Wireless Valley Communications, Inc., Austin | System, Verfahren und Vorrichtung zum Bestimmen und Verwenden einer Position von drahtlosen Vorrichtungen oder einer Infrastruktur zur Verbesserung eines drahtlosen Netzes |
| US7496445B2 (en) * | 2005-04-27 | 2009-02-24 | Proxemics, Llc | Wayfinding |
| US7761233B2 (en) * | 2006-06-30 | 2010-07-20 | International Business Machines Corporation | Apparatus and method for measuring the accurate position of moving objects in an indoor environment |
| US7774132B2 (en) | 2006-07-05 | 2010-08-10 | Cisco Technology, Inc. | Providing navigation directions |
| AU2008283845A1 (en) | 2007-08-06 | 2009-02-12 | Trx Systems, Inc. | Locating, tracking, and/or monitoring personnel and/or assets both indoors and outdoors |
| US9277351B2 (en) | 2007-09-07 | 2016-03-01 | International Business Machines Corporation | Wireless transmission duration and location-based services |
| US8040219B2 (en) | 2008-11-06 | 2011-10-18 | Sony Ericsson Mobile Communications Ab | System and method for in-building location determination |
| US8538688B2 (en) * | 2008-11-18 | 2013-09-17 | Nokia Corporation | User generated pedestrian and indoor shortcut routes for navigation systems |
| WO2010106530A2 (en) * | 2009-03-19 | 2010-09-23 | Cork Institute Of Technology | A location and tracking system |
| US8688139B2 (en) * | 2009-09-10 | 2014-04-01 | Qualcomm Incorporated | Concurrent wireless transmitter mapping and mobile station positioning |
| US9267801B2 (en) * | 2009-12-09 | 2016-02-23 | Qualcomm Incorporated | Method and apparatus for reducing instructions in an indoor navigation environment |
-
2012
- 2012-03-30 US US13/436,600 patent/US8838376B2/en not_active Expired - Fee Related
-
2013
- 2013-03-04 EP EP13710941.9A patent/EP2831544A1/en not_active Ceased
- 2013-03-04 CN CN201380016907.0A patent/CN104204723B/zh not_active Expired - Fee Related
- 2013-03-04 KR KR1020147030261A patent/KR20150001779A/ko not_active Application Discontinuation
- 2013-03-04 WO PCT/US2013/028937 patent/WO2013148077A1/en active Application Filing
- 2013-03-04 JP JP2015503226A patent/JP2015519592A/ja not_active Ceased
-
2017
- 2017-08-31 JP JP2017167077A patent/JP2018023124A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018023124A (ja) | 2018-02-08 |
| CN104204723B (zh) | 2017-05-10 |
| CN104204723A (zh) | 2014-12-10 |
| JP2015519592A (ja) | 2015-07-09 |
| WO2013148077A1 (en) | 2013-10-03 |
| US20130257657A1 (en) | 2013-10-03 |
| US8838376B2 (en) | 2014-09-16 |
| EP2831544A1 (en) | 2015-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8838376B2 (en) | Mashup of AP location and map information for WiFi based indoor positioning | |
| Laoudias et al. | A survey of enabling technologies for network localization, tracking, and navigation | |
| KR102355389B1 (ko) | 로케이션-관련 데이터의 선택적 크라우드소싱 | |
| US9606215B2 (en) | Terrestrial positioning system calibration | |
| EP2556706B1 (en) | Radio model updating | |
| US8594701B2 (en) | System and/or method for pedestrian navigation | |
| JP5518914B2 (ja) | 無線位置決定精度を改善するための方法及び装置 | |
| KR101518795B1 (ko) | 어그리게이팅된 otdoa 보조 데이터를 사용한 lte 무선 기지국들의 타이밍의 획득 | |
| EP3227707B1 (en) | Supporting positioning quality assurance | |
| US8954089B2 (en) | Positioning LTE wireless base stations using aggregated OTDOA assistance data | |
| US20130342565A1 (en) | Indoor structure inference using points of interest | |
| EP2906963A2 (en) | Methods and network nodes for positioning based on displacement data | |
| CN107110652B (zh) | 处理空间特征 | |
| US8812023B2 (en) | Outdoor position estimation of a mobile device within a vicinity of one or more indoor environments | |
| TWI410662B (zh) | 定位方法與定位系統 | |
| CN103404177B (zh) | 用于定位的节点和方法 | |
| Kangas et al. | Positioning in LTE | |
| Femminella et al. | A zero-configuration tracking system for first responders networks | |
| WO2015116588A1 (en) | Automatic geo-reference error correction for crowdsourcing services | |
| Yu et al. | Bootstrapped learning of WiFi access point in hybrid positioning system | |
| US20150350847A1 (en) | Phone based context engine for positioning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |