JP2015513858A - 多機能自動ビデオ記録装置 - Google Patents
多機能自動ビデオ記録装置 Download PDFInfo
- Publication number
- JP2015513858A JP2015513858A JP2014560133A JP2014560133A JP2015513858A JP 2015513858 A JP2015513858 A JP 2015513858A JP 2014560133 A JP2014560133 A JP 2014560133A JP 2014560133 A JP2014560133 A JP 2014560133A JP 2015513858 A JP2015513858 A JP 2015513858A
- Authority
- JP
- Japan
- Prior art keywords
- camera
- subject
- base station
- remote device
- positioner
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/10—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting around a horizontal axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/18—Heads with mechanism for moving the apparatus relatively to the stand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/2007—Undercarriages with or without wheels comprising means allowing pivoting adjustment
- F16M11/2014—Undercarriages with or without wheels comprising means allowing pivoting adjustment around a vertical axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/24—Undercarriages with or without wheels changeable in height or length of legs, also for transport only, e.g. by means of tubes screwed into each other
- F16M11/242—Undercarriages with or without wheels changeable in height or length of legs, also for transport only, e.g. by means of tubes screwed into each other by spreading of the legs
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/02—Locking means
- F16M2200/021—Locking means for rotational movement
- F16M2200/022—Locking means for rotational movement by friction
Abstract
Description

Claims (39)
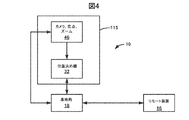
- 自由運動する被写体の自動ビデオ記録用のシステムにおいて、
基地局と、
前記自由運動する被写体と関連付けられたリモート装置と、
カメラを方向付けするための位置決め器と、
を有し、
前記基地局は、前記リモート装置と通信自在に結合され、且つ、前記リモート装置の場所に関する情報を受け取るように構成されており、且つ、前記基地局は、前記リモート装置とのやり取りに少なくとも部分的に基づいて前記カメラを方向付けするように前記位置決め器を制御することを特徴とするシステム。 - 請求項1に記載のシステムにおいて、前記基地局及び前記位置決め器は、一体的に統合されることを特徴とするシステム。
- 請求項2に記載のシステムにおいて、前記位置決め器は、パンドライブと、カメラ取付具と、を有することを特徴とするシステム。
- 請求項3に記載のシステムにおいて、前記カメラ取付具は、手動で調節自在のチルトを有することを特徴とするシステム。
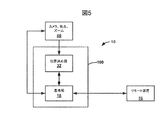
- 請求項1に記載のシステムにおいて、前記基地局、前記位置決め器、及び前記カメラは、一体的に統合されることを特徴とするシステム。
- 請求項1に記載のシステムにおいて、前記基地局は、前記カメラの動作を制御することを特徴とするシステム。
- 請求項1に記載のシステムにおいて、前記位置決め器及び前記カメラは、一体的に統合されており、且つ、前記基地局は、無線通信を使用することにより、前記位置決め器及び前記カメラを制御することを特徴とするシステム。
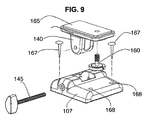
- 第1装置及び第2装置が位置合わせされた状態に留まるように、前記第1装置を前記第2装置上に取り付ける装置において、
a)前記第1装置を支持するためのプラットフォームであって、
b)前記第1装置を前記プラットフォームに接続する際に前記第2装置の類似の向きに対して前記第1装置を視覚的に位置合わせするように構成されたプラットフォームと、
c)前記第1装置を前記プラットフォームに接続し、且つ、前記第2装置の向きと適応した状態において前記第1装置を保持するための第1留め具であって、
d)前記プラットフォームは、第2留め具により、前記第2装置に接続され、
e)前記プラットフォームは、前記第2留め具の軸を中心として回転してもよい、第1留め具と、
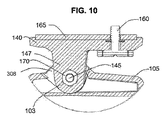
を有することを特徴とする装置。 - 請求項8に記載の装置において、前記プラットフォームは、組み立てられた際に、前記第1留め具に対して垂直である少なくとも1つの位置合わせ特徴を有することを特徴とする装置。
- 請求項8に記載の装置において、前記プラットフォームは、前記第1留め具に対して平行である少なくとも1つの位置合わせ特徴を有することを特徴とする装置。
- 請求項8に記載の装置において、前記第1装置は、カメラであり、且つ、前記カメラは、前記第1留め具を使用することにより、前記プラットフォームに付着されることを特徴とする装置。
- 請求項11に記載の装置において、前記第2装置は、前記付着されたカメラの向きを制御することを特徴とする装置。
- 請求項11に記載の装置において、前記第2装置に付着された光源を更に有し、前記光源は、前記第2装置の向きに沿って方向付けされた光ビームを提供することを特徴とする装置。
- 請求項8に記載の装置において、前記プラットフォームは、第1平坦表面を有し、且つ、前記第2装置は、第2平坦表面を有し、前記第1平坦表面及び前記第2平坦表面は、組み立てられた際に、前記第1留め具に対して垂直であり、且つ、前記第1平坦表面及び前記第2平坦表面は、組み立てられた際に、実質的に共通プレーン内に位置することを特徴とする装置。
- 防水型電子装置において、
内側表面と、外側表面と、を有する軟質ポリマーエンクロージャと、
電子的及び電気機械的コンポーネントと、
を有し、
前記内側表面は、前記電子的及び電気機械的コンポーネントと直接接触していることを特徴とする装置。 - 請求項15に記載の防水型電子装置において、フレームを更に有し、前記フレームは、前記軟質ポリマーエンクロージャに装着され、且つ、前記フレームは、実質的に硬質の材料から製造されることを特徴とする装置。
- 請求項16に記載の防水型電子装置において、前記防水型電子装置を人物に装着するためのストラップを更に有することを特徴とする装置。
- 請求項15に記載の防水型電子装置において、前記軟質ポリマーエンクロージャは、40ショアA〜10ショアAの範囲の硬度を有することを特徴とする装置。
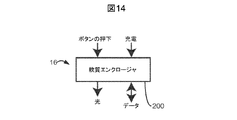
- 請求項15に記載の防水型電子装置において、前記電子的及び電気機械的コンポーネントのうちの少なくとも1つは、少なくとも1つのマイクロスイッチを有することを特徴とする装置。
- 請求項16に記載の防水型電子装置において、前記電子的及び電気機械的コンポーネントのうちのいくつかは、前記軟質ポリマーエンクロージャに部分的にのみ埋め込まれており、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有し、且つ、前記軟質ポリマーエンクロージャの前記外側表面は、前記露出した表面エリアと共に、前記防水型電子装置の外側表面を形成することを特徴とする装置。
- 請求項20に記載の防水型電子装置において、前記少なくとも1つの回路基板に接続された前記電子的及び電気機械的コンポーネントを有する少なくとも1つの回路基板を更に有することを特徴とする装置。
- 請求項20に記載の防水型電子装置において、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有する少なくとも1つの電気コネクタを有し、前記電気コネクタの前記露出した表面エリアは、電気回路に接続されてもよいことを特徴とする装置。
- 請求項20に記載の防水型電子装置において、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有する少なくとも1つの光導体を有し、前記少なくとも1つの光導体の前記露出した表面エリアは、前記少なくとも1つの光導体の光放出端部であることを特徴とする装置。
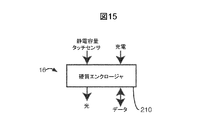
- 請求項21に記載の防水型電子装置において、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有するタッチスクリーンを有し、前記タッチスクリーンの前記露出した表面エリアは、前記タッチスクリーンの接触可能な表面であることを特徴とする装置。
- 請求項21に記載の防水型電子装置において、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有するマイクロフォンを有し、前記マイクロフォンの前記露出した表面エリアは、前記マイクロフォンのメンブレイン表面であることを特徴とする装置。
- 請求項21に記載の防水型電子装置において、前記部分的に埋め込まれた電子的及び電気機械的コンポーネントは、露出した表面エリアを有するスピーカを有し、前記スピーカの前記露出した表面エリアは、前記スピーカのメンブレイン表面であることを特徴とする装置。
- 自由運動する被写体の自動ビデオ記録用の装置において、
前記被写体と関連付けられたリモート装置を有し、
前記リモート装置は、音声及び音響を検知するためのマイクロフォンを有し、前記リモート装置は、前記被写体を自動的に追跡するために使用されることを特徴とする装置。 - 請求項27に記載の装置において、前記ビデオ記録を制御するための基地局を更に有し、前記基地局は、前記リモート装置と通信自在に結合されており、前記基地局は、前記マイクロフォンによって検知された音声及び音響の電子的複写を受け取ると共に記録することが可能であることを特徴とする装置。
- 請求項28に記載の装置において、前記基地局は、前記マイクロフォンによって検知された音声指示を認識、解析、及び実装することを特徴とする装置。
- 請求項29に記載の装置において、前記リモート装置は、前記基地局から受け取った通信に応答して音響を放出するスピーカを更に有することを特徴とする装置。
- 請求項29に記載の装置において、前記リモート装置と前記基地局の間の通信は、タイムスタンプを含むことを特徴とする装置。
- 請求項29に記載の装置において、記録されたビデオと記録された音響は、タイムスタンプを使用することにより、同期化されることを特徴とする装置。
- 入力及び出力制御及び接続を有するマイクロコントローラを使用することにより、被写体の自動ビデオ記録においてカメラを制御する方法において、
a)前記カメラ及び前記被写体の場所データを取得するステップと、
b)前記カメラと前記被写体の間の距離を判定するステップと、
c)前記カメラと前記被写体の間の前記距離に部分的に基づいて必要とされる視野を算出するステップと、
d)前記算出された必要とされる視野に基づいて前記カメラ用のズーム制御指示を提供するステップと、
を有することを特徴とする方法。 - 請求項33に記載の方法において、前記被写体の運動の速度を判定するステップと、前記速度に部分的に基づいて必要とされる視野を算出するステップとを更に有することを特徴とする方法。
- 請求項33に記載の方法において、前記カメラと前記被写体の間の前記距離に基づいて焦点制御指示を提供するステップを更に有することを特徴とする方法。
- 請求項33に記載の方法において、前記被写体の場所の不確実性を推定するステップと、前記不確実性に部分的に基づいてズーム制御指示を提供するステップとを更に有することを特徴とする方法。
- 請求項33に記載の方法において、前記被写体のサイズのユーザー入力を受け付けるステップと、前記必要とされる視野を算出する際に前記被写体の前記サイズを含めるステップとを更に有することを特徴とする方法。
- 請求項33に記載の方法において、記録されている活動のタイプのユーザー入力を受け付けるステップと、前記必要とされる視野の算出の際に前記活動のタイプを含めるステップとを更に有することを特徴とする方法。
- 請求項33に記載の方法において、前記被写体の現在の場所、速度、及び加速度に基づいて前記被写体の将来の場所を推定するステップと、前記推定された将来の場所を前記必要とされる視野の算出において使用するステップとを更に有することを特徴とする方法。
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261606358P | 2012-03-02 | 2012-03-02 | |
| US61/606,358 | 2012-03-02 | ||
| US201261606981P | 2012-03-05 | 2012-03-05 | |
| US201261606976P | 2012-03-05 | 2012-03-05 | |
| US201261606975P | 2012-03-05 | 2012-03-05 | |
| US61/606,976 | 2012-03-05 | ||
| US61/606,975 | 2012-03-05 | ||
| US61/606,981 | 2012-03-05 | ||
| US201261607549P | 2012-03-06 | 2012-03-06 | |
| US61/607,549 | 2012-03-06 | ||
| US201261745346P | 2012-12-21 | 2012-12-21 | |
| US61/745,346 | 2012-12-21 | ||
| PCT/US2013/028933 WO2013131100A1 (en) | 2012-03-02 | 2013-03-04 | Multifunction automatic video recording device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015513858A true JP2015513858A (ja) | 2015-05-14 |
| JP2015513858A5 JP2015513858A5 (ja) | 2016-05-12 |
Family
ID=49042894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014560133A Pending JP2015513858A (ja) | 2012-03-02 | 2013-03-04 | 多機能自動ビデオ記録装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9313394B2 (ja) |
| EP (1) | EP2820840A4 (ja) |
| JP (1) | JP2015513858A (ja) |
| AU (1) | AU2013225635B2 (ja) |
| CA (1) | CA2866131A1 (ja) |
| WO (1) | WO2013131100A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8704904B2 (en) | 2011-12-23 | 2014-04-22 | H4 Engineering, Inc. | Portable system for high quality video recording |
| EP2618566A1 (en) * | 2012-01-23 | 2013-07-24 | FilmMe Group Oy | Controlling controllable device during performance |
| WO2014081767A1 (en) | 2012-11-21 | 2014-05-30 | H4 Engineering, Inc. | Automatic cameraman, automatic recording system and video recording network |
| CA2947936C (en) | 2013-05-04 | 2023-02-21 | Christopher Decharms | Mobile security technology |
| US10171742B2 (en) * | 2013-09-06 | 2019-01-01 | Sony Corporation | Image capturing apparatus, method, and program with operation state determination based upon angular velocity detection |
| US20150288857A1 (en) * | 2014-04-07 | 2015-10-08 | Microsoft Corporation | Mount that facilitates positioning and orienting a mobile computing device |
| USD750693S1 (en) | 2014-07-03 | 2016-03-01 | H4 Engineering, Inc. | Electronic communication device with wearable housing |
| WO2016098458A1 (ja) * | 2014-12-15 | 2016-06-23 | ソニー株式会社 | 情報処理方法、映像処理装置及びプログラム |
| JP6410923B2 (ja) | 2015-03-26 | 2018-10-24 | 富士フイルム株式会社 | 追尾制御装置、追尾制御方法、追尾制御プログラム、及び、自動追尾撮影システム |
| EP3317880A1 (en) | 2015-07-03 | 2018-05-09 | H4 Engineering, Inc. | Tracking camera network |
| US9992517B2 (en) | 2016-02-23 | 2018-06-05 | Comcast Cable Communications, Llc | Providing enhanced content based on user interactions |
| JP6685827B2 (ja) * | 2016-05-09 | 2020-04-22 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| WO2017197174A1 (en) | 2016-05-11 | 2017-11-16 | H4 Engineering, Inc. | Apparatus and method for automatically orienting a camera at a target |
| US10564303B2 (en) * | 2016-07-26 | 2020-02-18 | International Business Machines Corporation | Parallel dipole line trap seismometer and vibration sensor |
| CN108297703A (zh) * | 2017-01-11 | 2018-07-20 | 宁波轩悦行电动汽车服务有限公司 | 电动汽车运行保障方法 |
| WO2018164932A1 (en) * | 2017-03-08 | 2018-09-13 | Vid Scale, Inc. | Zoom coding using simultaneous and synchronous multiple-camera captures |
| US11394931B2 (en) * | 2017-03-13 | 2022-07-19 | Sony Group Corporation | Multimedia capture and editing using wireless sensors |
| WO2018177564A1 (en) * | 2017-03-30 | 2018-10-04 | Grau Paniello Sergi | Mounts for mobile devices |
| TWM560035U (zh) * | 2017-11-13 | 2018-05-11 | 鄭宇傑 | 影像追蹤裝置 |
| US10672243B2 (en) * | 2018-04-03 | 2020-06-02 | Chengfu Yu | Smart tracker IP camera device and method |
| US20190340768A1 (en) * | 2018-05-04 | 2019-11-07 | Tti (Macao Commercial Offshore) Limited | System and method of tracking an object |
| JP7146444B2 (ja) * | 2018-05-11 | 2022-10-04 | キヤノン株式会社 | 制御装置、制御方法及びプログラム |
| CN109525752A (zh) * | 2018-06-13 | 2019-03-26 | 幻想动力(上海)文化传播有限公司 | 拍摄设备及拍摄方法 |
| CN109688305A (zh) * | 2018-08-27 | 2019-04-26 | 幻想动力(上海)文化传播有限公司 | 自动拍摄控制方法、装置及计算机可读存储介质 |
| CN109688306A (zh) * | 2018-08-27 | 2019-04-26 | 幻想动力(上海)文化传播有限公司 | 自动拍摄控制方法、装置、系统、设备及计算机可读存储介质 |
| CN109547689A (zh) * | 2018-08-27 | 2019-03-29 | 幻想动力(上海)文化传播有限公司 | 自动拍摄控制方法、装置及计算机可读存储介质 |
| US10939203B2 (en) * | 2019-06-28 | 2021-03-02 | International Business Machines Corporation | Forecasting sound in a live performance to determine microphone position |
| US11711616B2 (en) * | 2020-05-12 | 2023-07-25 | Electroapp, Llc | Portable system including motorized base controller and transmitter for tracking a moving target |
| CN113685682B (zh) * | 2020-05-18 | 2023-02-21 | 北京小米移动软件有限公司 | 一种云台 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002229672A (ja) * | 2001-01-31 | 2002-08-16 | Hitachi Ltd | 携帯情報端末 |
| JP2005295222A (ja) * | 2004-03-31 | 2005-10-20 | Casio Comput Co Ltd | 携帯通信機器 |
| JP2008288151A (ja) * | 2007-05-21 | 2008-11-27 | Casio Hitachi Mobile Communications Co Ltd | 防水端子構造 |
| JP2010511111A (ja) * | 2006-11-27 | 2010-04-08 | コンティネンタル オートモーティブ システムズ ユーエス, インコーポレイティッド | 補強されたキーフォブ |
| JP2011124746A (ja) * | 2009-12-10 | 2011-06-23 | Nec Casio Mobile Communications Ltd | 電子機器及びプログラム |
Family Cites Families (131)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3469148A (en) * | 1967-11-08 | 1969-09-23 | Gen Motors Corp | Protectively covered hybrid microcircuits |
| US4041507A (en) * | 1975-07-02 | 1977-08-09 | W. Haking Industries, Ltd. | Camera for underwater and above water use |
| DE2650524B1 (de) * | 1976-11-04 | 1978-01-12 | Preussag Ag | Unterwasserkamera |
| JPS53164140U (ja) * | 1977-05-30 | 1978-12-22 | ||
| US4814711A (en) | 1984-04-05 | 1989-03-21 | Deseret Research, Inc. | Survey system and method for real time collection and processing of geophysicals data using signals from a global positioning satellite network |
| US4683729A (en) | 1985-06-24 | 1987-08-04 | Rogers Kermett A | Anti-theft apparatus for a riding saddle |
| US4980871A (en) | 1989-08-22 | 1990-12-25 | Visionary Products, Inc. | Ultrasonic tracking system |
| US5179421A (en) | 1990-08-20 | 1993-01-12 | Parkervision, Inc. | Remote tracking system particularly for moving picture cameras and method |
| US5572317A (en) * | 1990-05-31 | 1996-11-05 | Parkervision, Inc. | Remote-controlled tracking system for tracking a remote control unit and positioning and operating a camera and method |
| US5073824A (en) | 1990-06-15 | 1991-12-17 | Vertin Gregory D | Remote control and camera combination |
| US5457370A (en) | 1990-08-08 | 1995-10-10 | Digital Arts Film And Television Pty Ltd | Motion control system for cinematography |
| CA2081041C (en) | 1992-01-03 | 1996-08-06 | Robert Louis Beecher | Camera field of view indicator |
| US5363297A (en) | 1992-06-05 | 1994-11-08 | Larson Noble G | Automated camera-based tracking system for sports contests |
| GB9308952D0 (en) | 1993-04-30 | 1993-06-16 | Philips Electronics Uk Ltd | Tracking objects in video sequences |
| US5463432A (en) | 1993-05-24 | 1995-10-31 | Kahn; Philip | Miniature pan/tilt tracking mount |
| EP0662600A4 (en) | 1993-06-10 | 1997-02-12 | Oh Yoh Keisoku Kenkyusho Kk | DEVICE FOR MEASURING THE POSITION OF A MOVABLE OBJECT. |
| FR2707159B1 (fr) | 1993-07-09 | 1995-09-08 | Peaudouce | Article d'hygiène absorbant jetable. |
| US5438357A (en) | 1993-11-23 | 1995-08-01 | Mcnelley; Steve H. | Image manipulating teleconferencing system |
| EP0660131A1 (en) | 1993-12-23 | 1995-06-28 | Karl Osen | Camera guidance system |
| US5491632A (en) | 1994-05-26 | 1996-02-13 | General Motors Corporation | Rotary encoder with neutral position |
| US6002428A (en) | 1994-10-21 | 1999-12-14 | Sanyo Electric Co., Ltd. | Motion vector detection circuit and object tracking camera device utilizing the same |
| US5640007A (en) | 1995-06-21 | 1997-06-17 | Limitorque Corporation | Optical encoder comprising a plurality of encoder wheels |
| US5912980A (en) | 1995-07-13 | 1999-06-15 | Hunke; H. Martin | Target acquisition and tracking |
| JP4079463B2 (ja) | 1996-01-26 | 2008-04-23 | ソニー株式会社 | 被写体検出装置および被写体検出方法 |
| US6173066B1 (en) | 1996-05-21 | 2001-01-09 | Cybernet Systems Corporation | Pose determination and tracking by matching 3D objects to a 2D sensor |
| US5878151A (en) | 1996-10-31 | 1999-03-02 | Combustion Engineering, Inc. | Moving object tracking |
| BR9805971A (pt) | 1997-02-06 | 1999-08-31 | Koninkl Philips Electronics Nv | Processo e sistema para segmentação e rastreamento de objetos |
| US5973732A (en) | 1997-02-19 | 1999-10-26 | Guthrie; Thomas C. | Object tracking system for monitoring a controlled space |
| GB2324428A (en) | 1997-04-17 | 1998-10-21 | Sharp Kk | Image tracking; observer tracking stereoscopic display |
| US6355881B1 (en) * | 1997-05-05 | 2002-03-12 | Brant P. Braeges | Means for sealing an electronic or optical component within an enclosure housing |
| US6188777B1 (en) | 1997-08-01 | 2001-02-13 | Interval Research Corporation | Method and apparatus for personnel detection and tracking |
| JP3481430B2 (ja) | 1997-09-11 | 2003-12-22 | 富士通株式会社 | 移動体追跡装置 |
| KR100295201B1 (ko) * | 1998-05-25 | 2001-09-17 | 이정훈 | 위치추적중계방송시스템 |
| US6603408B1 (en) * | 1998-06-01 | 2003-08-05 | Brenda Lewellen Gaba | Flexible membrane keyboard |
| US6690978B1 (en) | 1998-07-08 | 2004-02-10 | Jerry Kirsch | GPS signal driven sensor positioning system |
| US6795110B1 (en) * | 1999-06-15 | 2004-09-21 | Philip Kossin | Weatherproof and watertight digital electronic camera, including a solid or fluid-filled digital camera operating at great depths |
| US7920163B1 (en) * | 1999-06-15 | 2011-04-05 | Tessera International, Inc. | Sealed, waterproof digital electronic camera system and method of fabricating same |
| US6172640B1 (en) | 1999-06-18 | 2001-01-09 | Jennifer Durst | Pet locator |
| TW519826B (en) * | 1999-11-29 | 2003-02-01 | Koninkl Philips Electronics Nv | Personality-based intelligent camera system |
| US6596976B2 (en) | 1999-12-07 | 2003-07-22 | American Gnc Corporation | Method and system for pointing and stabilizing a device |
| US6909381B2 (en) | 2000-02-12 | 2005-06-21 | Leonard Richard Kahn | Aircraft collision avoidance system |
| AU2001240100A1 (en) | 2000-03-10 | 2001-09-24 | Sensormatic Electronics Corporation | Method and apparatus for video surveillance with defined zones |
| GB2360972A (en) | 2000-04-05 | 2001-10-10 | Nokia Mobile Phones Ltd | Portable electronic apparatus with a moulded cover |
| US20020005902A1 (en) | 2000-06-02 | 2002-01-17 | Yuen Henry C. | Automatic video recording system using wide-and narrow-field cameras |
| US7006950B1 (en) | 2000-06-12 | 2006-02-28 | Siemens Corporate Research, Inc. | Statistical modeling and performance characterization of a real-time dual camera surveillance system |
| AU2001272980A1 (en) | 2000-06-23 | 2002-01-08 | Sportvision, Inc. | Gps based tracking system |
| EP1168830A1 (en) | 2000-06-30 | 2002-01-02 | Wells & Verne Investments Ltd | Computer aided image capturing system |
| US6519860B1 (en) | 2000-10-19 | 2003-02-18 | Sandia Corporation | Position feedback control system |
| JP4107810B2 (ja) * | 2001-03-21 | 2008-06-25 | 株式会社リコー | 携帯機器用防水ケース |
| GB2373943A (en) | 2001-03-28 | 2002-10-02 | Hewlett Packard Co | Visible and infrared imaging camera |
| GB2373942A (en) | 2001-03-28 | 2002-10-02 | Hewlett Packard Co | Camera records images only when a tag is present |
| US20030169339A1 (en) | 2001-10-01 | 2003-09-11 | Digeo. Inc. | System and method for tracking an object during video communication |
| JP4147054B2 (ja) | 2002-05-17 | 2008-09-10 | オリンパス株式会社 | 立体観察装置 |
| US6751409B2 (en) * | 2002-05-31 | 2004-06-15 | Fuji Photo Film Co., Ltd. | Exterior case of electronic appliance |
| US20040006424A1 (en) | 2002-06-28 | 2004-01-08 | Joyce Glenn J. | Control system for tracking and targeting multiple autonomous objects |
| US6972787B1 (en) | 2002-06-28 | 2005-12-06 | Digeo, Inc. | System and method for tracking an object with multiple cameras |
| US7349008B2 (en) | 2002-11-30 | 2008-03-25 | Microsoft Corporation | Automated camera management system and method for capturing presentations using videography rules |
| KR100507780B1 (ko) | 2002-12-20 | 2005-08-17 | 한국전자통신연구원 | 고속 마커프리 모션 캡쳐 장치 및 방법 |
| US6952646B2 (en) | 2003-05-14 | 2005-10-04 | Chang Industry, Inc. | Tracking device and associated system and method |
| JP2005020205A (ja) | 2003-06-24 | 2005-01-20 | Casio Comput Co Ltd | 画像撮影装置 |
| CA2445814A1 (en) | 2003-10-20 | 2005-04-20 | Colin Wishart | Automated audio/video recording system |
| WO2005039394A2 (en) | 2003-10-23 | 2005-05-06 | Tsx Products Corporation | An apparatus for automatically pointing a device at a target |
| US7081822B2 (en) | 2003-12-18 | 2006-07-25 | Se-Kure Controls, Inc. | Sensing assembly for article to be monitored |
| JP4385768B2 (ja) | 2004-01-09 | 2009-12-16 | 株式会社デンソー | モータ制御装置 |
| JP4414773B2 (ja) * | 2004-01-15 | 2010-02-10 | オリンパス株式会社 | 発音または集音部材の防水滴構造及びこれを有する電子機器 |
| JP4478510B2 (ja) | 2004-06-03 | 2010-06-09 | キヤノン株式会社 | カメラシステム、カメラ、及びカメラの制御方法 |
| US7060921B2 (en) * | 2004-08-25 | 2006-06-13 | Sony Corporation | Water-resistant case for electronic devices |
| US7204107B2 (en) | 2004-08-26 | 2007-04-17 | Se-Kure Controls, Inc. | Adjustable tethering system for securing an article |
| US20080105527A1 (en) | 2004-09-16 | 2008-05-08 | Steven Andrew Leftly | Switches and Devices for Integrated Soft Component Systems |
| US7426338B2 (en) * | 2004-11-29 | 2008-09-16 | Olympus Imaging Corp. | Switch mechanism usable underwater |
| JP4413771B2 (ja) * | 2004-12-28 | 2010-02-10 | Hoya株式会社 | 防水機能を備えたカメラ |
| JP2006243074A (ja) * | 2005-02-28 | 2006-09-14 | Olympus Imaging Corp | 防水ハウジング |
| ES2790885T3 (es) | 2005-03-29 | 2020-10-29 | Sportvu Ltd | Seguimiento de objetos en tiempo real y captura de movimiento en eventos deportivos |
| US7239975B2 (en) | 2005-04-02 | 2007-07-03 | American Gnc Corporation | Method and system for automatic stabilization and pointing control of a device |
| US20080002031A1 (en) * | 2005-05-06 | 2008-01-03 | John-Paul P. Cana | Multi-axis control of a fixed or moving device based on a wireless tracking location of one or many target devices |
| GB0510312D0 (en) | 2005-05-20 | 2005-06-29 | Wearable Technologies Ltd | Garment |
| US7672781B2 (en) | 2005-06-04 | 2010-03-02 | Microstrain, Inc. | Miniaturized wireless inertial sensing system |
| WO2007011648A2 (en) | 2005-07-14 | 2007-01-25 | Huston Charles D | Gps based spectator and participant sport system and method |
| US8471812B2 (en) | 2005-09-23 | 2013-06-25 | Jesse C. Bunch | Pointing and identification device |
| US7728264B2 (en) | 2005-10-05 | 2010-06-01 | Raytheon Company | Precision targeting |
| US20070146484A1 (en) | 2005-11-16 | 2007-06-28 | Joshua Horton | Automated video system for context-appropriate object tracking |
| US7450835B2 (en) | 2005-12-14 | 2008-11-11 | Lackey Robert C | Tripod device for mounting a camera and tracking movable objects |
| US7508352B2 (en) | 2006-01-18 | 2009-03-24 | Motorola, Inc. | Embedded assembly including moveable element and antenna element |
| JP4241742B2 (ja) | 2006-01-31 | 2009-03-18 | パナソニック株式会社 | 自動追尾装置及び自動追尾方法 |
| WO2007119355A1 (ja) | 2006-03-15 | 2007-10-25 | Omron Corporation | 追尾装置、追尾方法、追尾装置の制御プログラム、およびコンピュータ読み取り可能な記録媒体 |
| ES2369495T3 (es) | 2006-03-31 | 2011-12-01 | Checkpoint Systems, Inc. | Sistema para fijar y exponer artículos de promoción. |
| EP2010941B1 (en) | 2006-04-21 | 2010-11-24 | Faro Technologies Inc. | Camera based six degree-of-freedom target measuring and target tracking device with rotatable mirror |
| US20070292118A1 (en) * | 2006-06-14 | 2007-12-20 | Sony Ericsson Mobile Communications Ab | Underwater image capture |
| KR101186608B1 (ko) * | 2006-07-14 | 2012-09-27 | 엘지전자 주식회사 | 이동 통신 단말기 |
| US7843322B2 (en) | 2006-08-14 | 2010-11-30 | Honeywell International Inc. | Instant messaging applications in security systems |
| WO2008024761A2 (en) | 2006-08-21 | 2008-02-28 | Innotec Corporation | Electrical device having boardless electrical component mounting arrangement |
| US7578357B2 (en) | 2006-09-12 | 2009-08-25 | Black & Decker Inc. | Driver with external torque value indicator integrated with spindle lock and related method |
| JP2008227877A (ja) * | 2007-03-13 | 2008-09-25 | Hitachi Ltd | 映像情報処理装置 |
| US7712933B2 (en) | 2007-03-19 | 2010-05-11 | Interlum, Llc | Light for vehicles |
| US8408773B2 (en) * | 2007-03-19 | 2013-04-02 | Innotec Corporation | Light for vehicles |
| US7730852B2 (en) | 2007-05-18 | 2010-06-08 | Kramer Robert H | Portable animal restraint and feeding station |
| RU2463663C2 (ru) | 2007-05-31 | 2012-10-10 | Панасоник Корпорэйшн | Устройство захвата изображения, сервер обеспечения дополнительной информации и система фильтрации дополнительной информации |
| US7933122B2 (en) * | 2007-06-06 | 2011-04-26 | Otter Products, Llc | Protective enclosure for a computer |
| US8230575B2 (en) | 2007-12-12 | 2012-07-31 | Innotec Corporation | Overmolded circuit board and method |
| TWI369135B (en) | 2007-12-31 | 2012-07-21 | Nat Applied Res Lab Nat Ct For High Performance Computing | Camera control system capable of positioning and tracking object in space and method thereof |
| US20090206077A1 (en) * | 2008-02-19 | 2009-08-20 | Daymen Photo Marketing Lp, A Canadian Limited Partnership | Protective Camera Enclosure |
| US7547875B1 (en) | 2008-05-29 | 2009-06-16 | Delta Electronics, Inc. | Absolute type encoder apparatus and method for operating the same |
| US20090300101A1 (en) | 2008-05-30 | 2009-12-03 | Carl Johan Freer | Augmented reality platform and method using letters, numbers, and/or math symbols recognition |
| ES2400310T3 (es) | 2008-06-18 | 2013-04-09 | Saab Ab | Verificación de la validez de la información de posición de un vehículo |
| FR2933511A1 (fr) | 2008-07-04 | 2010-01-08 | Optinnova | Dispositif et procede de visualisation interactif utilisant une camera de detection et un pointeur optique |
| EP2150057A3 (en) | 2008-07-29 | 2013-12-11 | Gerald Curry | Camera-based tracking and position determination for sporting events |
| US8760520B2 (en) | 2008-11-10 | 2014-06-24 | Eduard Levin | System and method for tracking and monitoring personnel and equipment |
| US9141860B2 (en) | 2008-11-17 | 2015-09-22 | Liveclips Llc | Method and system for segmenting and transmitting on-demand live-action video in real-time |
| US8274544B2 (en) | 2009-03-23 | 2012-09-25 | Eastman Kodak Company | Automated videography systems |
| US8237771B2 (en) | 2009-03-26 | 2012-08-07 | Eastman Kodak Company | Automated videography based communications |
| US20100298025A1 (en) * | 2009-05-19 | 2010-11-25 | Cezar Spence | Waterproof cell phone |
| US8374495B2 (en) * | 2009-06-04 | 2013-02-12 | Sanwa Technologies Limited | User-configurable waterproof camera case |
| US8253792B2 (en) | 2009-08-28 | 2012-08-28 | GM Global Technology Operations LLC | Vision system for monitoring humans in dynamic environments |
| KR101048856B1 (ko) | 2009-09-04 | 2011-07-13 | 주식회사 에스원 | 도트 조명을 이용한 영상 침입 감지 시스템 및 방법 |
| JP5514506B2 (ja) | 2009-10-21 | 2014-06-04 | 株式会社日立国際電気 | 侵入物監視システムおよび侵入物監視方法 |
| US9602776B2 (en) | 2010-02-02 | 2017-03-21 | Verizon Patent And Licensing Inc. | Accessing web-based cameras arranged by category |
| WO2011100480A1 (en) | 2010-02-10 | 2011-08-18 | Brian Lamb | Automatic motion tracking, event detection and video image capture and tagging |
| US8953117B2 (en) * | 2010-03-19 | 2015-02-10 | Balboa Water Group, Inc. | Vented waterproof touch screen panel |
| US8294843B2 (en) * | 2010-03-19 | 2012-10-23 | Balboa Instruments, Inc. | Waterproof touch screen panel with protective film |
| US8525340B2 (en) * | 2010-06-11 | 2013-09-03 | Premitec, Inc. | Flexible electronic devices and related methods |
| USD640679S1 (en) * | 2010-10-22 | 2011-06-28 | Otter Products, Llc | Cover for an electronic device |
| TWI448803B (zh) * | 2010-12-31 | 2014-08-11 | Altek Corp | 具防水功能之影像擷取裝置 |
| US20120262618A1 (en) * | 2011-04-14 | 2012-10-18 | Amphibian Labs Llc | Waterproof case for hand held computing device |
| US8995713B2 (en) | 2011-04-25 | 2015-03-31 | Fujitsu Limited | Motion tracking using identifying feature requiring line of sight of camera |
| US8944614B2 (en) * | 2011-04-29 | 2015-02-03 | xDEV, INC. | Protective cover for an electronic device |
| US9025948B2 (en) * | 2011-06-20 | 2015-05-05 | A.G. Findings & Mfg. Co., Inc. | Camera protection module for portable device case |
| TW201303469A (zh) * | 2011-07-14 | 2013-01-16 | Altek Corp | 具有防水功能之相機 |
| US8750674B2 (en) | 2011-09-26 | 2014-06-10 | Intellectual Ventures Fund 83 Llc | Remotely controllable digital video camera system |
| US20130278845A1 (en) | 2012-04-18 | 2013-10-24 | Kent Displays Incorporated | Embedded electrooptical display |
| US9469469B2 (en) * | 2012-06-01 | 2016-10-18 | Treefrog Developments, Inc. | Housing for encasing an object having a thin profile |
| US20140226062A1 (en) * | 2013-02-11 | 2014-08-14 | Matthew B. Parrill | Protective cover for an electronic device |
-
2013
- 2013-03-04 CA CA2866131A patent/CA2866131A1/en not_active Abandoned
- 2013-03-04 EP EP13754983.8A patent/EP2820840A4/en not_active Withdrawn
- 2013-03-04 US US13/784,536 patent/US9313394B2/en active Active
- 2013-03-04 JP JP2014560133A patent/JP2015513858A/ja active Pending
- 2013-03-04 AU AU2013225635A patent/AU2013225635B2/en not_active Ceased
- 2013-03-04 WO PCT/US2013/028933 patent/WO2013131100A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002229672A (ja) * | 2001-01-31 | 2002-08-16 | Hitachi Ltd | 携帯情報端末 |
| JP2005295222A (ja) * | 2004-03-31 | 2005-10-20 | Casio Comput Co Ltd | 携帯通信機器 |
| JP2010511111A (ja) * | 2006-11-27 | 2010-04-08 | コンティネンタル オートモーティブ システムズ ユーエス, インコーポレイティッド | 補強されたキーフォブ |
| JP2008288151A (ja) * | 2007-05-21 | 2008-11-27 | Casio Hitachi Mobile Communications Co Ltd | 防水端子構造 |
| JP2011124746A (ja) * | 2009-12-10 | 2011-06-23 | Nec Casio Mobile Communications Ltd | 電子機器及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2820840A1 (en) | 2015-01-07 |
| AU2013225635A1 (en) | 2014-10-23 |
| US20130230293A1 (en) | 2013-09-05 |
| US9313394B2 (en) | 2016-04-12 |
| WO2013131100A1 (en) | 2013-09-06 |
| EP2820840A4 (en) | 2015-12-30 |
| AU2013225635B2 (en) | 2017-10-26 |
| CA2866131A1 (en) | 2013-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9313394B2 (en) | Waterproof electronic device | |
| JP6227553B2 (ja) | 高品質自動録画のための携帯用システム | |
| US9723192B1 (en) | Application dependent video recording device architecture | |
| US11831983B2 (en) | Portable digital video camera configured for remote image acquisition control and viewing | |
| US9684056B2 (en) | Automatic object tracking camera | |
| AU2013225712B2 (en) | Apparatus and method for automatic video recording | |
| US10048755B2 (en) | Systems and methods for converting sensory data to haptic effects | |
| US20150036047A1 (en) | Orientation control of an image sensor of a portable digital video camera | |
| US20190313020A1 (en) | Mobile Tracking Camera Device | |
| EP2826239A1 (en) | System and method for video recording and webcasting sporting events | |
| US20230388640A1 (en) | Portable system including motorized base controller and transmitter for tracking a moving target | |
| EP3422693A1 (en) | Application dependent video recording device architecture | |
| JP2005277845A (ja) | 撮影制御装置 | |
| WO2020095647A1 (ja) | 画像処理装置、画像処理サーバー、画像処理方法、コンピュータプログラム及び記憶媒体 | |
| JP2009100297A (ja) | 立体画像撮影装置 | |
| JP2022122720A (ja) | 雲台制御装置およびカメラ | |
| TWM459641U (zh) | 目標自動追蹤系統 | |
| JPH05103247A (ja) | 無人撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170328 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171031 |