JP2015114177A - 駆動プロファイルの作成方法、および処理装置 - Google Patents
駆動プロファイルの作成方法、および処理装置 Download PDFInfo
- Publication number
- JP2015114177A JP2015114177A JP2013255560A JP2013255560A JP2015114177A JP 2015114177 A JP2015114177 A JP 2015114177A JP 2013255560 A JP2013255560 A JP 2013255560A JP 2013255560 A JP2013255560 A JP 2013255560A JP 2015114177 A JP2015114177 A JP 2015114177A
- Authority
- JP
- Japan
- Prior art keywords
- reference body
- subject
- drive
- drive profile
- profile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
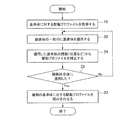
【課題】処理時に駆動する部分の駆動プロファイルを簡易的に作成するのに有利な駆動プロファイル作成方法を提供する。【解決手段】被検体に対して所定の処理を行う処理ヘッドの駆動プロファイルを作成する方法であって、基準体の形状に合わせた位置および姿勢の情報を含む基準体に対する駆動プロファイルを取得する第1工程19と、基準体の位置および姿勢を変更しながら、基準体を被検体の一部分に適用する第2工程20と、第2工程で適用された基準体の位置および姿勢に基づいて、基準体に対する駆動プロファイルを補正して、被検体の一部分に対する処理ヘッドの駆動プロファイルを作成する第3工程21と、被検体の複数の部分に対して第2工程および第3工程を行うことにより、被検体の複数の部分に対する処理ヘッドの複数の駆動プロファイルを作成する第4工程23とを含む。【選択図】図2
Description
本発明は、駆動プロファイルの作成方法、および処理装置に関する。
従来、処理装置として、被検体上でプローブを走査し、被検体の形状を計測する計測装置がある。このような計測装置では、形状計測に際し、予め装置を効率良く動作させるための計画がなされる。装置動作の計画法としては、まず、作業者が、予めプローブの駆動プロファイルを別途作成して計測装置に保存しておき、計測装置が、形状計測の際にこれを読み出して利用する方法がある。この方法は、特に被検体の形状が単純である場合に用いられ得る。もう一つの装置動作の計画法として、特許文献1は、処理装置としての加工装置に適用されるものであり、加工位置を矩形に分割する工程と、矩形内の総加工時間が最小となるように加工順序および動作速度を最適化する工程とを有する計画法を開示している。この方法は、処理装置内の制御部(演算部)が実行し、特に被検体の形状が複雑である場合に用いられ得る。
しかしながら、被検体の形状が部分的には単純であっても、その単純形状を複数組み合せたような形状である場合には、作業者が駆動プロファイルを別途作成するには負荷が大きい。一方、特許文献1に示す計画法では、駆動プロファイルを作成するための演算のデータ準備やその演算自体に時間がかかる。
本発明は、このような状況に鑑みてなされたものであり、例えば、処理時に駆動する部分の駆動プロファイルを簡易的に作成するのに有利な駆動プロファイル作成方法を提供することを目的とする。
上記課題を解決するために、本発明は、被検体に対して所定の処理を行う処理ヘッドの駆動プロファイルを作成する方法であって、基準体の形状に合わせた位置および姿勢の情報を含む基準体に対する駆動プロファイルを取得する第1工程と、基準体の位置および姿勢を変更しながら、基準体を被検体の一部分に適用する第2工程と、第2工程で適用された基準体の位置および姿勢に基づいて、基準体に対する駆動プロファイルを補正して、被検体の一部分に対する処理ヘッドの駆動プロファイルを作成する第3工程と、被検体の複数の部分に対して第2工程および第3工程を行うことにより、被検体の複数の部分に対する処理ヘッドの複数の駆動プロファイルを作成する第4工程とを含むことを特徴とする。
本発明によれば、例えば、処理時に駆動する部分の駆動プロファイルを簡易的に作成するのに有利な駆動プロファイル作成方法を提供することができる。
以下、本発明を実施するための形態について図面などを参照して説明する。
(第1実施形態)
まず、本発明の第1実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルは、例えば、被検体の形状を接触もしくは非接触で計測する計測装置や、被検体を接触または非接触で加工する加工装置など、所定の処理を行う処理装置に適用される。以下、本実施形態では、被検体(被計測物)の形状を非接触で計測する計測装置に適用される駆動プロファイルを作成する方法について例示する。
まず、本発明の第1実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルは、例えば、被検体の形状を接触もしくは非接触で計測する計測装置や、被検体を接触または非接触で加工する加工装置など、所定の処理を行う処理装置に適用される。以下、本実施形態では、被検体(被計測物)の形状を非接触で計測する計測装置に適用される駆動プロファイルを作成する方法について例示する。
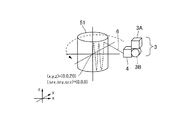
図1は、本実施形態に係る駆動プロファイルを適用し得る計測装置10の構成を示す概略図である。計測装置10は、定盤1と、計測ヘッド4と、XYZステージ2と、回転ステージ3と、制御部7とを備える。計測装置10は、計測ヘッド4を被検体5に対して移動させながら3次元計測を可能とする。なお、以下の各図において、被検体5が定盤1に載置された状態での平面内に互いに直交するX軸およびY軸を取り、このXY平面に垂直(本実施形態では鉛直方向)にZ軸を取っている。定盤1は、被検体5を載置し、XYZステージ2を支持する。計測ヘッド(処理ヘッド)4は、いわゆる非接触式プローブであり、被検体5に対して光を投受光し、すなわち、被検体5に向けて被検光束6を照明し、被検体5からの反射光または散乱光を検出することにより、被検体5との間の距離を計測する。計測ヘッド4は、その内部に、不図示の2つのガルバノミラー(第3駆動部)を備え、被検光束6を2次元状に照明可能とする。以下、ガルバノミラーで走査される被検光束6の走査方向を、第1のガルバノミラーでx軸方向(ωy)、第2のガルバノミラーでy軸方向(ωx)とする。XYZステージ(第1駆動部)2は、計測ヘッド4を、回転ステージ3を介して保持しつつ、回転ステージ3および計測ヘッド4をXYZの各軸方向に移動可能とする。回転ステージ(第2駆動部)3は、計測ヘッド4をZ軸およびY軸の2軸を中心に回転可能とする。
制御部7は、XYZステージ2の座標、回転ステージ3と各ガルバノミラーとのそれぞれの角度、ならびに計測ヘッド4による測長値の結果に基づいて、被検体5の形状を演算により求める。ここで、制御部7は、計測ヘッド4による計測前に、駆動プロファイル、具体的には、XYZステージ2、回転ステージ3、およびガルバノミラーの各駆動に関するプロファイルを求める。実際の計測の際には、制御部7は、駆動プロファイルに基づいて、計測ヘッド4が被検体5の計測部分を照明可能とする上記座標および各角度の駆動指令値を演算し、計測ヘッド4を計測させつつ所望の経路で移動(走査)させる。そして、本実施形態では、駆動プロファイルを、被検体5の形状情報をCADや粗形状計測により予め取得し、その上で、以下に示す方法により作成する。
図2は、本実施形態に係る駆動プロファイルを作成する流れを示すフローチャートである。まず、制御部7は、単純形状である基準体の形状に合わせた位置、姿勢、または大きさの情報を含む、基準体に対する駆動プロファイルを取得する(ステップS19:第1工程)。この基準体に対する駆動プロファイルは、取得後、その形状ごとに制御部7内の記憶装置に保存される。次に、制御部7は、被検体5の一部分に、基準体の全体を適用する(ステップS20:第2工程)。ここで、「適用」とは、計測装置10のΔZ(計測の許容深度)内で、被検光束6の照明箇所を測長可能な範囲(光束走査長を超えない範囲)で、被検体5の一部に基準体の全体を当てはめることをいう。なお、被検光束6の照明可能な範囲は、ガルバノミラーや回転ステージ3の駆動可能な最大角度で制限され、測長可能な範囲は、計測ヘッド4の計測可能条件(入射対応角、表面粗さなど)で制限される。次に、制御部7は、基準体の適用時の情報(位置、姿勢、大きさなど)に基づいて、適用後の基準体に対する駆動プロファイルを補正し、被検体5の一部分に対する計測ヘッド4の駆動プロファイルを作成する(ステップS21:第3工程)。具体的には、制御部7は、予め保存されている基準体に対する駆動プロファイルを上記の適用時の情報に基づいて1次変換することで、適用後の基準体に対する駆動プロファイルを演算する。次に、制御部7は、ステップS20からステップS21までの工程が、被検体5の被計測領域(被処理領域)の全体に適用されたかどうかを判断し、まだ適用されていない場合には(No)、適用された(Yes)と判断するまで繰り返す。制御部7は、この繰り返しにより、被検体5の被計測領域、すなわち被検体5の複数の部分に適用し得る複数の基準体に対する駆動プロファイルを作成する(ステップS22:第4工程の一部)。そして、制御部7は、ステップS22までの工程で作成した複数の基準体に対する駆動プロファイルを組み合わせることで1つの駆動プロファイルとし、これを被検体5に対する駆動プロファイルとする(ステップS23:第4工程の一部)。
次に、被検体5に対する駆動プロファイルを作成する具体的な方法として、形状が円筒である基準体を用いる場合について例示する。まず、被検体5に対する駆動プロファイルの作成に用いるための基準体に対する駆動プロファイルの作成方法について説明する。図3は、この場合の駆動プロファイルの作成方法に関し、円筒形状の基準体51の形状計測を説明するための斜視図である。制御部7は、まず、計測ヘッド4に基準体51の側面を計測させる。この計測の際、制御部7は、計測ヘッド4内のガルバノミラーで被検光束6をZ軸方向に往復走査させつつ、図中破線矢印で示すようにXYZステージ2で計測ヘッド4を基準体51の周りを周回させる。また、計測ヘッド4の向きを変更可能する回転ステージ3は、ωz軸用の第1回転部3Aとωy軸用の第2回転部3Bとの2軸用の回転部を備え、計測時には、計測ヘッド4が常に基準体51側を向くように第1回転部3Aを回転させる。
ここで、計測ヘッド4が基準体51の周りを角速度ωvで回転すると想定する。このとき、XYZステージ2の座標PF0=(PFx,PFy,PFz)、回転ステージ3の角度(Rot1,Rot2)、およびガルバノミラーの角度(Gal1,Gal2)のそれぞれの駆動指令値は、以下の式(1)から式(7)で表される。なお、以下、式(1)から式(7)までを総称して「第1式群」という。
PFx=(R+WD)COS(ωv×t) (1)
PFy=(R+WD)SIN(ωv×t) (2)
PFz=Z0 (一定値) (3)
Rot1=ωv×t (4)
Rot2=π/2 (一定値) (5)
Gal1=±Gv×t (6)
正:2NA<t<(2N+1)A
負:(2N+1)A<t<2(N+1)A
ただし、Nは整数、A=p/(2Rωv)
Gal2=0 (一定値) (7)
PFx=(R+WD)COS(ωv×t) (1)
PFy=(R+WD)SIN(ωv×t) (2)
PFz=Z0 (一定値) (3)
Rot1=ωv×t (4)
Rot2=π/2 (一定値) (5)
Gal1=±Gv×t (6)
正:2NA<t<(2N+1)A
負:(2N+1)A<t<2(N+1)A
ただし、Nは整数、A=p/(2Rωv)
Gal2=0 (一定値) (7)
ただし、Gvはガルバノミラーの回転速度、pは基準体51表面の計測ピッチ、またtは時間である。制御部7は、計測装置10のサンプリングレートごとに上記の各駆動部の駆動プロファイルの具体的な値を求める。なお、回転ステージ3の角度に制限がある場合には、計測ヘッド4の周回方向を適宜逆(正の方向と負の方向とを逆)として駆動プロファイルを作成してもよい。
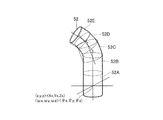
次に、上記のように予め準備した基準体51に対する駆動プロファイルを用いて、被検体の全体に対する駆動プロファイルを作成する方法について、図2のフローチャートに沿って説明する。図4は、本実施形態における被検体52(図1でいう被検体5)の形状、および被検体52に基準体51を適用する状態を示す斜視図である。被検体52は、全体的には軸方向に長い円筒であるが、その一方の先端部が湾曲した形状を有する。
まず、制御部7は、図2のステップS20として、被検体52の一部に基準体51(の全体)を適用し、基準体51に対する駆動プロファイルから、被検体52の一部を計測ヘッド4に計測させるための駆動プロファイルを求める。ここで、図4に示す被検体52の一部に近似する近似円筒52Aは、被検体52の一部が計測可能となるように、基準体51を当てはめたものである。この部分では、被検体52の一部と基準体51との形状(大きさ)がほぼ同等であるので、上記の第1式群の駆動プロファイルをそのまま用いることができる。しかしながら、被検体52の一部と基準体51との形状に相違がある場合、具体的には、例えば、基準体51と被検体52との半径の差が計測装置10のΔZ以上の場合には、第1式群の駆動プロファイルでは計測不可能となり、そのまま用いることができない。そこで、この場合には、制御部7は、第1式群を構成する各式を以下のように変更する。ここで、近似円筒52Aの半径をRsとすると、XYZステージ2の駆動指令値を表す式(1)および式(2)は、以下の式(8)および式(9)となる。
PFx=(Rs+WD)COS(ωv×t) (8)
PFy=(Rs+WD)SIN(ωv×t) (9)
そして、制御部7は、式(8)および式(9)の各Rsに被検体52の半径を代入することで、計測ヘッド4の駆動軌跡の半径を再演算する。例えば、ΔZが10mmで、基準体51と被検体52との半径がそれぞれ100mmと200mmとである場合、半径の差がΔZ以上のため、各Rsに200を代入する。これにより、近似円筒52Aを計測する計測ヘッド4の駆動軌跡の半径は、基準体51の計測時よりも100mm外側となる。なお、この場合に第1式群を変更する方法として、式(8)および式(9)の各Rsに被検体52の半径を代入する方法に代えて、予め計測装置10のΔZごとに基準体51に対する駆動プロファイルを準備し用いるものとしてもよい。
PFx=(Rs+WD)COS(ωv×t) (8)
PFy=(Rs+WD)SIN(ωv×t) (9)
そして、制御部7は、式(8)および式(9)の各Rsに被検体52の半径を代入することで、計測ヘッド4の駆動軌跡の半径を再演算する。例えば、ΔZが10mmで、基準体51と被検体52との半径がそれぞれ100mmと200mmとである場合、半径の差がΔZ以上のため、各Rsに200を代入する。これにより、近似円筒52Aを計測する計測ヘッド4の駆動軌跡の半径は、基準体51の計測時よりも100mm外側となる。なお、この場合に第1式群を変更する方法として、式(8)および式(9)の各Rsに被検体52の半径を代入する方法に代えて、予め計測装置10のΔZごとに基準体51に対する駆動プロファイルを準備し用いるものとしてもよい。
次に、制御部7は、図2のステップS21として、適用後の基準体51に対する駆動プロファイルを補正する。ここで、基準体51は、初期状態では、図3に示すように位置(X,Y,Z)が原点(0,0,Z0)にあり、角度(ωx、ωy、ωz)が(0,0,0)であるものとする。これに対して、近似円筒52Aは、基準体51の初期状態から、位置(Xs、Ys、Zs)分移動し、角度(θx、θy、θz)分変更されて被検体52の一部に当てはめられ、その結果、計測ヘッド4により計測可能となる。このとき、XYZステージ2の駆動プロファイルPF1=(PFx1、PFy1、PFz1)は、以下の式(10)で表されるように、1次変換で変更される。
また、回転ステージ3の駆動指令値である角度RotS1=(Rot1a、Rot2a)も、計測ヘッド4が近似円筒52Aを計測可能とするために、以下の式(11)および式(12)で表されるように変更される。
Rot1a=ωv×t (11)
Rot2a=π/2+θxCOS(ωv×t−θz)+θySIN(ωv×t−θz)
(12)
なお、計測ヘッド4と被検体52との相対関係は、XYZステージ2と回転ステージ3で一定に維持し得る。したがって、第1のガルバノミラーの駆動指令値GalS1については、式(6)および式(7)のままとしても、計測ヘッド4は、近似円筒52Aを計測可能である。
Rot1a=ωv×t (11)
Rot2a=π/2+θxCOS(ωv×t−θz)+θySIN(ωv×t−θz)
(12)
なお、計測ヘッド4と被検体52との相対関係は、XYZステージ2と回転ステージ3で一定に維持し得る。したがって、第1のガルバノミラーの駆動指令値GalS1については、式(6)および式(7)のままとしても、計測ヘッド4は、近似円筒52Aを計測可能である。
次に、制御部7は、図2のステップS22として、ステップS20からステップS21までの工程が、被検体52の被計測領域の全体に適用されたかどうかを判断し、まだ適用されていない場合には、適用されるまで繰り返す。ここで、制御部7は、被検体52の全体に適用されたかどうかを、駆動指令値から演算される計測予定点と、被検体52の被計測領域全体の形状データとの差分値に基づいて判断する。具体的には、上記の工程まででは、被検体52の一部に対して近似円筒52Aが適用されたので、制御部7は、以後の繰り返しにより、被検体52の残りの一部に他の近似円筒52B〜52Eを繰り返し適用していく。そして、制御部7は、繰り返しの度に、順次、各近似円筒52B〜52Eを計測するためのXYZステージ2の駆動指令値PF2〜PF5、回転ステージ3の駆動指令値RotS2〜RotS5、ガルバノミラーの駆動指令値GalS2〜GalS5を演算する。なお、被検体52の湾曲部に基準体51を当てはめた近似円筒52C〜52Eは、その円筒の高さが基準体51のままでは被計測領域が隣り合う円筒と重なる。そこで、円筒形状をそのまま当てはめると重なる部分が大きい場合には、図4に示すように、それぞれの適用の繰り返しの際のステップS20において、例えば、ガルバノミラーの角度の範囲を制限するなどして、円筒の高さを短くする。
次に、制御部7は、図2のステップS23として、上記の工程までで作成した複数の基準体51に対する駆動プロファイルを組み合わせる。具体的には、制御部7は、XYZステージ2の駆動指令値PF1からPF5までと、回転ステージ3の駆動指令値RotS1からRotS5までと、ガルバノミラーの駆動指令値GalS1からGalS5までをそれぞれ接続する。ここで、回転ステージ3の駆動指令値について、RotS(n)(nは1〜4の任意の数、以下同様)の最後の角度が360度(2π)で、RotS(n+1)の最初の角度が0度となるような場合があり得る。このように、RotS(n+1)の最初の角度に360度オフセットを加えた方が、回転ステージ3の駆動指令値の角度の差が少なくなる場合には、そのようにオフセットを加えてもよい。具体的には、組み合わされる隣り合う基準体51の一方の終了点と、他方の開始点との回転ステージ3の角度の差がπ以上のときに、一方の基準体51に対する駆動プロファイルの角度に、360度または−360度のオフセットを加える。例えば、回転ステージ3の第1回転部3Aの最大角度が720度で、近似円筒52Aの計測終了時の角度が360度である場合には、制御部7は、近似円筒52Bの最初の角度に360度を加算する。また、回転ステージ3の角度に最大値の制限がある場合は、回転ステージ3の回転速度ωvの符号が負の駆動指令値を採用し、角度が最大値を超えないようにする必要がある。例えば、回転ステージ3の第1回転部3Aの最大角度が720度で、近似円筒52Aの計測終了時の角度が720度である場合には、制御部7は、近似円筒52Bの回転ステージ3の回転方向が負の方向の駆動プロファイルを採用する。
このように、被検体5の形状が単純形状ではない場合でも、予め単純形状の基準体に対する駆動プロファイルを準備し、これらを適宜組み合わせることで、被検体5に対する駆動プロファイルを簡易的に作成することが可能となる。また、駆動プロファイルの作成にあたり、被検体5の形状の複雑さに依拠するところが少ないため、作業者に対して多大な負担を要求することもない。
以上のように、本実施形態によれば、処理時に駆動する部分の駆動プロファイルを簡易的に作成するのに有利な駆動プロファイル作成方法を提供することができる。
(第2実施形態)
次に、本発明の第2実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、上記第1実施形態と同様に円筒形状の基準体51を用いるが、その基準体51の形状計測の方法を第1実施形態における方法から変更する点にある。
次に、本発明の第2実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、上記第1実施形態と同様に円筒形状の基準体51を用いるが、その基準体51の形状計測の方法を第1実施形態における方法から変更する点にある。
図5は、基準体51に対する駆動プロファイルの作成方法に関し、本実施形態における円筒形状の基準体51の形状計測を説明するための斜視図である。制御部7は、計測ヘッド4に基準体51の側面を計測させるが、この計測の際、本実施形態では、図中破線矢印で示すようにXYZステージ2で計測ヘッド4をZ軸に平行に移動させつつ、ガルバノミラーで被検光束6をXY平面に平行に走査させる。
このとき、XYZステージ2の座標PF0=(PFx,PFy,PFz)、回転ステージ3の角度(Rot1,Rot2)、およびガルバノミラーの角度(Gal1,Gal2)のそれぞれの駆動指令値は、以下の式(13)から式(19)で表される。特に本実施形態では、制御部7は、ガルバノミラーの走査角度または計測ヘッド4の計測可能な最大入射角度から求められる被検光束6の走査幅に基づいて、基準体51を放射状にN個に分割する。ここで、分割した円弧の1つ(i番目)の側面を計測するときには、式(15)および式(19)以外は、計測中一定値である。なお、以下、式(15)および式(19)を総称して「第2式群」という。
PFx=(R+WD)COS(i/2πN) (i=0〜N) (13)
PFy=(R+WD)SIN(i/2πN) (i=0〜N) (14)
PFz=PFv×t (15)
Rot1=i/2πN (i=0〜N) (16)
Rot2=π/2 (17)
Gal1=0 (18)
Gal2=±Gv×t (19)
正:2NA<t<(2N+1)A
負:(2N+1)A<t<2(N+1)A
ただし、Nは整数、A=p/(2PFv)
PFx=(R+WD)COS(i/2πN) (i=0〜N) (13)
PFy=(R+WD)SIN(i/2πN) (i=0〜N) (14)
PFz=PFv×t (15)
Rot1=i/2πN (i=0〜N) (16)
Rot2=π/2 (17)
Gal1=0 (18)
Gal2=±Gv×t (19)
正:2NA<t<(2N+1)A
負:(2N+1)A<t<2(N+1)A
ただし、Nは整数、A=p/(2PFv)
ただし、PFvはXYZステージ2の駆動速度である。制御部7は、第2式群の各式に基づいて、分割した円弧のi番目を計測ヘッド4に計測させる。この計測が終了後、制御部7は、第2式群以外の各式の駆動軸を、iをインクリメントした次の駆動プロファイルに移動させる。そして、制御部7は、再び第2式群の各式に基づいて、XYZステージ2のZ軸方向および第2のガルバノミラーを駆動し、順次円筒の側面を計測させる。なお、XYZステージ2のZ軸方向への駆動方向は、正の方向に限らず負の方向としてもよい。以下、基準体51に対する駆動プロファイルを1次変換して補正する方法については、「ωv×t」を「i/2πN」に置換する以外、第1実施形態と同様であるので、説明を省略する。本実施形態によれば、基準体51の形状計測の方法を第1実施形態とは異なるものとしても、第1実施形態と同様の効果を奏する。
(第3実施形態)
本発明の第3実施形態に係る駆動プロファイルの作成方法について説明する。上記の各実施形態では、円筒形状の基準体を用いる場合を説明したが、本実施形態に係る駆動プロファイルの作成方法の特徴は、円筒形状の基準体に代えて、直方体形状の基準体を用いる点にある。本実施形態では、直方体形状の基準体に対する駆動プロファイルを作成する前に、まず、平面形状の駆動プロファイルを作成する。
本発明の第3実施形態に係る駆動プロファイルの作成方法について説明する。上記の各実施形態では、円筒形状の基準体を用いる場合を説明したが、本実施形態に係る駆動プロファイルの作成方法の特徴は、円筒形状の基準体に代えて、直方体形状の基準体を用いる点にある。本実施形態では、直方体形状の基準体に対する駆動プロファイルを作成する前に、まず、平面形状の駆動プロファイルを作成する。
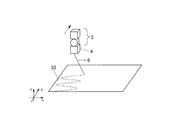
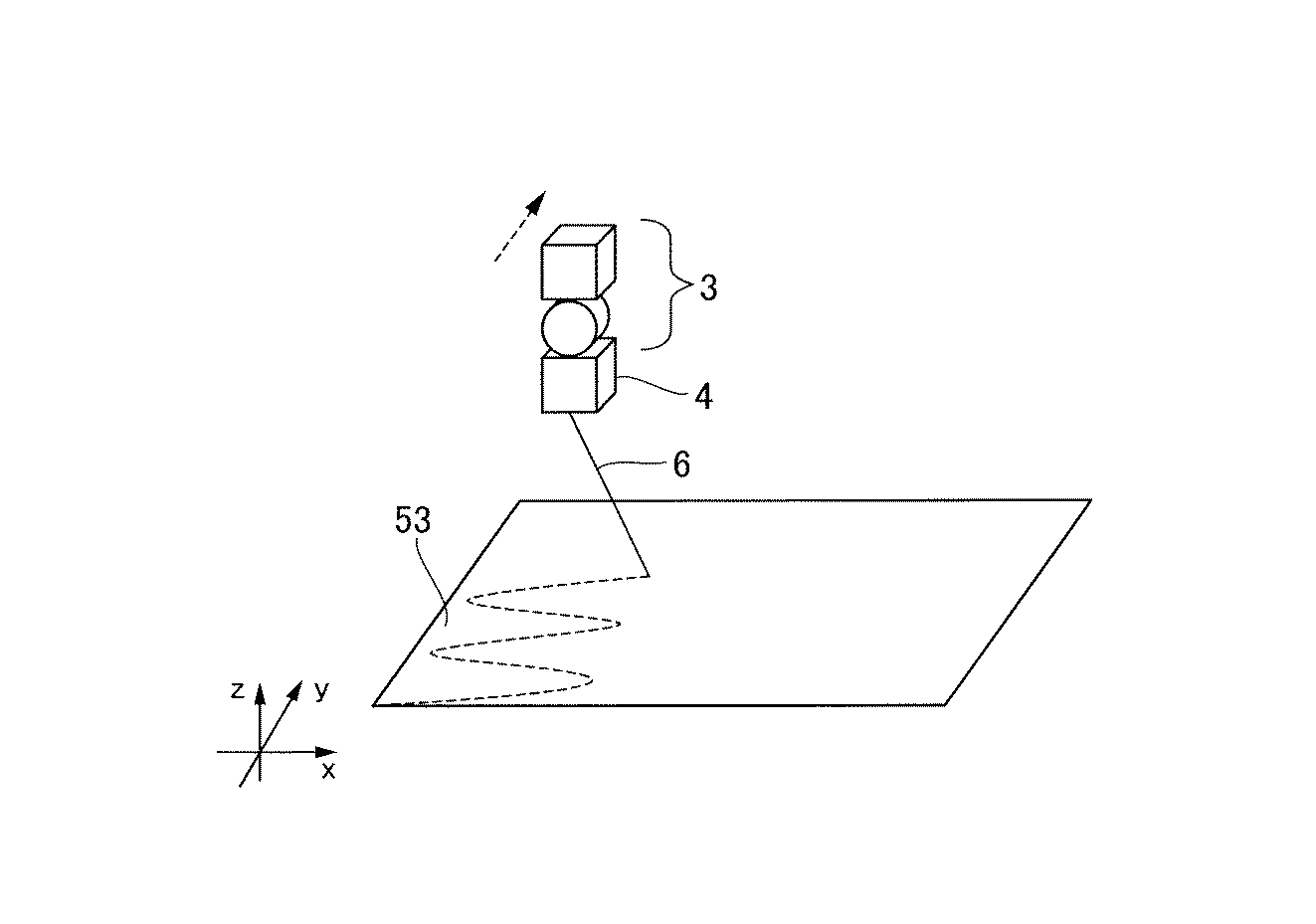
図6は、平面53の駆動プロファイルの作成方法に関し、本実施形態における平面53の形状計測を説明するための斜視図である。ここで、平面53は、XY平面に平行に配置されているものと想定する。制御部7は、計測ヘッド4に平面53を計測させるが、この計測の際、図中破線矢印で示すようにXYZステージ2で計測ヘッド4をY軸方向に移動させつつ、第2のガルバノミラーで被検光束6をX軸方向に平行に走査させる。
このとき、XYZステージ2の座標PF0=(PFx,PFy,PFz)のうちのPFy、およびガルバノミラーのうちの第2のガルバノミラーの角度Gal2のそれぞれの駆動指令値は、以下の式(20)と式(21)とで表される。
PFy=PFv×t (20)
Gal2=±Gv×t (21)
正:2NB<t<(2N+1)B
負:(2N+1)B<t<2(N+1)B
ただし、Nは整数、B=p/(2Rωz)
PFy=PFv×t (20)
Gal2=±Gv×t (21)
正:2NB<t<(2N+1)B
負:(2N+1)B<t<2(N+1)B
ただし、Nは整数、B=p/(2Rωz)
なお、上記以外の駆動軸に関する駆動指令値は一定値である。また、この計測では計測ヘッド4をY軸方向に移動させる場合を想定したが、計測ヘッド4をX軸方向に移動させるとともに、駆動軸をPFxおよび第1のガルバノミラーに変更して被検光束6をY軸方向に走査させてもよい。さらに、この計測ではXYZステージ2で計測ヘッド4を移動させつつ、ガルバノミラーで被検光束6を走査する場合を想定したが、2つのガルバノミラーで被検光束6を平面53上に走査させてもよい。
以下、平面53の駆動プロファイルを1次変換して補正する方法については、XYZステージ2に関しては第1実施形態と同様であるので、説明を省略する。一方、回転ステージ3に関しては、角度(Rot1,Rot2)で一定であり、平面53の傾きが(θx、θy、θz)のとき、その角度(Rot1a,Rot2a)の駆動指令値は、以下の式(22)と式(23)とで表される。
Rot1a=arctan(tanθy/tanθx)+θz (22)
Rot2a=arctan((tanθx)2+(tanθy)2)1/2 (23)
Rot1a=arctan(tanθy/tanθx)+θz (22)
Rot2a=arctan((tanθx)2+(tanθy)2)1/2 (23)
次に、平面53を組み合わせた直方体形状の基準体54に対する駆動プロファイルの作成方法について説明する。図7は、基準体54に対する駆動プロファイルの作成方法に関し、本実施形態における基準体54の形状計測を説明するための斜視図である。ここで、基準体54は、側面がXZ平面とYZ平面とに平行に配置されているものと想定する。制御部7は、計測ヘッド4に基準体54を計測させるが、この計測の際、図中破線矢印で示すように計測ヘッド4をZ軸を基準として周回させる。そして、制御部7は、基準体54の各平面の計測に用いる駆動プロファイルとして、上記作成した平面53の駆動プロファイルを用いる。この計測の際、制御部7は、平面53の駆動プロファイルのうち、第2のガルバノミラーによる走査方向をZ軸と平行とし、XYZステージ2に関してはPFxとPFyとで計測ヘッド4を移動させる。そして、制御部7は、各平面の駆動プロファイルを組み合わせる(接続する)ことで、直方体の各平面の計測プロファイルを作成する。
このとき、それぞれの駆動指令値は、以下の式(24)から式(30)で表される。
面54C:PFx=PFv×t (24)
Rot1=0 (25)
Rot2=π/2 (26)
面54D:PFy=PFv×t (27)
Rot1=π/2 (28)
Rot2=π/2 (29)
全平面共通:Gal1=±Gv×t (30)
正:2NB<t<(2N+1)B
負:(2N+1)B<t<2(N+1)B
ただし、Nは整数、B=p/(2PFv))
なお、上記の面54Cと面54Dとのいずれかに対向する他の平面を計測する際には、XYZステージ2の駆動速度PFvと回転ステージ3の角度Rot1、Rot2との符号が反転する。
面54C:PFx=PFv×t (24)
Rot1=0 (25)
Rot2=π/2 (26)
面54D:PFy=PFv×t (27)
Rot1=π/2 (28)
Rot2=π/2 (29)
全平面共通:Gal1=±Gv×t (30)
正:2NB<t<(2N+1)B
負:(2N+1)B<t<2(N+1)B
ただし、Nは整数、B=p/(2PFv))
なお、上記の面54Cと面54Dとのいずれかに対向する他の平面を計測する際には、XYZステージ2の駆動速度PFvと回転ステージ3の角度Rot1、Rot2との符号が反転する。
次に、基準体54を組み合せて被検体55を計測する際の駆動プロファイルの作成方法について説明する。図8は、本実施形態における被検体55(図1でいう被検体5)の形状と、被検体55に基準体54を適用する状態とを示す斜視図である。被検体55は、全体的には軸方向に長い四角柱であるが、その一方の先端部が傾いた形状を有する。具体的に基準体54を用いて被検体55の駆動プロファイルを作成する方法は、基本的には第1実施形態と同様である。制御部7は、被検体55の一部に近似直方体55Aを当てはめて1次変換することで駆動プロファイルを補正する。そして、制御部7は、繰り返し近似直方体55B〜55Cを被検体55に当てはめていき、最終的に、作成した駆動プロファイルを組み合わせることで被検体55の全体に対する駆動プロファイルを作成する。
本実施形態によれば、被検体55の形状が直方体であっても、第1実施形態で説明したような駆動プロファイルを作成することができ、結果的に、第1実施形態と同様の効果を奏する。なお、本実施形態では、被検体55の形状が直方体であるとして説明したが、例えば、多角錐のような複数の平面で構成されるその他の形状である場合にも同様に応用できる。
(第4実施形態)
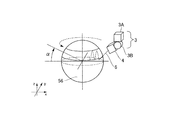
次に、本発明の第4実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、さらに上記各実施形態の場合とは基準体の形状を代えて、球形状の基準体を用いる点にある。図9は、基準体56に対する駆動プロファイルの作成方法に関し、本実施形態における基準体56の形状計測を説明するための斜視図である。ここで、制御部7は、計測ヘッド4をZ軸を中心に周回させ、回転ステージ3の第2回転部3Bの角度制限から、計測ヘッド4に基準体56の上半球の面のみを計測させるものとする。この計測の際の駆動プロファイルは、計測部分の緯度により回転ステージ3の第2回転部3Bの駆動指令値である角度Rot2が変わる以外は、第1実施形態における円筒計測の場合と同じとなる。このとき、回転ステージ3の角度Rot2は、基準体56に対する計測ヘッド4の走査の中心の緯度をαとすると、以下の式(31)で表される。
Rot2=π/2−α (31)
そして、基準体56に対する駆動プロファイルを1次変換し新たな駆動プロファイルに補正する方法については、第1実施形態と同様である。ただし、球は点対象であるため、第1実施形態で説明した方法に代えて、1次変換せずに、式(31)と、式(5)以外の第1式群をそのまま次工程に用いてもよい。本実施形態によれば、図1でいう被検体5の形状が球である場合にも、このような基準体56を用いることで、第1実施形態と同様の効果を奏する。
次に、本発明の第4実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、さらに上記各実施形態の場合とは基準体の形状を代えて、球形状の基準体を用いる点にある。図9は、基準体56に対する駆動プロファイルの作成方法に関し、本実施形態における基準体56の形状計測を説明するための斜視図である。ここで、制御部7は、計測ヘッド4をZ軸を中心に周回させ、回転ステージ3の第2回転部3Bの角度制限から、計測ヘッド4に基準体56の上半球の面のみを計測させるものとする。この計測の際の駆動プロファイルは、計測部分の緯度により回転ステージ3の第2回転部3Bの駆動指令値である角度Rot2が変わる以外は、第1実施形態における円筒計測の場合と同じとなる。このとき、回転ステージ3の角度Rot2は、基準体56に対する計測ヘッド4の走査の中心の緯度をαとすると、以下の式(31)で表される。
Rot2=π/2−α (31)
そして、基準体56に対する駆動プロファイルを1次変換し新たな駆動プロファイルに補正する方法については、第1実施形態と同様である。ただし、球は点対象であるため、第1実施形態で説明した方法に代えて、1次変換せずに、式(31)と、式(5)以外の第1式群をそのまま次工程に用いてもよい。本実施形態によれば、図1でいう被検体5の形状が球である場合にも、このような基準体56を用いることで、第1実施形態と同様の効果を奏する。
(第5実施形態)
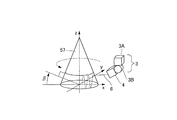
次に、本発明の第5実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、さらに上記各実施形態の場合とは基準体の形状を代えて、円錐体形状の基準体を用いる点にある。図10は、基準体57に対する駆動プロファイルの作成方法に関し、本実施形態における基準体57の形状計測を説明するための斜視図である。ここで、制御部7は、計測ヘッド4をZ軸を中心に周回させ、回転ステージ3の第2回転部3Bの角度制限から、計測ヘッド4に基準体57の側面(円錐面)のみを計測させるものとする。この計測の際の駆動プロファイルは、回転ステージ3の第2回転部3Bの駆動指令値である角度Rot2が変わる以外は、第1実施形態における円筒計測の場合と同じとなる。このとき、回転ステージ3の角度Rot2は、基準体57の法線とXY平面との角度をβとすると、以下の式(32)で表される。
Rot2=π/2−β (32)
そして、基準体57に対する駆動プロファイルを1次変換し新たな駆動プロファイルに補正する方法についても、第1実施形態と同様である。本実施形態によれば、図1でいう被検体5の形状が円錐である場合にも、このような基準体57を用いることで、第1実施形態と同様の効果を奏する。
次に、本発明の第5実施形態に係る駆動プロファイルの作成方法について説明する。本実施形態に係る駆動プロファイルの作成方法の特徴は、さらに上記各実施形態の場合とは基準体の形状を代えて、円錐体形状の基準体を用いる点にある。図10は、基準体57に対する駆動プロファイルの作成方法に関し、本実施形態における基準体57の形状計測を説明するための斜視図である。ここで、制御部7は、計測ヘッド4をZ軸を中心に周回させ、回転ステージ3の第2回転部3Bの角度制限から、計測ヘッド4に基準体57の側面(円錐面)のみを計測させるものとする。この計測の際の駆動プロファイルは、回転ステージ3の第2回転部3Bの駆動指令値である角度Rot2が変わる以外は、第1実施形態における円筒計測の場合と同じとなる。このとき、回転ステージ3の角度Rot2は、基準体57の法線とXY平面との角度をβとすると、以下の式(32)で表される。
Rot2=π/2−β (32)
そして、基準体57に対する駆動プロファイルを1次変換し新たな駆動プロファイルに補正する方法についても、第1実施形態と同様である。本実施形態によれば、図1でいう被検体5の形状が円錐である場合にも、このような基準体57を用いることで、第1実施形態と同様の効果を奏する。
以上、本発明の好ましい実施形態について説明したが、本発明は、これらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
4 計測ヘッド
5 被検体
7 制御部
5 被検体
7 制御部
Claims (9)
- 被検体に対して所定の処理を行う処理ヘッドの駆動プロファイルを作成する方法であって、
基準体の形状に合わせた位置および姿勢の情報を含む該基準体に対する駆動プロファイルを取得する第1工程と、
前記基準体の位置および姿勢を変更しながら、該基準体を前記被検体の一部分に適用する第2工程と、
前記第2工程で適用された前記基準体の位置および姿勢に基づいて、前記基準体に対する駆動プロファイルを補正して、前記被検体の一部分に対する前記処理ヘッドの駆動プロファイルを作成する第3工程と、
前記被検体の複数の部分に対して前記第2工程および前記第3工程を行うことにより、前記被検体の複数の部分に対する前記処理ヘッドの複数の駆動プロファイルを作成する第4工程と、
を含むことを特徴とする駆動プロファイルの作成方法。 - 前記基準体に対する前記駆動プロファイルは、前記基準体の大きさの情報を含むことを特徴とする請求項1に記載の駆動プロファイルの作成方法。
- 前記処理ヘッドが光の投受光を行うものであって、
前記第2工程では、前記処理ヘッドの許容深度を超えない範囲で、前記基準体が適用される、
ことを特徴とする請求項1または2に記載の駆動プロファイルの作成方法。 - 前記処理ヘッドが光の投受光を行うものであって、
前記第2工程では、前記処理ヘッドの光束走査長を超えない範囲で、前記基準体が適用される、
ことを特徴とする請求項1または2に記載の駆動プロファイルの作成方法。 - 前記第4工程では、前記複数の駆動プロファイルを組み合わせて前記被検体に対する駆動プロファイルを作成し、組み合わされる隣り合う前記基準体の一方の終了点と、他方の開始点との前記処理ヘッドの回転に係る角度の差がπ以上のときに、一方の前記基準体に対する駆動プロファイルの角度に、2πまたは−2πのオフセットを加えることを特徴とする請求項1ないし4のいずれか1項に記載の駆動プロファイルの作成方法。
- 前記基準体に対する駆動プロファイルは、前記処理ヘッドの回転方向が正の場合と負の場合とがあることを特徴とする請求項1ないし5のいずれか1項に記載の駆動プロファイルの作成方法。
- 前記第4工程では、前記処理ヘッドの回転に係る角度が、駆動可能な最大角度を超えないことを特徴とする請求項6に記載の駆動プロファイルの作成方法。
- 前記基準体の形状は、円筒、平面、直方体、球、円錐のいずれかであることを特徴とする請求項1ないし7のいずれか1項に記載の駆動プロファイルの作成方法。
- 被検体に対して所定の処理を行う処理ヘッドを有する処理装置であって、
前記処理ヘッドを移動させる駆動部と、
請求項1ないし8のいずれか1項に記載の作成方法で作成された前記被検体に対する駆動プロファイルに基づいて、前記駆動部の駆動を制御する制御部と、
を有することを特徴とする処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255560A JP2015114177A (ja) | 2013-12-11 | 2013-12-11 | 駆動プロファイルの作成方法、および処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255560A JP2015114177A (ja) | 2013-12-11 | 2013-12-11 | 駆動プロファイルの作成方法、および処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015114177A true JP2015114177A (ja) | 2015-06-22 |
Family
ID=53528103
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013255560A Pending JP2015114177A (ja) | 2013-12-11 | 2013-12-11 | 駆動プロファイルの作成方法、および処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015114177A (ja) |
-
2013
- 2013-12-11 JP JP2013255560A patent/JP2015114177A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8118438B2 (en) | Method and apparatus for real-time projection onto an object of data obtained from 3-D measurement | |
| US9383198B2 (en) | Method and device for reducing errors in a turning device during the determination of coordinates of a workpiece or during the machining of a workpiece | |
| JP2020128000A (ja) | 非破壊検査装置及び方法 | |
| CN103453849B (zh) | 多光学传感器协同的复杂曲面零件三维测量方法与系统 | |
| JP7164130B2 (ja) | 三次元形状測定用x線ct装置の長さ測定誤差評価用器物 | |
| JP2014509730A (ja) | 形状測定装置、形状測定方法、及び構造物の製造方法 | |
| TWI623724B (zh) | Shape measuring device, structure manufacturing system, stage system, shape measuring method, structure manufacturing method, shape measuring program, and computer readable recording medium | |
| JP2016513257A (ja) | 投影システム | |
| CN108827187B (zh) | 一种三维轮廓测量系统 | |
| JP2004257927A (ja) | 3次元形状測定システムおよび3次元形状測定方法 | |
| JP2008275624A (ja) | 座標測定方法および座標測定装置 | |
| JP2006006896A (ja) | 三次元スキャニングシステム用駆動装置及び、これを用いた歯牙コンピュータモデリング用三次元スキャニングシステム | |
| JP2014126381A (ja) | 形状測定装置、構造物製造システム、形状測定方法、構造物製造方法、及び形状測定プログラム | |
| JP2014153149A (ja) | 形状測定装置、構造物製造システム、形状測定方法、及びプログラム | |
| Olarra et al. | Experimental evaluation of a special purpose miniature machine tool with parallel kinematics architecture: Free leg hexapod | |
| TW202303089A (zh) | 從藉由視覺感測器取得之三維的位置資訊來生成剖面圖像的處理裝置及處理方法 | |
| US8085296B2 (en) | Method and apparatus for measuring an operating position in a remote inspection | |
| ES2877098T3 (es) | Vinculación de microscopios para el análisis de objetos que comprenden marcas de herramientas | |
| Landstorfer et al. | Investigation of positioning accuracy of industrial robots for robotic-based X-ray computed tomography | |
| JP2009222568A (ja) | 3次元形状データの生成方法および装置ならびにコンピュータプログラム | |
| CN101916457B (zh) | 三维点云数据获取用的基准体及点云合成方法 | |
| JP2015114177A (ja) | 駆動プロファイルの作成方法、および処理装置 | |
| JP2014238687A (ja) | 画像処理装置、ロボット制御システム、ロボット、画像処理方法及び画像処理プログラム | |
| JP6786255B2 (ja) | 形状測定方法、形状測定装置、およびデータ処理方法 | |
| JP4863006B2 (ja) | 3次元形状測定方法 |