JP2014527630A - 測定補助器具の空間的な姿勢を決定するための測定装置 - Google Patents
測定補助器具の空間的な姿勢を決定するための測定装置 Download PDFInfo
- Publication number
- JP2014527630A JP2014527630A JP2014525388A JP2014525388A JP2014527630A JP 2014527630 A JP2014527630 A JP 2014527630A JP 2014525388 A JP2014525388 A JP 2014525388A JP 2014525388 A JP2014525388 A JP 2014525388A JP 2014527630 A JP2014527630 A JP 2014527630A
- Authority
- JP
- Japan
- Prior art keywords
- latest
- image
- auxiliary point
- pixels
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
- G01C1/02—Theodolites
- G01C1/04—Theodolites combined with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/16—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/16—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves
- G01S5/163—Determination of attitude
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
Abstract
Description
−読み出しの際に得られた露光値が閾値判定基準を満たしているピクセル、特に閾値を上回っているピクセルをフィルタリングするステップ、
−フィルタリングされた、エリアセンサの一つの行における密着した行領域を形成する各ピクセルをピクセルスライスへと統合するステップ、
−各ピクセルスライスに関して各重心配分(部分重心)を求めるステップ、
−結像された少なくとも一つの補助点マーキングに属する各ピクセルスライスが相互に対応付けられるようにピクセルスライスをグループ分けするステップ、
−少なくとも一つの補助点マーキングの少なくとも一つの画像ポジションを、相互に対応付けられている各ピクセルスライスの対応する各重心配分に基づき導出するステップ。
−ピクセルをフィルタリングするステップ、
−フィルタリングされた、エリアセンサの一つの行における密着した行領域を形成する各ピクセルをピクセルスライスへと統合するステップ、
−各重心配分を求めるステップ、
−グループ分けを行うステップ、
−少なくとも一つの補助点マーキングの少なくとも一つの画像ポジションを、相互に対応付けられている各ピクセルスライスの対応する各重心配分に基づき導出するステップ。
Claims (15)
- 少なくとも一つの補助点マーキング(22,32,32a,32b)を有している測定補助器具(20)の空間的な姿勢を継続的に決定するための、特にレーザトラッカ(11)を用いる姿勢決定方法であって、
特に、前記測定補助器具(20)は複数の補助点マーキング(22,32,32a,32b)を相互に相対的な固定の既知の空間的な分布で有しており、
前記姿勢決定方法は、
・複数のピクセル(38a−d,42)を有しているエリアセンサ(30,50)を備えているカメラ(12,61)を用いて、前記少なくとも一つの補助点マーキング(22,32,32a、32b)のカメラ画像(50a)を継続的に検出するステップと、
・その都度の最新の露光値に関して前記ピクセル(38a−d,42)の内の少なくとも幾つかのピクセルが読み出される読み出しプロセスを継続的に実行するステップと、
・その都度の最新の読み出しプロセスの枠内で得られた露光値に依存して、その都度の最新のカメラ画像(50a)において結像された前記少なくとも一つの補助点マーキング(22,32,32a、32b)に関する少なくとも一つの画像ポジションを継続的に決定するステップと、
・少なくとも一つの最新の画像ポジションに基づき、また特に複数の補助点マーキング(22,32,32a、32b)の相互に相対的な固定の既知の空間的な分布に基づき、前記測定補助器具(20)のその都度の最新の空間的な姿勢を継続的に導出するステップとを備えている、姿勢決定方法において、
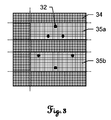
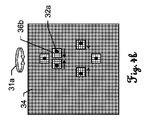
・先行して検出された少なくとも一つのカメラ画像(50a)において決定された少なくとも一つの画像ポジションの集合に依存して、前記エリアセンサ(30,50)における少なくとも一つのその都度の最新の関心領域(35a,35b,36a,36b,36c)を継続的に設定するステップであって、前記少なくとも一つの関心領域(35a,35b,36a,36b,36c)はそれぞれ、前記エリアセンサ(30,50)の全てのピクセル(38a−d,42)の中から関連する隣接ピクセル(38a−d,42)の限定的なサブセットを規定するステップと、
・前記エリアセンサ(30,50)に設定された前記少なくとも一つの最新の関心領域(35a,35b,36a,36b,36c)内に位置するピクセル(38a−d,42)に含まれている最新の露光値のみを最大限に考慮して、前記少なくとも一つの最新の画像ポジションを決定するステップと、
を備えていることを特徴とする、姿勢決定方法。 - 前記少なくとも一つの最新の関心領域(35a,35b,36a,36b,36c)内に位置するピクセル(38a−d,42)のみがその都度読み出されるように、前記その都度の最新の読み出しプロセスを実行する、請求項1に記載の姿勢決定方法。
- 前記少なくとも一つの関心領域(35a,35b,36a,36b,36c)を設定するために、先行して連続的に検出された複数のカメラ画像(50a)において決定された前記少なくとも一つの画像ポジションの集合から、特にカルマンフィルタに基づき、前記少なくとも一つの最新の画像ポジションに対してそれぞれ一つの期待値を求める、請求項1又は2に記載の姿勢決定方法。
- 前記少なくとも一つの画像ポジションの決定を以下のステップによって行い、即ち、
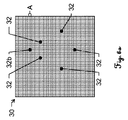
・読み出しの際に得られた露光値が閾値判定基準を満たしているピクセル(38a−d,42)、特に閾値を上回っているピクセル(38a−d,42)をフィルタリングするステップ、
・フィルタリングされた、前記エリアセンサ(30,50)の一つの行(37a−d,41)における密着した行領域を形成する各ピクセル(38a−d,42)をピクセルスライス(39a−d,51a)へと統合するステップ、
・各ピクセルスライス(39a−d,51a)に関して各重心配分を求めるステップ、
・結像された前記少なくとも一つの補助点マーキング(22,32,32a、32b)に属する各ピクセルスライス(39a−d,51a)が相互に対応付けられるようにピクセルスライス(39a−d,51a)をグループ分けするステップ、
・相互に対応付けられている各ピクセルスライス(39a−d,51a)の対応する各重心配分に基づき、前記少なくとも一つの補助点マーキング(22,32,32a、32b)の前記少なくとも一つの画像ポジションを導出するステップ、
によって行い、
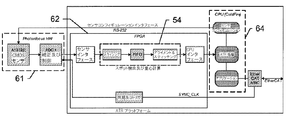
特に、前記のフィルタリングするステップ、ピクセルスライス(39a−d,51a)へと統合するステップ(53)及び重心配分を求めるステップを、特にピクセル読み出しクロックレートに相当する比較的高い第1のレートでクロックレートで行い、且つ、前記のグループ分けするステップ及び少なくとも一つの画像ポジションを決定するステップを比較的低い第2のレートで行う、請求項1乃至3のいずれか一項に記載の姿勢決定方法。 - 少なくとも一つの補助点マーキング(22,32,32a、32b)を有している測定補助器具(20)の空間的な姿勢を継続的に決定するための測定装置、特にレーザトラッカ(11)であって、
特に、前記測定補助器具(20)は複数の補助点マーキング(22,32,32a,32b)を相互に相対的な固定の既知の空間的な分布で有しており、
前記測定装置は、
・複数のピクセル(38a−d,42)を有しているエリアセンサ(30,50)を備え、且つ、前記少なくとも一つの補助点マーキング(22,32,32a、32b)のカメラ画像(50a)を継続的に検出するカメラ(12,61)と、
・評価及び制御ユニットとを有しており、
前記評価及び制御ユニットは、
○その都度の最新の露光値に関して前記複数のピクセル(38a−d,42)の内の少なくとも幾つかのピクセルが読み出される、継続的に実行可能な読み出しプロセスを制御するために、且つ、
○その都度の最新の読み出しプロセスの枠内で得られた露光値に依存して、その都度の最新のカメラ画像(50a)において結像された少なくとも一つの補助点マーキング(22,32,32a、32b)に関する少なくとも一つの画像ポジションを継続的に決定するために、且つ、
○少なくとも一つの最新の画像ポジションに基づき、特に複数の補助点マーキング(22,32,32a、32b)の相互に相対的な固定の既知の空間的な分布に基づき、前記測定補助器具(20)のその都度の最新の空間的な姿勢を継続的に導出するために、
構成されている、測定装置において、
前記評価及び制御ユニットは、更に、
・先行して検出された少なくとも一つのカメラ画像(50a)において決定された前記少なくとも一つの画像ポジションの集合に依存して、前記エリアセンサ(30,50)において少なくとも一つのその都度の最新の関心領域(35a,35b,36a,36b,36c)を継続的に設定するために構成されており、但し、前記少なくとも一つの関心領域(35a,35b,36a,36b,36c)はそれぞれ、前記エリアセンサ(30,50)の全てのピクセル(38a−d,42)の中から関連する隣接ピクセル(38a−d,42)の限定的なサブセットを規定し、
前記評価及び制御ユニットは、更に、
・少なくとも一つのその都度の最新の画像ポジションの決定に関して、設定された前記少なくとも一つの最新の関心領域(35a,35b,36a,36b,36c)内に位置する、前記エリアセンサのピクセル(38a−d,42)に含まれている最新の露光値のみを最大限に考慮するために構成されている、
ことを特徴とする、測定装置。 - 前記評価及び制御ユニットは、前記少なくとも一つの最新の関心領域(35a,35b,36a,36b,36c)内に位置するピクセル(38a−d,42)のみがその都度読み出されるように前記読み出しプロセスを制御するために構成されている、請求項5に記載の測定装置。
- 前記少なくとも一つの関心領域(35a,35b,36a,36b,36c)を設定するために、前記評価及び制御ユニットによって、先行して連続的に検出された複数のカメラ画像(50a)において決定された前記少なくとも一つの画像ポジションの集合から、特にカルマンフィルタに基づき、前記少なくとも一つの最新の画像ポジションに対してそれぞれ一つの期待値を求める、請求項5又は6に記載の測定装置。
- 少なくとも一つの補助点マーキング(22,32,32a,32b)を有している測定補助器具(20)の空間的な姿勢を継続的に決定するための、特にレーザトラッカ(11)を用いる姿勢決定方法であって、
特に、前記測定補助器具(20)は複数の補助点マーキング(22,32,32a,32b)を相互に相対的な固定の既知の空間的な分布で有しており、
前記姿勢決定方法は、
・複数のピクセル(38a−d,42)を有しているエリアセンサ(30,50)を備えているカメラ(12,61)を用いて、前記少なくとも一つの補助点マーキング(22,32,32a、32b)のカメラ画像(50a)を継続的に検出するステップと、
・その都度の最新の露光値に関して前記ピクセル(38a−d,42)の内の少なくとも幾つかのピクセルが読み出される読み出しプロセスを継続的に実行するステップと、
・その都度の最新の読み出しプロセスの枠内で得られた露光値に依存して、その都度の最新のカメラ画像(50a)において結像された前記少なくとも一つの補助点マーキング(22,32,32a、32b)に関する少なくとも一つの画像ポジションを継続的に決定するステップと、
・少なくとも一つの最新の画像ポジションに基づき、また特に複数の補助点マーキング(22,32,32a、32b)の相互に相対的な固定の既知の空間的な分布に基づき、前記測定補助器具(20)のその都度の最新の空間的な姿勢を継続的に導出するステップとを備えている、姿勢決定方法において、
前記少なくとも一つの画像ポジションの決定を以下のステップによって行い、即ち、
・読み出しの際に得られた露光値が閾値判定基準を満たしているピクセル(38a−d,42)、特に閾値を上回っているピクセル(38a−d,42)をフィルタリングするステップ、
・フィルタリングされた、前記エリアセンサ(30,50)の一つの行(37a−d,41)における密着した行領域を形成する各ピクセル(38a−d,42)をピクセルスライス(39a−d,51a)へと統合するステップ(53)、
・各ピクセルスライス(39a−d,51a)に関して各重心配分を求めるステップ、
・結像された少なくとも一つの補助点マーキング(22,32,32a、32b)に属する各ピクセルスライス(39a−d,51a)が相互に対応付けられるようにピクセルスライス(39a−d,51a)をグループ分けするステップ、
・相互に対応付けられている各ピクセルスライス(39a−d,51a)の対応する各重心配分に基づき、前記少なくとも一つの補助点マーキング(22,32,32a、32b)の前記少なくとも一つの画像ポジションを導出するステップ、
によって行うことを特徴とする、姿勢決定方法。 - ・前記読み出しプロセスの枠内で、前記エリアセンサ(30,50)をピクセル(38a−d,42)毎且つ行(37a−d,41)毎に所定のピクセル読み出しレートで読み出し、
・遅くとも各行(37a−d,41)の読み出しが完了した直後に、既に当該各行(37a−d,41)に関して、前記少なくとも一つの画像ポジションの決定の枠内で行われる、前記のフィルタリングするステップ、統合するステップ(53)、及び、各重心配分を求めるステップを開始及び実行し、
特に、前記のフィルタリングするステップ、ピクセルスライス(39a−d,51a)へと統合するステップ(53)及び重心配分を求めるステップを、特にピクセル読み出しレートに相当する比較的高い第1のレートでクロック制御し、且つ、前記のグループ分けするステップ及び画像ポジションを決定するステップを比較的低い第2のレートでクロック制御する、請求項8に記載の姿勢決定方法。 - 少なくとも一つの補助点マーキング(22,32,32a、32b)を有している測定補助器具(20)の空間的な姿勢を継続的に決定するための測定装置、特にレーザトラッカ(11)であって、
特に、前記測定補助器具(20)は複数の補助点マーキング(22,32,32a,32b)を相互に相対的な固定の既知の空間的な分布で有しており、
前記測定装置は、
・複数のピクセル(38a−d,42)を有しているエリアセンサ(30,50)において、前記少なくとも一つの補助点マーキング(22,32,32a、32b)のカメラ画像(50a)を継続的に形成するカメラ(12,61)と、
・評価及び制御ユニットとを有しており、
前記評価及び制御ユニットは、
○その都度の最新の露光値に関して、前記エリアセンサ(30,50)の前記複数のピクセル(38a−d,42)の内の少なくとも幾つかのピクセルが読み出される、継続的に実行可能な読み出しプロセスを制御するために、且つ、
○その都度の最新の読み出しプロセスの枠内で得られた露光値に依存して、その都度の最新のカメラ画像(50a)において結像された少なくとも一つの補助点マーキング(22,32,32a、32b)の少なくとも一つの画像ポジションを継続的に決定するために、且つ、
○少なくとも一つの最新の画像ポジションに基づき、特に複数の補助点マーキング(22,32,32a、32b)の相互に相対的な固定の既知の空間的な分布に基づき、前記測定補助器具(20)のその都度の最新の空間的な姿勢を継続的に導出するために、
構成されている、測定装置において、
前記評価及び制御ユニットは以下のステップ、即ち、
・読み出しの際に得られた露光値が閾値判定基準を満たしているピクセル(38a−d,42)、特に閾値を上回っているピクセル(38a−d,42)をフィルタリングするステップ、
・フィルタリングされた、前記エリアセンサ(30,50)の一つの行(37a−d,41)における密着した行領域を形成する各ピクセル(38a−d,42)をピクセルスライス(39a−d,51a)へと統合するステップ(53)、
・各ピクセルスライス(39a−d,51a)に関して各重心配分を求めるステップ、
・結像された少なくとも一つの補助点マーキング(22,32,32a、32b)に属する各ピクセルスライス(39a−d,51a)が相互に対応付けられるようにピクセルスライス(39a−d,51a)をグループ分けするステップ、
・前記少なくとも一つの補助点マーキング(22,32,32a、32b)の前記少なくとも一つの画像ポジションを、相互に対応付けられている各ピクセルスライス(39a−d,51a)の対応する各重心配分に基づき導出するステップ、
を前記少なくとも一つの画像ポジションの決定の枠内で自動的に実行するために構成されており、
特に、前記の複数のステップは相応に事前にプログラミングされたFPGA又はASICによって自動的に実行されることを特徴とする測定装置。 - 前記カメラ(12,61)は可変の焦点距離を備えた光学系を有しており、前記焦点距離(従って前記カメラ(12,61)の結像比率)は、前記測定補助器具(20)が距離に依存せずに実質的に一定の範囲で前記エリアセンサ(30,50)に結像されるように、前記評価及び制御ユニットによって自動的に制御されて継続的に変更され、特に、前記カメラ(12,61)は、可変の焦点幅及び焦点調節部を有しているズームレンズ又は単焦点レンズを有している、請求項5乃至7のいずれか一項又は請求項10に記載の測定装置。
- 前記測定装置は更に、
・柱脚と、
・前記柱脚に対する前記カメラ(12,61)の配向を機械的に変化させるための調整手段と、
・前記カメラ(12,61)のその都度の最新の配向を継続的に検出するための角度測定手段と、
を有しており、
前記評価及び制御ユニットは、前記カメラ(12,61)の配向の変化を継続的に制御するために、前記カメラ(12,61)が継続的に前記測定補助器具(20)へと配向されるように構成されている、請求項5乃至7のいずれか一項、若しくは請求項10又は11に記載の測定装置。 - 前記測定装置はレーザトラッカ(11)として構成されており、更に、
・前記測定補助器具(20)に設けられているレトロリフレクタ(21)までの距離を測定するための、照準線の方向において測定される、少なくとも一つの光学的な距離測定装置と、
・前記柱脚に対する前記照準線の配向を機械的に変化させるための調整手段と、
・前記照準線のその都度の最新の配向を継続的に検出するための角度測定手段と、
・前記測定補助器具(20)の前記レトロリフレクタ(21)を前記照準線を用いて追跡し、該照準線を継続的に前記レトロリフレクタ(21)へと配向させる測定及び制御回路と、
を有している、請求項12に記載の測定装置。 - 測定システムにおいて、
該測定システムは、
・請求項5乃至7又は請求項10乃至13のいずれか一項に記載の測定装置と、
・少なくとも一つの補助点マーキング(22,32,32a,32b)、特に光点を有している測定補助器具(20)と、
から構成されており、
特に、前記測定補助器具(20)は複数の補助点マーキング(22,32,32a,32b)を相互に相対的な固定の既知の空間的な分布で有しており、
特に、前記測定補助器具(20)は前記少なくとも一つの補助点マーキング(22,32,32a,32b)の他にレトロリフレクタ(21)を有している、
ことを特徴とする、測定システム。 - 機械読み出し可能な担体に記憶されているプログラムコードを備えているコンピュータプログラム製品において、
前記プログラムコードは、
・請求項1乃至4のいずれか一項に記載の姿勢決定方法を制御又は実行するためのプログラムコードであるか、
又は、
・特にプログラムがFPGA又はASICにおいて実行される場合には、請求項8又は9に記載の姿勢決定方法の、少なくとも一つの画像ポジションの決定の枠内で行われる、
○ピクセル(38a−d,42)をフィルタリングするステップ、
○フィルタリングされた、前記エリアセンサ(30,50)の一つの行(37a−d,41)における密着した行領域を形成する各ピクセル(38a−d,42)をピクセルスライス(39a−d,51a)へと統合するステップ(53)、
○各重心配分を求めるステップ、
○グループ分けするステップ、
○少なくとも一つの補助点マーキング(22,32,32a、32b)の少なくとも一つの画像ポジションを、相互に対応付けられている各ピクセルスライス(39a−d,51a)の対応する各重心配分に基づき導出するステップ、
を実行するためのプログラムコードである、
ことを特徴とする、コンピュータプログラム製品。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11177500A EP2557391A1 (de) | 2011-08-12 | 2011-08-12 | Messgerät zur Bestimmung der räumlichen Lage eines Messhilfsinstruments |
| EP11177500.3 | 2011-08-12 | ||
| PCT/EP2012/064962 WO2013023904A1 (de) | 2011-08-12 | 2012-07-31 | Messgerät zur bestimmung der räumlichen lage eines messhilfsinstruments |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014527630A true JP2014527630A (ja) | 2014-10-16 |
Family
ID=46584051
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014525388A Pending JP2014527630A (ja) | 2011-08-12 | 2012-07-31 | 測定補助器具の空間的な姿勢を決定するための測定装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9401024B2 (ja) |
| EP (3) | EP2557391A1 (ja) |
| JP (1) | JP2014527630A (ja) |
| KR (2) | KR101632245B1 (ja) |
| CN (1) | CN107084663B (ja) |
| WO (1) | WO2013023904A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105823471A (zh) * | 2015-01-28 | 2016-08-03 | 株式会社拓普康 | 三维位置计测系统 |
| JP2016145791A (ja) * | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| JP2016145790A (ja) * | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| JP2016206129A (ja) * | 2015-04-28 | 2016-12-08 | 株式会社トプコン | 三次元位置計測システム |
| JP2016206130A (ja) * | 2015-04-28 | 2016-12-08 | 株式会社トプコン | 三次元位置計測システム |
| CN111896972A (zh) * | 2020-06-16 | 2020-11-06 | 中国工程物理研究院应用电子学研究所 | 一种机载激光雷达同步控制及数码影像外方位元素列表自动创建方法 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6181925B2 (ja) * | 2012-12-12 | 2017-08-16 | キヤノン株式会社 | 画像処理装置、画像処理装置の制御方法およびプログラム |
| KR102233319B1 (ko) * | 2014-01-20 | 2021-03-29 | 삼성전자주식회사 | 관심 영역 추적 방법, 방사선 촬영 장치, 방사선 촬영 장치의 제어 방법 및 방사선 촬영 방법 |
| EP2980526B1 (de) | 2014-07-30 | 2019-01-16 | Leica Geosystems AG | Koordinatenmessgerät und Verfahren zum Messen von Koordinaten |
| EP3032277B1 (de) | 2014-12-12 | 2021-04-07 | Leica Geosystems AG | Lasertracker |
| EP3220163B1 (de) | 2016-03-15 | 2021-07-07 | Leica Geosystems AG | Lasertracker mit zwei messfunktionalitäten |
| WO2018150336A1 (en) * | 2017-02-14 | 2018-08-23 | Atracsys Sàrl | High-speed optical tracking with compression and/or cmos windowing |
| WO2018151760A1 (en) | 2017-02-20 | 2018-08-23 | 3M Innovative Properties Company | Optical articles and systems interacting with the same |
| WO2019064108A1 (en) | 2017-09-27 | 2019-04-04 | 3M Innovative Properties Company | PERSONAL PROTECTIVE EQUIPMENT MANAGEMENT SYSTEM USING OPTICAL PATTERNS FOR EQUIPMENT AND SECURITY MONITORING |
| CN108109176A (zh) * | 2017-12-29 | 2018-06-01 | 北京进化者机器人科技有限公司 | 物品检测定位方法、装置及机器人 |
| CN108398728A (zh) * | 2018-05-07 | 2018-08-14 | 广东工业大学 | 一种设备之间配合误差的辅助标记装置 |
| DE102018111638A1 (de) * | 2018-05-15 | 2019-11-21 | Krones Ag | Verfahren zum Inspizieren von Behältnissen mit Petitionsbestimmung |
| EP3627100B1 (de) * | 2018-09-20 | 2021-12-01 | Hexagon Technology Center GmbH | Retroreflektor mit fischaugenobjektiv |
| CN109969492A (zh) * | 2019-03-20 | 2019-07-05 | 合肥神马电气有限公司 | 一种用于高压电缆线盘包装的参照定位方法 |
| CN110455183A (zh) * | 2019-07-26 | 2019-11-15 | 国营芜湖机械厂 | 一种战场抢修用航空导管测绘系统及方法 |
| CN112866552B (zh) * | 2019-11-12 | 2023-06-13 | Oppo广东移动通信有限公司 | 对焦方法和装置、电子设备、计算机可读存储介质 |
| DE102020113183B4 (de) * | 2020-05-15 | 2021-12-16 | Sick Ag | Kamera und Verfahren zur Erfassung von bewegten Objekten |
| CN111738180B (zh) * | 2020-06-28 | 2023-03-24 | 浙江大华技术股份有限公司 | 关键点的标注方法、装置、存储介质及电子装置 |
| CN112686175A (zh) * | 2020-12-31 | 2021-04-20 | 北京澎思科技有限公司 | 人脸抓拍方法、系统及计算机可读存储介质 |
| EP4027103A1 (en) * | 2021-01-12 | 2022-07-13 | Metronor AS | Method for determining a current position and/or orientation of a laser radar relative to an object to be measured |
| DE202021003875U1 (de) | 2021-12-27 | 2023-03-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Vorrichtung zur Bestimmung von Relativlagen zweier gleichsinnig um eine Rotationsachse rotierender Objekte |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0394386A (ja) * | 1989-09-07 | 1991-04-19 | Nec Corp | 円図形中心位置計測回路 |
| JPH03138504A (ja) * | 1989-10-24 | 1991-06-12 | Kobe Steel Ltd | スポット位置及びスリット位置の検出方法 |
| JPH08230798A (ja) * | 1994-06-17 | 1996-09-10 | Trw Inc | 自律的ランデブー及びドッキングシステム並びにその方法 |
| JPH10197230A (ja) * | 1997-01-09 | 1998-07-31 | Saginomiya Seisakusho Inc | ホイールアラインメント測定装置及びホイールアラインメント測定方法 |
| JP2003141545A (ja) * | 2001-08-07 | 2003-05-16 | Samsung Electronics Co Ltd | 移動物体自動追跡装置及び方法 |
| JP2007504459A (ja) * | 2003-09-05 | 2007-03-01 | ファロ テクノロジーズ インコーポレーテッド | 自己補償レーザトラッカ |
| JP2007524158A (ja) * | 2004-01-16 | 2007-08-23 | アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド | 位置判定及びモーショントラッキング |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4809066A (en) * | 1987-08-03 | 1989-02-28 | Vexcel Corporation | Method of image mensuration with selectively visible and invisible reseau grid marks |
| US5198877A (en) | 1990-10-15 | 1993-03-30 | Pixsys, Inc. | Method and apparatus for three-dimensional non-contact shape sensing |
| US5227985A (en) * | 1991-08-19 | 1993-07-13 | University Of Maryland | Computer vision system for position monitoring in three dimensions using non-coplanar light sources attached to a monitored object |
| NO174025C (no) * | 1991-10-11 | 1994-03-02 | Metronor Sa | System for punktvis maaling av romlige koordinater |
| JPH0829120A (ja) * | 1994-07-12 | 1996-02-02 | Sumitomo Heavy Ind Ltd | 曲面を有する物体の位置計測方法及び曲面を有する2つの物体の位置合わせ制御装置 |
| NO301999B1 (no) * | 1995-10-12 | 1998-01-05 | Metronor As | Kombinasjon av laser tracker og kamerabasert koordinatmåling |
| US5828770A (en) * | 1996-02-20 | 1998-10-27 | Northern Digital Inc. | System for determining the spatial position and angular orientation of an object |
| US6310644B1 (en) * | 1997-03-26 | 2001-10-30 | 3Dm Devices Inc. | Camera theodolite system |
| DE19859947C2 (de) | 1998-12-28 | 2001-02-01 | Anatoli Stobbe | System zur räumlichen Zuordnung wenigstens eines Transponders zu Zellen eines Detektionsgebietes, Basisstation sowie Transponder |
| US20020131643A1 (en) * | 2001-03-13 | 2002-09-19 | Fels Sol Sidney | Local positioning system |
| EP1420264B1 (de) * | 2002-11-15 | 2011-01-05 | Leica Geosystems AG | Verfahren und Vorrichtung zur Kalibrierung eines Messsystems |
| US7223954B2 (en) * | 2003-02-03 | 2007-05-29 | Goodrich Corporation | Apparatus for accessing an active pixel sensor array |
| CA2429880C (en) * | 2003-05-27 | 2009-07-07 | York University | Collaborative pointing devices |
| EP1515152A1 (de) * | 2003-09-12 | 2005-03-16 | Leica Geosystems AG | Verfahren zur Richtungsbestimmung zu einem zu vermessenden Objekt |
| CN101427153B (zh) | 2006-04-20 | 2013-02-27 | 法罗技术股份有限公司 | 坐标测量方法和坐标测量系统 |
| US7576847B2 (en) | 2006-04-21 | 2009-08-18 | Faro Technologies, Inc. | Camera based six degree-of-freedom target measuring and target tracking device with rotatable mirror |
| CN101583841B (zh) * | 2007-01-25 | 2011-02-16 | 特林布尔公司 | 测地仪的对准 |
| DE102008027976A1 (de) * | 2008-06-12 | 2009-12-31 | Steinbichler Optotechnik Gmbh | Verfahren und Vorrichtung zur Ermittlung der Lage eines Sensors |
| US8199194B2 (en) * | 2008-10-07 | 2012-06-12 | The Boeing Company | Method and system involving controlling a video camera to track a movable target object |
| CN102216803A (zh) * | 2008-11-17 | 2011-10-12 | 法罗技术股份有限公司 | 测量六个自由度的装置和方法 |
| EP2405236B1 (de) | 2010-07-07 | 2012-10-31 | Leica Geosystems AG | Geodätisches Vermessungsgerät mit automatischer hochpräziser Zielpunkt-Anzielfunktionalität |
-
2011
- 2011-08-12 EP EP11177500A patent/EP2557391A1/de not_active Withdrawn
-
2012
- 2012-07-31 JP JP2014525388A patent/JP2014527630A/ja active Pending
- 2012-07-31 KR KR1020147004836A patent/KR101632245B1/ko active IP Right Grant
- 2012-07-31 EP EP15161383.3A patent/EP3001138B1/de active Active
- 2012-07-31 KR KR1020157017577A patent/KR101686054B1/ko active IP Right Grant
- 2012-07-31 US US14/238,700 patent/US9401024B2/en active Active
- 2012-07-31 EP EP12740617.1A patent/EP2742319B1/de active Active
- 2012-07-31 CN CN201611025024.8A patent/CN107084663B/zh active Active
- 2012-07-31 WO PCT/EP2012/064962 patent/WO2013023904A1/de active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0394386A (ja) * | 1989-09-07 | 1991-04-19 | Nec Corp | 円図形中心位置計測回路 |
| JPH03138504A (ja) * | 1989-10-24 | 1991-06-12 | Kobe Steel Ltd | スポット位置及びスリット位置の検出方法 |
| JPH08230798A (ja) * | 1994-06-17 | 1996-09-10 | Trw Inc | 自律的ランデブー及びドッキングシステム並びにその方法 |
| JPH10197230A (ja) * | 1997-01-09 | 1998-07-31 | Saginomiya Seisakusho Inc | ホイールアラインメント測定装置及びホイールアラインメント測定方法 |
| JP2003141545A (ja) * | 2001-08-07 | 2003-05-16 | Samsung Electronics Co Ltd | 移動物体自動追跡装置及び方法 |
| JP2007504459A (ja) * | 2003-09-05 | 2007-03-01 | ファロ テクノロジーズ インコーポレーテッド | 自己補償レーザトラッカ |
| JP2007524158A (ja) * | 2004-01-16 | 2007-08-23 | アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド | 位置判定及びモーショントラッキング |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105823471A (zh) * | 2015-01-28 | 2016-08-03 | 株式会社拓普康 | 三维位置计测系统 |
| JP2016145791A (ja) * | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| JP2016145790A (ja) * | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| US10473462B2 (en) | 2015-01-28 | 2019-11-12 | Kabushiki Kaisha Topcon | System of measuring three-dimensional position |
| JP2016206129A (ja) * | 2015-04-28 | 2016-12-08 | 株式会社トプコン | 三次元位置計測システム |
| JP2016206130A (ja) * | 2015-04-28 | 2016-12-08 | 株式会社トプコン | 三次元位置計測システム |
| CN111896972A (zh) * | 2020-06-16 | 2020-11-06 | 中国工程物理研究院应用电子学研究所 | 一种机载激光雷达同步控制及数码影像外方位元素列表自动创建方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2742319A1 (de) | 2014-06-18 |
| EP3001138A1 (de) | 2016-03-30 |
| CN103797328A (zh) | 2014-05-14 |
| EP2742319B1 (de) | 2019-05-22 |
| KR101686054B1 (ko) | 2016-12-13 |
| US20140211999A1 (en) | 2014-07-31 |
| KR20140043941A (ko) | 2014-04-11 |
| WO2013023904A1 (de) | 2013-02-21 |
| EP3001138B1 (de) | 2020-10-14 |
| EP2557391A1 (de) | 2013-02-13 |
| CN107084663B (zh) | 2019-12-24 |
| CN107084663A (zh) | 2017-08-22 |
| US9401024B2 (en) | 2016-07-26 |
| KR101632245B1 (ko) | 2016-07-01 |
| KR20150082695A (ko) | 2015-07-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014527630A (ja) | 測定補助器具の空間的な姿勢を決定するための測定装置 | |
| US9967545B2 (en) | System and method of acquiring three-dimensional coordinates using multiple coordinate measurment devices | |
| CN111521161B (zh) | 确定到目标的方向的方法、勘测装置和机器可读载体 | |
| JP6080969B2 (ja) | 対象物の姿勢を決定するための方法と装置 | |
| JP4290733B2 (ja) | 3次元形状計測方法及びその装置 | |
| JP5469894B2 (ja) | 測量装置及び自動追尾方法 | |
| US20150015895A1 (en) | Three-dimensional measurement device having three-dimensional overview camera | |
| CN110178156A (zh) | 包括可调节焦距成像传感器的距离传感器 | |
| JP2002090113A (ja) | 位置姿勢認識装置 | |
| JPH11510600A (ja) | 標的マークの位置を敏速に検出するための方法及び装置 | |
| CN108700408A (zh) | 三维形状数据及纹理信息生成系统、拍摄控制程序、以及三维形状数据及纹理信息生成方法 | |
| JP2022171677A (ja) | 画像取込デバイスを用いて測定ポイントを探し出すデバイス及び方法 | |
| JP6773573B2 (ja) | 位置特定装置、位置特定方法、位置特定システム、位置特定用プログラム、無人航空機および無人航空機識別用ターゲット | |
| JP2018527575A5 (ja) | ||
| JP2007093412A (ja) | 3次元形状測定装置 | |
| US20200286258A1 (en) | Apparatus for Determining Dimensional and Geometric Properties of a Measurement Object | |
| JP5874252B2 (ja) | 対象物との相対位置計測方法と装置 | |
| CN112415010A (zh) | 一种成像检测方法及系统 | |
| EP3486683A1 (en) | Retroreflector acquisition in a coordinate measuring device | |
| JP4918830B2 (ja) | 位置計測システム | |
| JP2001183120A (ja) | 3次元入力方法及び3次元入力装置 | |
| JP2003065738A (ja) | 3次元計測装置のキャリブレーション方法および3次元計測装置 | |
| JP7169757B2 (ja) | 測量装置、測量方法 | |
| US20200217661A1 (en) | Queue of data collection tasks for surveying instrument | |
| Tateishi et al. | A 200Hz small range image sensor using a multi-spot laser projector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150216 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150518 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150616 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151130 |