JP2014176256A - 回生制御装置 - Google Patents
回生制御装置 Download PDFInfo
- Publication number
- JP2014176256A JP2014176256A JP2013048995A JP2013048995A JP2014176256A JP 2014176256 A JP2014176256 A JP 2014176256A JP 2013048995 A JP2013048995 A JP 2013048995A JP 2013048995 A JP2013048995 A JP 2013048995A JP 2014176256 A JP2014176256 A JP 2014176256A
- Authority
- JP
- Japan
- Prior art keywords
- regenerative
- brake
- operation amount
- vehicle
- accelerator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Abstract
【課題】車両の減速時の回生を効率よく行うとともに、乗員の意に沿った車両の減速度合いを得ることができる車両の回生制御装置を提供すること。
【解決手段】 走行用車両の走行モータを発電機として機能させて回生制動を実行するコントローラ10であって、アクセル操作量を検出するアクセル操作量検出部21と、後ブレーキの操作量を後ブレーキレバーの固定ギヤの回転に連動する検出ギヤの回転量として検出する磁気センサ35と、アクセル操作されていないときのブレーキ操作量に応じて走行モータの回生駆動条件を変更する回生出力変更部15と、を備える。
【選択図】図4
【解決手段】 走行用車両の走行モータを発電機として機能させて回生制動を実行するコントローラ10であって、アクセル操作量を検出するアクセル操作量検出部21と、後ブレーキの操作量を後ブレーキレバーの固定ギヤの回転に連動する検出ギヤの回転量として検出する磁気センサ35と、アクセル操作されていないときのブレーキ操作量に応じて走行モータの回生駆動条件を変更する回生出力変更部15と、を備える。
【選択図】図4
Description
本発明は、回生制御装置に関し、詳しくは、走行時の運動エネルギを利用して回生発電を行う回生機構を備える車両に搭載されて、最適な回生動作を実現するものに関する。
バッテリ内の蓄電力を用いて駆動する走行モータを備える電動車両やハイブリッド車両においては、その走行モータを減速時の運動エネルギにより駆動させて発電機として機能させることにより、バッテリを充電する回生機構を有するものがある。
この回生機構は車両速度を減速させるブレーキとして機能させることができ、各種工夫をすることが提案されている。
この回生機構は車両速度を減速させるブレーキとして機能させることができ、各種工夫をすることが提案されている。
例えば、特許文献1では、4輪の電気自動車(電動車両)における回生制御として、アクセルペダルの戻しに応じたブレーキ制動を実現することが提案されている。また、特許文献2では、ハイブリッド車両における回生制御での回生割合を減少させて摩擦制動を増加させることにより滑らかな回生制動を実現することが提案されている。また、特許文献3では、2輪の電動車両における回生制御として、モータ回転数とアクセル信号とから減速状態を判定し回生制動の強さを調整することで、回生制動モードと駆動モードとの切り換わりを滑らかにすることが提案されている。
しかしながら、これら特許文献1〜3に記載のような回生制御装置にあっては、いずれの回生機構も発電機として機能するように設定されているだけで、その回生発電に伴う回生制動力は一定である。このことから、乗員にとって回生制動力が小さ過ぎるときには、機械式ブレーキ操作を行って摩擦力による制動力も利用する場合がある。
このように回生制動力の機能時に摩擦制動力を利用するのでは、本来、回生利用することのできる運動エネルギを損失させていることに変わりない。
また、回生発電に伴う回生制動力が乗員にとって大き過ぎるときには、乗り心地が悪くなるとともに、アクセル操作をすることが余儀なくされてしまうことになり、減速するのにも拘わらずにアクセル操作をして、無駄にエネルギを浪費してしまうことになる。
そこで、本発明は、車両の減速時の回生を効率よく行うとともに、乗員の意に沿った車両の減速度合いを得ることができる車両の回生制御装置を提供することを目的としている。
このように回生制動力の機能時に摩擦制動力を利用するのでは、本来、回生利用することのできる運動エネルギを損失させていることに変わりない。
また、回生発電に伴う回生制動力が乗員にとって大き過ぎるときには、乗り心地が悪くなるとともに、アクセル操作をすることが余儀なくされてしまうことになり、減速するのにも拘わらずにアクセル操作をして、無駄にエネルギを浪費してしまうことになる。
そこで、本発明は、車両の減速時の回生を効率よく行うとともに、乗員の意に沿った車両の減速度合いを得ることができる車両の回生制御装置を提供することを目的としている。
上記課題を解決する回生制御装置に係る発明の第1の態様は、走行する車両の運動エネルギを利用して発電する発電機と共に車載されて、該発電機の発電動作により機能する回生制動を実行する回生制御装置であって、前記車両が備えるアクセルの操作量を検出するアクセル操作量検出部と、前記車両が備えるブレーキの操作量を検出するブレーキ操作量検出部と、前記アクセル操作量検出部がアクセル操作を検出していないときに前記ブレーキ操作量検出部が検出するブレーキ操作量に応じて前記発電機の発電による回生出力値を変更する回生出力変更部と、を備えることを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第2の態様は、上記第1の態様の特定事項に加え、前記回生出力変更部は、前記アクセル操作量検出部がアクセル操作を検出していないときに前記発電機に発電させて回生出力させるように予め設定されている回生出力設定値を変更することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第2の態様は、上記第1の態様の特定事項に加え、前記回生出力変更部は、前記アクセル操作量検出部がアクセル操作を検出していないときに前記発電機に発電させて回生出力させるように予め設定されている回生出力設定値を変更することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第3の態様は、上記第2の態様の特定事項に加え、前記ブレーキ操作量検出部は、アクセル操作を検出していないときの前記ブレーキの非操作位置からの当該ブレーキのブレーキ変移方向を検出する機能を備えて、前記回生出力変更部は、前記ブレーキ操作量検出部が検出する前記ブレーキ操作量と前記ブレーキ変移方向とに基づいて前記回生出力設定値を増減することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第4の態様は、上記第2または第3の態様の特定事項に加え、前記回生出力設定値として、複数種を選択利用可能に予め設定する回生出力設定部を備えて、前記回生出力設定部内に設定されている前記回生出力設定値のうちのいずれを利用するかを選択する選択部を有することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第5の態様は、上記第1から第4のいずれか1つの態様の特定事項に加え、前記ブレーキが回転軸を中心に回転自在に支持されているブレーキレバーを備えるのに対して、前記ブレーキ操作量検出部は、前記回転軸と同軸に設けられて前記ブレーキレバーの操作に伴って回転する第1回転ギヤと、前記第1回転ギヤに連動回転する該第1回転ギヤよりも小径の第2回転ギヤと、前記第2回転ギヤに配設される磁石と、前記磁石の回転量から前記第2回転ギヤの回転角を検出する磁気センサと、を備えて、前記磁気センサが検出する前記第2回転ギヤの回転角から前記ブレーキの操作量を検出することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第4の態様は、上記第2または第3の態様の特定事項に加え、前記回生出力設定値として、複数種を選択利用可能に予め設定する回生出力設定部を備えて、前記回生出力設定部内に設定されている前記回生出力設定値のうちのいずれを利用するかを選択する選択部を有することを特徴とするものである。
上記課題を解決する回生制御装置に係る発明の第5の態様は、上記第1から第4のいずれか1つの態様の特定事項に加え、前記ブレーキが回転軸を中心に回転自在に支持されているブレーキレバーを備えるのに対して、前記ブレーキ操作量検出部は、前記回転軸と同軸に設けられて前記ブレーキレバーの操作に伴って回転する第1回転ギヤと、前記第1回転ギヤに連動回転する該第1回転ギヤよりも小径の第2回転ギヤと、前記第2回転ギヤに配設される磁石と、前記磁石の回転量から前記第2回転ギヤの回転角を検出する磁気センサと、を備えて、前記磁気センサが検出する前記第2回転ギヤの回転角から前記ブレーキの操作量を検出することを特徴とするものである。
このように、本発明の上記の第1の態様によれば、アクセル操作のない回生制動時におけるブレーキ操作量に応じて回生出力値を変更することができる。したがって、アクセル操作をしていない減速時における回生制動力を調整することができ、回生効率や減速度合いを任意に調整することができる。
本発明の上記の第2の態様によれば、アクセル操作のない走行時に回生制動を発生させるように予め設定されている回生出力値をブレーキ操作量に応じて変更することができる。したがって、アクセル操作をしていない減速時に発生する回生制動力を調整することができ、初期設定されている回生出力値(回生制動力)に応じた回生効率や減速度合いを任意に調整することができる。
本発明の上記の第2の態様によれば、アクセル操作のない走行時に回生制動を発生させるように予め設定されている回生出力値をブレーキ操作量に応じて変更することができる。したがって、アクセル操作をしていない減速時に発生する回生制動力を調整することができ、初期設定されている回生出力値(回生制動力)に応じた回生効率や減速度合いを任意に調整することができる。
本発明の上記の第3の態様によれば、アクセル操作をしていないときに、ブレーキが非操作位置からブレーキ操作された変移方向とそのブレーキ操作量とに応じて設定されている回生出力値を変更することができる。したがって、ブレーキの変移方向に応じて、言い換えると、ブレーキを変移させる正逆操作に応じて減速時に発揮する回生制動力を増減させることができ、初期設定されている回生制動力に応じた回生効率や減速度合いを任意に調整することができる。
本発明の上記の第4の態様によれば、予め選択部を操作して回生制動力の大きさを選択設定することができる。したがって、好みの回生制動力で走行できるように選択することができ、予定の走行速度に応じた回生制動力を得られるように選択することができる。
本発明の上記の第5の態様によれば、2輪〜4輪のスクータやバギーなどのようにブレーキレバーを備える車両に、第1、第2回転ギヤと、磁石と、磁気センサと、を設置するだけで、ブレーキの操作量を検出可能にして、回生制御を実現することができる。したがって、安価かつ簡易に車両に搭載して、回生効率や減速度合いを任意に調整可能にすることができる。
本発明の上記の第4の態様によれば、予め選択部を操作して回生制動力の大きさを選択設定することができる。したがって、好みの回生制動力で走行できるように選択することができ、予定の走行速度に応じた回生制動力を得られるように選択することができる。
本発明の上記の第5の態様によれば、2輪〜4輪のスクータやバギーなどのようにブレーキレバーを備える車両に、第1、第2回転ギヤと、磁石と、磁気センサと、を設置するだけで、ブレーキの操作量を検出可能にして、回生制御を実現することができる。したがって、安価かつ簡易に車両に搭載して、回生効率や減速度合いを任意に調整可能にすることができる。
以下、図面を参照して、本発明の実施形態について詳細に説明する。図1〜図7は本発明に係る回生制御装置の一実施形態を搭載する車両の一例を示す図である。
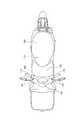
図1および図2において、車両100は、前輪101と後輪102とで自立して走行する2輪車である。車両100は、利用者が、後輪102側上部のシート103に座って、前輪101側上部のハンドル104を両手で掴んで、その間のフロア状のステップ105に両足を揃えた状態で乗車して走行する、所謂、スクータタイプに構築されている。
図1および図2において、車両100は、前輪101と後輪102とで自立して走行する2輪車である。車両100は、利用者が、後輪102側上部のシート103に座って、前輪101側上部のハンドル104を両手で掴んで、その間のフロア状のステップ105に両足を揃えた状態で乗車して走行する、所謂、スクータタイプに構築されている。
車両100は、後輪102の車軸に走行モータ111が連結されており、走行モータ111の駆動力で後輪102を回転させて走行する電動車両である。
走行モータ111は、ステップ105下のインバータ112を介してシート103下のバッテリ113に接続されており、ハンドル104の右側に配置されているアクセルグリップ115に不図示のアクセルワイヤを介して連係可能に接続されている。アクセルグリップ115にアクセルワイヤを介して接続している理由は、後述するアクセルグリップ115の操作量を検出するためである。アクセルワイヤの代わりに、アクセルグリップ115の操作量をセンサ等で検出する電子制御スロットルシステムを用いても良い。走行モータ111は、バッテリ113から電力供給を受けて後輪102を駆動させるようになっており、図4に示すコントローラ10に出力制御された電力をバッテリ113から受け取って出力(駆動力)を統括制御されるようになっている。
走行モータ111は、ステップ105下のインバータ112を介してシート103下のバッテリ113に接続されており、ハンドル104の右側に配置されているアクセルグリップ115に不図示のアクセルワイヤを介して連係可能に接続されている。アクセルグリップ115にアクセルワイヤを介して接続している理由は、後述するアクセルグリップ115の操作量を検出するためである。アクセルワイヤの代わりに、アクセルグリップ115の操作量をセンサ等で検出する電子制御スロットルシステムを用いても良い。走行モータ111は、バッテリ113から電力供給を受けて後輪102を駆動させるようになっており、図4に示すコントローラ10に出力制御された電力をバッテリ113から受け取って出力(駆動力)を統括制御されるようになっている。
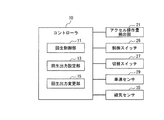
コントローラ10は、走行モータ111の統括制御を実現するために、アクセルグリップ115の操作量を検出するアクセル操作量検出部21(図4参照)を備えて、そのアクセルグリップ115の回転量に応じて走行モータ111の回転速度やトルクを調整制御する。
すなわち、車両100は、電動式2輪車に作製されており、アクセルグリップ115を加速方向に回転させることでバッテリ113から走行モータ111への電力供給を増加させて加速走行することができる。また、車両100は、アクセルグリップ115を戻す(回転状態を解除する)ことでバッテリ113から走行モータ111への電力供給を遮断して減速走行するようになる。
このとき、コントローラ10は、車両100の走行速度、所謂、車速を後輪102の回転数を検出する車速センサ29から受け取ってハンドル104の中央付近に設置されているコントロールパネル120内のスピードメータに表示するようになっている。
また、コントローラ10は、後輪102の回転(車両100の運動エネルギ)により走行モータ111を発電機として機能させてインバータ112を介してバッテリ113に回生充電するようになっており、この場合、車両100には走行モータ111の回転を制限する回生制動が働いて後輪102には回生ブレーキが効くことになる。すなわち、コントローラ10が回生制御装置を構成している。
すなわち、車両100は、電動式2輪車に作製されており、アクセルグリップ115を加速方向に回転させることでバッテリ113から走行モータ111への電力供給を増加させて加速走行することができる。また、車両100は、アクセルグリップ115を戻す(回転状態を解除する)ことでバッテリ113から走行モータ111への電力供給を遮断して減速走行するようになる。
このとき、コントローラ10は、車両100の走行速度、所謂、車速を後輪102の回転数を検出する車速センサ29から受け取ってハンドル104の中央付近に設置されているコントロールパネル120内のスピードメータに表示するようになっている。
また、コントローラ10は、後輪102の回転(車両100の運動エネルギ)により走行モータ111を発電機として機能させてインバータ112を介してバッテリ113に回生充電するようになっており、この場合、車両100には走行モータ111の回転を制限する回生制動が働いて後輪102には回生ブレーキが効くことになる。すなわち、コントローラ10が回生制御装置を構成している。
ハンドル104は、右側のアクセルグリップ115と一緒に握って前ブレーキ121を機能させる前ブレーキレバー122が配置されているとともに、左側の固定グリップ116と一緒に握って後ブレーキ123を機能させる後ブレーキレバー124が配置されている。
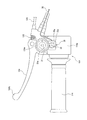
後ブレーキレバー124は、図3に示すように、ハンドル104の左側の固定グリップ116と一緒に握れるように基端部116a側に設置されている回転軸124aを中心に回転自在に軸支されている。後ブレーキレバー124は、バネ125などの弾性部材によりハンドル104の固定グリップ116から離隔して、そのバネ125を弾性変形させない非操作位置、言い換えると、後ブレーキ123が効かない状態に位置する。また、この後ブレーキレバー124は、その非操作位置からバネ125の弾性力に抗してさらに離隔させる方向に移動させることもでき、バネ125の弾性力により非操作位置を中立位置として位置するように取り付けられている。
この構造により、後ブレーキレバー124は、固定グリップ116と一緒に握ってバネ125の弾性力に抗して先端部124bを接近させるプラス方向に移動させることにより、ブレーキワイヤ126を牽引して後ブレーキ123を効かせることができる。また、後ブレーキレバー124は、握った状態から解放したときにはバネ125の弾性力で固定グリップ116から離隔させるマイナス方向に移動することになり、ブレーキワイヤ126を戻して後ブレーキ123を解放し車両100が制限なく走行することを許容する。この後ブレーキレバー124は、バネ125の弾性力に抗して固定グリップ116からさらに離隔させるマイナス方向に押した位置にも移動させることができる。
後ブレーキレバー124は、図3に示すように、ハンドル104の左側の固定グリップ116と一緒に握れるように基端部116a側に設置されている回転軸124aを中心に回転自在に軸支されている。後ブレーキレバー124は、バネ125などの弾性部材によりハンドル104の固定グリップ116から離隔して、そのバネ125を弾性変形させない非操作位置、言い換えると、後ブレーキ123が効かない状態に位置する。また、この後ブレーキレバー124は、その非操作位置からバネ125の弾性力に抗してさらに離隔させる方向に移動させることもでき、バネ125の弾性力により非操作位置を中立位置として位置するように取り付けられている。
この構造により、後ブレーキレバー124は、固定グリップ116と一緒に握ってバネ125の弾性力に抗して先端部124bを接近させるプラス方向に移動させることにより、ブレーキワイヤ126を牽引して後ブレーキ123を効かせることができる。また、後ブレーキレバー124は、握った状態から解放したときにはバネ125の弾性力で固定グリップ116から離隔させるマイナス方向に移動することになり、ブレーキワイヤ126を戻して後ブレーキ123を解放し車両100が制限なく走行することを許容する。この後ブレーキレバー124は、バネ125の弾性力に抗して固定グリップ116からさらに離隔させるマイナス方向に押した位置にも移動させることができる。
この後ブレーキレバー124は、回転軸124aと共通の軸心を有して一体回転する固定ギヤ(第1回転ギヤ)31が固定されており、この固定ギヤ31には、伝達される回転を受け取るように互いの歯面31a、33aを噛み合わせる検出ギヤ(第2回転ギヤ)33が取り付けられて連動するギヤ列が連結されている。検出ギヤ33は、固定ギヤ31よりも数分の一程度の小径に形成されて、固定ギヤ31の回転で大きく回転する。
検出ギヤ33は、磁石が埋め込まれているマグネットギヤにより構成されており、その磁力により回転角を検出する磁気センサ(ブレーキ操作量検出部)35のケース35a内に取り付けられている。磁気センサ35は、基板に固定して防水用樹脂モールドした状態で検出ギヤ33の上部または下部に設置して回転角を検出するようになっており、コントローラ10にセンサケーブル36を介して接続されている。コントローラ10は、磁気センサ35が検出する検出ギヤ33の回転角(回転量)、すなわち、後ブレーキレバー124の正逆操作量(ブレーキ変移方向)を把握できるようになっている。
検出ギヤ33は、磁石が埋め込まれているマグネットギヤにより構成されており、その磁力により回転角を検出する磁気センサ(ブレーキ操作量検出部)35のケース35a内に取り付けられている。磁気センサ35は、基板に固定して防水用樹脂モールドした状態で検出ギヤ33の上部または下部に設置して回転角を検出するようになっており、コントローラ10にセンサケーブル36を介して接続されている。コントローラ10は、磁気センサ35が検出する検出ギヤ33の回転角(回転量)、すなわち、後ブレーキレバー124の正逆操作量(ブレーキ変移方向)を把握できるようになっている。
そして、コントローラ10は、CPUやメモリ等により構築されて、予め格納されている制御プログラムに従って各種データに基づく制御処理(制御方法)を実行することにより、回生制御装置として機能する。
このコントローラ10は、図3に示すように、アクセル操作量検出部21から受け取るアクセル操作量、および、磁気センサ35から受け取るブレーキ操作量に基づいて回生制御処理を実行する回生制御部11と、走行モータ111が発電機として機能して所望の回生出力値の回生電力発電をするようにその回生駆動条件を設定する回生出力設定部13と、この回生出力設定部13に設定されている回生駆動条件を変更して回生出力設定値を変更する回生出力変更部15と、を備える(として機能する)ように構築されている。
このコントローラ10は、図3に示すように、アクセル操作量検出部21から受け取るアクセル操作量、および、磁気センサ35から受け取るブレーキ操作量に基づいて回生制御処理を実行する回生制御部11と、走行モータ111が発電機として機能して所望の回生出力値の回生電力発電をするようにその回生駆動条件を設定する回生出力設定部13と、この回生出力設定部13に設定されている回生駆動条件を変更して回生出力設定値を変更する回生出力変更部15と、を備える(として機能する)ように構築されている。
回生出力設定部13は、発電機として機能する走行モータ111の回生駆動条件を複数種設定できるように準備されており、コントロールパネル120内に配置されている制御スイッチ26と切替スイッチ(選択部)27との選択操作に従って使用する走行モータ111の回生駆動条件を特定するようになっている。制御スイッチ26は、走行モードと回生設定モードとの選択操作を入力するようになっており、走行モードの選択時には回生出力変更部15が機能しないで回生出力設定部13内の回生駆動条件の変更処理は行われず、回生設定モードの選択時に回生出力変更部15が機能して回生出力設定部13内の回生駆動条件の変更処理が行われる。切替スイッチ27は、例えば、弱、中、強などの回生制動強度の選択操作を入力するようになっており、制御スイッチ26で選択されている走行モードまたは回生設定モードでの処理対象の回生駆動条件を特定するようになっている。
この回生出力設定部13は、制御スイッチ26で走行モードを選択している際に、走行モータ111が発電機として機能する際の回生駆動条件が切替スイッチ27の選択位置(弱、中、強)毎に予め設定されており、回生制御部11はその切替スイッチ27の選択位置に応じた回生制動力(回生発電量)を発生する発電機として走行モータ111を機能させ、その発電電力をバッテリ113に充電する回生制御を実行する。
また、回生出力設定部13は、走行前にもコントロールパネル120を操作することにより、切替スイッチ27で例えば弱、中、強の回生制動強度の何れかを選択して走行モータ111の回生駆動条件を初期設定できるようになっている。これにより、回生出力設定部13では、回生制動強度(回生駆動条件)を走行前に任意設定することで、走行中における後述の後ブレーキレバー124による調整操作を少なくして利便性を向上させている。
この回生出力設定部13は、制御スイッチ26で走行モードを選択している際に、走行モータ111が発電機として機能する際の回生駆動条件が切替スイッチ27の選択位置(弱、中、強)毎に予め設定されており、回生制御部11はその切替スイッチ27の選択位置に応じた回生制動力(回生発電量)を発生する発電機として走行モータ111を機能させ、その発電電力をバッテリ113に充電する回生制御を実行する。
また、回生出力設定部13は、走行前にもコントロールパネル120を操作することにより、切替スイッチ27で例えば弱、中、強の回生制動強度の何れかを選択して走行モータ111の回生駆動条件を初期設定できるようになっている。これにより、回生出力設定部13では、回生制動強度(回生駆動条件)を走行前に任意設定することで、走行中における後述の後ブレーキレバー124による調整操作を少なくして利便性を向上させている。
回生出力変更部15は、制御スイッチ26で回生設定モードを選択している際に、切替スイッチ27の選択位置(弱、中、強)毎に、回生出力設定部13内に設定されている走行モータ111の回生駆動条件を変更する処理を実行するようになっており、走行中における後ブレーキレバー124の操作量に応じて回生出力設定部13内に設定されている切替スイッチ27の選択位置毎の回生駆動条件を変更する。
具体的には、回生出力変更部15は、制御スイッチ26で回生設定モードを選択した後、走行モードで走行が開始された後に、アクセル操作されることなく、後ブレーキレバー124を操作しないときに、切替スイッチ27の選択位置(弱、中、強)に対応する回生出力(初期回生出力)となるよう回生出力を変更する。後ブレーキレバー124が操作された場合に、その操作量に応じて回生出力設定部13で設定した初期回生出力を増減させる。
詳細を説明すると、後ブレーキレバー124の操作量は、固定ギヤ31の回転角θとして、検出ギヤ33の回転量から磁気センサ35が検出するようになっており、磁気センサ35は、後ブレーキレバー124を固定グリップ116に近接させる方向に握る(pull)方向の回転角θpullと、後ブレーキレバー124を固定グリップ116から離隔させる方向に押す(push)方向の回転角θpushと、を検出する。
なお、ここで、検出ギヤ33の歯数G2としては、次式に示すように、固定ギヤ31の正逆方向の最大回転角θpullmax〜θpushmaxの範囲の操作角θmに対応する磁気センサ35の最大検出角Sから変速比Gtを算出して固定ギヤ31の歯数G1を除算することで決定することができる。
θm=θpushmax−θpullmax
Gt=S/θm
G2=G1/Gt
詳細を説明すると、後ブレーキレバー124の操作量は、固定ギヤ31の回転角θとして、検出ギヤ33の回転量から磁気センサ35が検出するようになっており、磁気センサ35は、後ブレーキレバー124を固定グリップ116に近接させる方向に握る(pull)方向の回転角θpullと、後ブレーキレバー124を固定グリップ116から離隔させる方向に押す(push)方向の回転角θpushと、を検出する。
なお、ここで、検出ギヤ33の歯数G2としては、次式に示すように、固定ギヤ31の正逆方向の最大回転角θpullmax〜θpushmaxの範囲の操作角θmに対応する磁気センサ35の最大検出角Sから変速比Gtを算出して固定ギヤ31の歯数G1を除算することで決定することができる。
θm=θpushmax−θpullmax
Gt=S/θm
G2=G1/Gt
回生出力変更部15は、後ブレーキレバー124の操作量(操作角)θmに対応する係数Cを決定するためのグラフ(図5)と、車速センサ29が検出する車両100の車速に応じた許容最大回生制動力Trmaxを決定するためのグラフ(図6)と、が予め準備されている。
この回生出力変更部15は、次式に示すように、係数Cを乗算した許容最大回生制動力Trmaxを先回の設定回生制動力Tr0(i−1)に加算した回生制動力Tr(Tr0(i))を回生出力設定部13内に設定変更して、後ブレーキレバー124の操作量に応じた回生制動力を走行モータ111に発生させるようになっている。ただし、算出した回生制動力Trが許容最大回生制動力Trmaxを超えるような場合には、算出回生制動力Trに代えて許容最大回生制動力Trmaxを回生出力設定部13内に設定変更して、走行モータ111が損傷してしまうことを回避するようになっている。
Tr(Tr0(i))=Tr0(i−1)+C×Trmax
この回生出力変更部15は、次式に示すように、係数Cを乗算した許容最大回生制動力Trmaxを先回の設定回生制動力Tr0(i−1)に加算した回生制動力Tr(Tr0(i))を回生出力設定部13内に設定変更して、後ブレーキレバー124の操作量に応じた回生制動力を走行モータ111に発生させるようになっている。ただし、算出した回生制動力Trが許容最大回生制動力Trmaxを超えるような場合には、算出回生制動力Trに代えて許容最大回生制動力Trmaxを回生出力設定部13内に設定変更して、走行モータ111が損傷してしまうことを回避するようになっている。
Tr(Tr0(i))=Tr0(i−1)+C×Trmax
詳細には、コントローラ10は、図6のフローチャートに示すように、イグニッション(IG)がオン(ON)されたことを確認すると(ステップS11)、制御スイッチ26により回生設定モードが選択されているか否かを確認する(ステップS12)。このステップS12で回生設定モードの選択を確認した場合には、切替スイッチ27により選択されている回生強度の弱、中、強を確認して設定変更する処理対象を特定する(ステップS13)。この後には、走行モードか否かを制御スイッチ26の選択状況から確認して(ステップS14)、走行モードであることを確認するまでステップS12に戻って同様の処理を繰り返し、また、走行モードへの移行を確認したときに、回生出力設定部13内の回生制動力Trを設定変更する処理を開始する。
このとき、ステップS12において、制御スイッチ26が回生設定モードに選択されていない場合には、制御スイッチ26の選択状況から走行モードか否かを確認する(ステップS14)。
このとき、ステップS12において、制御スイッチ26が回生設定モードに選択されていない場合には、制御スイッチ26の選択状況から走行モードか否かを確認する(ステップS14)。
そして、ステップS14の走行モード確認後に回生制動力Trの設定変更処理を開始したときには、アクセル操作量検出部21が検出するアクセルグリップ115によるアクセル開度(操作量)がゼロ「0」であるか否かを確認する(ステップS21)。このステップS21において、アクセル開度がゼロでない、言い換えると、アクセルグリップ115を回転操作して定速走行または加速走行していることを確認した場合には、そのまま通常の走行制御を実行しつつ(ステップS22)ステップS21に戻って同様の処理を繰り返す。
一方、ステップS21でアクセル開度がゼロである、言い換えると、アクセルグリップ115の回転操作を解除して減速走行していることを確認した場合には、後ブレーキレバー124の操作の有無を確認する(ステップS23)。このステップS23において、後ブレーキレバー124のブレーキ操作を確認しないときには、そのまま切替スイッチ27により選択されている弱、中、強の回生強度に対応するように回生出力設定部13内の駆動条件に基づく演算処理を行う(ステップS31)。この後には、走行モータ111の回生出力制御を実行して回生制動力Trを発生させることにより減速走行を行わせつつ(ステップS32)、IG−ONの確認を行って(ステップS33)、IG−ON状態のときにはステップS21に戻って同様の処理を繰り返す。
一方、ステップS21でアクセル開度がゼロである、言い換えると、アクセルグリップ115の回転操作を解除して減速走行していることを確認した場合には、後ブレーキレバー124の操作の有無を確認する(ステップS23)。このステップS23において、後ブレーキレバー124のブレーキ操作を確認しないときには、そのまま切替スイッチ27により選択されている弱、中、強の回生強度に対応するように回生出力設定部13内の駆動条件に基づく演算処理を行う(ステップS31)。この後には、走行モータ111の回生出力制御を実行して回生制動力Trを発生させることにより減速走行を行わせつつ(ステップS32)、IG−ONの確認を行って(ステップS33)、IG−ON状態のときにはステップS21に戻って同様の処理を繰り返す。
その一方、ステップS21でアクセル開度ゼロを確認してステップS23で後ブレーキレバー124の操作を確認したときには、切替スイッチ27により選択されている弱、中、強の回生強度に対応する、その車速とブレーキ操作量に応じた回生制動力Tr(Tr0(i))を導出して回生出力設定部13内に設定変更する(ステップS24)。
このとき、その変更回生制動力Trが許容最大回生制動力Trmaxを超えているか否かを確認する(ステップS25)。このステップS25において、超えていないことを確認したときには、以降同様に、回生出力設定部13内の駆動条件に基づく演算処理を行って(ステップS31)、走行モータ111の回生制動力Trによる減速走行を行わせつつIG−ON状態のときにステップS21に戻って同様の処理を繰り返す(ステップS32、S33)。
このとき、その変更回生制動力Trが許容最大回生制動力Trmaxを超えているか否かを確認する(ステップS25)。このステップS25において、超えていないことを確認したときには、以降同様に、回生出力設定部13内の駆動条件に基づく演算処理を行って(ステップS31)、走行モータ111の回生制動力Trによる減速走行を行わせつつIG−ON状態のときにステップS21に戻って同様の処理を繰り返す(ステップS32、S33)。
また、ステップS25において、変更回生制動力Trが許容最大回生制動力Trmaxを超えていることを確認したときには、変更回生制動力Trとして許容最大回生制動力Trmaxを設定した後に(ステップS26)、以降同様に、回生出力設定部13内の駆動条件に基づく演算処理を行って(ステップS31)、走行モータ111の回生制動力Trによる減速走行を行わせつつIG−ON状態のときにステップS21に戻って同様の処理を繰り返す(ステップS32、S33)。
したがって、アクセルグリップ115を操作せずにアクセルオフしている状態で走行する際に、後ブレーキレバー124の操作量で回生出力設定部13内の回生駆動条件を変更設定することができ、走行モータ111が回生ブレーキとして機能するときの回生制動力を調整することができる。すなわち、アクセル操作をしていない減速時における回生制動力を調整することができ、回生効率や減速度合いを任意に調整することができる。
この後ブレーキレバー124は、中立位置から握って制動を掛けるプラス方向の操作に加えて、その中立位置から押したマイナス方向にも移動させて、回生制動力を加減することができる。また、この後ブレーキレバー124の操作量は、検出ギヤ(マグネットギヤ)33と磁気センサ35の簡易かつコンパクトな構造で高精度に検出することができ、安価に車両100に適用することができる。
この後ブレーキレバー124は、中立位置から握って制動を掛けるプラス方向の操作に加えて、その中立位置から押したマイナス方向にも移動させて、回生制動力を加減することができる。また、この後ブレーキレバー124の操作量は、検出ギヤ(マグネットギヤ)33と磁気センサ35の簡易かつコンパクトな構造で高精度に検出することができ、安価に車両100に適用することができる。
ここで、本実施形態では、2輪の車両100のブレーキワイヤ126で機能する機械式ブレーキ機構に搭載する場合を一例にして説明するがこれに限るものではなく、例えば、油圧式ブレーキ機構等に適用するなどしてもよい。また、左側の後ブレーキレバー124の操作に連動させる場合に限らず、右側の前ブレーキ操作に連動させるようにしてもよく、双方に連動させるようにしてもよい。さらに、ブレーキレバーに限らず、フットブレーキを備えるブレーキ機構の回生制動に適用するようにしてもよい。
本発明の範囲は、図示され記載された例示的な実施形態に限定されるものではなく、本発明が目的とするものと均等な効果をもたらすすべての実施形態をも含む。さらに、本発明の範囲は、各請求項により画される発明の特徴の組み合わせに限定されるものではなく、すべての開示されたそれぞれの特徴のうち特定の特徴のあらゆる所望する組み合わせによって画されうる。
10 コントローラ
11 回生制御部
13 回生出力設定部
15 回生出力変更部
21 アクセル操作量検出部
26 制御スイッチ
27 切替スイッチ
29 車速センサ
31 固定ギヤ
33 検出ギヤ
35 磁気センサ
100 車両
101 前輪
102 後輪
104 ハンドル
111 走行モータ
113 バッテリ
115 アクセルグリップ
116 固定グリップ
120 コントロールパネル
122 前ブレーキレバー
124 後ブレーキレバー
125 バネ
11 回生制御部
13 回生出力設定部
15 回生出力変更部
21 アクセル操作量検出部
26 制御スイッチ
27 切替スイッチ
29 車速センサ
31 固定ギヤ
33 検出ギヤ
35 磁気センサ
100 車両
101 前輪
102 後輪
104 ハンドル
111 走行モータ
113 バッテリ
115 アクセルグリップ
116 固定グリップ
120 コントロールパネル
122 前ブレーキレバー
124 後ブレーキレバー
125 バネ
Claims (5)
- 走行する車両の運動エネルギを利用して発電する発電機と共に車載されて、該発電機の発電動作により機能する回生制動を実行する回生制御装置であって、
前記車両が備えるアクセルの操作量を検出するアクセル操作量検出部と、前記車両が備えるブレーキの操作量を検出するブレーキ操作量検出部と、前記アクセル操作量検出部がアクセル操作を検出していないときに前記ブレーキ操作量検出部が検出するブレーキ操作量に応じて前記発電機の発電による回生出力値を変更する回生出力変更部と、を備えることを特徴とする回生制御装置。 - 前記回生出力変更部は、前記アクセル操作量検出部がアクセル操作を検出していないときに前記発電機に発電させて回生出力させるように予め設定されている回生出力設定値を変更することを特徴とする請求項1に記載の回生制御装置。
- 前記ブレーキ操作量検出部は、アクセル操作を検出していないときの前記ブレーキの非操作位置からの当該ブレーキのブレーキ変移方向を検出する機能を備えて、
前記回生出力変更部は、前記ブレーキ操作量検出部が検出する前記ブレーキ操作量と前記ブレーキ変移方向とに基づいて前記回生出力設定値を増減することを特徴とする請求項2に記載の回生制御装置。 - 前記回生出力設定値として、複数種を選択利用可能に予め設定する回生出力設定部を備えて、
前記回生出力設定部内に設定されている前記回生出力設定値のうちのいずれを利用するかを選択する選択部を有することを特徴とする請求項2または3に記載の回生制御装置。 - 前記ブレーキが回転軸を中心に回転自在に支持されているブレーキレバーを備えるのに対して、
前記ブレーキ操作量検出部は、前記回転軸と同軸に設けられて前記ブレーキレバーの操作に伴って回転する第1回転ギヤと、前記第1回転ギヤに連動回転する該第1回転ギヤよりも小径の第2回転ギヤと、前記第2回転ギヤに配設される磁石と、前記磁石の回転量から前記第2回転ギヤの回転角を検出する磁気センサと、を備えて、前記磁気センサが検出する前記第2回転ギヤの回転角から前記ブレーキの操作量を検出することを特徴とする請求項1から4のいずれか1項に記載の回生制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013048995A JP2014176256A (ja) | 2013-03-12 | 2013-03-12 | 回生制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013048995A JP2014176256A (ja) | 2013-03-12 | 2013-03-12 | 回生制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014176256A true JP2014176256A (ja) | 2014-09-22 |
Family
ID=51696991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013048995A Pending JP2014176256A (ja) | 2013-03-12 | 2013-03-12 | 回生制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014176256A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020026186A (ja) * | 2018-08-10 | 2020-02-20 | 日信工業株式会社 | バーハンドル車両用ブレーキ液圧制御装置 |
| KR102214582B1 (ko) * | 2019-12-04 | 2021-02-15 | 주식회사 현대케피코 | 마일드 하이브리드 시스템의 회생 제어 방법 |
| KR20210040532A (ko) * | 2019-10-04 | 2021-04-14 | 박근호 | 전기차 제동 조작 시스템 |
| KR20210088783A (ko) * | 2020-01-06 | 2021-07-15 | 박근호 | 전기차 제동 조작시스템 |
| DE102020111419A1 (de) | 2020-04-27 | 2021-10-28 | Schaeffler Technologies AG & Co. KG | Elektrofahrzeug mit einer Bremsvorrichtung sowie Verfahren zum Abbremsen des Elektrofahrzeugs |
| WO2022211152A1 (ko) * | 2021-04-01 | 2022-10-06 | 박근호 | 전기차 제동 조작 시스템 |
| US11866117B2 (en) | 2019-01-16 | 2024-01-09 | Livewire Ev, Llc | Motorcycle with virtual braking and virtual clutch |
-
2013
- 2013-03-12 JP JP2013048995A patent/JP2014176256A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020026186A (ja) * | 2018-08-10 | 2020-02-20 | 日信工業株式会社 | バーハンドル車両用ブレーキ液圧制御装置 |
| US11866117B2 (en) | 2019-01-16 | 2024-01-09 | Livewire Ev, Llc | Motorcycle with virtual braking and virtual clutch |
| KR20210040532A (ko) * | 2019-10-04 | 2021-04-14 | 박근호 | 전기차 제동 조작 시스템 |
| KR102301741B1 (ko) * | 2019-10-04 | 2021-09-27 | 박근호 | 전기차 제동 조작 시스템 |
| KR102214582B1 (ko) * | 2019-12-04 | 2021-02-15 | 주식회사 현대케피코 | 마일드 하이브리드 시스템의 회생 제어 방법 |
| KR20210088783A (ko) * | 2020-01-06 | 2021-07-15 | 박근호 | 전기차 제동 조작시스템 |
| KR102387130B1 (ko) * | 2020-01-06 | 2022-04-19 | 박근호 | 전기차 제동 조작시스템 |
| DE102020111419A1 (de) | 2020-04-27 | 2021-10-28 | Schaeffler Technologies AG & Co. KG | Elektrofahrzeug mit einer Bremsvorrichtung sowie Verfahren zum Abbremsen des Elektrofahrzeugs |
| WO2022211152A1 (ko) * | 2021-04-01 | 2022-10-06 | 박근호 | 전기차 제동 조작 시스템 |
| EP4094972A4 (en) * | 2021-04-01 | 2023-07-12 | Keun Ho Park | BRAKE MANIPULATION SYSTEM FOR AN ELECTRIC VEHICLE |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014176256A (ja) | 回生制御装置 | |
| JP6014159B2 (ja) | 電動車両の回生ブレーキ制御システム | |
| EP2910402B1 (en) | Regenerative brake control system of electric vehicle | |
| US6724165B2 (en) | Regenerative braking system for an electric vehicle | |
| JP5279390B2 (ja) | 電動自転車 | |
| JP5478739B2 (ja) | 電動車両の回生制御システム | |
| JP5850176B2 (ja) | 動力伝達装置 | |
| WO2011048636A1 (ja) | 車両の制御装置 | |
| JPH05268704A (ja) | 電気自動車 | |
| WO2013084624A1 (ja) | 電動車両 | |
| JP6229221B2 (ja) | ステアリングハンドル並びにそのステアリングハンドルを使用した自動車の制御装置及び制御方法 | |
| JP2017082884A (ja) | 車両制御装置 | |
| JPWO2014087515A1 (ja) | ハイブリッド車両用駆動装置 | |
| JP5478738B2 (ja) | 電動車両の加速制御システム | |
| JP6996402B2 (ja) | 電動パーキングブレーキシステム | |
| JP5929656B2 (ja) | 車両用制御装置 | |
| JP2006054982A (ja) | 電動モータ式カート | |
| KR102227541B1 (ko) | 제동부의 조작이 용이한 전기차 | |
| JP6202269B2 (ja) | 電動車両の制御装置 | |
| JP4024013B2 (ja) | 自走車両 | |
| CN112867629B (zh) | 可实现声音调节的电动车 | |
| WO2022004313A1 (ja) | 車両の制御装置 | |
| JP2001190008A (ja) | 電気自動車 | |
| JP2014195367A (ja) | 電動車両 | |
| JP2011088568A (ja) | 車両の制動制御装置 |