以下、本発明の一実施形態にかかる測定装置を説明する。本発明の一実施形態にかかる測定装置は、人力機械のクランクの回転運動により定義される円を含む平面と平行なクランクの面である側面に設けられた第1ひずみゲージおよび第2ひずみゲージと、第1ひずみゲージおよび第2ひずみゲージと、定電流電源が接続され、クランクがねじれる方向に生じているねじれ方向ひずみを検出する第1検出回路と、第1検出回路と、定電流電源が接続され、クランクの前記平面と垂直な方向に生じている内外方向ひずみ、または、クランクの長手方向と平行な方向に生じている引張方向ひずみのうち少なくともいずれか一方を検出する第2検出回路と、を有している。そして、第1ひずみゲージおよび第2ひずみゲージが、クランクの長手方向に対して検出方向が平行になるように設けられている。このようにすることにより、第1検出回路で検出されたねじれ方向ひずみと、第2検出回路で検出された内外方向ひずみまたは引張方向ひずみからクランクに加わっている推進力や損失力を測定することができる。したがって、簡便な方法で推進力や損失力を測定することができる。また、定電流電源を用いているので、ひずみゲージを少なくすることができる。さらに、第1および第2ひずみゲージがクランクの側面のみに設けられているので、1つの面のみで推進力や損失力を測定することができ、また、側面のうち内面側に設けることで、運転者等の足と干渉することがない。
また、第1検出回路の出力および第2検出回路の出力に基づいて、それぞれの検出回路が検出するひずみ以外に混入しているひずみ成分を補正する補正手段を有してもよい。このようにすることにより、第1検出回路や第2検出回路の出力に含まれる検出対象以外のひずみの影響を排除することができる。
また、第1検出回路および第2検出回路がブリッジ回路で構成され、第1ひずみゲージおよび第2ひずみゲージが、第1検出回路を構成するブリッジ回路において定電流電源に対して直列に接続され、第1検出回路を構成するブリッジ回路および第2検出回路を構成するブリッジ回路の第1および第2ひずみゲージ以外の抵抗素子が、固定抵抗で構成されていてもよい。このようにすることにより、ブリッジ回路により、ねじれ方向ひずみや内外方向ひずみまたは引張方向ひずみを検出することができ、簡便な回路構成で推進力や損失力を測定することができる。
また、第1検出回路が、第2検出回路を構成するブリッジ回路において、抵抗として機能するようにしてもよい。このようにすることにより、第1検出回路が第2検出回路を構成するブリッジ回路における抵抗の1つとして機能させることができる。そのため、第1検出回路が第2検出回路の一部とするような回路構成となる。
また、第1ひずみゲージと第2ひずみゲージが、互いに重ねられていてもよい。このようにすることにより、クランクに設けるひずみゲージのサイズを小さくすることができる。
また、本発明の一実施形態にかかる測定方法は、人力機械のクランクの回転運動により定義される円を含む平面と平行なクランクの面である側面に検出方向が互いに直交するとともに、検出方向の中間方向がクランクの長手方向になるように設けられた第1ひずみゲージおよび第2ひずみゲージと、第1ひずみゲージおよび第2ひずみゲージと、定電流電源が接続され、クランクがねじれる方向に生じているねじれ方向ひずみを検出する第1検出回路と、第1検出回路と、定電流電源が接続され、クランクの前記平面と垂直な方向に生じている内外方向ひずみ、または、クランクの長手方向と平行な方向に生じている引張方向ひずみのうち少なくともいずれか一方を検出する第2検出回路と、を有した測定装置により行われる処理に、第1検出回路にねじれ方向ひずみを検出させるねじれ方向ひずみ検出工程と、ねじれ方向ひずみ検出工程で検出したねじれ方向ひずみに基づいて推進力を測定する推進力測定工程と、第2検出回路に内外方向ひずみまたは引張方向ひずみのうち少なくともいずれか一方を検出させる内外方向ひずみまたは引張方向ひずみ検出工程と、内外方向ひずみまたは引張方向ひずみ検出工程で検出した内外方向ひずみまたは引張方向ひずみのうち少なくともいずれか一方に基づいて損失力を測定する損失力測定工程と、含んでいる。このようにすることにより、第1検出回路で検出されたねじれ方向ひずみと、第2検出回路で検出された内外方向ひずみまたは引張方向ひずみからクランクに加わっている推進力や損失力を測定することができる。したがって、簡便な方法で推進力や損失力を測定することができる。また、定電流電源を用いているので、ひずみゲージを少なくすることができる。さらに、第1および第2ひずみゲージがクランクの側面のみに設けられているので、1つの面のみで推進力や損失力を測定することができ、また、側面のうち内面に設けることで、運転者等の足と干渉することがない。
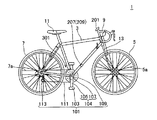
本発明の一実施例にかかる測定装置としての測定モジュール301を備えた自転車1を図1乃至図9を参照して説明する。自転車1は図1に示すように、フレーム3と、フロント車輪5と、リア車輪7と、ハンドル9と、サドル11と、フロントフォーク13と、駆動機構101と、を有している。
フレーム3は、2つのトラス構造から構成されている。フレーム3は、後方の先端部分において、リア車輪7と回転自在に接続されている。また、フレーム3の前方において、フロントフォーク13が回転自在に接続されている。
フロントフォーク13は、ハンドル9と接続されている。フロントフォーク13の下方向の先端位置において、フロントフォーク13とフロント車輪5とは回転自在に接続されている。
フロント車輪5は、ハブ部、スポーク部及びタイヤ部を有している。ハブ部はフロントフォーク13と回転自在に接続されている。そして、このハブ部とタイヤ部はスポーク部によって接続されている。
リア車輪7は、ハブ部、スポーク部及びタイヤ部を有している。ハブ部はフレーム3と回転自在に接続されている。そして、このハブ部とタイヤ部はスポーク部によって接続されている。リア車輪7のハブ部は、後述するスプロケット113と接続されている。
自転車1は、ユーザ(運転者)の足による踏み込み力を自転車1の駆動力に変換する駆動機構101を有している。駆動機構101は、ペダル103、クランク機構104、チェーンリング109、チェーン111、スプロケット113と、を有している。
ペダル103は、ユーザが踏み込むための足と接する部分である。ペダル103は、クランク機構104のペダルクランク軸115によって回転自在となるように支持されている。
クランク機構104は、クランク105とクランク軸107及びペダルクランク軸115(図2および図6参照)から構成されている。
クランク軸107はフレーム3を左右方向に(自転車側面の一方から他方に)貫通している。クランク軸107は、フレーム3によって回転自在に支持されている。
クランク105は、クランク軸107と直角に設けられている。クランク105は、一端部において、クランク軸107と接続されている。
ペダルクランク軸115は、クランク105と直角に設けられている。ペダルクランク軸115の軸方向は、クランク軸107と同一方向となっている。ペダルクランク軸115は、クランク105の他端部においてクランク105と接続されている。
クランク機構104は、このような構造を自転車1の側面の反対側にも有している。つまり、クランク機構104は、2個のクランク105及び、2個のペダルクランク軸115を有している。したがって、ペダル103も自転車1の両側面にそれぞれ有している。
これらが自転車1の右側にあるか左側にあるかを区別する場合には、それぞれ右側クランク105R、左側クランク105L、右側ペダルクランク軸115R、左側ペダルクランク軸115L、右側ペダル103R、左側ペダル103Lと記載する。
また右側クランク105Rと左側クランク105Lは、クランク軸107を中心として反対方向に延びるように接続されている。右側ペダルクランク軸115R、クランク軸107および左側ペダルクランク軸115Lは、平行かつ同一平面に形成されている。右側クランク105R及び左側クランク105Lは、平行かつ同一平面上に形成されている。
チェーンリング109は、クランク軸107に接続されている。チェーンリング109は、ギア比を変化させることができる可変ギアで構成されると好適である。また、チェーンリング109にはチェーン111が係合されている。
チェーン111はチェーンリング109及びスプロケット113に係合している。スプロケット113は、リア車輪7と接続されている。スプロケット113は、可変ギアで構成されると好適である。
自転車1は、このような駆動機構101によってユーザの踏み込み力をリア車輪の回転力に変換している。
自転車1は、サイクルコンピュータ201と、測定モジュール301と、ケイデンスセンサ501と、を有している。
サイクルコンピュータ201は、ハンドル9に配置されている。サイクルコンピュータ201は、図2に示すように、各種情報を表示するサイクルコンピュータ表示部203およびユーザの操作を受けるサイクルコンピュータ操作部205を有している。
サイクルコンピュータ表示部203に表示される各種情報とは、自転車1の速度、位置情報、目的地までの距離、目的地までの予測到達時間、出発してからの移動距離、出発してからの経過時間、推進力、損失力等である。
ここで、推進力とはクランク105の回転方向に加わる力の大きさである。一方、損失力とは、クランク105の回転方向とは別の方向に加わる力の大きさである。この回転方向とは別の方向に加わる力は、何ら自転車1の駆動に寄与しない無駄な力である。したがって、ユーザは、推進力をできるだけ増加させ、損失力をできるだけ減少させることによって、より効率的に自転車1を駆動させることが可能となる。
サイクルコンピュータ操作部205は、図2では押しボタンで示されているが、それに限らず、タッチパネルなど各種入力手段や複数の入力手段を組み合わせて用いることができる。
また、サイクルコンピュータ201は、サイクルコンピュータケイデンス無線受信部207及びサイクルコンピュータ無線受信部209を有している。サイクルコンピュータケイデンス無線受信部207及びサイクルコンピュータ無線受信部209は、配線を介してサイクルコンピュータ201の本体部分と接続されている。なお、サイクルコンピュータケイデンス無線受信部207及びサイクルコンピュータ無線受信部209は、受信のみの機能を有する必要はない。例えば、送信部としての機能を有していても良い。以下、送信部又は受信部と記載した装置も、受信機能及び送信機能の両方を有していても良い。
ケイデンスセンサ501は、クランク105に設けられた磁石503の接近を検出する磁気センサ505を有している(図3参照)。磁気センサ505は、接近する磁石503によってONになることで、磁石503の位置を検出する。つまり、磁気センサ505がONになるということは、磁気センサ505が存在する位置にクランク105も存在することとなる。このケイデンスセンサ501から、サイクルコンピュータ201は、ケイデンス[rpm]を得ることができる。
測定モジュール301は、クランク105の内面に設けられ、複数のひずみゲージ素子から構成されるひずみゲージ369(図3及び図4参照)を用いて、ペダル103にユーザが加えている人力を検出する。具体的には、クランク105の回転力であって自転車1の駆動力となる推進力と、回転方向とは別の方向に加わる力である損失力を算出する。
図3は、サイクルコンピュータ201、測定モジュール301及びケイデンスセンサ501のブロック図である。
まず、ケイデンスセンサ501のブロック構成を説明する。ケイデンスセンサ501は、磁気センサ505、ケイデンスセンサ無線送信部507、ケイデンスセンサ制御部551、ケイデンスセンサ記憶部553、ケイデンスセンサタイマ561を有している。
磁気センサ505は、磁石503が接近することによってON/OFFが切り替わる。そして、磁気センサ505がONとなると、磁気センサ505はその旨の情報信号をケイデンスセンサ制御部551に出力する。
ケイデンスセンサ無線送信部507は、ケイデンスセンサ記憶部553に記憶されているケイデンス情報を、サイクルコンピュータケイデンス無線受信部207に送信している。このケイデンスセンサ無線送信部507による送信は、ケイデンスセンサタイマ561によって命令されることによって例えば1秒ごとに行われている。または、ケイデンスセンサタイマ561の値に基づいた判断がケイデンスセンサ制御部551によって行われ、その判断に基づいて、このケイデンスセンサ無線送信部507による送信がケイデンスセンサ制御部551の命令によって行われても良い。
ケイデンスセンサ制御部551は、ケイデンスセンサ501を包括的に制御している。ケイデンスセンサ制御部551は、磁気センサ505がONとなった旨の情報信号の出力を受けると、以下の動作を行う。ケイデンスセンサ制御部551は、ケイデンスセンサタイマ561にタイマ値情報の出力を命令する。そして、ケイデンスセンサ制御部551は、ケイデンスセンサタイマ561からタイマ値情報を受けると、そのタイマ値情報からケイデンスを算出する。具体的には、タイマ値情報のカウント数(C)と1度のカウント間隔(T)を掛け合わせることによって、磁気センサ505がONとなる時間(周期)[秒]を算出する。そして、60をこの周期で割ることによって、ケイデンス[rpm]を算出する。
さらに、ケイデンスセンサ制御部551は、このケイデンス情報をケイデンスセンサ記憶部553のケイデンスセンサRAM555(後述する)に記憶させる。また、ケイデンスセンサ制御部551は、ケイデンスセンサタイマ561にカウンタ値のリセット命令を出力する。ケイデンスセンサ制御部551は、例えば1秒間の間隔で、ケイデンスセンサ無線送信部507にケイデンスセンサ記憶部553に記憶されているケイデンス情報を送信させても良い。
ケイデンスセンサ記憶部553には、各種情報が記憶される。各種情報とは、例えば、ケイデンスセンサ制御部551の制御プログラム、ケイデンスセンサ制御部551が制御する際に必要とされる一時的な情報である。特に本実施形態では、磁気センサ505がONとなる間隔であるケイデンスセンサタイマ561のタイマ値を記憶している。なお、ケイデンスセンサ記憶部553は、ケイデンスセンサRAM555及びケイデンスセンサROM557から構成されている。ケイデンスセンサRAM555にはタイマ値等が記憶され、ケイデンスセンサROM557には制御プログラム等が記憶される。
ケイデンスセンサタイマ561は、タイマカウンタであり所定周期を有するクロックを常時カウントしている。ケイデンスセンサタイマ561は、ケイデンスセンサ制御部551の値出力命令を受けると、タイマ値情報をケイデンスセンサ制御部551に出力する。また、ケイデンスセンサタイマ561は、ケイデンスセンサ制御部551のリセット命令を受けると、タイマカウンタの値を初期値にリセットする。さらに、ケイデンスセンサタイマ561は、ケイデンスセンサ無線送信部507に、送信のタイミングを命令する役割をも有している。具体的には、例えば1秒ごとに、ケイデンスセンサ無線送信部507に送信タイミングを指令している。
次に、測定モジュール301のブロック構成を説明する。測定モジュール301は、図3に示したように、測定モジュール無線送信部309、測定モジュールタイマ361、測定モジュール制御部351、測定モジュール記憶部353、測定モジュールA/D363、測定モジュールひずみ検出回路365及びひずみゲージ369を有している。
測定モジュール無線送信部309は、測定モジュール制御部351がひずみ情報から算出した推進力及び損失力情報を、サイクルコンピュータ無線受信部209に送信している。この測定モジュール無線送信部309による送信は、測定モジュールタイマ361によって命令されることによって例えば1秒ごとに行われている。または、測定モジュールタイマ361の値に基づいて測定モジュール制御部351が命令を出力することによって送信しても良い。
測定モジュールタイマ361は、タイマカウンタであり所定周期を有するクロックを常時カウントしている。さらに、測定モジュールタイマ361は、測定モジュール無線送信部309に、送信のタイミングを命令する役割をも有している。具体的には、例えば、1秒ごとに、測定モジュール無線送信部309に送信タイミングを指令している。
測定モジュール制御部351は、測定モジュール301を包括的に制御している。測定モジュール制御部351は、ひずみ情報から推進力及び損失力を算出する。算出方法は後述する。
測定モジュール記憶部353には、各種情報が記憶される。各種情報とは、例えば、測定モジュール制御部351の制御プログラム、及び、測定モジュール制御部351が制御を行う際に必要とされる一時的な情報である。特に本実施例では、ひずみ情報を記憶している。なお、測定モジュール記憶部353は、測定モジュールRAM355及び測定モジュールROM357から構成されている。測定モジュールRAM355にはひずみ情報等が記憶される。測定モジュールROM357には制御プログラム、及び、ひずみ情報から推進力及び損失力を算出するための各種のパラメータ、定数、等が記憶される。
ひずみゲージ369は、クランク105に接着されて、一体化される。ひずみゲージ369は、第1ひずみゲージ369a、第2ひずみゲージ369bから構成されている。そして、ひずみゲージ369のそれぞれの端子は、測定モジュールひずみ検出回路365に接続されている。
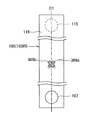
図4に、本実施例におけるひずみゲージ369のクランク105への配置を示す。ひずみゲージ369は、クランク105の内面119に接着されている。クランク105の内面とは、クランク軸107が突設されている(接続されている)面であり、クランク105の回転運動により定義される円を含む平面と平行な面(側面)である。また、図4には図示しないが、クランク105の外面120は、内面119と対向しペダルクランク軸115が突設されている(接続されている)面である。つまり、ペダル103が回転自在に設けられている面である。クランク105の上面117は、内面119および外面120と同じ方向に長手方向が延在し、かつ内面119および外面120と直交する面の一方である。クランク105の下面118は、上面117と対向する面である。
第1ひずみゲージ369aと第2ひずみゲージ369bは、互いに直交かつ重ねられて(重層して)配置されている。また、第1ひずみゲージ369aの検出方向と第2ひずみゲージ369bの検出方向との間の中間方向が、クランク105の長手方向になるように配置されている。つまり、第1ひずみゲージ369aの検出方向とクランク105の中心軸C1の方向とは45度の角度を有する。第2ひずみゲージ369bの検出方向とクランク105の中心軸C1の方向とは45度の角度を有する。また、第1ひずみゲージ369aと第2ひずみゲージ369bが重ねられた交点部分が内面119の中心軸C1上となるように配置されている。つまり、第1ひずみゲージ369aと第2ひずみゲージ369bは、中心軸C1を中心として対称となるように配置されている。
なお、第1ひずみゲージ369aおよび第2ひずみゲージ369bの配置は図4に限らない。つまり、第1ひずみゲージ369aおよび第2ひずみゲージ369bは、互いに直交し、中心軸C1と45度の関係が維持されていれば他の配置でもよい。但し、中心軸C1上に配置する方が、後述する各変形を精度良く検出できるので好ましい。
また、図4では、クランク105を単純な直方体として説明しているが、デザイン等により、角が丸められていたり、一部の面が曲面で構成されていてもよい。そのような場合でも、上述した配置を極力維持するようにひずみゲージ369を配置することで、後述する各変形を検出することができる。但し、上記した中心軸C1との関係(45度)や互いに直交している関係がずれるにしたがって検出精度が低下する。
測定モジュールひずみ検出回路365は、第1ひずみゲージ369a、第2ひずみゲージ369bが接続されて、ひずみゲージ369のひずみ量が電圧として出力される。測定モジュールひずみ検出回路365の出力は、測定モジュールA/D363によって、アナログ情報からデジタル情報であるひずみ情報に変換される。そして、ひずみ情報信号は測定モジュール記憶部353に出力される。測定モジュール記憶部353に入力されたひずみ情報信号は、測定モジュールRAM355にひずみ情報として記憶される。
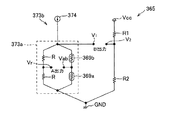
測定モジュールひずみ検出回路365を図5に示す。測定モジュールひずみ検出回路365は、2つのブリッジ回路である第1検出回路373aと第2検出回路373bとで構成されている。第1検出回路373aの第1系統側では、定電流電源374側から順に、第2ひずみゲージ369b、第1ひずみゲージ369aの順に接続されている。即ち、第1ひずみゲージ369aおよび第2ひずみゲージ369bが定電流電源374に対して直列に接続されている。第2系統側では、定電流電源374側から順に、固定抵抗R、固定抵抗Rの順に接続されている。第2検出回路373bの第1系統側では、定電流電源374に、第1検出回路373aが接続されている。即ち、第1ひずみゲージ369aおよび第2ひずみゲージ369bが、第1検出回路373aを構成するブリッジ回路において定電流電源374に対して直列に接続されている。第2系統側では、定電圧電源Vccから順に、固定抵抗R1、固定抵抗R2の順に接続されている。また、第1検出回路373aは、第2検出回路373bを構成するブリッジ回路において、抵抗として機能する。つまり、第1検出回路373aが第2検出回路373bを構成するブリッジ回路における抵抗の1つとして機能させている。
第1検出回路373aは、定電流電源374側が直接接続されている。このようにすることで、第1ひずみゲージ369aと第2ひずみゲージ369bの抵抗値の変化が後述するB出力において直接取り出せることができる。つまり、定電流電源374とすることで、後述する電位V1(図5参照)が第1検出回路373aの動作に応じて変化することができるので、電源と第1検出回路373aとの間にひずみゲージ素子を設ける必要が無くなる。なお、2つの固定抵抗Rは同じ抵抗値を有している。また、第1ひずみゲージ369aおよび第2ひずみゲージ369bは同じ抵抗値を有している。また、固定抵抗R1とR2は、無負荷の状態で後述するV2(図5参照)の電位が、V1(図5参照)の電位と同じ電位となるような抵抗値とすることが望ましい。
ひずみゲージ369の抵抗値は、公知のように圧縮されている場合には抵抗値が下がり、伸長されている場合には抵抗値が上がる。この抵抗値の変化は、変化量がわずかな場合には比例している。また、ひずみゲージ369の検出方向は、配線が伸びている方向であり、上述したように第1ひずみゲージ369a、第2ひずみゲージ369bが、中心軸C1と平行な方向となる。この検出方向以外において圧縮又は伸長が生じた場合には、ひずみゲージ369に抵抗値の変化は生じない。
このような特性を持つひずみゲージ369を使用した第1検出回路373aは、第1ひずみゲージ369aと第2ひずみゲージ369bの検出方向で圧縮または伸長されていない場合は、第1ひずみゲージ369aと第2ひずみゲージ369bとの間の電位Vabと、2つの固定抵抗Rの間の電位Vrとの電位差はほぼゼロとなる。
第1ひずみゲージ369aが圧縮され、第2ひずみゲージ369bが伸張された場合は、第1ひずみゲージ369aの抵抗値が減少して第2ひずみゲージ369bの抵抗値が増加するために、電位Vabが低くなり、電位Vrは変化しない。つまり、電位Vabと電位Vrとの間に電位差が発生する。第1ひずみゲージ369aが伸張され、第2ひずみゲージ369bが圧縮された場合は、第1ひずみゲージ369aの抵抗値が増加して第2ひずみゲージ369bの抵抗値が減少するために、電位Vabが高くなり、電位Vrは変化しない。つまり、電位Vabと電位Vrとの間に電位差が発生する。
第1ひずみゲージ369a、第2ひずみゲージ369bともに圧縮された場合は、第1ひずみゲージ369a、第2ひずみゲージ369bともに抵抗値が減少するために、電位Vabと、電位Vrとの電位差はほぼゼロとなる。第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張された場合は、第1ひずみゲージ369a、第2ひずみゲージ369bともに抵抗値が増加するために、電位Vabと、電位Vrとの電位差はほぼゼロとなる。
第2検出回路373bは、第1検出回路373aの第1ひずみゲージ369a、第2ひずみゲージ369bの抵抗値が増加した場合は、定電流電源374と第1検出回路373aとの間の電位V1が高くなり、固定抵抗R1と固定抵抗R2との間の電位V2は変化しない。つまり、電位V1と電位V2との間に電位差が発生する。第1検出回路373aの第1ひずみゲージ369a、第2ひずみゲージ369bの抵抗値が減少した場合は、電位V1が低くなり、電位V2は変化しない。つまり、電位V1と電位V2との間に電位差が発生する。第1検出回路373aの第1ひずみゲージ369a、第2ひずみゲージ369bの抵抗値がいずれも変化しない、または、一方が増加して他方が減少する場合は、電位V1、V2とも変化しない。つまり、電位V1と電位V2との電位差はほぼゼロとなる。
そこで、第1検出回路373aの電位Vabが測定できる第1ひずみゲージ369aと第2ひずみゲージ369bとの接続点と、電位Vrが測定できる2つの固定抵抗Rの接続点と、を第1検出回路373aの出力(以降A出力)とする。第2検出回路373bの電位V1が測定できる定電流電源374と第1検出回路373aとの接続点と、電位V2が測定できる固定抵抗R1と固定抵抗R2との接続点と、を第2検出回路373bの出力(以降B出力)とする。このA出力とB出力がひずみ情報となる。
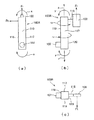
図6は、ユーザにより力(踏力)が加えられた際の右側クランク105Rの変形状態を示している。(a)は右クランク105Rの上面117から見た平面図、(b)は右側クランク105Rの内面119から見た平面図、(c)は右側クランク105Rのクランク軸107側の端部から見た平面図である。なお、以降の説明では右側クランク105Rで説明するが、左側クランク105Lでも同様である。
ユーザの足からペダル103を介して踏力が加えられると、その踏力はクランク105の回転力となる、クランク105の回転の接線方向の力である推進力Ftと、クランク105の回転の法線方向の力である損失力Frとに分けられる。このとき、右側クランク105Rには、曲げ変形x、曲げ変形y、引張変形z、ねじれ変形rzの各変形状態が生じる。
曲げ変形xは、図6(a)に示したように、右側クランク105Rが上面117から下面118に向かって、或いは下面118から上面117に向かって曲がるように変形することであり、推進力Ftによって生じる変形である。即ち、クランク105の回転方向に発生する変形によるひずみ(クランク105の回転方向に生じているひずみ)を検出することとなり、曲げ変形xの検出によってクランク105に生じている回転方向ひずみが検出できる。曲げ変形yは、図6(b)に示したように、右側クランク105Rが外面120から内面119に向かって、或いは内面119から外面120に向かって曲がるように変形することであり、損失力Frによって生じる変形である。即ち、クランク105の外面120から内面119、または内面119から外面120に向かって発生する変形によるひずみ(右側クランク105Rの回転運動により定義される円と同一平面と垂直な方向の生じているひずみ)を検出することとなり、曲げ変形yの検出によってクランク105に生じている内外方向ひずみが検出できる。
引張変形zは、右側クランク105Rが長手方向に伸張または圧縮されるように変形することであり、損失力Frによって生じる変形である。即ち、クランク105が長手方向に引っ張られるまたは押される方向に発生する変形によるひずみ(長手方向と平行な方向に生じているひずみ)を検出することとなり、引張変形zの検出によってクランク105に生じている引張方向ひずみが検出できる。ねじれ変形rzは、右側クランク105Rが、ねじれるように変形することであり、推進力Ftによって生じる変形である。即ち、クランク105がねじれる方向に発生する変形によるひずみを検出することとなり、ねじれ変形rzの検出によってクランク105に生じているねじり方向ひずみが検出できる。なお、図6は、曲げ変形x、曲げ変形y、引張変形z、ねじれ変形rzの変形方向を矢印で示したが、上述したように、この矢印と逆方向に各変形が発生する場合もある。
したがって、推進力Ftを測定するためには、曲げ変形xまたはねじれ変形rzのいずれか、損失力Frを測定するためには、曲げ変形yまたは引張変形zのいずれかを定量的に検出すればよい。
ここで、図4のように配置され、図5のように第1ひずみゲージ369a、第2ひずみゲージ369bが接続された測定モジュールひずみ検出回路365によって、曲げ変形x、曲げ変形y、引張変形z、ねじれ変形rzを検出(測定)する方法を説明する。
まず、第1検出回路373aのA出力において、各変形がどのように検出(測定)されるかを説明する。曲げ変形xは、右側クランク105Rが上面117から下面118に向かって、或いはその逆方向に変形する。右側クランク105Rが上面117から下面118に向かって変形する場合、図7に示したように、第1ひずみゲージ369aの一端は伸張されるが、他端は圧縮される。その結果、第1ひずみゲージ369a内部で伸長及び圧縮の両方が生じ第1ひずみゲージ369aの抵抗値は変化しない。第2ひずみゲージ369bも同様である。そのため、第1検出回路373aのA出力はゼロとなる。また、右側クランク105Rが下面118から上面117に向かって変形する場合も同様に、第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張及び圧縮の両方が生じ抵抗値は変化しない。そのため、第1検出回路373aのA出力はゼロとなる。
曲げ変形yは、右側クランク105Rが外面120から内面119に向かって、或いはその逆方向に変形する。右側クランク105Rが外面120から内面119に向かって変形する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張されるので、どちらも抵抗値が増加する。そのため、第1検出回路373aのA出力はゼロとなる。また、右側クランク105Rが内面119から外面120に向かって変形する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに圧縮されるので、どちらも抵抗値が減少する。そのため、第1検出回路373aのA出力はゼロとなる。
引張変形zは、右側クランク105Rが長手方向に伸張または圧縮されるように変形する。右側クランク105Rが伸張する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに圧縮されるので、どちらも抵抗値が減少する。そのため、第1検出回路373aのA出力はゼロとなる。また、右側クランク105Rが圧縮する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張されるので、どちらも抵抗値が増加する。そのため、第1検出回路373aのA出力はゼロとなる。
ねじれ変形rzは、右側クランク105Rが、ねじれるように変形する。右側クランク105Rが図6(b)の矢印の方向にねじれる場合、第1ひずみゲージ369aは伸張されるので抵抗値が増加し、第2ひずみゲージ369bは圧縮されるので抵抗値が減少する。そのため、第1検出回路373aのA出力は正出力(電位Vabが高く電位Vrが低い)となる。また、右側クランク105Rが図6(b)の矢印と逆方向にねじれる場合、第1ひずみゲージ369aは圧縮されるので抵抗値が減少し、第2ひずみゲージ369bは伸張されるので抵抗値が増加する。そのため、第1検出回路373aのA出力は負出力(電位Vabが低く電位Vrが高い)となる。
以上のように、A出力からは、ねじれ変形rzのみが検出される。即ち、第1検出回路373aは、第1ひずみゲージ369aおよび第2ひずみゲージ369bが接続され、クランク105に生じているねじれ方向ひずみを検出する。
次に、第2検出回路373bのB出力において、各変形がどのように検出(測定)されるかを説明する。曲げ変形xは、右側クランク105Rが上面117から下面118に向かって、或いはその逆方向に変形する。右側クランク105Rが上面117から下面118に向かって変形する場合、上述したように、第1ひずみゲージ369a、第2ひずみゲージ369bともに内部で伸張及び圧縮の両方が生じ抵抗値は変化しない。そのため、電位V1は変化しないため、第2検出回路373bのB出力はゼロとなる。また、右側クランク105Rが下面118から上面117に向かって変形する場合も同様に、第1ひずみゲージ369a、第2ひずみゲージ369bともに内部で伸張及び圧縮の両方が生じ抵抗値は変化しない。そのため、電位V1は変化しないため、第2検出回路373bのB出力はゼロとなる。
曲げ変形yは、右側クランク105Rが外面120から内面119に向かって、或いはその逆方向に変形する。右側クランク105Rが外面120から内面119に向かって変形する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張されるので、どちらも抵抗値が増加する。そのため、第2検出回路373bのB出力は正出力(電位V1が高く電位V2が低い)となる。また、右側クランク105Rが内面119から外面120に向かって変形する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに圧縮されるので、どちらも抵抗値が減少する。そのため、第2検出回路373bのB出力は負出力(電位V1が低く電位V2が高い)となる。
引張変形zは、右側クランク105Rが長手方向に伸張または圧縮されるように変形する。右側クランク105Rが伸張する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに圧縮されるので、どちらも抵抗値が減少する。そのため、第2検出回路373bのB出力は負出力となる。また、右側クランク105Rが圧縮する場合、第1ひずみゲージ369a、第2ひずみゲージ369bともに伸張されるので、どちらも抵抗値が増加する。そのため、第2検出回路373bのB出力は正出力となる。
ねじれ変形rzは、右側クランク105Rが、ねじれるように変形する。右側クランク105Rが図6(b)の矢印の方向にねじれる場合、第1ひずみゲージ369aは伸張されるので抵抗値が増加し、第2ひずみゲージ369bは圧縮されるので抵抗値が減少する。そのため、第2検出回路373bのB出力はゼロとなる。また、右側クランク105Rが図6(b)の矢印と逆方向にねじれる場合、第1ひずみゲージ369aは圧縮されるので抵抗値が減少し、第2ひずみゲージ369bは伸張されるので抵抗値が増加する。そのため、第2検出回路373bのB出力はゼロとなる。
以上のように、B出力からは、曲げ変形y、引張変形zが検出される。即ち、第2検出回路373bは、第1検出回路373aと、定電流電源374が接続され、クランク105に生じている内外方向ひずみまたは引張方向ひずみを検出する。
そして、第1検出回路373aのA出力と、第2検出回路373bのB出力から、推進力Ftは次の(1)式により、損失力Frは次の(2)式によりそれぞれ算出する。なお、引張変形zは曲げ変形yと比較すると非常に小さいので無視することができる。
Ft=p(A−A0)+q(B−B0)[kgf]・・・(1)
Fr=s(A−A0)+u(B−B0)[kgf]・・・(2)
ここで、Aは推進力Ft(あるいは損失力Fr)を算出する時点におけるA出力値、A0は無負荷時のA出力値、Bは推進力Ft(あるいは損失力Fr)を算出する時点におけるB出力値、B0は無負荷時のB出力値、p、q、s、uは係数であり、次の(3)〜(6)式からなる連立方程式により算出される値である。
m=p(Am−A0)+q(Be−B0)・・・(3)
0=s(Am−A0)+u(Be−B0)・・・(4)
0=p(Ae−A0)+q(Bm−B0)・・・(5)
m=s(Ae−A0)+u(Bm−B0)・・・(6)
ここで、Amはクランク105の角度が水平前向き(クランク105で水平かつフロント車輪5方向に延在している状態)でペダル103にm[kg]を載せたときのA出力値である。Beはクランク105の角度が水平前向きでペダル103にm[kg]を載せたときのB出力値である。Aeはクランク105の角度が垂直下向き(クランク105で鉛直かつ地面方向に延在している状態)でペダル103にm[kg]を載せたときのA出力値である。Bmはクランク105の角度が垂直下向きでペダル103にm[kg]を載せたときのB出力値である。
係数p、q、s、uおよびA0、B0は予め算出又は測定可能な値であるので、AおよびBを(1)式および(2)式に代入することで推進力Ftおよび損失力Frが算出できる。
また、(1)式ではB出力を用いてA出力の補正をしている。(2)式ではA出力を用いてB出力の補正をしている。即ち、各式の算出を行っている測定モジュール制御部351が補正手段して機能している。これにより、第1検出回路373aや第2検出回路373bに含まれる検出対象以外のひずみの影響を排除することができる。なお、第1ひずみゲージ369aと第2ひずみゲージ369bがクランク方向(中心軸C1と平行な方向)にずれが無い場合、Ae=A0となりB出力による補正の必要がなくなる。また、本実施例の場合常にBe=B0となるのでA出力による補正は必要がなくなる。
次に、サイクルコンピュータ201のブロック構成を説明する。サイクルコンピュータ201は、図3に示したように、サイクルコンピュータ表示部203、サイクルコンピュータ操作部205、サイクルコンピュータケイデンス無線受信部207、サイクルコンピュータ無線受信部209、サイクルコンピュータタイマ261、サイクルコンピュータ記憶部253及びサイクルコンピュータ制御部251を有している。
サイクルコンピュータ表示部203は、ユーザの指示等に基づいて、各種の情報を表示する。本実施例においては、推進力と損失力を視覚化して表示する。なお、視覚化の方法はどのような方法であっても良い。サイクルコンピュータ表示部203における、視覚化の方法は、例えば、ベクトル表示、グラフ表示、色分け表示、記号の表示、3次元表示等がありえ、どのような方法であってもよい。また、それらの組み合わせ等であってよい。
サイクルコンピュータ操作部205は、ユーザの指示(入力)を受ける。例えば、サイクルコンピュータ操作部205は、ユーザから、サイクルコンピュータ表示部203に表示内容の指示を受ける。
サイクルコンピュータケイデンス無線受信部207は、ケイデンスセンサ501から送信されるケイデンス情報を受信する。
サイクルコンピュータ無線受信部209は、測定モジュール301から送信される推進力及び損失力情報を受信する。
サイクルコンピュータタイマ261は、タイマカウンタでありタイマをカウントしている。サイクルコンピュータタイマ261によって生成されるこのタイマ値情報はサイクルコンピュータ制御部251等が様々に利用している。
サイクルコンピュータ記憶部253には、各種情報が記憶される。各種情報とは、例えば、サイクルコンピュータ制御部251の制御プログラム、及び、サイクルコンピュータ制御部251が制御を行う際に必要とされる一時的な情報である。なお、サイクルコンピュータ記憶部253は、サイクルコンピュータRAM255及びサイクルコンピュータROM257から構成されている。サイクルコンピュータROM257には制御プログラム、及び、推進力および損失力をサイクルコンピュータ表示部203に視覚的に表示するデータに変換するための各種のパラメータ、定数、等が記憶されている。
サイクルコンピュータ制御部251は、サイクルコンピュータ201を包括的に制御している。さらに、ケイデンスセンサ501及び測定モジュール301をも包括的に制御していても良い。サイクルコンピュータ制御部251は、推進力および損失力をサイクルコンピュータ表示部203に視覚的に表示するデータに変換する。
次に、ケイデンスセンサ501の処理と、測定モジュール301およびサイクルコンピュータ201の処理を、図8及び図9を参照して説明する。
まず、ケイデンスセンサ501の処理を説明する。ステップST51において、ケイデンスセンサ501のケイデンスセンサ制御部551は、磁気センサ505のONへの変化を検出する。そして、ケイデンスセンサ制御部551は、磁気センサ505の変化を検出すると処理の割り込みを行い、ステップST53以下の処理を開始する。割り込みとは、それまでの処理を中断して、指定された処理を実行することをいう。
次に、ステップST53において、ケイデンスセンサ制御部551は、ケイデンス値を算出する。ケイデンスセンサ制御部551は、タイマ値情報のカウント数(C)と1度のカウント間隔(T)をかけあわせることによって、磁気センサ505がONとなる時間(周期)[秒]を算出する。そして、ケイデンスセンサ制御部551は、60をこの時間(周期)で割ることによって、ケイデンス[rpm]を算出する。さらに、ケイデンスセンサ制御部551は、このケイデンス情報をケイデンスセンサ記憶部553のケイデンスセンサRAM555に記憶させる。
次に、ステップST55において、ケイデンスセンサ制御部551は、ケイデンスセンサタイマ561にカウンタ値のリセット命令を出力する。これで、ケイデンスセンサ制御部551の制御のメインフローは終了する。そして、次に磁気センサ505がONになると割り込みを再び行い、ステップST51から処理を再開する。
一方、ステップST57においては、ケイデンスセンサ制御部551は、ケイデンスセンサ記憶部553に記憶されているケイデンス情報を、ケイデンスセンサ無線送信部507を用いて、サイクルコンピュータ201に送信する。なお、ケイデンスセンサ制御部551を介さずに、ケイデンスセンサ無線送信部507のみによって送信を行っても良い。
次に、ステップST59において、ケイデンスセンサ制御部551は、1秒間ウェイトしている。なお、ウェイトの時間は可変である。
次に、測定モジュール301等の処理を説明する。ステップST11において、測定モジュールA/D363は、測定モジュールひずみ検出回路365からの出力(A出力、B出力)を、アナログ値からデジタル値にA/D変換する。即ち、本ステップが、第1検出回路373aにねじれ方向ひずみを検出させるねじれ方向ひずみ検出工程および第2検出回路373bに内外方向ひずみまたは引張方向ひずみのうち少なくともいずれか一方を検出させる内外方向ひずみまたは引張方向ひずみ検出工程として機能する。
次に、ステップST13において、測定モジュールA/D363が検出(変換)したひずみ情報は、測定モジュール記憶部353の測定モジュールRAM355に記憶される。
次に、ステップST15において、処理は、1/N秒間ウェイトする。ここで、Nの値は、一秒間に測定するデータポイントの数である。つまり、Nの値が大きいほど、ひずみ情報の数が多く、秒単位の分解能が高いことを意味する。N値は大きいほどよいが、N値をあまり大きくすると測定モジュールRAM355が大きな容量のものでなければならず、コストの増加になる。したがって、N値をどの程度とするかは、コスト、必要とされる時間分解能及び測定モジュールA/D363がA/D変換するのに必要とされる時間等によって決定され得る。ステップST15の処理が終了すると、ステップST11の処理に再び戻る。つまり、1秒間にN回のステップST11〜ステップST15の処理を繰り返し行う。
また、測定モジュール制御部351は、図9(b)の処理をおこなう。ステップST31において、測定モジュール制御部351は、ひずみ情報のデータ退避を行う。その理由を説明する。まず、測定モジュール記憶部353の測定モジュールRAM355の容量には限りがある。ここで、測定モジュールRAM355の容量を大きくすればひずみ情報のデータ退避は必要なくなるが、あまり余裕を持たせて設計するとコストの増加をもたらし適切ではない。また、ひずみ情報は連続的に次々書き込まれるため、データ退避を行わないと、後述するステップST33での処理によって推進力Ft及び損失力Frを計算する前に、新たな情報が上書きされてしまうおそれがあるからである。
次に、ステップST33において、測定モジュール制御部351は推進力Ft及び損失力Frを算出する。具体的には、測定モジュール制御部351は、上述した(1)式および(2)式により推進力Ft及び損失力Frを算出する。さらに、測定モジュール制御部351は、この推進力Ft及び損失力FrをN個算出しその平均を算出する。つまり、測定モジュール制御部351は、1秒間の推進力Ft及び損失力Frの平均(平均推進力及び平均損失力)を算出する。即ち、本ステップが、ねじれ方向ひずみ検出工程で検出したねじれ方向ひずみに基づいて推進力を測定する推進力測定工程および、内外方向ひずみまたは引張方向ひずみ検出工程で検出した内外方向ひずみまたは引張方向ひずみのうち少なくともいずれか一方に基づいて損失力を測定する損失力測定工程として機能する。
次に、ステップST35において、測定モジュール制御部351は、測定モジュール無線送信部309を介して、算出された平均推進力及び平均損失力を送信する。送信された平均推進力及び平均損失力は、サイクルコンピュータ201のサイクルコンピュータ無線受信部209によって受信される。
次に、ステップST37において、1秒ウェイトする。なお、1秒は一例であり必要に応じて可変である。ステップST37の処理が終了すると、ステップST31の処理に再び戻る。つまり、1秒間に1回のステップST31〜ステップST35の処理を繰り返し行う。
また、サイクルコンピュータ201のサイクルコンピュータ制御部251は、図9(c)の処理をおこなう。ステップST71において、サイクルコンピュータ制御部251は、平均推進力、平均損失力及びケイデンス情報を受信すると割り込みが行われる。つまり、サイクルコンピュータ無線受信部209が平均推進力、平均損失力及びケイデンス情報を受信したことをサイクルコンピュータ制御部251が検出した時には、サイクルコンピュータ制御部251は、それまでの処理を中断(割り込み)し、ステップST73以下の処理を開始する。
次に、ステップST73において、サイクルコンピュータ制御部251は、サイクルコンピュータ表示部203に平均推進力と平均損失力及びケイデンスを表示させる。サイクルコンピュータ表示部203は、平均推進力と平均損失力及びケイデンス情報を数値として表示、又は、その他の視覚化・聴覚化・触覚化した方法によってユーザに伝達する。
次に、ステップST75において、サイクルコンピュータ制御部251は、平均推進力と平均損失力及びケイデンス情報をサイクルコンピュータ記憶部253のサイクルコンピュータRAM255に記憶する。その後、サイクルコンピュータ制御部251は、再びステップST51の割り込みが行われるまで他の処理を行う。
本実施例によれば、測定モジュール301は、自転車1のクランク105の内面119に設けられた第1ひずみゲージ369aおよび第2ひずみゲージ369bと、第1ひずみゲージ369aおよび第2ひずみゲージ369bと定電流電源374が接続され、クランク105に生じているねじれ変形rzを検出する第1検出回路373aと、第1検出回路373aと、定電流電源374が接続され、クランク105に生じている曲げ変形yおよび引張変形zを検出する第2検出回路373bと、を有している。そして、第1ひずみゲージ369aおよび第2ひずみゲージ369bが、検出方向が互いに直交するとともに、第1ひずみゲージ369aおよび第2ひずみゲージ369bの検出方向の中間方向がクランク105の長手方向にとなるように設けられている。このようにすることにより、第1検出回路373aで検出されたねじれ変形rzと、第2検出回路373bで検出された曲げ変形yおよび引張変形zからクランク105に加わっている推進力Ftや損失力Frを測定することができる。したがって、簡便な方法で推進力Ftや損失力Frを測定することができる。また、定電流電源374を用いているので、ひずみゲージの素子数を少なくすることができる。さらに、第1ひずみゲージ369aおよび第2ひずみゲージ369bがクランク105の内面119のみに設けられているので、1つの面のみで推進力Ftや損失力Frを測定することができ、また、内面119に設けることで、ユーザの足と干渉することがない。
また、第1検出回路373aおよび第2検出回路373bがブリッジ回路で構成され、第1ひずみゲージおよび第2ひずみゲージが、第1検出回路373aを構成するブリッジ回路において定電流電源374に対して直列に接続され、さらに、第1検出回路373aを構成するブリッジ回路および第2検出回路373bを構成するブリッジ回路の第1ひずみゲージ369aおよび第2ひずみゲージ369b以外の抵抗素子が、固定抵抗R、固定抵抗R1および固定抵抗R2で構成されているので、ブリッジ回路により、曲げ変形xや曲げ変形yおよび引張変形zを検出することができ、簡便な回路構成で推進力Ftや損失力Frを測定することができる。
また、第1ひずみゲージ369aおよび第2ひずみゲージ369bが、互いに重ねられているので、ひずみゲージ369のサイズを小さくすることができる。
なお、第1ひずみゲージ369aと第2ひずみゲージ369bを重ねずに個別に配置してもよい。
また、第1検出回路373aにおいて、第1ひずみゲージ369aと第2ひずみゲージ369bは接続順序が逆であってもよい。
また、上述した実施例では、サイクルコンピュータ201は1秒毎の平均推進力と平均損失力を表示していたが、例えば、クランク105の回転角度(30°など)毎に平均推進力と平均損失力を算出してその大きさを矢印等で表示するようにしてもよい。クランク105の回転角度は、例えばクランクギアの外周部近傍に狭装された、発光部と受光部とを有する光学式の回転検出センサからなり、発光部と受光部との間を通過するギアの歯の数をカウントし、このカウント値とギアの歯数との比を求めることで、回転角度を検出する方法や、ポテンションメータ等の既存のセンサにより検出する方法等が挙げられる。
また、算出された推進力Ftや損失力Frからクランク105の回転角度ごとの伝達効率を算出して表示しても良い。伝達効率とは、ペダル103に作用する力に対する推進力Ftの寄与率であり、ペダリング状態を示す指標となる。また、伝達効率に所定の閾値を設定し、その閾値以下である場合は、ペダリング状態が悪く、非効率的であると判定し、その結果を図形等により表示してもよい。
また、上述した実施例において、右側クランク105Rにひずみゲージ369を設けていたが、左側クランク105Lにも設けることが可能である。これによって、ユーザは、左右のペダリングバランスを知ることが可能となる。
また、クランク105の製造過程においてひずみゲージ369を、クランク105の内部に埋め込んでも良い。また、クランク105が中空構造の場合には、ひずみゲージ369を中空の内側に接着しても良い。これらの方法によると、クランク105の外観を害せずにひずみゲージ369を配置することができる。また、ひずみゲージ369が外部に露出しないことから、ひずみゲージ369の耐久性を向上させることが可能となる。
また、図4では、ひずみゲージ369がクランク105の中央近傍に設けられているように記載しているが、ペダル103寄りやクランク軸107寄りに設けてもよい。ペダル103寄りに設けるとクランク105のひずみ量が小さいためにひずみゲージ369の寿命を延ばすことができる。クランク軸107寄りに設けるとてこの原理によりひずみゲージ369の出力が大きくなりノイズの影響を小さくすることができる。
また、ひずみゲージ369をクランク105の内面119に設けたが、外面120に設けてもよい。但し、外面120に設けた場合ユーザの足と緩衝する可能性があるので、内面119に設けたほうが好ましい。
また、ひずみゲージ369は、それぞれ1つの素子で構成するに限らず、複数素子から構成してもよい。また、ひずみゲージ369の抵抗値も全て同じに限らないが、各ひずみゲージ369や固定抵抗R、固定抵抗R1および固定抵抗R2は、各変形を検出した際に正出力や負出力が出力される関係となる抵抗値としなければならない。
本発明おける人力機械とは、自転車1、フィットネスバイク等のクランク105を備えた人力で駆動される機械をいう。つまり、クランク105を備えた人力で駆動(必ずしも場所的な移動をする必要はない)される機械であれば、人力機械はどの様なものであっても良い。
本発明における測定装置とは、サイクルコンピュータ201の一部であってもよいし、他の独立した装置であっても良い。さらに、物理的に別れた複数の装置の集合体であっても良い。場合によっては、ひずみゲージ369(測定モジュールひずみ検出回路365)以外は通信を介することとし全く別の場所にある装置であってもよい。つまり、測定モジュール301は、本発明における測定装置の一例である。
また、本発明は上記実施例に限定されるものではない。即ち、当業者は、従来公知の知見に従い、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。かかる変形によってもなお本発明の測定装置の構成を具備する限り、勿論、本発明の範疇に含まれるものである。