JP2014119087A - カム機構の制御装置 - Google Patents
カム機構の制御装置 Download PDFInfo
- Publication number
- JP2014119087A JP2014119087A JP2012276597A JP2012276597A JP2014119087A JP 2014119087 A JP2014119087 A JP 2014119087A JP 2012276597 A JP2012276597 A JP 2012276597A JP 2012276597 A JP2012276597 A JP 2012276597A JP 2014119087 A JP2014119087 A JP 2014119087A
- Authority
- JP
- Japan
- Prior art keywords
- cam
- displacement amount
- calculated
- information
- control shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Transmission Devices (AREA)
Abstract
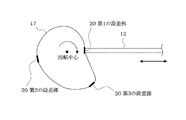
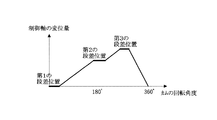
【解決手段】カム17の外周面に段差部20(カム17の回転時に制御軸12の変位量の傾きが他の部分と異なるように形成された部分)を設け、モータの回転中に、回転角センサの出力信号に基づいて制御軸12の変位量を算出すると共にカム17の角速度情報(例えば角速度や角加速度等)を算出して、カム17の角速度情報に基づいてカム17の回転位置が段差部20で制御軸12と当接する段差位置であるか否かを判定し、カム17の回転位置が段差位置であると判定されたときに、予め記憶した段差位置における実際の変位量と回転角センサの出力信号に基づいて算出された制御軸12の変位量算出値との差を制御軸12の変位量算出値の誤差として算出する。
【選択図】図2
Description
まず、図1に基づいて可変バルブ制御システム全体の概略構成を説明する。
可変バルブ装置11には、制御軸12(制御部材)を軸方向に変位させるアクチュエータ部13と、制御軸12の変位量に応じてバルブ開閉特性(例えば最大リフト量や作用角等)を変更するバルブ開閉特性変更機構14が設けられている。アクチュエータ部13には、モータ15で回転駆動されるカム17によって制御軸12を変位させるカム機構18と、カム17の回転角度を検出する回転角センサ19が設けられている。カム機構18は、モータ15の回転軸に減速機16を介してカム17が連結され、このカム17の外周面に制御軸12の先端が当接する(カム17の外周面で制御軸12の先端を押圧する)ように制御軸12が配置されている。カム機構18は、カム17の回転運動を制御軸12の往復直線運動に変換する役割を果たす。
図7に示す誤差検出ルーチンは、ECU21の電源オン期間中に所定周期で繰り返し実行される。本ルーチンが起動されると、まず、ステップ101で、モータ15が一定の駆動力で回転中であるか否かを判定し、このステップ101で、モータ15が一定の駆動力で回転中ではないと判定された場合には、ステップ102以降の処理を実行することなく、本ルーチンを終了する。
その他、本発明は、カム機構の構成(カムや制御部材の形状、段差部の数や位置等)を適宜変更しても良い等、要旨を逸脱しない範囲内で種々変更して実施できる。
Claims (7)
- モータ(15)で回転駆動されるカム(17)によって制御部材(12)を変位させるカム機構(18)と、前記カム(17)の回転角度又はこれと相関関係を有する情報(以下これらを「回転角度情報」と総称する)を検出するセンサ(19)と、前記センサ(19)の出力信号に基づいて前記制御部材(12)の変位量又はこれと相関関係を有する情報(以下これらを「変位量情報」と総称する)を算出する変位量情報算出手段(21)とを備えたカム機構の制御装置において、
前記カム(17)に設けられて該カム(17)の回転時に前記制御部材(12)の変位量の傾きが他の部分と異なるように形成された段差部(20)と、
前記センサ(19)の出力信号に基づいて前記カム(17)の角速度又はこれと相関関係を有する情報(以下これらを「角速度情報」と総称する)を算出する角速度情報算出手段(21)と、
前記センサ(19)の出力信号に基づいて算出された変位量情報の算出値と前記角速度情報とに基づいて前記変位量情報の算出値の誤差を検出する誤差検出手段(21)と
を備えていることを特徴とするカム機構の制御装置。 - 前記角速度情報に基づいて前記カム(17)の回転位置が前記段差部(20)で前記制御部材(12)と当接する段差位置であるか否かを判定する段差判定手段(21)を備え、
前記誤差検出手段(21)は、前記カム(17)の回転位置が前記段差位置であると判定されたときに、予め記憶した前記段差位置における実際の変位量情報と前記センサ(19)の出力信号に基づいて算出された変位量情報の算出値との差を前記変位量情報の算出値の誤差として算出することを特徴とする請求項1に記載のカム機構の制御装置。 - 前記段差判定手段(21)は、前記角速度情報が所定値を越えたとき又は所定範囲外となったときに前記カム(17)の回転位置が前記段差位置であると判定することを特徴とする請求項2に記載のカム機構の制御装置。
- 前記変位量情報の算出値の誤差を所定の異常判定値と比較して異常の有無を判定する異常診断手段(21)を備えていることを特徴とする請求項1乃至3のいずれかに記載のカム機構の制御装置。
- 前記変位量情報の算出値の誤差に基づいて該変位量情報の算出値を補正する算出値補正手段(21)を備えていることを特徴とする請求項1乃至4のいずれかに記載のカム機構の制御装置。
- 前記変位量情報の算出値を該変位量情報の目標値に一致させるように前記モータ(15)を制御する制御手段(21)と、
前記変位量情報の算出値の誤差に基づいて前記目標値を補正する目標値補正手段(21)とを備えていることを特徴とする請求項1乃至4のいずれかに記載のカム機構の制御装置。 - 前記変位量情報は、前記カム(17)の回転角度、前記制御部材(12)の変位量、前記制御部材(12)の変位に伴って変化する物理量のうちのいずれか一つであることを特徴とする請求項1乃至6のいずれかに記載のカム機構の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276597A JP5935138B2 (ja) | 2012-12-19 | 2012-12-19 | カム機構の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276597A JP5935138B2 (ja) | 2012-12-19 | 2012-12-19 | カム機構の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014119087A true JP2014119087A (ja) | 2014-06-30 |
| JP5935138B2 JP5935138B2 (ja) | 2016-06-15 |
Family
ID=51174092
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012276597A Expired - Fee Related JP5935138B2 (ja) | 2012-12-19 | 2012-12-19 | カム機構の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5935138B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016088330A1 (ja) * | 2014-12-03 | 2016-06-09 | 株式会社デンソー | 制御装置 |
| WO2016092753A1 (ja) * | 2014-12-10 | 2016-06-16 | 株式会社デンソー | 制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10159930A (ja) * | 1996-11-27 | 1998-06-16 | Fuji Mach Mfg Co Ltd | 回路部品搬送装置 |
| JP2002332876A (ja) * | 2001-05-09 | 2002-11-22 | Unisia Jecs Corp | 内燃機関の可変動弁装置 |
| JP2006144593A (ja) * | 2004-11-17 | 2006-06-08 | Toyota Motor Corp | 内燃機関のバルブ開閉特性制御装置 |
| JP2007262981A (ja) * | 2006-03-28 | 2007-10-11 | Mitsubishi Motors Corp | 内燃機関の可変動弁装置 |
| JP2008202531A (ja) * | 2007-02-21 | 2008-09-04 | Toyota Motor Corp | 内燃機関のバルブ特性制御装置 |
-
2012
- 2012-12-19 JP JP2012276597A patent/JP5935138B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10159930A (ja) * | 1996-11-27 | 1998-06-16 | Fuji Mach Mfg Co Ltd | 回路部品搬送装置 |
| JP2002332876A (ja) * | 2001-05-09 | 2002-11-22 | Unisia Jecs Corp | 内燃機関の可変動弁装置 |
| JP2006144593A (ja) * | 2004-11-17 | 2006-06-08 | Toyota Motor Corp | 内燃機関のバルブ開閉特性制御装置 |
| JP2007262981A (ja) * | 2006-03-28 | 2007-10-11 | Mitsubishi Motors Corp | 内燃機関の可変動弁装置 |
| JP2008202531A (ja) * | 2007-02-21 | 2008-09-04 | Toyota Motor Corp | 内燃機関のバルブ特性制御装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016088330A1 (ja) * | 2014-12-03 | 2016-06-09 | 株式会社デンソー | 制御装置 |
| JP2016108976A (ja) * | 2014-12-03 | 2016-06-20 | 株式会社デンソー | 制御装置 |
| DE112015005496B4 (de) | 2014-12-03 | 2022-06-15 | Denso Corporation | Steuervorrichtung |
| WO2016092753A1 (ja) * | 2014-12-10 | 2016-06-16 | 株式会社デンソー | 制御装置 |
| JP2016109093A (ja) * | 2014-12-10 | 2016-06-20 | 株式会社デンソー | 制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5935138B2 (ja) | 2016-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7133764B2 (en) | Method for determining the angle-of-rotation position of a shaft | |
| US9133776B2 (en) | Control apparatus and control method for internal-combustion engine | |
| US10408138B2 (en) | Method and functional monitoring apparatus for functional monitoring of an apparatus for variable setting of a cylinder compression in a reciprocating-piston internal combustion engine | |
| CN109667681B (zh) | 防止轴承卡死的方法以及利用该方法的车辆 | |
| CN107076039B (zh) | 用于识别混合动力车辆的内燃机的燃烧过程的方法和控制装置 | |
| JP4074463B2 (ja) | 内燃機関の可変動弁装置における制御軸回転角位置センサ出力基準位置学習装置 | |
| JP2009281332A (ja) | バルブ特性変更機構の異常判定装置 | |
| JP5935138B2 (ja) | カム機構の制御装置 | |
| JP2009221856A (ja) | エンジンの失火診断装置 | |
| JP2011007119A (ja) | スロットル異常診断装置 | |
| JP4395000B2 (ja) | エンジン制御装置 | |
| JP5961403B2 (ja) | 電子制御スロットル装置 | |
| KR101870486B1 (ko) | 엔진 시스템을 작동하기 위한 제어 장치를 모니터링하기 위한 방법 및 장치 | |
| US8205605B2 (en) | Method for operating an internal combustion engine | |
| JP2010150953A (ja) | 内燃機関の失火診断装置 | |
| JP4788964B2 (ja) | 内燃機関の制御装置 | |
| JP2009097347A (ja) | 内燃機関の制御装置 | |
| US20230279822A1 (en) | Throttle control system and throttle control method | |
| JP5678908B2 (ja) | スロットル制御システム、スロットルバルブ制御装置、スロットル装置、およびスロットルバルブ制御方法 | |
| JP2009197767A (ja) | 可変作用角機構の異常判定装置 | |
| JP2008286055A (ja) | アクチュエータの制御装置 | |
| JP6038743B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| US20230383701A1 (en) | Throttle control system, throttle control method, and memory medium | |
| KR102474615B1 (ko) | 간접진단방식 cvvd 위치학습 보정방법 및 cvvd 시스템 | |
| JP6714526B2 (ja) | 失火判定手段及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150907 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151016 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151113 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160307 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160309 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160314 |
|
| AA92 | Notification of invalidation |
Free format text: JAPANESE INTERMEDIATE CODE: A971092 Effective date: 20160322 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160418 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5935138 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |