JP2013186089A - 表面形状の測定方法及び測定装置 - Google Patents
表面形状の測定方法及び測定装置 Download PDFInfo
- Publication number
- JP2013186089A JP2013186089A JP2012053684A JP2012053684A JP2013186089A JP 2013186089 A JP2013186089 A JP 2013186089A JP 2012053684 A JP2012053684 A JP 2012053684A JP 2012053684 A JP2012053684 A JP 2012053684A JP 2013186089 A JP2013186089 A JP 2013186089A
- Authority
- JP
- Japan
- Prior art keywords
- measured
- information
- measurement
- light
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 112
- 238000000691 measurement method Methods 0.000 title abstract description 7
- 238000003384 imaging method Methods 0.000 claims abstract description 25
- 230000003287 optical effect Effects 0.000 claims abstract description 18
- 230000001427 coherent effect Effects 0.000 claims abstract description 11
- 230000001678 irradiating effect Effects 0.000 claims abstract description 4
- 238000012545 processing Methods 0.000 claims description 58
- 238000000034 method Methods 0.000 claims description 34
- 238000013461 design Methods 0.000 claims description 5
- 238000012360 testing method Methods 0.000 description 8
- 238000005305 interferometry Methods 0.000 description 7
- 238000004458 analytical method Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/2441—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02001—Interferometers characterised by controlling or generating intrinsic radiation properties
- G01B9/02002—Interferometers characterised by controlling or generating intrinsic radiation properties using two or more frequencies
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02001—Interferometers characterised by controlling or generating intrinsic radiation properties
- G01B9/02002—Interferometers characterised by controlling or generating intrinsic radiation properties using two or more frequencies
- G01B9/02004—Interferometers characterised by controlling or generating intrinsic radiation properties using two or more frequencies using frequency scans
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02001—Interferometers characterised by controlling or generating intrinsic radiation properties
- G01B9/02007—Two or more frequencies or sources used for interferometric measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02055—Reduction or prevention of errors; Testing; Calibration
- G01B9/0207—Error reduction by correction of the measurement signal based on independently determined error sources, e.g. using a reference interferometer
- G01B9/02071—Error reduction by correction of the measurement signal based on independently determined error sources, e.g. using a reference interferometer by measuring path difference independently from interferometer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02083—Interferometers characterised by particular signal processing and presentation
- G01B9/02088—Matching signals with a database
Abstract
【課題】被測定物の表面形状を迅速に測定可能とする、測定方法及び測定装置を提供する。
【解決手段】表面形状の測定方法では、コヒーレントな光をその周波数を変化させながら被測定物と参照面とに照射して前記被測定物で反射された計測光と前記参照面で反射された参照光との干渉縞を撮像して前記被測定物の表面形状を測定する。前記測定方法は、前記計測光の光軸と直交する基準面の上に投影された前記被測定物の像の輪郭の第1情報と前記表面形状の既知の第2情報との少なくともいずれかに基づいて、前記光の周波数を変化させる速度を設定する設定工程と、前記被測定物及び前記参照面に照射する前記光の周波数を前記設定工程で設定された速度で変化させながら前記干渉縞の複数の画像を撮像素子により取得する取得工程と、前記取得工程で取得された前記複数の画像に基づいて前記表面形状を求める工程と、を含む。
【選択図】図2
【解決手段】表面形状の測定方法では、コヒーレントな光をその周波数を変化させながら被測定物と参照面とに照射して前記被測定物で反射された計測光と前記参照面で反射された参照光との干渉縞を撮像して前記被測定物の表面形状を測定する。前記測定方法は、前記計測光の光軸と直交する基準面の上に投影された前記被測定物の像の輪郭の第1情報と前記表面形状の既知の第2情報との少なくともいずれかに基づいて、前記光の周波数を変化させる速度を設定する設定工程と、前記被測定物及び前記参照面に照射する前記光の周波数を前記設定工程で設定された速度で変化させながら前記干渉縞の複数の画像を撮像素子により取得する取得工程と、前記取得工程で取得された前記複数の画像に基づいて前記表面形状を求める工程と、を含む。
【選択図】図2
Description
本発明は、表面形状の測定方法及び測定装置に関する。
被測定物の画像情報から被測定物の全面に亙る表面形状(高さ)の情報を一括して測定するために、波長走査干渉法を利用する方法が存在する。しかしこの波長走査干渉法は、干渉信号を取得するために撮像素子を用いて多数の画像を取得する必要があり、表面形状を迅速に測定することが困難であった。
APPLIED OPTICS,Vol. 33, No. 34
非特許文献1記載の方法では、被測定物に波長(又は周波数)を走査しながらコヒーレントな光を照射し、被測定物で反射した光と参照面で反射した光との干渉光を、撮像素子を用いて複数の時刻で多数枚撮像する。そして、非特許文献1記載の方法では、撮像素子の画素ごとに得られた干渉信号から被測定物の表面形状(高さ)の情報を一括して測定する。非特許文献1記載の方法は、撮像素子にて百数十枚という多くの画像を取得する必要があり、被測定物の表面形状を迅速に測定することが困難である。
そこで、本発明は、例えば表面形状の迅速な測定に資する、波長走査干渉法で使用する光の周波数の変化速度の新たな設定手法を提供することを目的とする。
本発明は、コヒーレントな光をその周波数を変化させながら被測定物と参照面とに照射して前記被測定物で反射された計測光と前記参照面で反射された参照光との干渉縞を撮像して前記被測定物の表面形状を測定する方法であって、前記計測光の光軸と直交する基準面の上に投影された前記被測定物の像の輪郭の第1情報と前記表面形状の既知の第2情報との少なくともいずれかに基づいて、前記光の周波数を変化させる速度を設定する設定工程と、前記被測定物及び前記参照面に照射する前記光の周波数を前記設定工程で設定された速度で変化させながら前記干渉縞の複数の画像を撮像素子により取得する取得工程と、前記取得工程で取得された前記複数の画像に基づいて前記表面形状を求める工程と、を含むことを特徴とする。
本発明によれば、例えば表面形状の迅速な測定に資する、波長走査干渉法で使用する光の周波数の変化速度の新たな設定手法を提供することができる。
[実施形態1]
波長走査干渉法を用いて被測定物の表面形状の既知の情報(第2情報)から被測定物の表面形状を迅速に測定する実施形態1の装置(測定装置)の構成を図1に示す。測定装置は、コヒーレントな光をその周波数(及び波長)を変化させながら射出する波長可変レーザー1を光源とする。処理部8は、波長可変レーザー1から射出されるコヒーレントな光の周波数をある時間範囲で変化させる。波長可変レーザー1から射出された光は、拡大レンズ2aで光束を拡大し、コリメートレンズ2bにて平行光にされ、ビームスプリッタ3により参照面4aに向かう光と被測定物5とに向かう光とに分割される。
波長走査干渉法を用いて被測定物の表面形状の既知の情報(第2情報)から被測定物の表面形状を迅速に測定する実施形態1の装置(測定装置)の構成を図1に示す。測定装置は、コヒーレントな光をその周波数(及び波長)を変化させながら射出する波長可変レーザー1を光源とする。処理部8は、波長可変レーザー1から射出されるコヒーレントな光の周波数をある時間範囲で変化させる。波長可変レーザー1から射出された光は、拡大レンズ2aで光束を拡大し、コリメートレンズ2bにて平行光にされ、ビームスプリッタ3により参照面4aに向かう光と被測定物5とに向かう光とに分割される。
参照面4aに照射された光は参照面4aで反射され参照光としてビームスプリッタ3に戻る。一方、被測定物5に向かった光は、参照面4aと共役な位置4bから距離Dだけ離した場所に設けられた台6に置かれた被測定物5に照射される。被測定物5に照射された光は、被測定物5で反射され、計測光としてビームスプリッタ3に戻り、参照面4aから反射された参照光と干渉を起こし、撮像素子7上に干渉縞を形成する。処理部8は、この干渉縞を、波長可変レーザー1の周波数を変化(走査)させながら撮像素子7によって複数の画像を取得する。処理部8は、撮像された複数の画像から各画素における干渉縞に対して周波数解析を行い、光軸方向に投影された被測定物5の面上の各点における表面形状(Z寸法)を測定する。
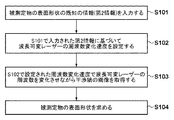
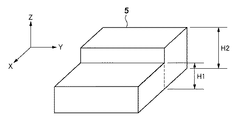
図2を用いて実施形態1における表面形状を測定する方法を説明する。S101で、処理部8は、被測定物5の表面形状の既知の情報(第2情報)を取得する。第2情報の取得は、例えば表面形状の既知の情報が処理部8に入力されることでなされる。第2情報は、被測定物5の表面の各位置におけるZ寸法のおおよその値のデータであり、図3においてH1やH2のように台6に接する面からのZ寸法の分布を表すデータである。被測定物5の設計情報や原器による被測定物5の測定結果を示す情報が第2情報に該当する。
第2情報として設計情報を用いる場合には、設計情報がキーボード等の入力機器から処理部8に直接入力される。第2情報として原器による測定結果を用いる場合には、原器を用いて被測定物5の測定を実際に行い、その測定結果が処理部8のデータベースに登録される。また、様々な被測定物5の設計情報であるCADデータや様々な被測定物5の表面形状の測定結果を予め登録しておき、登録された被測定物5の中の1つを指定することにより第2情報を入力してもよい。
S102で、処理部8は、S101で入力された第2情報に基づいて波長可変レーザー1の撮像毎の周波数を変化させる速度を設定する(設定工程)。波長走査干渉法では、被測定物5の各点における干渉信号の最大周波数νmaxは、参照光と計測光との光路長差の最大値OPDmaxと周波数の変化速度Δfとを用いて以下の式1で表される。ここでCは光速である。
νmax=(4・π・Δf・OPDmax)/C・・・(1)
最も速く撮像が行える条件はサンプリング定理より以下の式2を満たす場合である。ここでFRは撮像素子7のフレームレートである。
νmax=FR/2・・・(2)
いかなる被測定物5においても、干渉信号の最大周波数νmaxが撮像素子7のフレームレートFRの1/2であるナイキスト周波数になればよい。しかし、光路長差の最大値OPDmaxは被測定物5によって異なる。したがって、周波数の変化速度Δfが一定の場合、最大周波数νmaxが撮像素子7のフレームレートFRに対するナイキスト周波数FR/2になるとは限らない。
νmax=(4・π・Δf・OPDmax)/C・・・(1)
最も速く撮像が行える条件はサンプリング定理より以下の式2を満たす場合である。ここでFRは撮像素子7のフレームレートである。
νmax=FR/2・・・(2)
いかなる被測定物5においても、干渉信号の最大周波数νmaxが撮像素子7のフレームレートFRの1/2であるナイキスト周波数になればよい。しかし、光路長差の最大値OPDmaxは被測定物5によって異なる。したがって、周波数の変化速度Δfが一定の場合、最大周波数νmaxが撮像素子7のフレームレートFRに対するナイキスト周波数FR/2になるとは限らない。
そこで、S102で、処理部8は、S101で入力された被測定物5の既知の表面形状の第2情報から参照光と計測光との光路長差の最大値OPDmaxを設定し、設定されたOPDmaxを基に周波数の変化速度Δfを設定する。本実施形態では被測定物5の台6に対する搭載面を参照面4aと共役な位置4bから距離Dだけ離した場所に設けている。そのため、被測定物5のZ寸法の概略値データHとすると、光路長差の最大値OPDmaxは以下の式3で表すことができる。ここでMAXは被測定物のZ寸法の概略値データHの中から最大値を求める関数である。
OPDmax=MAX(H)+D・・・(3)
そこで最も高速に撮像が行える条件式2に干渉信号の最大周波数νmaxを表す式1を代入し、Δfについて整理すると以下の式4が得られる。処理部8は、以下の式4を満たすように波長可変レーザー1の周波数の変化速度Δfを設定する。
Δf≦(FR・C)/(8・π・OPDmax)・・・(4)
ここで被測定物5のZ寸法の概略値データの最大値をHmaxとした場合における最大のΔfは、以下の式5で表わされる。ここでαはオフセットである。実際の測定においては被測定物5の製造誤差や測定時のノイズ等によるエリアシングを防ぐ為に干渉信号周波数がナイキスト周波数から1割程度低い値になる事が望ましい。この為αの値を0.9程度に設定する。
Δf=(α・FR・C)/{8・π・(Hmax+D)}・・・(5)
S103で、処理部8は、S102で設定された波長可変レーザー1の周波数の変化速度Δfに基づき波長可変レーザー1の波長を変化させながら撮像素子7によりZ寸法を測定するための画像を取得する(取得工程)。式5で表わされる周波数の変化速度Δfで被測定物5を測定した場合の測定時間tは波長可変レーザー1の周波数走査幅をΔFとすると以下の式6で表すことができる。
t=ΔF/Δf={8・π・(Hmax+D)・ΔF}/(α・FR・C)・・・(6)
式6より被測定物5のZ寸法(Hmax)が変化した場合に測定時間tが変化することがわかる。被測定物のZ寸法が低いほど高速に測定が行える。被測定物5のZ寸法に応じて設定された周波数の変化速度Δfとすると、被測定物5のZ寸法に対応させずに固定されたΔfとする場合と比較して測定時間を短縮することができる。例えば、参照面4aと共役な位置4bからの距離Dを10mm、Z寸法の測定可能範囲が50mm、αが0.9の条件で、Z寸法の概略値の最大値が10mmの被測定物のZ寸法を測定するとする。この場合、被測定物のZ寸法に応じて周波数の変化速度Δfを設定するとΔfを固定した場合と比較して測定時間を約1/3に短縮することができる。
OPDmax=MAX(H)+D・・・(3)
そこで最も高速に撮像が行える条件式2に干渉信号の最大周波数νmaxを表す式1を代入し、Δfについて整理すると以下の式4が得られる。処理部8は、以下の式4を満たすように波長可変レーザー1の周波数の変化速度Δfを設定する。
Δf≦(FR・C)/(8・π・OPDmax)・・・(4)
ここで被測定物5のZ寸法の概略値データの最大値をHmaxとした場合における最大のΔfは、以下の式5で表わされる。ここでαはオフセットである。実際の測定においては被測定物5の製造誤差や測定時のノイズ等によるエリアシングを防ぐ為に干渉信号周波数がナイキスト周波数から1割程度低い値になる事が望ましい。この為αの値を0.9程度に設定する。
Δf=(α・FR・C)/{8・π・(Hmax+D)}・・・(5)
S103で、処理部8は、S102で設定された波長可変レーザー1の周波数の変化速度Δfに基づき波長可変レーザー1の波長を変化させながら撮像素子7によりZ寸法を測定するための画像を取得する(取得工程)。式5で表わされる周波数の変化速度Δfで被測定物5を測定した場合の測定時間tは波長可変レーザー1の周波数走査幅をΔFとすると以下の式6で表すことができる。
t=ΔF/Δf={8・π・(Hmax+D)・ΔF}/(α・FR・C)・・・(6)
式6より被測定物5のZ寸法(Hmax)が変化した場合に測定時間tが変化することがわかる。被測定物のZ寸法が低いほど高速に測定が行える。被測定物5のZ寸法に応じて設定された周波数の変化速度Δfとすると、被測定物5のZ寸法に対応させずに固定されたΔfとする場合と比較して測定時間を短縮することができる。例えば、参照面4aと共役な位置4bからの距離Dを10mm、Z寸法の測定可能範囲が50mm、αが0.9の条件で、Z寸法の概略値の最大値が10mmの被測定物のZ寸法を測定するとする。この場合、被測定物のZ寸法に応じて周波数の変化速度Δfを設定するとΔfを固定した場合と比較して測定時間を約1/3に短縮することができる。
S104で、処理部8は、S103で取得した複数の画像情報から撮像素子7の各画素においてフーリエ変換等の処理を行って周波数解析を行い、得られた干渉信号の周波数νm,nを設定する。ここでmは撮像素子の列方向の番号、nは撮像素子の列方向の番号を表す。
本実施形態では、被測定物5のZ寸法と、参照面4aと共役な位置4bからの距離Dとの合計が光路長差に相当する。そこで、処理部8は、設定された干渉信号の周波数νm,nから以下の式7により被測定物5のZ寸法Hm,nを求める。
Hm,n={(νm,n・C)/(4・π・Δf)}−D・・・(7)
S104は、被測定物5の表面形状を求める工程である。実施形態1の測定装置は、被測定物5のZ寸法に応じて設定された周波数の変化速度Δfで波長可変レーザー1の周波数を変化させながら測定を行うことで、被測定物5の各点におけるZ寸法を迅速に一括して測定することができる。同じ種類の被測定物5のZ寸法を続けて測定する場合、2つ目以降の被測定物5に対してはS101を行う必要はなくS102〜S104のみを行えばよい。
Hm,n={(νm,n・C)/(4・π・Δf)}−D・・・(7)
S104は、被測定物5の表面形状を求める工程である。実施形態1の測定装置は、被測定物5のZ寸法に応じて設定された周波数の変化速度Δfで波長可変レーザー1の周波数を変化させながら測定を行うことで、被測定物5の各点におけるZ寸法を迅速に一括して測定することができる。同じ種類の被測定物5のZ寸法を続けて測定する場合、2つ目以降の被測定物5に対してはS101を行う必要はなくS102〜S104のみを行えばよい。
[実施形態2]
実施形態2の測定装置は、光源の波長を多波長として波長走査干渉法を実行する。その結果、測定精度が同じであるならば、実施形態2では、実施形態1の測定方法と比較して光源の周波数の走査幅ΔFを少なくすることができるので、式6から明らかなように、実施形態1より測定時間を更に短縮することができる。
実施形態2の測定装置は、光源の波長を多波長として波長走査干渉法を実行する。その結果、測定精度が同じであるならば、実施形態2では、実施形態1の測定方法と比較して光源の周波数の走査幅ΔFを少なくすることができるので、式6から明らかなように、実施形態1より測定時間を更に短縮することができる。
図4は、実施形態2の被測定物5の3次元測定装置の構成を示す概略図である。測定装置は、周波数を変化させながらコヒーレントな光を射出する波長可変レーザー1を一方の光源とする。処理部8は、波長可変レーザー1から射出される光束の周波数(波長)をある時間範囲で変化させる。波長可変レーザー1から射出される周波数f1の光はビームスプリッタ3aにより分割される。分割された光の一方は、周波数を任意の量だけシフトさせる周波数シフタ11aに入射し、任意の周波数シフト量df1だけ周波数がシフトした光に変換される。
周波数がシフトされた光は、反射ミラー10aにより進行方向を変えられた後、ビームスプリッタ3aで分割されて反射ミラー10bにより進行方向を変えられた光とビームスプリッタ3bで合波される。この合波された光束を光束1とする。周波数シフト量df1は、光束1のビート信号の周波数に相当し、干渉信号を正しく取得する為に撮像素子7のFRの1/2以下である必要がある。
測定装置は、また周波数が固定されたコヒーレントな光を射出する波長固定レーザー9をもう一方の光源とする。波長固定レーザー9から射出される周波数f2の光は波長可変レーザー1と同様に、ビームスプリッタ10cにより光を分割される。分割された光の一方は周波数シフタ11bにより任意の周波数df2だけ周波数がシフトした光に変換され、反射ミラー10dにより進行方向を変えられる。
ビームスプリッタ10cにより分割された光の他方は、波長固定レーザー9が発する周波数のまま進行方向を変えられ、反射ミラー10eにより進行方向を変えられる。周波数df2だけ周波数がシフトした光と波長固定レーザー9が発する周波数のままの光とは、ビームスプリッタ3dにより合波される。この光束を光束2とする。周波数シフト量df2は、光束2のビート信号の周波数に相当し、干渉信号を正しく取得する為に撮像素子7のFRの1/2以下である必要がある。
光束2と反射ミラー4cにより進行方向を変えられた光束1とはビームスプリッタ3eにより合波され、拡大レンズ2aにより光束を拡大された後、コリメートレンズ2bにより平行光束にされる。平行光束は、ビームスプリッタ3fにより参照面4aに向かう光束と、台6に載せられた被測定物5に向かう光束とに分割される。
参照面4aに入射した光束は参照面4aにて反射され、参照光としてビームスプリッタ3fに戻る。一方、被測定物5に向かった光束は、参照面4aと共役な位置4bから距離Dだけ離れた場所に設けられた台6に載せられた被測定物5に照射される。被測定物5に照射された光束は、被測定物5で反射され、計測光としてビームスプリッタ3fに戻る。計測光は、参照面4aから反射された参照光と干渉を起こし、撮像素子7上に干渉縞を形成する。このとき、撮像素子7上では、周波数f1の光と周波数(f1+df1)の光とが合波された光束1によるビート干渉信号1と周波数f2の光と周波数(f2+df2)の光とが合波されたビート干渉信号2を重ね合わせた干渉縞が形成される。
測定装置は、この状態で図5に示す時刻t0から干渉縞の撮像を行う。測定装置は、時刻t1〜t2の期間、波長可変レーザー1の周波数をf1〜f1’まで変化させつつ、撮像素子7にて干渉縞を複数枚撮像する。測定装置は、時刻t2〜t3の期間、波長可変レーザー1の周波数をf1’に維持しつつ、撮像素子7にて干渉縞を複数枚撮像する。
まず、処理部8は、時刻t0〜t1の間に撮像された複数枚の画像からビート干渉信号1を取得する。処理部8は、ビート干渉信号1に対して4バケット法や13バケット法や離散フーリエ変換等の計算を行って、周波数f1のビート干渉信号1の各画素における位相φ1m,nを算出する。ここで、mは撮像素子における画素の行方向の番号、nは列方向の番号を表す。次に、処理部8は、時刻t1〜t2の間に撮像された複数枚の画像から各画素において干渉縞の明点、暗点の数をカウントする等の方法により周波数走査中のビート干渉信号の変化数を求め、干渉次数M1m,nを設定する。
次に、処理部8は、時刻t2〜t3の間に撮像された複数枚の画像から各画素のビート干渉信号1’を取得し、離散フーリエ変換等の計算を行って周波数f1’ のビート干渉信号1’の位相φ1’ m,nを算出する。次に、処理部8は、各時点で算出された位相φ1m,n、φ1’m,n、干渉次数M1m,nから合成波長Λ11’を用いたZ寸法H1m,nを以下の式8により算出する。Λ11’は光周波数f1とf1’の合成波長であり以下の式9で表される。Cは光速である。
H1m,n=(Λ11’/2){M1m,n+(φ1’m,n−φ1m,n)/2π}・・・(8)
Λ11’=C/|f1−f1’|・・・(9)
次に、処理部8は、時刻t0〜t3の間に撮像された波長固定レーザー9による複数枚の画像からビート干渉信号2を取得する。処理部8は、ビート干渉信号2に対して4バケット法や13バケット法や離散フーリエ変換等の計算を行って、周波数f2のビート干渉信号2の各画素における位相φ2m,nを算出する。処理部8は、得られたφ2m,nと先ほど算出したφ1’m,nから合成波長Λ1’2を用いたZ寸法H2m,nを以下の式10により算出する。Λ1’2は光周波数f1’とf2の合成波長であり以下の式11で表される。
H2m,n=(Λ1’2/2){M2m,n+(φ1’m,n−φ2m,n)/2π}・・・(10)
Λ1’2=C/|f’1−f2|・・・(11)
M2m,nは合成波長Λ1’2を用いた場合の干渉次数であり以下の式12により算出することが出来る。
M2m,n=round{(2H1m,n/Λ11’)−(φ1’m,n−φ2m,n)/2π}・・・(12)
図5の例では、|f1−f1’|<|f1’−f2|であるから、合成波長Λ1’2は合成波長Λ11’よりも短い。したがって、式10で算出したZ寸法H2m,nは式8で算出したZ寸法H1m,nよりも高精度である。
H1m,n=(Λ11’/2){M1m,n+(φ1’m,n−φ1m,n)/2π}・・・(8)
Λ11’=C/|f1−f1’|・・・(9)
次に、処理部8は、時刻t0〜t3の間に撮像された波長固定レーザー9による複数枚の画像からビート干渉信号2を取得する。処理部8は、ビート干渉信号2に対して4バケット法や13バケット法や離散フーリエ変換等の計算を行って、周波数f2のビート干渉信号2の各画素における位相φ2m,nを算出する。処理部8は、得られたφ2m,nと先ほど算出したφ1’m,nから合成波長Λ1’2を用いたZ寸法H2m,nを以下の式10により算出する。Λ1’2は光周波数f1’とf2の合成波長であり以下の式11で表される。
H2m,n=(Λ1’2/2){M2m,n+(φ1’m,n−φ2m,n)/2π}・・・(10)
Λ1’2=C/|f’1−f2|・・・(11)
M2m,nは合成波長Λ1’2を用いた場合の干渉次数であり以下の式12により算出することが出来る。
M2m,n=round{(2H1m,n/Λ11’)−(φ1’m,n−φ2m,n)/2π}・・・(12)
図5の例では、|f1−f1’|<|f1’−f2|であるから、合成波長Λ1’2は合成波長Λ11’よりも短い。したがって、式10で算出したZ寸法H2m,nは式8で算出したZ寸法H1m,nよりも高精度である。
また、処理部8は、波長固定レーザー9の光周波数f2と式10で算出した干渉次数M2m,nから固定波長レーザー9の波長(C/f2)を用いたZ寸法H3m,nを以下の式13により算出する。ここでM3m,nは干渉次数であり、以下の式14により算出することが出来る。
H3m,n=(C/2f2){M3m,n+(φ2m,n/2π)}・・・(13)
M3m,n=round{(2H2m,nC/f2)−(φ2m,n/2π)}・・・(14)
本実施形態では、固定波長レーザー9の波長(C/f2)は合成波長Λ12’ よりも短い。したがって、式13で算出したZ寸法H3m,nは式10で算出したZ寸法H2m,nよりも高精度である。処理部8は、以上の方法により被測定物5の表面の各点におけるZ寸法を測定する。実施形態2における測定方法のフローを図2に基づいて説明する。
H3m,n=(C/2f2){M3m,n+(φ2m,n/2π)}・・・(13)
M3m,n=round{(2H2m,nC/f2)−(φ2m,n/2π)}・・・(14)
本実施形態では、固定波長レーザー9の波長(C/f2)は合成波長Λ12’ よりも短い。したがって、式13で算出したZ寸法H3m,nは式10で算出したZ寸法H2m,nよりも高精度である。処理部8は、以上の方法により被測定物5の表面の各点におけるZ寸法を測定する。実施形態2における測定方法のフローを図2に基づいて説明する。
S101〜S103までは実施形態1と同様である。S104で、処理部8は、S103で取得した複数の画像情報から撮像素子7の各画素において、周波数走査中のビート干渉信号の変化数から干渉次数を求め、合成波長を用いて位相接続を行い、被測定物5のZ寸法の解析を行う。
実施形態21の測定装置もは、被測定物5のZ寸法に応じて設定された周波数の変化速度Δfで波長可変レーザー1の周波数を変化させながら測定を行うことで、被測定物5の各点におけるZ寸法を迅速に一括して測定することができる。同じ種類の被測定物5のZ寸法を続けて測定する場合、2つ目以降の被測定物5に対してはS101を行う必要はなくS102〜S104のみを行えばよい。
[実施形態3]
実施形態3では、インコヒーレントな光を発生する光源が追加され、測定装置は、インコヒーレントな光による画像から被測定物5のZ寸法の概略値データや被測定物5の位置、方位等を設定する。実施形態3の測定装置は、それら設定されたデータから撮像素子7のフレームレートを変更して被測定物5のZ寸法の測定をより高速に行うと共にインコヒーレントな光による画像からXY平面に投影された2次元形状の寸法の測定も行う。
実施形態3では、インコヒーレントな光を発生する光源が追加され、測定装置は、インコヒーレントな光による画像から被測定物5のZ寸法の概略値データや被測定物5の位置、方位等を設定する。実施形態3の測定装置は、それら設定されたデータから撮像素子7のフレームレートを変更して被測定物5のZ寸法の測定をより高速に行うと共にインコヒーレントな光による画像からXY平面に投影された2次元形状の寸法の測定も行う。
図6は、実施形態3の3次元測定装置の構成を示す。測定装置は、光源としてインコヒーレントな光を発生する光源9をさらに含む。光源9から射出された光は、拡大レンズ2cにより光束を拡大され、コリメートレンズ2dにて平行にされる。平行とされたインコヒーレントな光は、ビームスプリッタ3aにて進行方向を変えられた後、ビームスプリッタ3bを通過し、被測定物5に照射される。被測定物5に照射されたインコヒーレントな光は、被測定物5で反射された後、ビームスプリッタ3bにて進行方向を変えられ、撮像素子7に入射する。撮像素子7でインコヒーレントな光による被測定物5の像を撮像し、処理部8は、得られた画像の光強度からエッジ検出等の処理を行い被測定物5のXY平面における投影寸法を測定する。Z寸法の測定については実施形態1と同様である。
実施形態3における測定方法のフローを図7に示す。S201で、複数の測定対象物のそれぞれについての情報が処理部8に登録される(登録工程)。処理部8に登録される測定対象物の情報を以下に示す。
・計測光の光軸と直交する基準面(XY平面)の上に投影された測定対象物の像の輪郭の情報(第1情報)。この情報は、S203で被測定物5の種類を設定する為に用いられる。
・表面形状の既知の情報(第2情報)。この情報は、S206で波長可変レーザー1の周波数の変化速度を設定する為に用いられる。
・表面形状の測定対象領域を示す情報。この情報は、S205で撮像素子7の撮像条件を設定する際に用いられる。
・表面形状の測定位置における単位面積当たりのZ寸法を測定する点数を示す測定密度の情報。この情報は、S205で撮像素子7の撮像条件を設定する際に用いられる。
・XY平面における2次元形状の寸法の測定箇所を示す情報。この情報は、S209で2次元形状の寸法の測定を行う際に測定箇所を設定する為に用いられる。
・計測光の光軸と直交する基準面(XY平面)の上に投影された測定対象物の像の輪郭の情報(第1情報)。この情報は、S203で被測定物5の種類を設定する為に用いられる。
・表面形状の既知の情報(第2情報)。この情報は、S206で波長可変レーザー1の周波数の変化速度を設定する為に用いられる。
・表面形状の測定対象領域を示す情報。この情報は、S205で撮像素子7の撮像条件を設定する際に用いられる。
・表面形状の測定位置における単位面積当たりのZ寸法を測定する点数を示す測定密度の情報。この情報は、S205で撮像素子7の撮像条件を設定する際に用いられる。
・XY平面における2次元形状の寸法の測定箇所を示す情報。この情報は、S209で2次元形状の寸法の測定を行う際に測定箇所を設定する為に用いられる。
S201で登録される測定対象物の情報は上記の情報を含んでいる。次にS202で、処理部8は、インコヒーレントな光を用いた画像を取得する。具体的には、処理部8は、光源9から射出されたインコヒーレントな光を被測定物5に照射して、その反射光を撮像素子7により撮像することによって画像を取得する。
S203で、処理部8は、S201で登録された複数の測定対象物の投影像の輪郭の情報(第1情報)とS202で得られた画像とを照合して被測定物5の種類、撮像素子7上の位置、方位を特定する(照合工程)。処理部8は、まずS202で得られた画像に対しエッジ検出等の画像処理を行い、被測定物5の撮像素子7上における位置、投影形状の輪郭を算出する。処理部8は、算出された投影形状の輪郭とS201で処理部8に登録しておいた投影像の輪郭の情報とを照合して被測定物5の種類、方位を設定する。処理部8は、S202で得られた画像のデータに対し、図8中の8bに示すような予め登録された被測定物5の投影像の輪郭の情報を撮像素子7の画面上で移動及び回転させながら2つの輪郭間の相関を調べる。処理部8は、8bの投影像の輪郭が図8に示す破線部と重なる状態、つまり最も相関が高くなる被測定物5の2次元投影形状、位置、方位を算出し、被測定物5の種類、位置、方位を設定する。
S204で、処理部8は、被測定物5のZ寸法の既知の情報、Z寸法の測定対象領域、Z寸法の測定密度を、S201で登録された情報に基づき設定する。S205で、処理部8は、S203で設定された撮像素子7上における被測定物5の位置、方位、S204で設定されたZ寸法の測定対象領域、Z寸法の測定密度から撮像素子7の撮像条件である読み出し画素領域及びビニングの少なくともいずれかを設定する。そして、処理部8は、読み出し画素領域またはビニングの設定を行う場合のフレームレートを設定し、変更する。
読み出し画素領域の設定とは、主に撮像素子7としてCMOSセンサーを用いた場合に、撮像素子7上においてデータを読み出す画素すなわちZ寸法の測定対象領域を設定することである。処理部8は、S204で設定された撮像素子7上での被測定物5の位置から被測定物5の全体が撮像素子7のどの画素上に位置しているか、つまり図8中の太い実線8cが示す被測定物5の全体を包含する最小領域の画素を認識する。Z寸法の測定対象領域が登録されていない場合、処理部8は、読み出し画素領域を領域8cに設定し、太い実線で囲まれた画素以外の画素のデータを読み出さないように撮像素子7の撮像条件を設定する。これによりデータの読み出し回数が減少しフレームレートが向上する。
Z寸法の測定対象領域が登録されている場合、処理部8は、被測定物5の全体を包含する最小領域の画素と被測定物5の方位とZ寸法の測定位置とからZ寸法の測定対象領域(斜線部8a)が撮像素子7のどの画素上に位置しているかを認識する。なお、被測定物5の方位はS203で、Z寸法の測定対象領域はS204でそれぞれ得られる。処理部8は、Z寸法の測定位置を包含する最小領域である太い実線で囲まれた領域(図9中の8d)の画素を、データを読み出す画素として設定し、測定対象領域8d以外の画素のデータを読み出ないように撮像素子7の撮像条件を設定する。これによりデータの読み出し回数がさらに減少しフレームレートが向上する。一般的なCMOSセンサーでは限定する領域の大きさによるが、全画素のデータを読み出す場合と比較して数〜数十倍のフレームレートが得られる。
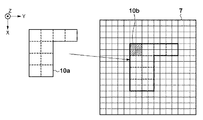
ビニングとは、主に撮像素子7にCCDセンサーを用いた場合に、ある画素の周辺の画素のデータを加算してまとめて読み出し、データを読み出す回数を少なくする方法である。被測定物5のZ寸法の測定範囲の単位となる領域が、図10に示すように、撮像素子7の4画素分に相当するとする。この場合、処理部8は、被測定物5のZ寸法の測定範囲の単位領域に対応する4画素(斜線部10b)の各画素のデータを加算して一度に読み出すように撮像素子7の撮像条件を設定する。これによりデータの読み出し回数が減少しフレームレートが向上する。
一般的なCCDにおいて正方形領域におけるN×N個の画素を一度に読み出すことにより、全画素でデータ読み出す場合と比較して約N〜N2倍のフレームレートが得られることが知られている。処理部8は、S204で設定されたZ寸法の測定密度ρと撮像素子7のピクセルスケールSとから、以下の式15を満たすようにビニングによりまとめて読み出す画素の数Nを設定し、変更して、より高速なフレームレートを得る。ここで、Z寸法の測定密度ρは被測定物5の単位面積当たりの測定点数であり、roundは最も近い整数へ丸める関数を表す。ビニングは、被測定物5の平面度や段差のみ測定したい場合等、Z寸法の測定密度がX、Y投影寸法測定に必要な分解能ほど高くない場合に有効である。
N=round{(ρ/s2)(1/2)}・・・(15)
S206で、処理部8は、計測光と参照光との干渉光の干渉縞の光路長差の最大値OPDmaxと撮像素子のフレームレートFR’とから、波長可変レーザー1の周波数の変化速度Δfを以下の式16に基づき設定する。処理部8は、実施形態1のS102と同様にして、サンプリング定理を満たすように周波数の変化速度Δfを設定する。光路長差の最大値OPDmaxは、S204で設定された被測定物5のZ寸法の既知の情報とZ寸法の測定対象領域とから得られる。フレームレートFR’は、S205で設定された撮像素子7の測定対象領域やビニングの設定を行った場合のフレームレートである。本実施形態では被測定物5の搭載する台面を参照面4aと共役な位置4bから距離Dだけ離した場所に設けている。そのため、光路長差の最大値OPDmaxは、被測定物5のZ寸法の概略値Hを用いて実施形態1と同様に{MAX(H)+D}で表すことができる。
Δf≦(FR’・C)/(8・π・OPDmax)・・・(16)
撮像素子7のフレームレートFR’は、測定対象領域やビニングの設定を行わない場合と比較して数倍〜数十倍程度高速になっている。そのため、OPDmaxの値によるが周波数の変化速度Δfも、同様に何もしない場合と比較して数倍〜数十倍程度多くすることが出来る。Z寸法の概略値が同じで大きさ、形状が異なる被測定物5、つまりOPDmaxが変化しない被測定物5を測定する場合やOPDmaxの変化を考慮しない場合でも撮像素子7のフレームレートを変更する場合には、S206でΔfを変更する必要がある。
N=round{(ρ/s2)(1/2)}・・・(15)
S206で、処理部8は、計測光と参照光との干渉光の干渉縞の光路長差の最大値OPDmaxと撮像素子のフレームレートFR’とから、波長可変レーザー1の周波数の変化速度Δfを以下の式16に基づき設定する。処理部8は、実施形態1のS102と同様にして、サンプリング定理を満たすように周波数の変化速度Δfを設定する。光路長差の最大値OPDmaxは、S204で設定された被測定物5のZ寸法の既知の情報とZ寸法の測定対象領域とから得られる。フレームレートFR’は、S205で設定された撮像素子7の測定対象領域やビニングの設定を行った場合のフレームレートである。本実施形態では被測定物5の搭載する台面を参照面4aと共役な位置4bから距離Dだけ離した場所に設けている。そのため、光路長差の最大値OPDmaxは、被測定物5のZ寸法の概略値Hを用いて実施形態1と同様に{MAX(H)+D}で表すことができる。
Δf≦(FR’・C)/(8・π・OPDmax)・・・(16)
撮像素子7のフレームレートFR’は、測定対象領域やビニングの設定を行わない場合と比較して数倍〜数十倍程度高速になっている。そのため、OPDmaxの値によるが周波数の変化速度Δfも、同様に何もしない場合と比較して数倍〜数十倍程度多くすることが出来る。Z寸法の概略値が同じで大きさ、形状が異なる被測定物5、つまりOPDmaxが変化しない被測定物5を測定する場合やOPDmaxの変化を考慮しない場合でも撮像素子7のフレームレートを変更する場合には、S206でΔfを変更する必要がある。
S207で、処理部8は、S205で変更した撮像素子7のFR’及びS206で設定した波長可変レーザー1の周波数の変化速度Δfに基づき波長可変レーザー1の周波数を変化させながら撮像素子7によりZ寸法測定用の画像を取得する。本実施形態では撮像素子7の測定対象領域やビニングの設定を行うことによるフレームレートFRの高速化を行っている。そのため、実施形態3では、波長可変レーザーの周波数の変化速度Δfを、実施形態1、2のS102で設定するよりもさらに数倍〜数十倍程度大きくすることができる。よって、実施形態3では、測定時間を実施形態1、2の場合と比較して数倍〜数十倍程度短縮することができる。
S208で、処理部8は、S207で取得した複数枚の画像から撮像素子7の各画素において、周波数解析を行い、得られた干渉信号の周波数νm,nを設定し、設定した周波数νm,nから被測定物5のZ寸法Hm,nを求める。ここでmは撮像素子の列方向の番号、nは撮像素子の列方向の番号を表す。処理部8は、S208で、実施形態1、2のS104と同様に、フーリエ変換等の処理を行って周波数解析を行う。
S209で、処理部8は、S202で得られたインコヒーレントな光の照明による画像、S203で設定した被測定物5の位置、方位とXY平面における投影寸法の測定位置からXY平面における投影寸法の解析を行う。この方法に関して図10を用いて説明する。図11中のL1、L2は被測定物5のXY平面における投影寸法の測定位置である。処理部8は、まず撮像素子7上の被測定物5の位置と方位、XY平面における投影寸法の測定位置からL1、L2間の画素数を算出する。次に、処理部8は、ピクセルスケールSとL1、L2間の画素数とからL1、L2の寸法を算出する等の方法でXY平面における投影寸法の解析を行う。XY平面における投影寸法の精度は、撮像素子7の分解能に依存し、画素数が多いほうが高い。したがって、インコヒーレントな光による画像の取得は、測定対象領域やビニングの設定を行わずに、撮像素子7の全画素のデータを用いる事が望ましい。
S201〜S209を行い、被測定物5の各点におけるZ寸法を一括して高速に測定すると共にインコヒーレントな光による画像からXY平面における投影寸法の測定も実現できる。また本実施形態においては測定対象領域やビニングの設定のみを行ってもフレームレートが数〜数十倍高速化する為、Z寸法を高速で測定することができる。本実施形態では、S201にて被測定物5のデータを一旦登録して測定を行った場合、次回以降の測定ではS202から始めればよい。また、本実施形態の光源の波長を、実施形態2のように、多波長としてZ寸法の測定を行ってもよい。
Claims (10)
- コヒーレントな光をその周波数を変化させながら被測定物と参照面とに照射して前記被測定物で反射された計測光と前記参照面で反射された参照光との干渉縞を撮像して前記被測定物の表面形状を測定する方法であって、
前記計測光の光軸と直交する基準面の上に投影された前記被測定物の像の輪郭の第1情報と前記表面形状の既知の第2情報との少なくともいずれかに基づいて、前記光の周波数を変化させる速度を設定する設定工程と、
前記被測定物及び前記参照面に照射する前記光の周波数を前記設定工程で設定された速度で変化させながら前記干渉縞の複数の画像を撮像素子により取得する取得工程と、
前記取得工程で取得された前記複数の画像に基づいて前記表面形状を求める工程と、
を含むことを特徴とする方法。 - 前記第2情報は、前記表面形状の設計情報又は前記表面形状の測定結果を示す情報であることを特徴とする請求項1に記載の方法。
- 前記取得工程で、前記周波数が変化する光に加えて周波数が固定されたコヒーレントな光を前記被測定物及び前記参照面に照射することを特徴とする請求項1又は請求項2に記載の方法。
- 前記設定工程は、前記第2情報から求められる前記参照光と前記計測光との光路長差の最大値と、前記撮像素子のフレームレートとに基づいて、前記速度を設定することを含むことを特徴とする請求項1乃至請求項3のいずれか1項に記載の方法。
- 複数の測定対象物のそれぞれについて、前記第1情報と、前記第2情報と、前記表面形状の測定対象領域及び測定密度の少なくともいずれかの情報とをデータベースに登録する登録工程と、
インコヒーレントな光を前記被測定物に照射して前記撮像素子により前記被測定物の2次元形状の画像を取得する工程と、
前記取得された2次元形状の画像と前記データベースに登録されている前記第1情報とを照合することによって被測定物を前記複数の測定対象物の中から特定する照合工程と、
をさらに含み、
前記設定工程は、
前記照合工程で特定された被測定物の前記データベースに登録されている情報に基づいて、前記表面形状を求めるのに必要な前記撮像素子における読み出し画素領域と前記撮像素子における画素のビニングとの少なくともいずれかを設定し、
前記設定された読み出し画素領域及び前記ビニングされる画素の数の少なくともいずれかに基づいて前記撮像素子のフレームレートを設定することによって前記速度を設定する
ことを含むことを特徴とする請求項1乃至請求項4のいずれか1項に記載の方法。 - 前記登録工程は、複数の測定対象物それぞれについて、前記第1情報と、前記第2情報と、前記表面形状の測定対象領域の情報とを少なくとも前記データベースに登録することを含み、
前記照合工程は、前記取得された2次元形状の画像と前記データベースに登録されている前記第1情報とを照合することによって被測定物を前記複数の測定対象物の中から特定するとともに前記特定された被測定物の前記撮像素子における位置を求めることを含み、
前記設定工程は、前記照合工程で求められた前記被測定物の前記撮像素子における位置と、前記照合工程で特定された被測定物の前記データベースに登録されている前記測定対象領域の情報とに基づいて、前記読み出し画素領域を設定し、該設定された読み出し画素領域に基づいて前記フレームレートを設定することによって前記速度を設定することを含む
ことを特徴とする請求項5に記載の方法。 - 前記登録工程は、複数の測定対象物それぞれについて、前記第1情報と、前記第2情報と、前記表面形状の測定密度の情報とを少なくとも前記データベースに登録することを含み、
前記設定工程は、前記照合工程で特定された被測定物の前記データベースに登録されている前記表面形状の測定密度の情報に基づいて、前記ビニングされる画素の数を設定し、該設定されたビニングされる画素の数に基づいて前記フレームレートを設定することによって前記速度を設定することを含む
ことを特徴とする請求項5に記載の方法。 - 前記取得された2次元形状の画像に基づいて、前記被測定物の2次元形状における寸法を求める工程をさらに含むことを特徴とする請求項5乃至請求項7のいずれか1項に記載の方法。
- 前記取得工程よりも大きなフレームレートで前記干渉縞の複数の画像を取得することを含むことを特徴とする請求項5乃至請求項8のいずれか1項に記載の方法。
- コヒーレントな光をその周波数を変化させながら被測定物と参照面とに照射して前記被測定物で反射された計測光と前記参照面で反射された参照光との干渉縞を撮像して前記被測定物の表面形状を測定する装置であって、
前記光を射出する光源と、
干渉縞を撮像する撮像素子と、
前記撮像素子により撮像された複数の干渉縞の画像に基づいて前記表面形状を求める処理部と、
を備え、
前記処理部は、
前記計測光の光軸と直交する基準面の上に投影された前記被測定物の像の輪郭及び位置の第1情報と前記表面形状の既知の第2情報との少なくともいずれかに基づいて、前記光の周波数を変化させる速度を設定し、
前記被測定物及び前記参照面に照射する前記光の周波数を前記設定された速度で変化させながら前記干渉縞の複数の画像を前記撮像素子により取得させ、
前記撮像素子により取得された複数の画像に基づいて前記表面形状を求める、
ことを特徴とする装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012053684A JP2013186089A (ja) | 2012-03-09 | 2012-03-09 | 表面形状の測定方法及び測定装置 |
| US13/762,447 US20130235385A1 (en) | 2012-03-09 | 2013-02-08 | Surface shape measurement method and measurement apparatus |
| EP13154752.3A EP2636988A1 (en) | 2012-03-09 | 2013-02-11 | Surface shape measurement method and measurement apparatus using wavelength scanning interferometry |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012053684A JP2013186089A (ja) | 2012-03-09 | 2012-03-09 | 表面形状の測定方法及び測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013186089A true JP2013186089A (ja) | 2013-09-19 |
| JP2013186089A5 JP2013186089A5 (ja) | 2015-04-23 |
Family
ID=47750444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012053684A Withdrawn JP2013186089A (ja) | 2012-03-09 | 2012-03-09 | 表面形状の測定方法及び測定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20130235385A1 (ja) |
| EP (1) | EP2636988A1 (ja) |
| JP (1) | JP2013186089A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017508968A (ja) * | 2014-03-05 | 2017-03-30 | シック アイヴィピー エービー | 物体の3d特性に関する画像データおよび情報を提供するための画像感知デバイスおよび測定システム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015169220A1 (zh) * | 2014-05-06 | 2015-11-12 | 宁波舜宇光电信息有限公司 | 转光三维成像装置和投射装置及其应用 |
| JP2016020891A (ja) * | 2014-06-20 | 2016-02-04 | 株式会社リコー | 形状計測システムおよび撮像装置 |
| CN104361226A (zh) * | 2014-11-05 | 2015-02-18 | 哈尔滨工业大学 | 共焦轴向响应曲线峰值位置提取算法 |
| CN104315994A (zh) * | 2014-11-05 | 2015-01-28 | 哈尔滨工业大学 | 共焦轴向响应曲线峰值位置提取算法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6995848B2 (en) * | 2001-12-10 | 2006-02-07 | Zygo Corporation | Method and apparatus for calibrating a wavelength-tuning interferometer |
| GB0611807D0 (en) * | 2006-06-14 | 2006-07-26 | Univ Huddersfield | A near common-path optical fibre interferometer for potentially fast on-line micro/nano scale surface measurement |
-
2012
- 2012-03-09 JP JP2012053684A patent/JP2013186089A/ja not_active Withdrawn
-
2013
- 2013-02-08 US US13/762,447 patent/US20130235385A1/en not_active Abandoned
- 2013-02-11 EP EP13154752.3A patent/EP2636988A1/en not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017508968A (ja) * | 2014-03-05 | 2017-03-30 | シック アイヴィピー エービー | 物体の3d特性に関する画像データおよび情報を提供するための画像感知デバイスおよび測定システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2636988A1 (en) | 2013-09-11 |
| US20130235385A1 (en) | 2013-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8908186B2 (en) | Apparatus for the absolute measurement of two dimensional optical path distributions using interferometry | |
| US20080068617A1 (en) | Fast 3d height measurement method and system | |
| EP3012576B1 (en) | Method for measuring a contour of an object | |
| US20140063230A1 (en) | Cell Feature Extraction and Labeling Thereof | |
| JP5663758B2 (ja) | 形状測定方法及び形状測定装置 | |
| JP2013186089A (ja) | 表面形状の測定方法及び測定装置 | |
| CN1952594B (zh) | 形貌测量方法及其测量装置 | |
| JP4544103B2 (ja) | 界面の位置測定方法および位置測定装置 | |
| CN114440789A (zh) | 旋转体速度、距离和三维形貌同步干涉测量方法及系统 | |
| JP5412959B2 (ja) | 光応用計測装置 | |
| US7304745B2 (en) | Phase measuring method and apparatus for multi-frequency interferometry | |
| EP3012577A1 (en) | Measurement method, measurement device, measurement program, and computer-readable recording medium recording measurement program | |
| JP2014092488A (ja) | 計測装置及び計測方法 | |
| CN109997010B (zh) | 用于优化干涉仪的光学性能的方法及设备 | |
| JP5518187B2 (ja) | 変形計測方法 | |
| Kapusi et al. | White light interferometry utilizing the large measuring volume of a nanopositioning and nanomeasuring machine | |
| JP4390957B2 (ja) | 縞解析における縞位相決定方法 | |
| JP5894464B2 (ja) | 計測装置 | |
| JP2011021991A (ja) | 分光立体形状測定装置及び分光立体形状測定方法 | |
| JP3396284B2 (ja) | 位相振幅測定装置 | |
| Hu et al. | 3D profile measurement by using projection speckle pattern correlation method | |
| JP2020153992A (ja) | 白色干渉計による形状測定装置 | |
| JP2001201326A (ja) | 干渉縞測定解析方法 | |
| Long et al. | Investigation of Project Moir: Interferometry Technique on Measuring Model Deformation | |
| US7898672B1 (en) | Real-time scanner-nonlinearity error correction for HDVSI |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150306 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150306 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20150522 |