JP2013106902A - 天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 - Google Patents
天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 Download PDFInfo
- Publication number
- JP2013106902A JP2013106902A JP2011256330A JP2011256330A JP2013106902A JP 2013106902 A JP2013106902 A JP 2013106902A JP 2011256330 A JP2011256330 A JP 2011256330A JP 2011256330 A JP2011256330 A JP 2011256330A JP 2013106902 A JP2013106902 A JP 2013106902A
- Authority
- JP
- Japan
- Prior art keywords
- top plate
- support mechanism
- deflection
- amount
- plate support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Apparatus For Radiation Diagnosis (AREA)
Abstract
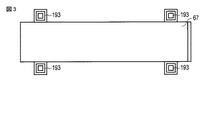
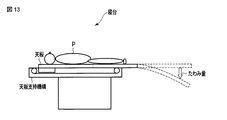
【解決手段】本実施形態に係る天板支持機構懸下装置は、天板を移動可能に支持する天板支持機構と、前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、を具備することを特徴とする。
【選択図】 図1
Description
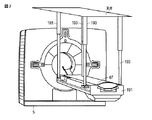
図1は、第1の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
第1の実施形態に係るX線コンピュータ断層撮影装置1は、高電圧発生部3、ガントリ5、前処理部7、再構成処理部9、表示部11、記憶部13、入力部15、ホストコントローラ17、天板支持機構懸下装置19を有する。
たわみ量低減機能とは、計測されたたわみ量に基づいて決定された天井天板間隔に懸下部材193の長さを変更するために懸下部材駆動部194を制御することにより、たわみ量を低減させる機能である。以下、たわみ量低減機能に関する処理(以下、たわみ量低減処理と呼ぶ)について説明する。
第1の実施形態との相違は、懸下部材193の長さの変更後にたわみ量を再度計測し、再度計測されたたわみ量が所定の閾値以下でない場合、懸下部材193の長さを再度変更することにある。
図8は、第1の実施形態の変形例に係り、天板67のたわみ量を所定の閾値以下にするために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、計測された天板67のたわみ量に応じて懸下部材193の長さを変更することができる。これにより、天板67のたわみ量を減少させることができ、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、懸下部材193の長さを変更することにより被検体Pの足元近傍を床に近づけることができ、被検体を緊急退避させやすくなる。
第1の実施形態との相違は、以下の通りである。まず、X線コンピュータ断層撮影前における被検体Pの透視画像またはサイノグラムに基づいて、移動された天板67の移動量に対するたわみ量を決定する。次いで、懸下部材193の長さを、決定されたたわみ量と移動量とに応じて変更することにある。
画像発生部20は、前処理部7から出力された投影データに基づいて、被検体Pの透視画像またはサイノグラムを発生する。
図10は、天板67のたわみ量に応じて懸下部材193の長さを変更するために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、X線コンピュータ断層撮影前に撮影された透視画像またはサイノグラムに基づいて決定された天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。これにより、X線コンピュータ断層撮影において、天板67の移動量に応じた天板67のたわみ量を減少させることができる。このことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
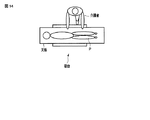
第1、第2の実施形態との相違は、天板67を撮影領域59に向けて移動させる前に、懸下部材193をガントリ5側に移動させることにより天板支持機構191をガントリ7の開口部に近づけることにある。
懸下部材移動部200は、懸下部材193をガントリ5側に移動させる。これにより、天板支持機構191は、ガントリ5の開口部に近接する。具体的には、懸下部材移動部200は、天井に設けられた図示していないレールと、レールから複数の懸下部材193を吊り下げる図示していないベースと、レールに沿ってベースを移動させるためにベースを駆動する図示していないベース駆動部とを有する。ホストコントローラ17からの指示に従って、ベース駆動部は、ベースを駆動させる。これにより、ベースは、レールに沿って移動する。
図12は、天板67のたわみ量に応じて懸下部材193の長さを変更するために懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。加えて、本X線コンピュータ断層撮影装置1によれば、天板67を移動させる前に懸下部材193をガントリ5側へ移動させることができる。これらにより、X線コンピュータ断層撮影において、天板67のたわみ量を減少させることができる。以上のことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
Claims (8)
- 天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とする天板支持機構懸下装置。 - 前記たわみ量に関する所定の閾値を記憶する記憶部をさらに具備し、
前記駆動制御部は、前記たわみ量を前記所定の閾値以下にするために、前記懸下部材駆動部を制御すること、
を特徴とする請求項1に記載の天板支持機構懸下装置。 - X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。 - 前記天板支持機構は、非ヘリカルなX線コンピュータ断層撮影に関して、前記天板を複数回にわたって移動させ、
前記計測部は、前記天板に関する複数回の移動ごとに前記たわみ量を計測し、
前記駆動制御部は、前記複数回の移動ごとに計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。 - 前記天板支持機構は、ヘリカルなX線コンピュータ断層撮影に関して、前記天板を所定期間にわたって移動させ、
前記計測部は、前記所定期間にわたって前記たわみ量を計測し、
前記駆動制御部は、前記所定期間にわたって計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。 - X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記X線検出器からの出力に基づいて、前記被検体の透視画像またはサイノグラムを発生する画像発生部と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記透視画像またはサイノグラムに基づいて、前記天板の移動量に対する前記天板のたわみ量を決定するたわみ量決定部と、
前記たわみ量と前記移動量とに応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。 - X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを回転軸周りに回転可能に支持する回転支持機構を有する架台と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板に被検体が載置されることを契機として、前記複数の懸下部材を、前記架台の開口まで移動させる懸下部材移動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。 - 被検体が載置された天板を架台の開口へ向かって移動し、
前記移動された天板に関するたわみ量を計測し、
前記たわみ量に応じて、前記天板を移動可能に支持する天板支持機構を天井から懸下する複数の懸架部材の長さを個々に制御すること、
を具備することを特徴とするたわみ量低減方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011256330A JP2013106902A (ja) | 2011-11-24 | 2011-11-24 | 天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011256330A JP2013106902A (ja) | 2011-11-24 | 2011-11-24 | 天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013106902A true JP2013106902A (ja) | 2013-06-06 |
Family
ID=48704298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011256330A Pending JP2013106902A (ja) | 2011-11-24 | 2011-11-24 | 天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013106902A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115251966A (zh) * | 2022-07-12 | 2022-11-01 | 赛诺威盛科技(北京)股份有限公司 | Ct扫描床下垂量补偿装置及ct扫描设备 |
| CN120167988A (zh) * | 2025-05-22 | 2025-06-20 | 上海顺泰诺医疗设备有限公司 | 一种ct扫描装置 |
-
2011
- 2011-11-24 JP JP2011256330A patent/JP2013106902A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115251966A (zh) * | 2022-07-12 | 2022-11-01 | 赛诺威盛科技(北京)股份有限公司 | Ct扫描床下垂量补偿装置及ct扫描设备 |
| CN120167988A (zh) * | 2025-05-22 | 2025-06-20 | 上海顺泰诺医疗设备有限公司 | 一种ct扫描装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104023642B (zh) | 医用图像诊断装置用床及医用图像诊断装置 | |
| CN103889331B (zh) | 医用图像诊断装置、医用图像处理装置以及医用图像处理方法 | |
| US8681933B2 (en) | X-ray computed tomography apparatus | |
| JP5675257B2 (ja) | 医用画像処理装置、x線コンピュータ断層撮影装置、医用画像処理方法および医用画像処理プログラム | |
| JP6283875B2 (ja) | 医用画像処理装置、x線診断装置およびx線コンピュータ断層撮影装置 | |
| JP6294008B2 (ja) | X線コンピュータ断層撮影装置、再構成処理方法および再構成処理プログラム | |
| JP6359278B2 (ja) | X線コンピュータ断層撮影装置、および医用画像処理装置 | |
| JP6425917B2 (ja) | X線コンピュータ断層撮影装置、天板制御装置、および天板制御方法 | |
| JP2013106902A (ja) | 天板支持機構懸下装置、x線コンピュータ断層撮影装置、およびたわみ量低減方法 | |
| JP6521575B2 (ja) | X線コンピュータ断層撮影装置 | |
| EP2866203A1 (en) | X-ray computed tomography apparatus, medical image processing apparatus, and medical image processing method | |
| JP5917106B2 (ja) | X線コンピュータ断層撮影装置およびブラシ交換タイミング出力方法 | |
| CN103458792B (zh) | X射线计算机断层摄影装置以及重构处理方法 | |
| JP6449383B2 (ja) | 医用画像処理装置、およびx線診断装置 | |
| JP2014042662A (ja) | X線コンピュータ断層撮影装置およびスキャン制御プログラム | |
| JP7224880B2 (ja) | X線撮影装置 | |
| JP2006068338A (ja) | 放射線撮影装置 | |
| JP6162446B2 (ja) | X線コンピュータ断層撮影装置、および線量減弱装置 | |
| JP2006116174A (ja) | 撮影装置 | |
| JP2014054388A (ja) | 医用画像診断装置用寝台およびx線コンピュータ断層撮影装置 | |
| JP2015144783A (ja) | 医用画像診断装置、細胞シート、および細胞シート検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131205 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131212 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131219 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131226 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140109 |