JP2013100823A - エンジン制御装置 - Google Patents
エンジン制御装置 Download PDFInfo
- Publication number
- JP2013100823A JP2013100823A JP2013013133A JP2013013133A JP2013100823A JP 2013100823 A JP2013100823 A JP 2013100823A JP 2013013133 A JP2013013133 A JP 2013013133A JP 2013013133 A JP2013013133 A JP 2013013133A JP 2013100823 A JP2013100823 A JP 2013100823A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- correction
- hydraulic
- control
- fuel injection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000002347 injection Methods 0.000 claims abstract description 122
- 239000007924 injection Substances 0.000 claims abstract description 122
- 239000000446 fuel Substances 0.000 claims abstract description 65
- 239000010720 hydraulic oil Substances 0.000 claims abstract description 52
- 238000012937 correction Methods 0.000 claims description 83
- 230000008859 change Effects 0.000 claims description 32
- 230000007423 decrease Effects 0.000 claims description 28
- 238000001514 detection method Methods 0.000 claims description 12
- 239000003921 oil Substances 0.000 abstract description 79
- 239000000779 smoke Substances 0.000 abstract description 6
- 230000003247 decreasing effect Effects 0.000 abstract description 4
- 230000001747 exhibiting effect Effects 0.000 abstract 1
- 239000000243 solution Substances 0.000 abstract 1
- 238000005259 measurement Methods 0.000 description 24
- 238000010248 power generation Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 8
- 230000008602 contraction Effects 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000009412 basement excavation Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000010705 motor oil Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images







Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【解決手段】エンジン7に燃料を噴射する燃料噴射装置106と、エンジン回転数を検出するエンジン回転センサ108と、エンジン回転数と燃料噴射量との関係を示す出力特性マップを予め記憶させたROM102bと、マップに基づいて燃料噴射装置の作動を制御するコントローラ102とを備える。エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、エンジンの低速回転域での最大燃料噴射量が増大するように、出力特性マップを一時的に補正する。マップの一時的な補正実行の可否は、油圧源から供給される作動油の油圧に基づき決定する。
【選択図】図4
Description
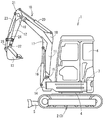
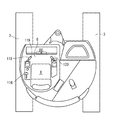
まず始めに、主に図1及び図2を参照しながら、バックホウ1の概要について説明する。なお、図2では説明の便宜上、キャビン6の図示を省略している。
次に、図3を参照しながら、バックホウ1の油圧系統30構造について説明する。
まず、ブームシリンダ16を駆動させる閉ループ油圧回路34について説明する。閉ループ油圧回路34は、前述した片ロッド複動形のブームシリンダ16と、斜板式のアキシャルピストンポンプモータである油圧ポンプモータ31とを備えている。ブームシリンダ16と油圧ポンプモータ31とは、ボトム側油路35及びロッド側油路36にて閉ループ状に接続されている。この場合、ブームシリンダ16のボトム油室37がボトム側油路35を介して油圧ポンプモータ31に接続され、ブームシリンダ16のロッド油室38がロッド側油路36を介して油圧ポンプモータ31に接続されている。
次に、旋回モータ9、アームシリンダ20及びバケットシリンダ23を駆動させるチャージ油圧回路74について説明する。チャージ油圧回路74は、前述した旋回モータ9と、片ロッド複動形のアームシリンダ20と、片ロッド複動形のバケットシリンダ23と、斜板式のアキシャルピストンポンプである油圧ポンプ32と、油圧調整機構75とを備えている。
次に、図4及び図5を参照しながら、バックホウ1の燃料噴射制御を実行するための構成について説明する。
次に、図6〜図9に示すフローチャートを参照しながら、燃料噴射制御の一例について説明する。
図7〜図9には補正噴射制御の別例を示している。これら別例における補正噴射制御の態様は、基本的に前述の第1実施例と同様であるが、出力特性マップMPの一時的な補正を実行する判断基準が第1実施例の場合(エンジン回転数Nの低下率D)と異なっている。
本願発明は、前述の実施形態に限らず、様々な態様に具体化できる。例えば本願発明はバックホウに限らず、コンバイン等の農作業機や、ホイルローダ等の特殊作業用車両にも適用可能である。その他、各部の構成は図示の実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変更が可能である。
7 エンジン
10 作業部
31 油圧源としての油圧ポンプモータ
32 油圧源としての油圧ポンプ
101 制御手段としての本機コントローラ
102 制御手段としての電子ガバナコントローラ
106 燃料噴射ポンプ
107 電子ガバナ
108 回転数検出手段としてのエンジン回転センサ
109 負荷検出手段としてのラック位置センサ
121 第1油圧センサ
122 第2油圧センサ
Claims (5)
- エンジンと、前記エンジンに燃料を噴射する燃料噴射装置と、エンジン回転数を検出する回転数検出手段と、エンジン回転数と燃料噴射量との関係を示す制御パターンを予め記憶させた記憶手段と、前記制御パターンに基づいて前記燃料噴射装置の作動を制御する制御手段とを備えているエンジン制御装置において、
前記エンジンの低速回転中にエンジン負荷の増大にてエンジン回転数が低下した場合は、前記エンジンの低速回転域での最大燃料噴射量が増大するように、前記制御パターンを一時的に補正して、前記補正した制御パターンに基づき燃料噴射量を制御する補正噴射制御を実行する構成であって、
前記制御パターンの一時的な補正実行の可否を、前記エンジンの動力にて駆動する油圧源から供給される作動油の油圧に基づき決定する、
エンジン制御装置。 - 前記油圧源からの作動油の油圧変化率が予め設定した設定油圧率以上である場合に、前記制御パターンの一時的な補正を許可する、
請求項1に記載のエンジン装置。 - 前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの負荷を検出する負荷検出手段から得られるエンジンの負荷率が規定値以上のときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。 - 前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジン回転数の前記目標値が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。 - 前記エンジンの始動後に前記補正噴射制御を1回以上実行した場合において、前記エンジンの前記負荷率が補正前の値から変化しないときは、前記制御パターンの一時的な補正を行わず前記補正噴射制御を実行しない、
請求項2に記載のエンジン装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013133A JP5554851B2 (ja) | 2013-01-28 | 2013-01-28 | エンジン制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013133A JP5554851B2 (ja) | 2013-01-28 | 2013-01-28 | エンジン制御装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008212610A Division JP5243889B2 (ja) | 2008-08-21 | 2008-08-21 | エンジン制御装置 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013250466A Division JP6014011B2 (ja) | 2013-12-03 | 2013-12-03 | エンジン制御装置 |
| JP2014111384A Division JP5856230B2 (ja) | 2014-05-29 | 2014-05-29 | 作業機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013100823A true JP2013100823A (ja) | 2013-05-23 |
| JP5554851B2 JP5554851B2 (ja) | 2014-07-23 |
Family
ID=48621615
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013013133A Expired - Fee Related JP5554851B2 (ja) | 2013-01-28 | 2013-01-28 | エンジン制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5554851B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105658936A (zh) * | 2013-06-14 | 2016-06-08 | 罗伯特·博世有限公司 | 发动机动力提升系统和方法 |
| CN108104965A (zh) * | 2017-12-13 | 2018-06-01 | 天津雷沃发动机有限公司 | 一种柴油机智能扭矩控制方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6014011B2 (ja) * | 2013-12-03 | 2016-10-25 | ヤンマー株式会社 | エンジン制御装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56121828A (en) * | 1980-02-29 | 1981-09-24 | Komatsu Ltd | Improving method of governor characteristic of diesel engine |
| JPH03225052A (ja) * | 1990-01-30 | 1991-10-04 | Honda Motor Co Ltd | エンジンの燃料噴射制御装置 |
| JPH09126020A (ja) * | 1995-11-07 | 1997-05-13 | Yanmar Diesel Engine Co Ltd | 電子ガバナの制御特性調整機構及び方法 |
| JPH1193750A (ja) * | 1997-09-22 | 1999-04-06 | Kubota Corp | メカニカルガバナ付き電子燃料噴射エンジン |
| JP2001140678A (ja) * | 1999-11-18 | 2001-05-22 | Sumitomo Constr Mach Co Ltd | 建設機械搭載のエンジン制御装置 |
| JP2004340152A (ja) * | 2004-06-16 | 2004-12-02 | Yanmar Co Ltd | 作業車搭載エンジンの制御機構 |
| JP2006257956A (ja) * | 2005-03-16 | 2006-09-28 | Yanmar Co Ltd | 燃料噴射システム |
| JP2008151001A (ja) * | 2006-12-15 | 2008-07-03 | Komatsu Ltd | 作業車両のエンジン負荷制御装置 |
-
2013
- 2013-01-28 JP JP2013013133A patent/JP5554851B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56121828A (en) * | 1980-02-29 | 1981-09-24 | Komatsu Ltd | Improving method of governor characteristic of diesel engine |
| JPH03225052A (ja) * | 1990-01-30 | 1991-10-04 | Honda Motor Co Ltd | エンジンの燃料噴射制御装置 |
| JPH09126020A (ja) * | 1995-11-07 | 1997-05-13 | Yanmar Diesel Engine Co Ltd | 電子ガバナの制御特性調整機構及び方法 |
| JPH1193750A (ja) * | 1997-09-22 | 1999-04-06 | Kubota Corp | メカニカルガバナ付き電子燃料噴射エンジン |
| JP2001140678A (ja) * | 1999-11-18 | 2001-05-22 | Sumitomo Constr Mach Co Ltd | 建設機械搭載のエンジン制御装置 |
| JP2004340152A (ja) * | 2004-06-16 | 2004-12-02 | Yanmar Co Ltd | 作業車搭載エンジンの制御機構 |
| JP2006257956A (ja) * | 2005-03-16 | 2006-09-28 | Yanmar Co Ltd | 燃料噴射システム |
| JP2008151001A (ja) * | 2006-12-15 | 2008-07-03 | Komatsu Ltd | 作業車両のエンジン負荷制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105658936A (zh) * | 2013-06-14 | 2016-06-08 | 罗伯特·博世有限公司 | 发动机动力提升系统和方法 |
| CN108104965A (zh) * | 2017-12-13 | 2018-06-01 | 天津雷沃发动机有限公司 | 一种柴油机智能扭矩控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5554851B2 (ja) | 2014-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101015680B1 (ko) | 유압 건설 기계의 제어 장치 | |
| JP5373310B2 (ja) | 作業機械 | |
| JP3511453B2 (ja) | 油圧建設機械の原動機と油圧ポンプの制御装置 | |
| JP5192367B2 (ja) | 作業車両および作業車両の制御方法 | |
| WO2010147121A1 (ja) | ハイブリッド型建設機械及びハイブリッド型建設機械の制御方法 | |
| KR100739419B1 (ko) | 유압구동 제어장치 및 그것을 구비하는 유압셔블 | |
| JP5243889B2 (ja) | エンジン制御装置 | |
| JP5129062B2 (ja) | エンジン制御装置 | |
| JP5485007B2 (ja) | 作業車両の油圧制御装置 | |
| JP6177913B2 (ja) | ショベル及びショベルの制御方法 | |
| US10329739B2 (en) | Construction machine | |
| WO2020003811A1 (ja) | 建設機械 | |
| US11248364B2 (en) | Work machine | |
| JP5856230B2 (ja) | 作業機械 | |
| JP7530340B2 (ja) | 作業機の油圧システム | |
| JP5554851B2 (ja) | エンジン制御装置 | |
| JP2008151211A (ja) | 建設機械のエンジン始動システム | |
| CN112424429B (zh) | 装卸作业车辆 | |
| EP1398512A1 (en) | Hydraulic driving unit for working machine, and method of hydraulic drive | |
| JP6014011B2 (ja) | エンジン制御装置 | |
| KR20190109549A (ko) | 건설기계의 제어 시스템 및 건설기계의 제어 방법 | |
| JP2009275776A (ja) | 流体圧アクチュエータ制御回路 | |
| JP2004011488A (ja) | 建設機械のエンジン制御装置 | |
| JP7193419B2 (ja) | 建設機械 | |
| JP7034010B2 (ja) | ホイール式作業機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130919 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131009 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5554851 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |