JP2013078377A - 内視鏡システム及び内視鏡の外部制御装置 - Google Patents
内視鏡システム及び内視鏡の外部制御装置 Download PDFInfo
- Publication number
- JP2013078377A JP2013078377A JP2011218562A JP2011218562A JP2013078377A JP 2013078377 A JP2013078377 A JP 2013078377A JP 2011218562 A JP2011218562 A JP 2011218562A JP 2011218562 A JP2011218562 A JP 2011218562A JP 2013078377 A JP2013078377 A JP 2013078377A
- Authority
- JP
- Japan
- Prior art keywords
- data
- word
- signal
- imaging
- synchronization data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/81—Camera processing pipelines; Components thereof for suppressing or minimising disturbance in the image signal generation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Radiology & Medical Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
【解決手段】内視鏡10に接続されたプロセッサ装置11では、内視鏡10の撮像チップ42からシリアル伝送された撮像信号をS/P変換器81でパラレルデータに変換した後、8B10Bデコーダ82で復号化する。撮像信号にはワード同期データが所定間隔で挿入されており、プロセッサ装置11では、そのワード同期データを複数回検出した場合に、適正なワード同期データと判断してワード同期させる処理を実施する。
【選択図】図9
Description
Claims (11)
- 内視鏡の挿入部先端に搭載された固体撮像素子を有する撮像装置と、
内視鏡に対する外部装置として前記撮像装置に信号線により接続され、前記撮像装置を制御する外部制御装置と、
前記撮像装置において前記固体撮像素子により撮像信号として順次出力された画素データを1画素ごとに順次符号化して1ワードごとのワードデータに順次変換する符号化手段と、
前記撮像装置において前記符号化手段によりワードデータに順次変換された撮像信号をパラレル信号からシリアル信号へと変換して前記信号線を通じて前記外部制御装置へと送信する撮像信号送信手段と、
前記撮像装置において前記撮像信号送信手段により送信する撮像信号にワード同期のためのワード同期データを所定間隔で挿入する同期データ挿入手段と、
前記外部制御装置において前記撮像信号送信手段により送信された撮像信号を受信し、該撮像信号として順次受信したワードデータを1ワードごとにシリアル信号からパラレル信号へと順次変換する撮像信号受信手段と、
前記外部制御装置において前記撮像信号受信手段によりパラレル信号に順次変換されたワードデータを1ワードごとに順次復号化して前記符号化手段による符号化を行う前の1画素ごとの画素データに順次変換する復号化手段と、
前記外部制御装置において前記撮像信号受信手段により受信した撮像信号から前記ワード同期データを検出する同期データ検出手段と、
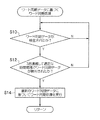
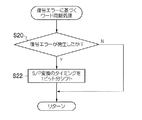
前記外部制御装置において前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングで前記ワード同期データが前記同期データ検出手段により複数回検出された場合に、該検出されたワード同期データに基づいて、前記撮像信号受信手段によるパラレル信号への変換又は前記復号化手段による画素データへの変換において1ワードごとのワードデータに区切るタイミングを調整してワード同期させる同期処理手段と、
を備えた内視鏡システム。 - 前記同期処理手段は、前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングで前記ワード同期データが前記同期データ検出手段により複数回連続して検出された場合に、該複数回連続して検出されたワード同期データのうちの最後に検出されたワード同期データに基づいてワード同期させるものとする請求項1に記載の内視鏡システム。
- 前記同期処理手段は、所定時間の期間内において前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングのうちのいずれか複数のタイミングで前記ワード同期データが前記同期データ検出手段により検出された場合に、該複数回検出されたワード同期データのうちに最後に検出されたワード同期データに基づいてワード同期させるものとする請求項1に記載の内視鏡システム。
- 前記符号化手段は、8ビットの画素データを8B10B方式により符号化して10ビットを1ワードとするワードデータに変換する8B10Bエンコーダであり、
前記復号化手段は、前記符号化手段により符号化されたワードデータを8B10B方式により1ワードごとに復号化して前記8B10Bエンコーダにより符号化される前の8ビットの画素データに変換する8B10Bデコーダであるものとする請求項1、2、又は3に記載の内視鏡システム。 - 前記撮像信号受信手段は、前記撮像信号送信手段により撮像信号として送信されたシリアル信号からクロック信号を抽出すると共に、該クロック信号により撮像信号をリタイミングするクロックデータリカバリ回路を含むものとする請求項1〜4のうちのいずれか1項に記載の内視鏡システム。
- 前記撮像装置の固体撮像素子は、CMOS画との固体撮像素子であるものとする請求項1〜5のうちのいずれか1項に記載の内視鏡システム。
- 内視鏡の撮像装置を制御すると共に該撮像装置からシリアル信号として伝送される撮像信号を受信する外部制御装置であって、前記撮像信号として前記撮像装置から順次出力された画素データを1画素ごとに順次符号化した1ワードごとのワードデータで、かつ、ワード同期のためのワード同期データが所定間隔で挿入されたワードデータを順次受信する内視鏡の外部制御装置であって、
前記外部制御装置において前記撮像信号送信手段により送信された撮像信号を受信し、該撮像信号として順次受信したワードデータを1ワードごとにシリアル信号からパラレル信号へと順次変換する撮像信号受信手段と、
前記外部制御装置において前記撮像信号受信手段によりパラレル信号に順次変換されたワードデータを1ワードごとに順次復号化して前記符号化手段による符号化を行う前の1画素ごとの画素データに順次変換する復号化手段と、
前記外部制御装置において前記撮像信号受信手段により受信した撮像信号から前記ワード同期データを検出する同期データ検出手段と、
前記外部制御装置において前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングで前記ワード同期データが前記同期データ検出手段により複数回検出された場合に、該検出されたワード同期データに基づいて、前記撮像信号受信手段によるパラレル信号への変換又は前記復号化手段による画素データへの変換において1ワードごとのワードデータに区切るタイミングを調整してワード同期させる同期処理手段と、
を備えた内視鏡の外部制御装置。 - 前記同期処理手段は、前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングで前記ワード同期データが前記同期データ検出手段により複数回連続して検出された場合に、該複数回連続して検出されたワード同期データのうちの最後に検出されたワード同期データに基づいてワード同期させるものとする請求項7に記載の内視鏡の外部制御装置。
- 前記同期処理手段は、所定時間の期間内において前記同期データ挿入手段により前記撮像信号に挿入された前記ワード同期データが検出されるべきタイミングのうちのいずれか複数のタイミングで前記ワード同期データが前記同期データ検出手段により検出された場合に、該複数回検出されたワード同期データのうちに最後に検出されたワード同期データに基づいてワード同期させるものとする請求項7に記載の内視鏡の外部制御装置。
- 前記撮像装置から撮像信号として伝送されるワードデータは、8ビットの画素データを8B10B方式により符号化した10ビットを1ワードとするワードデータであり、
前記復号化手段は、前記符号化手段により符号化されたワードデータを8B10B方式により1ワードごとに復号化して符号化される前の8ビットの画素データに変換する8B10Bデコーダであるものとする請求項7、8、又は9に記載の内視鏡の外部制御装置。 - 前記撮像信号受信手段は、前記撮像信号送信手段により撮像信号として送信されたシリアル信号からクロック信号を抽出すると共に、該クロック信号により撮像信号をリタイミングするクロックデータリカバリ回路を含むものとする請求項7〜10のうちのいずれか1項に記載の内視鏡の外部制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011218562A JP2013078377A (ja) | 2011-09-30 | 2011-09-30 | 内視鏡システム及び内視鏡の外部制御装置 |
| EP12185810A EP2575353A1 (en) | 2011-09-30 | 2012-09-25 | Endoscope system and external control device for endoscope |
| CN2012103617216A CN103027658A (zh) | 2011-09-30 | 2012-09-25 | 内窥镜系统和用于内窥镜的外部控制设备 |
| US13/631,451 US20130176409A1 (en) | 2011-09-30 | 2012-09-28 | Endoscope system and external control device for endoscope |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011218562A JP2013078377A (ja) | 2011-09-30 | 2011-09-30 | 内視鏡システム及び内視鏡の外部制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013078377A true JP2013078377A (ja) | 2013-05-02 |
| JP2013078377A5 JP2013078377A5 (ja) | 2013-06-13 |
Family
ID=46970074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011218562A Pending JP2013078377A (ja) | 2011-09-30 | 2011-09-30 | 内視鏡システム及び内視鏡の外部制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20130176409A1 (ja) |
| EP (1) | EP2575353A1 (ja) |
| JP (1) | JP2013078377A (ja) |
| CN (1) | CN103027658A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014124245A (ja) * | 2012-12-25 | 2014-07-07 | Hoya Corp | 内視鏡 |
| CN105472388A (zh) * | 2015-12-08 | 2016-04-06 | 浙江大华技术股份有限公司 | 一种颜色滤波阵列图像的编解码方法、装置和系统 |
| WO2017017972A1 (ja) * | 2015-07-24 | 2017-02-02 | オリンパス株式会社 | 画像データ伝送システム |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103650476B (zh) | 2011-05-12 | 2018-05-01 | 德普伊辛迪斯制品公司 | 对具有最小纵向互连的混合图像传感器使用堆叠方案的像素阵列区域最优化 |
| BR112015001369A2 (pt) | 2012-07-26 | 2017-07-04 | Olive Medical Corp | sistema de câmera com sensor de imagem cmos monolítico de área mínima |
| CA2906975A1 (en) | 2013-03-15 | 2014-09-18 | Olive Medical Corporation | Minimize image sensor i/o and conductor counts in endoscope applications |
| US10517469B2 (en) * | 2013-03-15 | 2019-12-31 | DePuy Synthes Products, Inc. | Image sensor synchronization without input clock and data transmission clock |
| WO2017016526A1 (en) | 2015-07-30 | 2017-02-02 | Zhejiang Dahua Technology Co., Ltd. | Methods and systems for image compression |
| US10284838B2 (en) | 2016-08-19 | 2019-05-07 | Titan Medical Inc. | Method and apparatus for transmitting images captured by first and second image sensors |
| CN110248584B (zh) * | 2017-02-01 | 2022-02-18 | 富士胶片株式会社 | 内窥镜系统及其工作方法 |
| US10057523B1 (en) * | 2017-02-13 | 2018-08-21 | Alexander Krymski | Image sensors and methods with multiple phase-locked loops and serializers |
| US11986160B2 (en) * | 2019-06-20 | 2024-05-21 | Cllag GmbH International | Image synchronization without input clock and data transmission clock in a pulsed hyperspectral imaging system |
| CN110367910A (zh) * | 2019-08-23 | 2019-10-25 | 重庆金山科技(集团)有限公司 | 内窥镜接头、内窥镜镜体、内窥镜冷光源及内窥镜系统 |
| CN114224268B (zh) * | 2022-02-24 | 2022-05-03 | 极限人工智能有限公司 | 图像处理装置以及内窥镜影像系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001223684A (ja) * | 2000-02-08 | 2001-08-17 | Sony Corp | 同期検出装置、受信装置およびその方法 |
| JP2009201540A (ja) * | 2008-02-26 | 2009-09-10 | Fujinon Corp | 撮像システム及び内視鏡システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6988238B1 (en) * | 2000-01-24 | 2006-01-17 | Ati Technologies, Inc. | Method and system for handling errors and a system for receiving packet stream data |
| JP4475778B2 (ja) | 2000-09-04 | 2010-06-09 | Hoya株式会社 | 撮像素子への電力供給を制御する電子内視鏡装置 |
| JP2004305373A (ja) * | 2003-04-04 | 2004-11-04 | Pentax Corp | 電子内視鏡システム |
| US7773110B2 (en) * | 2004-04-16 | 2010-08-10 | Fujinon Corporation | Electronic endoscope apparatus |
| JP2008068021A (ja) * | 2006-09-15 | 2008-03-27 | Olympus Corp | 電子内視鏡装置 |
-
2011
- 2011-09-30 JP JP2011218562A patent/JP2013078377A/ja active Pending
-
2012
- 2012-09-25 EP EP12185810A patent/EP2575353A1/en not_active Withdrawn
- 2012-09-25 CN CN2012103617216A patent/CN103027658A/zh active Pending
- 2012-09-28 US US13/631,451 patent/US20130176409A1/en not_active Abandoned
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001223684A (ja) * | 2000-02-08 | 2001-08-17 | Sony Corp | 同期検出装置、受信装置およびその方法 |
| JP2009201540A (ja) * | 2008-02-26 | 2009-09-10 | Fujinon Corp | 撮像システム及び内視鏡システム |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014124245A (ja) * | 2012-12-25 | 2014-07-07 | Hoya Corp | 内視鏡 |
| US9591198B2 (en) | 2012-12-25 | 2017-03-07 | Hoya Corporation | Endoscope for outputting signal |
| WO2017017972A1 (ja) * | 2015-07-24 | 2017-02-02 | オリンパス株式会社 | 画像データ伝送システム |
| JP6087037B1 (ja) * | 2015-07-24 | 2017-03-01 | オリンパス株式会社 | 画像データ伝送システム |
| CN105472388A (zh) * | 2015-12-08 | 2016-04-06 | 浙江大华技术股份有限公司 | 一种颜色滤波阵列图像的编解码方法、装置和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130176409A1 (en) | 2013-07-11 |
| EP2575353A1 (en) | 2013-04-03 |
| CN103027658A (zh) | 2013-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5588949B2 (ja) | 内視鏡システム及び内視鏡の外部制御装置 | |
| JP2013078377A (ja) | 内視鏡システム及び内視鏡の外部制御装置 | |
| JP2013075100A (ja) | 内視鏡システム及び内視鏡の外部制御装置 | |
| JP5463210B2 (ja) | 内視鏡システム | |
| JP2009201540A (ja) | 撮像システム及び内視鏡システム | |
| EP2094002A2 (en) | Electronic communication system and endoscope system | |
| US7557834B2 (en) | Image pickup apparatus and synchronization signal generating apparatus | |
| US7782396B2 (en) | Frame rate converting apparatus and imaging apparatus | |
| US8040374B2 (en) | Head separated camera apparatus | |
| JP2015080702A (ja) | 内視鏡装置 | |
| JP2005311535A (ja) | 撮像装置及びその位相補償方法、並びに制御プログラム | |
| JP6602713B2 (ja) | 内視鏡装置 | |
| WO2019064681A1 (ja) | 内視鏡および内視鏡システム | |
| JP6180683B2 (ja) | 撮像装置 | |
| WO2020144777A1 (ja) | 撮像素子、内視鏡および制御装置 | |
| US11258990B2 (en) | Imaging system and imaging method | |
| JP2011055543A (ja) | ヘッド分離型カメラ装置及びデジタルビデオ信号送信方法 | |
| JP2016106902A (ja) | 内視鏡装置 | |
| JPH0686138A (ja) | 画像撮像装置 | |
| CN110971793A (zh) | 摄像设备和通信方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130404 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140417 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140827 |