JP2013042411A - 画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 - Google Patents
画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 Download PDFInfo
- Publication number
- JP2013042411A JP2013042411A JP2011178809A JP2011178809A JP2013042411A JP 2013042411 A JP2013042411 A JP 2013042411A JP 2011178809 A JP2011178809 A JP 2011178809A JP 2011178809 A JP2011178809 A JP 2011178809A JP 2013042411 A JP2013042411 A JP 2013042411A
- Authority
- JP
- Japan
- Prior art keywords
- image
- plane
- distance
- data
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3185—Geometric adjustment, e.g. keystone or convergence
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3191—Testing thereof
- H04N9/3194—Testing thereof including sensor feedback
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/48—Details of cameras or camera bodies; Accessories therefor adapted for combination with other photographic or optical apparatus
- G03B17/54—Details of cameras or camera bodies; Accessories therefor adapted for combination with other photographic or optical apparatus with projector
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B21/00—Projectors or projection-type viewers; Accessories therefor
- G03B21/14—Details
- G03B21/53—Means for automatic focusing, e.g. to compensate thermal effects
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Geometry (AREA)
- Projection Apparatus (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Controls And Circuits For Display Device (AREA)
- Image Processing (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
【解決手段】
画像が投影されている対象物を含む領域を撮像して、画像データを取得する撮像手段と、前記画像データに基づき、前記対象物と前記撮像手段との離間距離に関する距離データを算出する測距手段と、前記距離データから、前記対象物に対応する平面を推定する平面推定手段と、前記距離データと前記平面に関する情報とに基づき、投影する画像の補正に関する情報を算出する補正情報算出手段と、を有することを特徴とする画像処理装置。
【選択図】図2
Description
図1は、画像処理装置の一例を示す概略構成図である。
画像処理装置の機能の一例を、図2を用いて、説明する。図2は、画像処理装置の機能ブロック図である。
測距手段が、撮像手段のステレオカメラにより、撮像手段(画像処理装置)から対応点(投影対象物)までの距離に関する距離データを算出する動作を説明する。

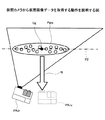
平面推定手段等が、投影対象物に対応する平面を推定する動作について、図3乃至図5を用いて説明する。図3は、平面推定手段等が平面を推定する動作の一例を示すフローチャートである。図4は、撮像手段が投影対象物を撮像する動作の一例を説明する図である。図5は、回帰分析によって、平面を推定する方法を説明する図である。
補正情報算出手段が、補正の情報を算出する動作ついて、図6乃至図9を用いて、説明する。
本発明のプログラムPrは、撮像手段により、画像が投影されている対象物を含む領域を撮像して、画像データを取得する工程と、画像データに基づき、撮像手段と対象物との離間距離に関する距離データを算出する工程と、距離データから、対象物に対応する平面を推定する工程と、距離データと平面に関する情報とに基づき、投影する画像の補正に関する情報を算出する工程と、を実行する。
プロジェクタの実施例を用いて、本発明の画像処理装置及び画像処理方法を説明する。
図10は、本実施例のプロジェクタの概略構成図の一例である。
プロジェクタが、投影する画像を校正する動作について、図11乃至図13を用いて説明する。図11は、本実施例のプロジェクタの投影動作の一例を示すフローチャートである。図12は、投影された画像の特徴点及び対応点の抽出を説明する図である。図13は、投影する画像の補正を説明する図である。
図11において、プロジェクタの制御手段は、操作パネル等からの入力により、画像を投影する動作の校正を開始するため、投影手段等に動作の指示を出力する(ステップS301)。その後、ステップS302に進む。
図14は、本実施例のプロジェクタの概略構成図の一例である。
プロジェクタの測距手段が、特徴点を抽出する動作について説明する。基本的な動作は、前述の(測距する動作)と同様のため、説明を省略する。
図16は、本実施例のプロジェクタの概略構成図の一例である。
平面推定手段が、ポリゴンメッシュにより法線ベクトルを算出し、その法線ベクトルに基づいて、投影対象物に対応する平面を推定する動作を説明する。基本的な動作は、前述の(平面を推定する動作)と同様のため、説明を省略する。
図19は、本実施例のプロジェクタシステムの概略構成図の一例である。
投影対象物と近い位置に配置して使用するプロジェクタ(短焦点プロジェクタ、至近プロジェクタなど)においては、広角レンズ(画角の広いレンズ、焦点距離が短いレンズなど)を利用して、投影した画像を撮像する。この場合、撮像した画像のザイデル収差(球面収差、コマ収差、非点収差、像面湾曲、及び、歪曲収差など)を補正する必要がある。
130 : 測距手段
140 : 平面推定手段
150 : 補正情報算出手段
160 : 位置移動判断手段
210 : 投影手段
230 : 投影用画像生成手段
100 : 画像処理装置
200、300、400: プロジェクタ
500 : プロジェクタシステム
Pr : プログラム
Md : 記録媒体
Dp : パターン画像(ドットパターン)
Dd1: 第1の距離データ
Dd2: 第2の距離データ
Claims (10)
- 画像が投影されている対象物を含む領域を撮像して、画像データを取得する撮像手段と、
前記画像データに基づき、前記対象物と前記撮像手段との離間距離に関する距離データを算出する測距手段と、
前記距離データから、前記対象物に対応する平面を推定する平面推定手段と、
前記距離データと前記平面に関する情報とに基づき、投影する画像の補正に関する情報を算出する補正情報算出手段と、
を有することを特徴とする画像処理装置。 - 前記撮像手段と前記対象物との位置に関する関係が変化したか否かを判断する位置移動判断手段を有し、
前記撮像手段は、所定の時間間隔で、前記領域を撮像して、複数の画像データを取得し、
前記測距手段は、前記複数の画像データから、前記所定の時間間隔に対応する複数の第1の距離データを算出し、
前記平面推定手段は、前記第1の距離データから、複数の平面を推定し、
前記位置移動判断手段は、前記複数の平面において、前記所定の時間間隔に対応する一の平面と他の平面とを比較することにより、前記撮像手段と前記対象物との位置に関する関係が変化したか否かを判断し、
前記補正情報算出手段は、前記位置移動判断手段が前記位置に関する関係が変化したと判断した場合に、変化した後の位置に関する関係に基づいて、前記補正に関する情報を算出する、
ことを特徴とする請求項1に記載の画像処理装置。 - 前記投影する画像は、パターン画像を含み、
前記測距手段は、前記パターン画像を抽出し、前記パターン画像に対応する距離データを算出することを特徴とする請求項1または2に記載の画像処理装置。 - 前記測距手段は、前記領域に対応する複数の第2の距離データを算出し、
前記平面推定手段は、前記第2の距離データに基づき、複数の法線ベクトルを算出し、前記法線ベクトルから前記平面を推定する、
ことを特徴とする請求項1または2に記載の画像処理装置。 - 請求項1乃至4のいずれか一項に記載の画像処理装置と、
前記補正に関する情報に基づき、投影する画像を補正する投影用画像生成手段と、
前記投影用画像生成手段が補正した前記投影する画像を投影する投影手段と、
を有する、
ことを特徴とするプロジェクタ。 - 前記投影用画像生成手段は、無線または有線により、前記プロジェクタと通信することを特徴とする請求項5に記載のプロジェクタを有するプロジェクタシステム。
- 撮像手段により、画像が投影されている対象物を含む領域を撮像して、画像データを取得する工程と、
前記画像データに基づき、前記撮像手段と前記対象物との離間距離に関する距離データを算出する工程と、
前記距離データから、前記対象物に対応する平面を推定する工程と、
前記距離データと前記平面に関する情報とに基づき、投影する画像の補正に関する情報を算出する工程と、
を含むことを特徴とする画像処理方法。 - 前記画像データを取得する工程は、所定の時間間隔で、前記領域を撮像して、複数の画像データを取得する工程を含み、
前記距離データを算出する工程は、前記複数の画像データから、前記所定の時間間隔に対応する複数の第1の距離データを算出する工程を含み、
前記平面を推定する工程は、前記第1の距離データから、前記所定の時間間隔に対応する複数の平面を推定する工程を含み、
前記複数の平面において、前記所定の時間間隔に対応する一の平面と他の平面とを比較することにより、前記撮像手段と前記対象物との位置に関する関係が変化したか否かを判断する工程と、
前記判断する工程において、前記位置に関する関係が変化したと判断した場合に、変化した後の位置に関する関係に基づいて、前記補正に関する情報を算出する工程と、
を有することを特徴とする請求項7に記載の画像処理方法。 - 請求項7または8に記載の画像処理方法をコンピュータに実行させるためのプログラム。
- 請求項9に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011178809A JP5961945B2 (ja) | 2011-08-18 | 2011-08-18 | 画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 |
| CN201280039743.9A CN103765870B (zh) | 2011-08-18 | 2012-08-09 | 图像处理装置、包括图像处理装置的投影仪和投影仪系统、图像处理方法 |
| US14/238,689 US9759548B2 (en) | 2011-08-18 | 2012-08-09 | Image processing apparatus, projector and projector system including image processing apparatus, image processing method |
| PCT/JP2012/070784 WO2013024882A1 (en) | 2011-08-18 | 2012-08-09 | Image processing apparatus, projector and projector system including image processing apparatus, image processing method |
| EP12823869.8A EP2745504B1 (en) | 2011-08-18 | 2012-08-09 | Image projector, image processing method, computer program and recording medium |
| AU2012295789A AU2012295789B2 (en) | 2011-08-18 | 2012-08-09 | Image processing apparatus, projector and projector system including image processing apparatus, image processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011178809A JP5961945B2 (ja) | 2011-08-18 | 2011-08-18 | 画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013042411A true JP2013042411A (ja) | 2013-02-28 |
| JP5961945B2 JP5961945B2 (ja) | 2016-08-03 |
Family
ID=47715198
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011178809A Active JP5961945B2 (ja) | 2011-08-18 | 2011-08-18 | 画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9759548B2 (ja) |
| EP (1) | EP2745504B1 (ja) |
| JP (1) | JP5961945B2 (ja) |
| CN (1) | CN103765870B (ja) |
| AU (1) | AU2012295789B2 (ja) |
| WO (1) | WO2013024882A1 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014179698A (ja) * | 2013-03-13 | 2014-09-25 | Ricoh Co Ltd | プロジェクタ及びプロジェクタの制御方法、並びに、その制御方法のプログラム及びそのプログラムを記録した記録媒体 |
| JP2014187515A (ja) * | 2013-03-22 | 2014-10-02 | Seiko Epson Corp | プロジェクター及びプロジェクターの制御方法 |
| JP2015057876A (ja) * | 2013-08-13 | 2015-03-26 | 株式会社リコー | 画像処理装置、画像処理システム、画像処理方法、及びプログラム |
| EP2876876A2 (en) | 2013-11-22 | 2015-05-27 | Ricoh Company, Ltd. | Image projection apparatus, image projection method, and computer-readable storage medium |
| JP2015139087A (ja) * | 2014-01-22 | 2015-07-30 | 株式会社リコー | 投影装置 |
| JP2015173431A (ja) * | 2014-02-18 | 2015-10-01 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 投影システムおよび半導体集積回路 |
| JP2016014712A (ja) * | 2014-07-01 | 2016-01-28 | キヤノン株式会社 | シェーディング補正値算出装置およびシェーディング補正値算出方法 |
| JP2016167268A (ja) * | 2015-03-06 | 2016-09-15 | 国立大学法人 筑波大学 | ジェスチャモデリング装置、ジェスチャモデリング方法、ジェスチャモデリングシステム用のプログラム、およびジェスチャモデリングシステム |
| US9560327B2 (en) | 2014-02-19 | 2017-01-31 | Ricoh Company, Limited | Projection system and projection method |
| JP2017073705A (ja) * | 2015-10-08 | 2017-04-13 | 富士通株式会社 | 投影装置、映像投影方法及び映像投影用コンピュータプログラム |
| WO2020013021A1 (ja) * | 2018-07-13 | 2020-01-16 | 株式会社ニコン | 検出装置、処理装置、検出方法、及び処理プログラム |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11321772B2 (en) | 2012-01-12 | 2022-05-03 | Kofax, Inc. | Systems and methods for identification document processing and business workflow integration |
| US9105103B2 (en) * | 2013-01-23 | 2015-08-11 | Leap Motion, Inc. | Systems and methods of tracking object movements in three-dimensional space |
| US10783615B2 (en) | 2013-03-13 | 2020-09-22 | Kofax, Inc. | Content-based object detection, 3D reconstruction, and data extraction from digital images |
| US11620733B2 (en) | 2013-03-13 | 2023-04-04 | Kofax, Inc. | Content-based object detection, 3D reconstruction, and data extraction from digital images |
| US10127636B2 (en) * | 2013-09-27 | 2018-11-13 | Kofax, Inc. | Content-based detection and three dimensional geometric reconstruction of objects in image and video data |
| KR20150058660A (ko) * | 2013-11-19 | 2015-05-29 | 삼성전자주식회사 | 이미지 처리 장치, 이의 동작 방법, 및 이를 포함하는 시스템 |
| CN104460197A (zh) * | 2014-11-25 | 2015-03-25 | 深圳先进技术研究院 | 一种可自动校正几何失真的投影机及其校正方法 |
| CN104486573B (zh) * | 2014-12-22 | 2017-11-28 | 联想(北京)有限公司 | 一种信息处理方法和电子设备 |
| DE102015210879A1 (de) * | 2015-06-15 | 2016-12-15 | BSH Hausgeräte GmbH | Vorrichtung zur Unterstützung eines Nutzers in einem Haushalt |
| US10467465B2 (en) | 2015-07-20 | 2019-11-05 | Kofax, Inc. | Range and/or polarity-based thresholding for improved data extraction |
| US10444006B2 (en) * | 2015-08-19 | 2019-10-15 | Faro Technologies, Inc. | Three-dimensional imager |
| US10455216B2 (en) | 2015-08-19 | 2019-10-22 | Faro Technologies, Inc. | Three-dimensional imager |
| JP6568223B2 (ja) | 2015-09-01 | 2019-08-28 | Necプラットフォームズ株式会社 | 投射装置、投射方法および投射プログラム |
| CN106990663A (zh) * | 2017-06-05 | 2017-07-28 | 电子科技大学中山学院 | 一种便携式可折叠三维户型投影装置 |
| JP7148229B2 (ja) * | 2017-07-31 | 2022-10-05 | 株式会社トプコン | 三次元点群データの縦断面図作成方法,そのための測量データ処理装置,および測量システム |
| US10803350B2 (en) | 2017-11-30 | 2020-10-13 | Kofax, Inc. | Object detection and image cropping using a multi-detector approach |
| KR102640871B1 (ko) | 2018-10-30 | 2024-02-27 | 삼성전자주식회사 | 증강 현실을 이용한 영상 데이터를 제공하는 전자 장치 및 그 제어 방법 |
| US11614835B2 (en) * | 2019-02-14 | 2023-03-28 | Sony Group Corporation | Information processing device that projects drawing information according to ratio of distances, information processing method, and recording medium |
| CN110677634B (zh) | 2019-11-27 | 2021-06-29 | 成都极米科技股份有限公司 | 投影仪的梯形校正方法、装置、系统及可读存储介质 |
| CN111669557B (zh) * | 2020-06-24 | 2022-05-13 | 歌尔光学科技有限公司 | 投影图像校正方法和校正装置 |
| EP4283986A4 (en) * | 2021-06-01 | 2024-08-07 | Samsung Electronics Co Ltd | ELECTRONIC DEVICE AND CONTROL METHOD THEREFOR |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004069996A (ja) * | 2002-08-06 | 2004-03-04 | Seiko Epson Corp | プロジェクタシステム並びに情報処理装置及びプロジェクタ |
| JP2004088169A (ja) * | 2002-08-22 | 2004-03-18 | Nisca Corp | 画像表示装置 |
| JP2005092820A (ja) * | 2003-09-19 | 2005-04-07 | Sony Corp | 環境認識装置及び方法、経路計画装置及び方法、並びにロボット装置 |
| JP2006197443A (ja) * | 2005-01-17 | 2006-07-27 | Seiko Epson Corp | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP2006304100A (ja) * | 2005-04-22 | 2006-11-02 | Olympus Corp | マルチプロジェクションシステム及び監視方法 |
| JP2007094036A (ja) * | 2005-09-29 | 2007-04-12 | Casio Comput Co Ltd | 投影装置、投影方法及びプログラム |
| JP2010050540A (ja) * | 2008-08-19 | 2010-03-04 | Seiko Epson Corp | 投写型表示装置および表示方法 |
| JP2011133273A (ja) * | 2009-12-22 | 2011-07-07 | Canon Inc | 推定装置及びその制御方法、プログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3880582B2 (ja) | 2004-02-13 | 2007-02-14 | Necビューテクノロジー株式会社 | 複数のカメラを備えたプロジェクタ |
| JP5994301B2 (ja) | 2011-06-20 | 2016-09-21 | 株式会社リコー | 画像処理装置、情報処理装置、方法、プログラムおよび記録媒体 |
| JP2013033206A (ja) | 2011-07-06 | 2013-02-14 | Ricoh Co Ltd | 投影型表示装置、情報処理装置、投影型表示システム、およびプログラム |
-
2011
- 2011-08-18 JP JP2011178809A patent/JP5961945B2/ja active Active
-
2012
- 2012-08-09 EP EP12823869.8A patent/EP2745504B1/en active Active
- 2012-08-09 WO PCT/JP2012/070784 patent/WO2013024882A1/en active Application Filing
- 2012-08-09 AU AU2012295789A patent/AU2012295789B2/en active Active
- 2012-08-09 US US14/238,689 patent/US9759548B2/en active Active
- 2012-08-09 CN CN201280039743.9A patent/CN103765870B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004069996A (ja) * | 2002-08-06 | 2004-03-04 | Seiko Epson Corp | プロジェクタシステム並びに情報処理装置及びプロジェクタ |
| JP2004088169A (ja) * | 2002-08-22 | 2004-03-18 | Nisca Corp | 画像表示装置 |
| JP2005092820A (ja) * | 2003-09-19 | 2005-04-07 | Sony Corp | 環境認識装置及び方法、経路計画装置及び方法、並びにロボット装置 |
| JP2006197443A (ja) * | 2005-01-17 | 2006-07-27 | Seiko Epson Corp | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP2006304100A (ja) * | 2005-04-22 | 2006-11-02 | Olympus Corp | マルチプロジェクションシステム及び監視方法 |
| JP2007094036A (ja) * | 2005-09-29 | 2007-04-12 | Casio Comput Co Ltd | 投影装置、投影方法及びプログラム |
| JP2010050540A (ja) * | 2008-08-19 | 2010-03-04 | Seiko Epson Corp | 投写型表示装置および表示方法 |
| JP2011133273A (ja) * | 2009-12-22 | 2011-07-07 | Canon Inc | 推定装置及びその制御方法、プログラム |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014179698A (ja) * | 2013-03-13 | 2014-09-25 | Ricoh Co Ltd | プロジェクタ及びプロジェクタの制御方法、並びに、その制御方法のプログラム及びそのプログラムを記録した記録媒体 |
| JP2014187515A (ja) * | 2013-03-22 | 2014-10-02 | Seiko Epson Corp | プロジェクター及びプロジェクターの制御方法 |
| JP2015057876A (ja) * | 2013-08-13 | 2015-03-26 | 株式会社リコー | 画像処理装置、画像処理システム、画像処理方法、及びプログラム |
| US9787960B2 (en) | 2013-08-13 | 2017-10-10 | Ricoh Company, Limited | Image processing apparatus, image processing system, image processing method, and computer program |
| EP2876876A3 (en) * | 2013-11-22 | 2015-07-22 | Ricoh Company, Ltd. | Image projection apparatus, image projection method, and computer-readable storage medium |
| US9621820B2 (en) | 2013-11-22 | 2017-04-11 | Ricoh Company, Limited | Image projection apparatus, image projection method, and computer-readable storage medium |
| EP2876876A2 (en) | 2013-11-22 | 2015-05-27 | Ricoh Company, Ltd. | Image projection apparatus, image projection method, and computer-readable storage medium |
| JP2015139087A (ja) * | 2014-01-22 | 2015-07-30 | 株式会社リコー | 投影装置 |
| JP2015173431A (ja) * | 2014-02-18 | 2015-10-01 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 投影システムおよび半導体集積回路 |
| US9560327B2 (en) | 2014-02-19 | 2017-01-31 | Ricoh Company, Limited | Projection system and projection method |
| JP2016014712A (ja) * | 2014-07-01 | 2016-01-28 | キヤノン株式会社 | シェーディング補正値算出装置およびシェーディング補正値算出方法 |
| JP2016167268A (ja) * | 2015-03-06 | 2016-09-15 | 国立大学法人 筑波大学 | ジェスチャモデリング装置、ジェスチャモデリング方法、ジェスチャモデリングシステム用のプログラム、およびジェスチャモデリングシステム |
| JP2017073705A (ja) * | 2015-10-08 | 2017-04-13 | 富士通株式会社 | 投影装置、映像投影方法及び映像投影用コンピュータプログラム |
| WO2020013021A1 (ja) * | 2018-07-13 | 2020-01-16 | 株式会社ニコン | 検出装置、処理装置、検出方法、及び処理プログラム |
| JPWO2020013021A1 (ja) * | 2018-07-13 | 2021-08-02 | 株式会社ニコン | 検出装置、処理装置、検出方法、及び処理プログラム |
| JP7200994B2 (ja) | 2018-07-13 | 2023-01-10 | 株式会社ニコン | 処理装置、検出装置、処理方法、及び処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2745504B1 (en) | 2022-10-05 |
| AU2012295789A1 (en) | 2014-02-13 |
| CN103765870A (zh) | 2014-04-30 |
| EP2745504A4 (en) | 2014-09-10 |
| EP2745504A1 (en) | 2014-06-25 |
| WO2013024882A1 (en) | 2013-02-21 |
| CN103765870B (zh) | 2017-04-12 |
| US20140204204A1 (en) | 2014-07-24 |
| JP5961945B2 (ja) | 2016-08-03 |
| US9759548B2 (en) | 2017-09-12 |
| AU2012295789B2 (en) | 2015-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5961945B2 (ja) | 画像処理装置、その画像処理装置を有するプロジェクタ及びプロジェクタシステム、並びに、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 | |
| JP5834615B2 (ja) | プロジェクタ、その制御方法、そのプログラム、及び、そのプログラムを記録した記録媒体 | |
| JP6394081B2 (ja) | 画像処理装置、画像処理システム、画像処理方法、及びプログラム | |
| JP4911230B2 (ja) | 撮影装置、並びに制御プログラム及び制御方法 | |
| US8441518B2 (en) | Imaging apparatus, imaging control method, and recording medium | |
| JP5849522B2 (ja) | 画像処理装置、プロジェクタ、プロジェクタシステム、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 | |
| JP5672112B2 (ja) | ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム | |
| JP2012088114A (ja) | 光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム | |
| CN107808398B (zh) | 摄像头参数算出装置以及算出方法、程序、记录介质 | |
| US10205928B2 (en) | Image processing apparatus that estimates distance information, method of controlling the same, and storage medium | |
| JP2011049733A (ja) | カメラキャリブレーション装置および映像歪み補正装置 | |
| JP2016217833A (ja) | 画像処理システム及び画像処理方法 | |
| JP2016085380A (ja) | 制御装置、制御方法、及び、プログラム | |
| JP2011155412A (ja) | 投影システムおよび投影システムにおける歪み修正方法 | |
| JP6088864B2 (ja) | キャリブレーションシステム、およびキャリブレーション方法 | |
| JP5727969B2 (ja) | 位置推定装置、方法、及びプログラム | |
| JP2007033087A (ja) | キャリブレーション装置及び方法 | |
| KR101996226B1 (ko) | 피사체의 3차원 위치 측정 장치 및 그 방법 | |
| JP2008224323A (ja) | ステレオ写真計測装置、ステレオ写真計測方法及びステレオ写真計測用プログラム | |
| KR20140068444A (ko) | 다층 평면 물체 영상을 이용하여 카메라를 보정하기 위한 장치 및 그 방법 | |
| JP2013165344A (ja) | 画像処理装置及び画像処理方法 | |
| KR20150125766A (ko) | 광각 카메라 영상의 특징점 검출 방법 | |
| JP2009282742A (ja) | 人物検出装置及び人物検出方法並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160613 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5961945 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |