JP2012192499A - パラレルリンクロボット - Google Patents
パラレルリンクロボット Download PDFInfo
- Publication number
- JP2012192499A JP2012192499A JP2011058994A JP2011058994A JP2012192499A JP 2012192499 A JP2012192499 A JP 2012192499A JP 2011058994 A JP2011058994 A JP 2011058994A JP 2011058994 A JP2011058994 A JP 2011058994A JP 2012192499 A JP2012192499 A JP 2012192499A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- output member
- link
- shaft
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 69
- 230000005540 biological transmission Effects 0.000 claims description 10
- 239000000428 dust Substances 0.000 description 3
- 238000003754 machining Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images







Landscapes
- Manipulator (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058994A JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058994A JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012192499A true JP2012192499A (ja) | 2012-10-11 |
| JP2012192499A5 JP2012192499A5 (enExample) | 2014-05-01 |
Family
ID=47084905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011058994A Pending JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012192499A (enExample) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103286773A (zh) * | 2013-07-01 | 2013-09-11 | 安徽工业大学 | 一种三自由度并联机器人机构 |
| KR101859297B1 (ko) * | 2016-12-07 | 2018-06-27 | 고려대학교 세종산학협력단 | 4 자유도 메커니즘 |
| WO2022176967A1 (ja) * | 2021-02-17 | 2022-08-25 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| WO2023085338A1 (ja) * | 2021-11-09 | 2023-05-19 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01306192A (ja) * | 1988-05-31 | 1989-12-11 | Pentel Kk | ロボットのアーム駆動装置 |
| JPH06143165A (ja) * | 1992-10-30 | 1994-05-24 | Japan Airlines Co Ltd | 作業用ロボット |
| WO1998030366A1 (en) * | 1997-01-14 | 1998-07-16 | Asea Brown Boveri Ab | A device for relative displacement of two elements |
| WO1999058301A1 (en) * | 1998-04-29 | 1999-11-18 | Abb Ab | A device for relative movement of two elements |
| US6095011A (en) * | 1996-03-14 | 2000-08-01 | Abb Ab | Device for relative movement of two elements |
| US20010002098A1 (en) * | 1997-11-03 | 2001-05-31 | Douglas Haanpaa | Haptic pointing devices |
| WO2003078111A1 (en) * | 2002-03-18 | 2003-09-25 | Abb Ab | Manipulator and method involving a manipulator for movement of an object, comprising at least two driving parallel kinematic connecting chains |
| US20040013509A1 (en) * | 1999-08-05 | 2004-01-22 | Roy Shambhu Nath | Parallel kinematics mechanism with a concentric spherical joint |
| JP2004508950A (ja) * | 2000-09-11 | 2004-03-25 | エービービー エービー | 空間で物体を動かすための3本以上のアームを伴うマニピュレータ |
| JP2005516784A (ja) * | 2002-02-06 | 2005-06-09 | アーベーベー・アーベー | 産業用ロボット |
| US20060245894A1 (en) * | 2005-03-21 | 2006-11-02 | Michael Merz | Parallel robot |
| WO2012031954A1 (en) * | 2010-09-10 | 2012-03-15 | Abb Research Ltd | An industrial robot including a parallel kinematic manipulator |
-
2011
- 2011-03-17 JP JP2011058994A patent/JP2012192499A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01306192A (ja) * | 1988-05-31 | 1989-12-11 | Pentel Kk | ロボットのアーム駆動装置 |
| JPH06143165A (ja) * | 1992-10-30 | 1994-05-24 | Japan Airlines Co Ltd | 作業用ロボット |
| US6095011A (en) * | 1996-03-14 | 2000-08-01 | Abb Ab | Device for relative movement of two elements |
| WO1998030366A1 (en) * | 1997-01-14 | 1998-07-16 | Asea Brown Boveri Ab | A device for relative displacement of two elements |
| US20010002098A1 (en) * | 1997-11-03 | 2001-05-31 | Douglas Haanpaa | Haptic pointing devices |
| WO1999058301A1 (en) * | 1998-04-29 | 1999-11-18 | Abb Ab | A device for relative movement of two elements |
| US20040013509A1 (en) * | 1999-08-05 | 2004-01-22 | Roy Shambhu Nath | Parallel kinematics mechanism with a concentric spherical joint |
| JP2004508950A (ja) * | 2000-09-11 | 2004-03-25 | エービービー エービー | 空間で物体を動かすための3本以上のアームを伴うマニピュレータ |
| JP2005516784A (ja) * | 2002-02-06 | 2005-06-09 | アーベーベー・アーベー | 産業用ロボット |
| WO2003078111A1 (en) * | 2002-03-18 | 2003-09-25 | Abb Ab | Manipulator and method involving a manipulator for movement of an object, comprising at least two driving parallel kinematic connecting chains |
| US20060245894A1 (en) * | 2005-03-21 | 2006-11-02 | Michael Merz | Parallel robot |
| WO2012031954A1 (en) * | 2010-09-10 | 2012-03-15 | Abb Research Ltd | An industrial robot including a parallel kinematic manipulator |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103286773A (zh) * | 2013-07-01 | 2013-09-11 | 安徽工业大学 | 一种三自由度并联机器人机构 |
| KR101859297B1 (ko) * | 2016-12-07 | 2018-06-27 | 고려대학교 세종산학협력단 | 4 자유도 메커니즘 |
| WO2022176967A1 (ja) * | 2021-02-17 | 2022-08-25 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| JPWO2022176967A1 (enExample) * | 2021-02-17 | 2022-08-25 | ||
| JP7305885B2 (ja) | 2021-02-17 | 2023-07-10 | 望月 貴里子 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| JP7383213B2 (ja) | 2021-02-17 | 2023-11-20 | 玲於奈 望月 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| WO2023085338A1 (ja) * | 2021-11-09 | 2023-05-19 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105307824B (zh) | 具有设置在悬臂上的驱动器布局的工业机器人 | |
| JP6914568B2 (ja) | 産業用ロボットアーム | |
| US8893578B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| US20130142608A1 (en) | Parallel mechanism | |
| JP4125960B2 (ja) | 産業用ロボット | |
| JP2010184328A (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット | |
| JP2010115776A (ja) | 多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット | |
| WO2018105584A1 (ja) | 産業用ロボット | |
| CN121315920A (zh) | 作业装置和双臂型作业装置 | |
| JP6582491B2 (ja) | ロボット | |
| JP6677970B2 (ja) | 産業用ロボット | |
| JP2004291166A (ja) | 四自由度パラレルロボット | |
| JP2014168825A (ja) | 二次元移動閉リンク構造 | |
| JP6110620B2 (ja) | パラレルリンクロボット | |
| CN111819038A (zh) | 采用平行连杆机构的作业设备及其控制方法 | |
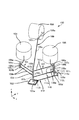
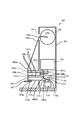
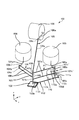
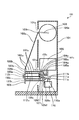
| JP2012192499A (ja) | パラレルリンクロボット | |
| CN114845840A (zh) | 用于以受控定向定位工具的敏捷机器人手臂 | |
| JP2014039977A (ja) | パラレルロボット | |
| JP2018069354A (ja) | リンク式多関節ロボット | |
| JP2012192500A (ja) | パラレルリンクロボット | |
| JP5833869B2 (ja) | デルタ型パラレルロボット | |
| JPH08243972A (ja) | 多自由度関節を備えた産業用ロボット | |
| JP6043561B2 (ja) | パラレルリンクロボット | |
| JP2020192625A (ja) | パラレルリンクロボット | |
| JP5866154B2 (ja) | パラレルリンクロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140317 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150623 |