JP5866154B2 - パラレルリンクロボット - Google Patents
パラレルリンクロボット Download PDFInfo
- Publication number
- JP5866154B2 JP5866154B2 JP2011150319A JP2011150319A JP5866154B2 JP 5866154 B2 JP5866154 B2 JP 5866154B2 JP 2011150319 A JP2011150319 A JP 2011150319A JP 2011150319 A JP2011150319 A JP 2011150319A JP 5866154 B2 JP5866154 B2 JP 5866154B2
- Authority
- JP
- Japan
- Prior art keywords
- output member
- vertical direction
- moving element
- axis
- rail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 83
- 230000033001 locomotion Effects 0.000 claims description 41
- 230000005540 biological transmission Effects 0.000 description 6
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052698 phosphorus Inorganic materials 0.000 description 1
- 239000011574 phosphorus Substances 0.000 description 1
Images








Description
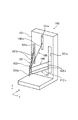
本発明の第1の実施形態について、図1〜図4を用いて説明する。図1及び図2に示すように、パラレルリンクロボット100は、ケース101と、出力部材103と、複数のリニアアクチュエータ104、105、108、110と、複数のリンク機構106、107、109、112と、を有する。なお、104は第1リニアアクチュエータ、105は第2リニアアクチュエータ、108は第3リニアアクチュエータ、110は第4リニアアクチュエータである。また、106は第1リンク機構、107は第2リンク機構、109は第3リンク機構、112は第4リンク機構である。
ケース101内には、第1リニアアクチュエータ104、第2リニアアクチュエータ105、第3リニアアクチュエータ108、第4リニアアクチュエータ110を、それぞれの可動部が出力部材側に突出しないように収納する。ケース101はベース部材を兼ねており、複数のリニアアクチュエータ104、105、108、110が、ケース101を構成する略鉛直方向に配設(立設)された支持壁101bのそれぞれの所定の位置に直接又は取付部材などを介して固定されている。
出力部材103は、ワークの移動や加工などを行うフィンガーやドリルなどの工具を取り付けるものである。このような出力部材103は、所定のz軸方向(鉛直方向)に配設され、例えば、その先端部(下端部)に工具を結合する。後述するように、出力部材103は、z軸(鉛直方向に沿った軸)回りの回転自在である。言い換えれば、出力部材103は、回転軸がz軸と略(実質的に)平行である。本実施形態では、z軸方向を鉛直方向としている。
第1リニアアクチュエータ104及び第2リニアアクチュエータ105は、それぞれが出力部材103をxyz空間内(三次元空間内)で移動させるための駆動源となる直動型のアクチュエータの一例である。これら第1リニアアクチュエータ104及び第2リニアアクチュエータ105は、それぞれレール(固定子)104A(第1レール)、105A(第2レール)をz軸方向(鉛直方向)に配置している。レール104A、105Aは、それぞれケース101の支持壁101bの鉛直方向中間部ないし下端寄りに固定されている。即ち、レール104Aとレール105Aとは、支持壁101bのうち鉛直方向下端部側において、第1移動子104a及び第2移動子105aの移動方向と直交する方向に間隔をあけて配置されている。そして、第1リニアアクチュエータ104のレール104Aに第1移動子104aを、第2リニアアクチュエータ105のレール105Aに第2移動子105aを、それぞれレールに沿って移動自在に配置している。
第3リニアアクチュエータ108は、出力部材103をxyz空間内の概ねz軸方向に移動させるための駆動源となる直動型アクチュエータの一例である。この第3リニアアクチュエータ108も、第1リニアアクチュエータ104及び第2リニアアクチュエータ105と同様に、レール(固定子)108A(第3レール)をz軸方向(鉛直方向)に配置している。レール108Aは、ケース101の支持壁101bの鉛直方向上端寄りで、水平方向に関してレール104Aとレール105Aとの間に固定されている。即ち、レール108Aは、レール104Aとレール105Aとで挟まれた部分よりも支持壁101bの鉛直方向上端部側に配置されている。また、レール108Aは、レール104A及びレール105Aの長さよりも短い長さを有する。そして、第3リニアアクチュエータ108のレール108Aに第3移動子108aをレールに沿って移動自在に配置している。
第4リニアアクチュエータ110は、出力部材103をz軸回り(鉛直軸回り)に回動させるための駆動源となる直動型アクチュエータの一例である。この第4リニアアクチュエータ110も、第1リニアアクチュエータ104及び第2リニアアクチュエータ105と同様に、レール(固定子)110Aをz軸方向(鉛直方向)に配置している。レール110Aは、ケース101の支持壁101bの鉛直方向中間部ないし下端寄りで、水平方向に関してレール104Aとレール105Aとの間に固定されている。図示の例の場合、第1アクチュエータ104のレール104Aに隣接した位置に配置している。そして、第4リニアアクチュエータ110のレール110Aに第4移動子110aをレールに沿って移動自在に配置している。また、レール110Aは、鉛直方向の長さをレール104Aよりも長くして、第4移動子110aの移動範囲を第1移動子104aの移動範囲よりも大きくしている。本実施形態では、第4移動子110aは、第1移動子104aと、第2移動子105aと、第3移動子108aとともにz軸に平行な共通の平面(上述の所定の平面)内又はその近傍を移動するように配置されている。第4移動子110aの移動量も、制御部Cにより制御される。
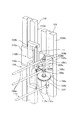
第4移動子110aには、図3に示す様に、レール110Aと反対側に、連動機構110Bが配置されている。この連動機構110Bは、第1移動子104aと第4移動子110aとの間に設けられ、これら両移動子104a、110aの相対移動に連動して中間アーム104fを回転させる。このために連動機構110Bは、一対の支持部材110b、110cと、ワイヤ111と、2個の補助プーリ104cと、プーリ104eとを有する。
第1リンク機構106及び第2リンク機構107は、出力部材103と第1移動子104aとの間、及び、出力部材103と第2移動子105aとの間に、それぞれ設けられている。そして、後述するように出力部材103の回転軸をz軸に略平行に保つように保持する機能を有するとともに、第1リニアアクチュエータ104及び第2リニアアクチュエータ105の駆動により出力部材103を移動する機能を有している。
上述のように、第1リニアアクチュエータ104と出力部材103との間、及び、第2リニアアクチュエータ105と出力部材103との間に、それぞれ平行リンク機構を設けている。そして、これら2個のリニアアクチュエータにより出力部材103をz軸に交差する方向(即ち、概ね水平方向)に移動可能としている。即ち、制御部Cが第3移動子108aの位置を固定したまま、第1移動子104a及び第2移動子105aを、z軸方向にそれぞれ任意の量移動させる。これにより出力部材103のz軸方向の位置は概ね変化しない一方で、第1軸104b及び第2軸105bと出力部材103とのz軸に交差する方向の距離が変化して、出力部材103が概ね水平方向に移動させられる。
第3リンク機構109は、出力部材103と第3移動子108aとの間に設けられ、第3リニアアクチュエータ108の駆動により出力部材103を概ねz軸方向に移動可能としている。このような第3リンク機構109は、第3リンク部材である第3リンクバー109aと、出力部材103とにより構成される。
制御部Cにより第3リニアアクチュエータ108を駆動すると、第3移動子108aがz軸方向に沿って移動し、第3軸108bの先端に第3リンクバー109aを介して接続された出力部材103が概ね鉛直方向に移動する。厳密には、第1リニアアクチュエータ104及び第2リニアアクチュエータ105の移動子104a、105aを固定のまま、第3リニアアクチュエータ108のみ駆動すると出力部材103は仮想的な円弧上を移動する。
上述したように、第1軸104bの下端部には、軸受104dを介してプーリ104eを回転自在に支持している。また、このプーリ104eと共に回転する回転部材である中間アーム104fを配置している。中間アーム104fは、回転軸線から離間した位置に第4駆動側ジョイント部112cを連結可能である。これらプーリ104e及び中間アーム104fは、上述したように、第1移動子104aと第4移動子110aとの相対移動により連動機構110Bを介して、第1軸104bを中心として回転する。そして、中間アーム104fの回転は、第4リンク機構112を介して出力部材103に伝達される。
上述のように、中間アーム104fと出力アーム103aとの間に第4リンク機構を設けているため、出力アーム103aはz軸を回転中心として中間アーム104fの回転に追従して回転する。この結果、出力アーム103aの回転角度は中間アーム104fの回転角度に一致する。したがって、制御部Cにより第1リニアアクチュエータ104の第1移動子104aと第4リニアアクチュエータ110の第4移動子110aとの相対位置を制御することで出力部材103の回転を制御可能となっている。
上述したように、第1移動子104aと、第2移動子105aと、第3移動子108aと、第4移動子110aとは、z軸に平行な共通の平面に概ね沿って移動するように配置されている。また、出力部材103は、これら各移動子104a、105a、108a、110aに対してz軸に平行な共通の平面から外れた位置に位置決めされる。
このように構成される本実施形態の場合、出力部材103を、x軸、y軸方向に関して(z軸方向の上方から見て)任意の位置においてz軸方向の任意の方向(上方向又は下方向)に任意の量移動させる場合に、第1、第2、第3の各リニアアクチュエータ104、105、108を次のように駆動制御する。即ち、制御部Cにより、第1移動子104a、第2移動子105a、第3移動子108aを、それぞれ任意の量と略同じ量だけ上方向(又は下方向)に同時に移動させる。言い換えれば、制御部Cは、鉛直方向における全ての移動子104a、105a、108aの移動を実質的に同等として三次元空間内の出力部材103の鉛直方向のみの位置を決定するように制御する。例えば、出力部材103を水平方向の位置はそのままに鉛直方向上方にh(mm)移動させる場合、第1移動子104a、第2移動子105a、第3移動子108aを、それぞれ鉛直方向上方に略h(mm)移動させる。なお、この際、第4移動子110aの移動量をhよりも多く又は少なくなるように制御して、第1移動子104aとの相対位置を変化させれば、出力部材103の回転角度が変化する。
本発明の第2の実施形態について、図5及び図6を用いて説明する。本実施形態は、上述の第1の実施形態に対し、中間アーム104fを回転させる機構を変更している。即ち、本実施形態では、第1移動子104aと第4移動子110aとの相対移動に連動して中間アーム104fを回転させる連動機構110Cをリンク機構により構成している。
本発明の第3の実施形態について、図7及び図8を用いて説明する。本実施形態は、上述の第1の実施形態に対し、出力部材103にクランク部を設け、中間アーム104fと出力部材103との間の回転伝達の構造を変更している。また、第3リンクバー109aの出力部材103側の第3出力側ジョイント部109bの位置を、出力部材103の上端部としている。
101 ケース
103 出力部材
103a 出力アーム
104 第1リニアアクチュエータ
104a 第1移動子
104b 第1軸
104f 中間アーム
105 第2リニアアクチュエータ
105a 第2移動子
105b 第2軸
106 第1リンク機構
107 第2リンク機構
108 第3リニアアクチュエータ
108a 第3移動子
108b 第3軸
109 第3リンク機構
110 第4リニアアクチュエータ
110a 第4移動子
110B、110C 連動機構
112 第4リンク機構
116 クランク部(出力アーム)
C 制御部
Claims (6)
- 鉛直方向に立設された支持壁を有するベース部材と、
工具が取り付けられる出力部材と、
前記ベース部材の前記支持壁に鉛直方向に沿って取り付けられた第1レールと、前記第1レールに沿って鉛直方向に移動する第1移動子と、を有する第1リニアアクチュエータと、
前記ベース部材の前記支持壁に鉛直方向に沿って取り付けられた第2レールと、前記第2レールに沿って鉛直方向に移動する第2移動子と、を有する第2リニアアクチュエータと、
前記ベース部材の前記支持壁に鉛直方向に沿って取り付けられた第3レールと、前記第3レールに沿って鉛直方向に移動する第3移動子と、を有する第3リニアアクチュエータと、
前記出力部材と、前記第1移動子、前記第2移動子、前記第3移動子とをそれぞれ連結する第1リンク機構、第2リンク機構、第3リンク機構と、
前記ベース部材上の三次元空間内で前記出力部材を位置決めするために、前記第1移動子、前記第2移動子、前記第3移動子のそれぞれの移動を制御する制御部と、を備え、
前記第1レールと前記第2レールとは、前記支持壁のうち鉛直方向下端部側において前記第1移動子及び前記第2移動子の移動方向と直交する方向に間隔をあけて配置され、
前記第3レールは、前記第1レール及び前記第2レールの長さよりも短い長さを有し、且つ前記第1レールと前記第2レールとで挟まれた部分よりも前記支持壁の鉛直方向上端部側に配置され、
前記制御部は、鉛直方向における全ての移動子の移動を実質的に同等として前記三次元空間内の前記出力部材の鉛直方向のみの位置を決定するように制御する、
ことを特徴とするパラレルリンクロボット。 - 前記制御部により移動が制御され、前記第1リニアアクチュエータと実質的に平行に移動する第4移動子を有する第4リニアアクチュエータと、
前記第1移動子に鉛直方向に沿った軸回りの回転自在に支持され、この回転軸線から離間した位置にジョイント部を連結可能な回転部材と、
前記出力部材に固定されるか又は一体に形成され、該出力部材の回転軸線から離間した位置に他のジョイント部を連結可能な出力延長部材と、
前記第1移動子と前記第4移動子との間に設けられ、これら両移動子の相対移動に連動して前記回転部材を回転させる連動機構と、
前記ジョイント部と前記他のジョイント部と他のリンク部材を有し、前記回転部材と前記出力延長部材とを連結し、前記回転部材の回転を前記出力延長部材を介して前記出力部材に伝達する第4リンク機構と、を有し、
前記出力部材は、前記第1リンク機構、前記第2リンク機構、前記第3リンク機構に対して鉛直方向に沿った軸回りの回転自在に連結され、
前記制御部は、前記出力部材の回転角度を所定の角度に維持しつつ鉛直方向における全ての移動子の移動を実質的に同等として前記三次元空間内の前記出力部材の鉛直方向のみの位置を決定するように制御する、
ことを特徴とする、請求項1に記載のパラレルリンクロボット。 - 前記第1リンク機構、前記第2リンク機構、前記第3リンク機構と前記出力部材とのそれぞれの連結部が、鉛直方向に沿った軸と実質的に平行な同一軸上に配置されている、
ことを特徴とする、請求項1又は2に記載のパラレルリンクロボット。 - 前記出力部材は、前記第1リンク機構、前記第2リンク機構、前記第3リンク機構に対して鉛直方向に沿った軸回りの回転自在に連結され、
前記第1リンク機構、前記第2リンク機構、前記第3リンク機構と前記出力部材とのそれぞれの連結部が、前記出力部材の回転軸上に配置されている、
ことを特徴とする、請求項3に記載のパラレルリンクロボット。 - 前記第1移動子と、前記第2移動子は、鉛直方向に沿った軸に平行な所定の平面内を移動するように配置され、
前記第3移動子は、前記所定の平面内又はその近傍を移動するように配置され、
前記出力部材は、前記所定の平面及びその近傍から外れた位置に位置決めされる、
ことを特徴とする、請求項1ないし4のうちの何れか1項に記載のパラレルリンクロボット。 - 前記第1移動子と、前記第2移動子は、鉛直方向に沿った軸に平行な平面内を移動するように配置され、
前記第3移動子は、鉛直方向に沿った軸に平行な平面内を移動するように配置され、
前記第4移動子は、鉛直方向に沿った軸に平行な平面内を移動するように配置され、
前記出力部材は、鉛直方向に沿った軸に平行な平面から外れた位置に位置決めされる、
ことを特徴とする、請求項2に記載のパラレルリンクロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011150319A JP5866154B2 (ja) | 2011-07-06 | 2011-07-06 | パラレルリンクロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011150319A JP5866154B2 (ja) | 2011-07-06 | 2011-07-06 | パラレルリンクロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013013990A JP2013013990A (ja) | 2013-01-24 |
| JP2013013990A5 JP2013013990A5 (ja) | 2015-03-26 |
| JP5866154B2 true JP5866154B2 (ja) | 2016-02-17 |
Family
ID=47687177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011150319A Active JP5866154B2 (ja) | 2011-07-06 | 2011-07-06 | パラレルリンクロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5866154B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5963968B1 (ja) * | 2015-01-21 | 2016-08-03 | 三菱電機株式会社 | 位置決め装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2588418B2 (ja) * | 1988-03-31 | 1997-03-05 | 新明和工業株式会社 | 3次元マニピュレータ |
| EP0868255B1 (de) * | 1995-12-20 | 1999-09-08 | Alexander Konrad Wiegand | Vorrichtung zur räumlichen gesteuerten bewegung eines körpers in drei bis sechs freiheitsgraden |
| JP3806273B2 (ja) * | 1999-09-17 | 2006-08-09 | 株式会社ジェイテクト | 四自由度パラレルロボット |
| SE517356C2 (sv) * | 2000-09-11 | 2002-05-28 | Abb Ab | Manipulator innefattande minst tre armar för förflyttning av en kropp i rymden |
| SE0003912D0 (sv) * | 2000-10-24 | 2000-10-24 | Abb Ab | Industrirobot |
| AU2002226827A1 (en) * | 2002-01-16 | 2003-07-30 | Abb Ab | Industrial robot |
| ES2262428B1 (es) * | 2005-04-04 | 2007-11-16 | Fundacion Fatronik | Robot paralelo de cuatro grados de libertad con rotacion ilimitada. |
-
2011
- 2011-07-06 JP JP2011150319A patent/JP5866154B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013013990A (ja) | 2013-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102010612B1 (ko) | 패럴렐 링크 로봇 | |
| US8893578B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| JP4598864B2 (ja) | パラレルロボット | |
| JP6450401B2 (ja) | 双腕ロボット | |
| CN107186699B (zh) | 一种具有平面两移动自由度的并联机构 | |
| JP5546826B2 (ja) | 多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット | |
| US20130142608A1 (en) | Parallel mechanism | |
| JP6582491B2 (ja) | ロボット | |
| JP6914568B2 (ja) | 産業用ロボットアーム | |
| JP2010184328A (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット | |
| EP3162514B1 (en) | Parallel-type micro-robot and surgical robot system having same | |
| JP2014124742A (ja) | アーム駆動装置 | |
| US10189156B2 (en) | Industrial robot | |
| US20200147785A1 (en) | Parallel link robot | |
| JP2014039977A (ja) | パラレルロボット | |
| JP5866154B2 (ja) | パラレルリンクロボット | |
| JP2012192499A (ja) | パラレルリンクロボット | |
| WO2019163997A1 (ja) | パラレルリンク機構を用いた作業装置およびその制御方法 | |
| JP2013132711A (ja) | パラレルリンクロボット | |
| JP2018069354A (ja) | リンク式多関節ロボット | |
| JP2012240180A (ja) | 双腕ロボット | |
| JP2012192500A (ja) | パラレルリンクロボット | |
| WO2019150812A1 (ja) | 駆動装置並びにロボット装置 | |
| KR100774887B1 (ko) | 매니퓰레이터의 삼축 관절장치 | |
| JP2013013991A (ja) | パラレルリンクロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5866154 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |