JP2012192499A - パラレルリンクロボット - Google Patents
パラレルリンクロボット Download PDFInfo
- Publication number
- JP2012192499A JP2012192499A JP2011058994A JP2011058994A JP2012192499A JP 2012192499 A JP2012192499 A JP 2012192499A JP 2011058994 A JP2011058994 A JP 2011058994A JP 2011058994 A JP2011058994 A JP 2011058994A JP 2012192499 A JP2012192499 A JP 2012192499A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- output member
- link
- shaft
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
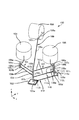
【解決手段】第1、第2モータ104、105により出力部材102を水平方向に移動させる。第3モータ108により出力部材102を鉛直方向に移動させる。第4モータ110により出力部材102を鉛直軸回りに回動させる。出力部材102と第1、第2、第3、第4モータ104、105、108、110との間にそれぞれリンク機構106、107、109、112を設ける。そして、出力部材102を鉛直方向に対して傾斜させることなく、鉛直方向及び水平方向に移動可能、且つ、出力部材102を鉛直軸回りの回転可能とする。更に、第1、第2、第3、第4モータ104、105、108、110を、出力部材102の移動領域に対して水平方向に外れた位置に配置する。
【選択図】図1
Description
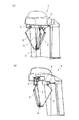
本発明の第1の実施形態について、図1〜図4を用いて説明する。図1及び図2に示すように、パラレルリンクロボット100は、ケース101と、出力部材102と、複数のモータ104、105、108、110と、複数のリンク機構106、107、109、112と、を有する。第1モータ104は第1アクチュエータに、第2モータ105は第2アクチュエータに、第3モータ108は第3アクチュエータに、第4モータ110は第4アクチュエータに、それぞれ相当する。また、106は第1リンク機構に、107は第2リンク機構に、109は第3リンク機構に、112は第4リンク機構に、それぞれ相当する。
ケース101内には、第1モータ104、第2モータ105、第3モータ108、第4モータ110を、それぞれの可動部が出力部材側に突出しないように収納する。ケース101はベース部材を兼ねており、複数のモータ104、105、108、110が、ケース101内のそれぞれの所定の位置に直接又は取付部材などを介して固定されている。
出力部材102は、ワークの移動や加工などを行う工具を取り付けるものである。このような出力部材102は、z軸方向に略平行に配置された出力軸103の先端部(下端部)に結合されている。後述するように、出力部材102は、出力軸103を回転軸として回転可能である。言い換えれば、出力部材102は、回転軸がz軸と略平行である。本実施形態では、z軸方向を鉛直方向としている。
第1モータ104及び第2モータ105は、それぞれが出力部材102を概ねxy平面に沿って(水平方向に)移動させるための駆動源となる回転型アクチュエータの一例である。なお、厳密に言えば第3モータ108を停止している場合は、第1モータ104及び第2モータ105によって出力部材102は仮想的な球面上を移動することになる。このような第1モータ104及び第2モータ105は、回転軸の方向がz軸方向(鉛直方向)に略平行に配置されている。そして、第1モータ104の回転軸に第1アーム104aを、第2モータ105の回転軸に第2アーム105aをそれぞれ固定している。これら第1アーム104a及び第2アーム105aは、xy平面(水平面)に略平行に配置される。したがって、第1アーム104aは第1モータ104の駆動により、第2アーム105aは第2モータ105により、それぞれ略水平方向に揺動する。
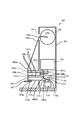
第3モータ108は、出力部材102を概ねz軸方向に移動させるための駆動源となる回転型アクチュエータの一例である。このような第3モータ108は、回転軸の方向がz軸と直交する直交軸(水平軸)と略平行となるように配置されている。そして、第3モータ108の回転軸に、回動腕部である第3アーム108aを固定している。この第3アーム108aは、第3モータ108の回転軸に直交する平面(水平面に略直交する平面)上に配置される。したがって、第3アーム108aは第3モータ108の駆動により、第3モータ108の回転軸を中心として、この回転軸に直交する平面に沿って揺動し、第3アーム108aの先端部に結合された後述の第3リンク機構109を介して、出力部材102を概ねz軸方向に移動することができる。厳密に言えば、第1モータ104と第2モータ105を停止している場合は、第3モータ108の駆動により出力部材102は仮想的な円弧上を移動することになる。なお、第3モータ108を駆動方向がz軸に略平行なリニアアクチュエータに変更してもよい。
第4モータ110は、出力部材102をz軸回り(鉛直軸回り)に回動させるための駆動源となる回転型アクチュエータの一例である。このような第4モータは、回転軸の方向がz軸方向(鉛直方向)に略平行となるように配置されている。そして、第4モータ110の回転軸に第4アーム110aを固定している。この第4アーム110aは、xy平面(水平面)に略平行に配置される。したがって、第4アーム110aは第4モータ110の駆動により略水平方向に揺動する。
第1リンク機構106及び第2リンク機構107は、出力軸103と第1モータ104の第1アーム104aとの間、及び、出力軸103と第2モータ105の第2アーム105aとの間に、それぞれ設けられている。そして、後述するように出力部材102の出力軸(回転軸)103をz軸に略平行に保つように保持しつつ、第1モータ104及び第2モータ105の駆動により出力部材102をz軸に交差する方向に移動可能としている。
上述のように、第1モータ104と出力部材102との間、及び、第2モータ105と出力部材102との間に、それぞれ平行リンク機構を設け、これら2個のモータにより出力部材102を出力軸に交差する方向に移動させている。このとき、第1軸104b及び第2軸105bはz軸方向に対して略平行を保ちながら移動される。このため、第1モータ104及び第2モータ105の駆動により、出力部材102の回転軸(出力軸103)のz軸方向(鉛直方向)に対する略平行の姿勢を保ちながら、この出力部材102を出力軸に交差する概ね水平の方向に移動させることができる。
第3リンク機構109は、出力部材102の出力軸103と第3モータ108の第3アーム108aとの間に設けられ、第3モータ108の駆動により出力部材102を概ねz軸方向に移動可能としている。このような第3リンク機構109は、回動腕部(可動部材)である第3アーム108aと、第3リンク部材である第3リンクバー109aと、出力軸103とにより構成される。
第3モータ108を駆動すると、第3アーム108aの先端が水平面に略直交する平面に沿って揺動し(第3アーム108aの運動により)、この第3アーム108aの先端に第3リンクバー109aを介して接続された出力部材102が概ね鉛直方向に移動する。厳密には第3アーム108aのみ駆動すると出力部材102は仮想的な円弧上を移動する。第1モータ104及び第2モータ105の駆動による、出力軸103に交差する概ね水平の方向への出力軸103の移動とともに、第3モータ108を駆動すれば、出力軸103の水平方向と鉛直方向への移動が可能となる。したがって、第1モータ104及び第2モータ105の駆動による出力部材102のz軸に交差する方向への移動に対応させて、第3モータ108の駆動により出力部材102をz軸に概ね平行な方向へ移動させることにより、xyz空間内で出力部材102を位置決め可能である。
また、本実施形態の場合、第2モータ105により水平方向に移動させられる第2軸105bの下端部に、軸受105dを介して回転部材であるリンクアーム105eを回転自在に支持している。また、第4モータ110の駆動をリンクアーム105eに伝達する回転伝達手段111を有する。
第4リンク機構112は、出力部材102の出力軸103と回転部材の駆動側腕部でもあるリンクアーム105eとの間に配置される。そして、出力部材102を鉛直軸回り(回転軸回り)に回転可能としている。このような第4リンク機構112は、出力軸103に設けられた出力側腕部である出力軸アーム103aと、リンクアーム105eとの間に、第4リンク部材である第4リンクバー112aを設けてなる。
また、本実施形態では、上述のように、出力部材102と、第1、第2、第3、第4モータ104、105、108、110との間に、それぞれ第1、第2、第3、第4リンク機構106、107、109、112を設けている。そして、第1、第2、第3、第4モータ104、105、108、110を、出力部材102の移動領域に対して水平方向に外れた位置に配置している。即ち、出力部材102がどの位置に移動しても、出力部材102が何れかのモータの鉛直方向下側に位置することはない。
第4モータ110が第4アーム110aを駆動すると、回転伝達手段111により回転伝達されてリンクアーム105eが第2軸105b回りに回転する。すると、第4リンク機構112により出力軸アーム103aに対してこのリンクアーム105eに追従して回転させる力が作用する。このとき、出力軸103に接続される各ジョイント部106b、107b、109bは、それぞれ出力軸103回りの自由度を有するため、出力軸103の回転は許容されている。したがって、上述のように出力軸アーム103aに回転させようとする力が作用すると、出力軸103及び出力部材102が出力軸103回りに回転する。
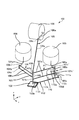
本発明の第2の実施形態について、図5を用いて説明する。本実施形態は、上述の第1の実施形態に対し、第1軸104bを第1アーム104aに支持する軸受104c、第2軸105bを第2アーム105aに支持する軸受105cを省略している。そして、第1軸104bと第1アーム104aとを固定または一体化し、第2軸105bと第2アーム105aとを固定または一体化している。
本発明の第3の実施形態について、図6を用いて説明する。本実施形態は、上述の第1、第2の実施形態と異なり、出力部材102及び出力軸103に対して回転自在な回転軸120を設けている。このために、出力部材102の下方に軸受121を介して回転軸120を設けている。また、回転軸120には、水平方向に突出するように回転軸アーム120aを設けている。そして、回転軸アーム120aの先端部と第4リンクバー112aの一端部とを、2自由度の第4出力側ジョイント部112bにより連結している。本実施形態では、回転軸アーム120aが上述の各実施形態の出力軸アーム103aに相当する。
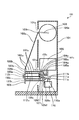
本発明の第4の実施形態について、図7及び図8を用いて説明する。本実施形態は、上述の各実施形態と異なり、第4出力側ジョイント部112bを、鉛直方向に関し、2個の第1出力側ジョイント部106bと、2個の第2出力側ジョイント部107bとの間に配置している。特に、本実施形態では、2個の第1出力側ジョイント部106bを結ぶ線分の中点と、2個の第2出力側ジョイント部107bを結ぶ線分の中点とを略一致させている。そして、第4出力側ジョイント部112bは、この略一致した中点と鉛直方向に関して略同等の位置に配置している。
本発明の第5の実施形態について、図10及び図11を用いて説明する。本実施形態では、上述の各実施形態と異なり、2個の第1出力側ジョイント部106bと、2個の第2出力側ジョイント部107bとを同一軸上に配置していない。即ち、これらジョイント部106b、107bを出力軸103に沿って配列させていない。このために、出力部材102の出力軸103から外れた位置に、2本のアーム102a、102bを固定している。これらアーム102a、102bは、z軸と平行に配置されている。そして、第1リンクバー106aをアーム102aに第1出力側ジョイント部106bにより連結し、第2リンクバー107aをアーム102bに第2出力側ジョイント部107bにより連結している。
上述の各実施形態では、ケース101はベース部材を兼ねるものとしたが、例えばケース101をカバー部材として、パラレルリンクロボットに対して着脱可能とし、各モータを覆う構造にしても良い。また、パラレルリンクロボットの機構部から部分的に露出するアクチュエータを覆うためのカバー部材を用いても良い。このように、本発明のケース101としては上記のカバー部材及び、カバー部材と他の機構部材の任意の組合せも含むものとする。また、各実施形態の構成は、適宜組み合わせて実施することができる。
101 ケース
102 出力部材
103 出力軸
103a 出力軸アーム(出力側腕部)
103b クランク部(出力側腕部)
104 第1モータ(第1アクチュエータ)
104b 第1軸
105 第2モータ(第2アクチュエータ)
105b 第2軸
105e、105f リンクアーム(回転部材、駆動側腕部)
106 第1リンク機構
106a 第1リンクバー(第1リンク部材)
106b 第1出力側ジョイント部
106c、106c´ 第1駆動側ジョイント部
107 第2リンク機構
107a 第2リンクバー(第2リンク部材)
107b 第2出力側ジョイント部
107c、107c´ 第2駆動側ジョイント部
108 第3モータ(第3アクチュエータ)
109 第3リンク機構
109a 第3リンクバー(第3リンク部材)
109b 第3出力側ジョイント部
109c 第3駆動側ジョイント部
110 第4モータ(第4アクチュエータ)
111 回転伝達手段
112 第4リンク機構
112a 第4リンクバー(第4リンク部材)
112b 第4出力側ジョイント部
112c 第4駆動側ジョイント部
120 回転軸
120a 回転軸アーム(出力側腕部)
120b クランク部(出力側腕部)
Claims (7)
- 鉛直方向と略平行な回転軸を有する出力部材と、
前記出力部材を前記回転軸と交差する方向に移動させる第1アクチュエータ及び第2アクチュエータと、
前記出力部材を概ね鉛直方向に移動させる第3アクチュエータと、
前記出力部材を前記回転軸回りに回動させる第4アクチュエータと、
前記出力部材と、前記第1、第2、第3、第4アクチュエータとの間にそれぞれ設けられた複数のリンク機構と、を備え、
前記第1、第2、第3アクチュエータ及び前記複数のリンク機構により、前記出力部材を鉛直方向に対して傾斜させることなく、鉛直方向及び水平方向に移動可能であり、且つ、前記第4アクチュエータにより前記出力部材を前記回転軸回りに回転可能で、
前記第1、第2、第3、第4アクチュエータを、水平方向に関し前記出力部材の移動領域に対して外れた位置に配置した、
ことを特徴とするパラレルリンクロボット。 - 前記第1アクチュエータと前記第2アクチュエータとは、装置の上方から眺めた場合に前記第1アクチュエータの中心と前記出力部材の中心とを結ぶ線分と、前記第2アクチュエータの中心と前記出力部材の中心とを結ぶ線分との成す角度が、0°よりも大きく且つ180°よりも小さくなるように配置され、
前記第3アクチュエータ及び前記第4アクチュエータは、水平方向に関し、前記第1アクチュエータと前記第2アクチュエータとの間に配置されている、
ことを特徴とする、請求項1に記載のパラレルリンクロボット。 - 前記第1、第2、第3、第4アクチュエータを、それぞれの可動部が前記出力部材側に突出しないように収納するケースを有する、
ことを特徴とする、請求項1又は2に記載のパラレルリンクロボット。 - 前記出力部材と前記第1アクチュエータ及び前記第2アクチュエータとの間にそれぞれ設けられた第1リンク機構及び第2リンク機構は、前記出力部材の回転軸と平行で前記出力部材から水平方向に外れた位置に配置され、前記第1アクチュエータ又は前記第2アクチュエータの駆動により移動させられる第1軸及び第2軸と、前記第1軸又は前記第2軸と前記出力部材との間に、それぞれ互いに平行に配置された複数の第1リンク部材及び複数の第2リンク部材と、をそれぞれ有し、
前記第1軸、前記出力部材、前記複数の第1リンク部材で平行リンク機構を構成し、前記第2軸、前記出力部材、前記複数の第2リンク部材で平行リンク機構を構成している、
ことを特徴とする、請求項1ないし3のうちの何れか1項に記載のパラレルリンクロボット。 - 前記第1軸又は前記第2軸に回転自在に支持された回転部材と、
前記第4アクチュエータの駆動を前記回転部材に伝達する回転伝達手段と、を有し、
前記出力部材と前記第4アクチュエータとの間に設けられた第4リンク機構は、前記出力部材と前記回転部材との間に配置される、
ことを特徴とする、請求項4に記載のパラレルリンクロボット。 - 前記第3アクチュエータは、回転型アクチュエータ又はリニアアクチュエータであり、前記出力部材よりも鉛直方向に関して上方で且つ前記出力部材から水平方向に関して外れた位置に配置され、
前記出力部材と前記第3アクチュエータとの間に設けられた第3リンク機構は、前記第3アクチュエータにより動かされる可動部材と、前記可動部材と前記出力部材との間に配置された第3リンク部材と、を有し、
前記第3リンク部材を介して、前記可動部材の運動により、前記出力部材を概ね鉛直方向に移動させる、
ことを特徴とする、請求項1ないし5のうちの何れか1項に記載のパラレルリンクロボット。 - 前記第1アクチュエータと前記第2アクチュエータとのうちの少なくとも一方は、回転型アクチュエータであり、
前記第4アクチュエータは、回転型アクチュエータであり、
前記第4アクチュエータを、その回転軸が、回転型アクチュエータである前記第1アクチュエータ又は前記第2アクチュエータの回転軸と同軸上となるように配置した、
ことを特徴とする、請求項1ないし6のうちの何れか1項に記載のパラレルリンクロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058994A JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058994A JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012192499A true JP2012192499A (ja) | 2012-10-11 |
| JP2012192499A5 JP2012192499A5 (ja) | 2014-05-01 |
Family
ID=47084905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011058994A Pending JP2012192499A (ja) | 2011-03-17 | 2011-03-17 | パラレルリンクロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012192499A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103286773A (zh) * | 2013-07-01 | 2013-09-11 | 安徽工业大学 | 一种三自由度并联机器人机构 |
| KR101859297B1 (ko) * | 2016-12-07 | 2018-06-27 | 고려대학교 세종산학협력단 | 4 자유도 메커니즘 |
| JPWO2022176967A1 (ja) * | 2021-02-17 | 2022-08-25 | ||
| WO2023085338A1 (ja) * | 2021-11-09 | 2023-05-19 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01306192A (ja) * | 1988-05-31 | 1989-12-11 | Pentel Kk | ロボットのアーム駆動装置 |
| JPH06143165A (ja) * | 1992-10-30 | 1994-05-24 | Japan Airlines Co Ltd | 作業用ロボット |
| WO1998030366A1 (en) * | 1997-01-14 | 1998-07-16 | Asea Brown Boveri Ab | A device for relative displacement of two elements |
| WO1999058301A1 (en) * | 1998-04-29 | 1999-11-18 | Abb Ab | A device for relative movement of two elements |
| US6095011A (en) * | 1996-03-14 | 2000-08-01 | Abb Ab | Device for relative movement of two elements |
| US20010002098A1 (en) * | 1997-11-03 | 2001-05-31 | Douglas Haanpaa | Haptic pointing devices |
| WO2003078111A1 (en) * | 2002-03-18 | 2003-09-25 | Abb Ab | Manipulator and method involving a manipulator for movement of an object, comprising at least two driving parallel kinematic connecting chains |
| US20040013509A1 (en) * | 1999-08-05 | 2004-01-22 | Roy Shambhu Nath | Parallel kinematics mechanism with a concentric spherical joint |
| JP2004508950A (ja) * | 2000-09-11 | 2004-03-25 | エービービー エービー | 空間で物体を動かすための3本以上のアームを伴うマニピュレータ |
| JP2005516784A (ja) * | 2002-02-06 | 2005-06-09 | アーベーベー・アーベー | 産業用ロボット |
| US20060245894A1 (en) * | 2005-03-21 | 2006-11-02 | Michael Merz | Parallel robot |
| WO2012031954A1 (en) * | 2010-09-10 | 2012-03-15 | Abb Research Ltd | An industrial robot including a parallel kinematic manipulator |
-
2011
- 2011-03-17 JP JP2011058994A patent/JP2012192499A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01306192A (ja) * | 1988-05-31 | 1989-12-11 | Pentel Kk | ロボットのアーム駆動装置 |
| JPH06143165A (ja) * | 1992-10-30 | 1994-05-24 | Japan Airlines Co Ltd | 作業用ロボット |
| US6095011A (en) * | 1996-03-14 | 2000-08-01 | Abb Ab | Device for relative movement of two elements |
| WO1998030366A1 (en) * | 1997-01-14 | 1998-07-16 | Asea Brown Boveri Ab | A device for relative displacement of two elements |
| US20010002098A1 (en) * | 1997-11-03 | 2001-05-31 | Douglas Haanpaa | Haptic pointing devices |
| WO1999058301A1 (en) * | 1998-04-29 | 1999-11-18 | Abb Ab | A device for relative movement of two elements |
| US20040013509A1 (en) * | 1999-08-05 | 2004-01-22 | Roy Shambhu Nath | Parallel kinematics mechanism with a concentric spherical joint |
| JP2004508950A (ja) * | 2000-09-11 | 2004-03-25 | エービービー エービー | 空間で物体を動かすための3本以上のアームを伴うマニピュレータ |
| JP2005516784A (ja) * | 2002-02-06 | 2005-06-09 | アーベーベー・アーベー | 産業用ロボット |
| WO2003078111A1 (en) * | 2002-03-18 | 2003-09-25 | Abb Ab | Manipulator and method involving a manipulator for movement of an object, comprising at least two driving parallel kinematic connecting chains |
| US20060245894A1 (en) * | 2005-03-21 | 2006-11-02 | Michael Merz | Parallel robot |
| WO2012031954A1 (en) * | 2010-09-10 | 2012-03-15 | Abb Research Ltd | An industrial robot including a parallel kinematic manipulator |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103286773A (zh) * | 2013-07-01 | 2013-09-11 | 安徽工业大学 | 一种三自由度并联机器人机构 |
| KR101859297B1 (ko) * | 2016-12-07 | 2018-06-27 | 고려대학교 세종산학협력단 | 4 자유도 메커니즘 |
| JPWO2022176967A1 (ja) * | 2021-02-17 | 2022-08-25 | ||
| WO2022176967A1 (ja) * | 2021-02-17 | 2022-08-25 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| JP7383213B2 (ja) | 2021-02-17 | 2023-11-20 | 玲於奈 望月 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
| WO2023085338A1 (ja) * | 2021-11-09 | 2023-05-19 | 望月玲於奈 | 回転機構、飛行体、積載物の姿勢制御装置、方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8109173B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| US8893578B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| US20130142608A1 (en) | Parallel mechanism | |
| JP4125960B2 (ja) | 産業用ロボット | |
| JP6914568B2 (ja) | 産業用ロボットアーム | |
| JP2010115776A (ja) | 多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット | |
| JP2006341283A (ja) | アーク溶接用ポジショナ及びアーク溶接ロボットシステム | |
| JP6582491B2 (ja) | ロボット | |
| WO2018105584A1 (ja) | 産業用ロボット | |
| JP2014124742A (ja) | アーム駆動装置 | |
| JP6110620B2 (ja) | パラレルリンクロボット | |
| JP2004291166A (ja) | 四自由度パラレルロボット | |
| JP2012192499A (ja) | パラレルリンクロボット | |
| JP2014039977A (ja) | パラレルロボット | |
| CN111819038B (zh) | 采用平行连杆机构的作业设备及其控制方法 | |
| JP6677970B2 (ja) | 産業用ロボット | |
| JP2012192500A (ja) | パラレルリンクロボット | |
| JP5833869B2 (ja) | デルタ型パラレルロボット | |
| KR101649108B1 (ko) | 관절 구조체 및 이를 구비한 로봇 | |
| JP4270041B2 (ja) | ロボットの手首装置とこれを備えたロボット | |
| JP2018069354A (ja) | リンク式多関節ロボット | |
| JP6043561B2 (ja) | パラレルリンクロボット | |
| JP5866154B2 (ja) | パラレルリンクロボット | |
| JP5840590B2 (ja) | 可動体支持装置 | |
| JP2011056661A (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140317 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150623 |