JP2012188211A - 産業車両用回転クランプ装置の垂直姿勢検知機構 - Google Patents
産業車両用回転クランプ装置の垂直姿勢検知機構 Download PDFInfo
- Publication number
- JP2012188211A JP2012188211A JP2011052433A JP2011052433A JP2012188211A JP 2012188211 A JP2012188211 A JP 2012188211A JP 2011052433 A JP2011052433 A JP 2011052433A JP 2011052433 A JP2011052433 A JP 2011052433A JP 2012188211 A JP2012188211 A JP 2012188211A
- Authority
- JP
- Japan
- Prior art keywords
- arm member
- slit
- load
- clamp device
- hole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Abstract
【解決手段】 回転クランプ装置3は、回転可能なベース32を有する第1のアーム部材30Aと、第1のアーム部材30Aとの間で荷Lを把持しまたは荷Lの把持状態を開放するように回動可能な第2のアーム部材30Bと、第2のアーム部材30Bを駆動する油圧シリンダ5と、ベース32に設けられ、油圧シリンダ5に対して油圧の供給を行うロータリバルブ42とを備えている。ベース32には、ロータリバルブ42を油圧シリンダ5に油圧ホース接続するための開孔部32aが貫通形成され、開孔部32aには、これと連通するスリット80が形成されたスリットプレート8が取り付けられている。ロータリバルブ42の内部には、レーザ光を出射するレーザマーカ7が設けられ、レーザマーカ7から出射されるレーザ光は開孔部32aおよびスリット80を透過するようになっている。
【選択図】 図2
Description
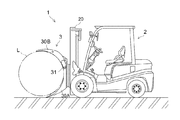
図1ないし図6は、本発明の一実施例による回転クランプ装置用垂直姿勢検知機構を説明するための図である。以下、これらの図において、車両前方を前方、前側、前端側または前面側と呼称し、車両後方を後方、後側、後端側または背面側と呼称することにする。
回転クランプ機構3により荷Lを把持する際には、ロータリバルブ42を介して油圧シリンダ5に油圧を供給しピストンロッド51を縮退させることにより(図2参照)、第2のアーム部材30Bを回動させて開放位置に移動させる。この状態から、荷Lの左右両側または上下両側に各アーム部材30A、30Bを配置した後、ロータリバルブ42を介して油圧シリンダ5に油圧を供給しピストンロッド51を伸長させることにより(図2参照)、第2のアーム部材30Bを回動させて把持位置に移動させる。これにより、第1、第2のアーム部材30A、30Bにより荷Lが把持される(図1参照)。
2: 車両本体
3: 回転クランプ装置
30A: 第1のアーム部材
30B: 第2のアーム部材
32: ベース(回転ベース)
32a: 開孔部(貫通孔)
4: ロータリジョイント
42: ロータリバルブ
42a: 孔
45: 油圧ホース
5: 油圧シリンダ
7: レーザマーカ
8: スリットプレート
80: スリット
L: 荷
B: レーザ光
S、S’: 照射領域
Claims (3)
- 産業車両の回転クランプ装置のための垂直姿勢検知機構において、
前記回転クランプ装置が、回転可能な回転ベースを有しかつ車両本体の前方に配置される第1のアーム部材と、前記第1のアーム部材にヒンジ連結され、前記第1のアーム部材との間で荷を把持する把持位置および荷の把持状態を開放する開放位置の双方の位置をとり得るように回動可能な第2のアーム部材と、前記第2のアーム部材を駆動する油圧アクチュエータと、前記第1のアーム部材の前記回転ベースに設けられ、前記油圧アクチュエータに対して油圧の供給を行うロータリバルブとを備え、
前記回転ベースには、前記ロータリバルブを前記油圧アクチュエータに油圧ホース接続するための貫通孔が形成され、前記貫通孔には、当該貫通孔と連通するスリットが形成されたスリットプレートが取り付けられており、前記ロータリバルブの内部には、車両前方に向かってレーザ光を出射するレーザマーカが設けられ、前記レーザマーカから出射されるレーザ光が前記貫通孔および前記スリットを透過するようになっている、
ことを特徴とする産業車両用回転クランプ装置の垂直姿勢検知機構。 - 請求項1において、
前記スリットが直線状に延びる1本の間隙から構成され、前記レーザマーカからのレーザ光が水平面内で扇状に拡散するように出射されるとともに、前記第1、第2のアーム部材の垂直姿勢時には、前記スリットが水平方向に配設されるとともに、前記レーザマーカから出射され前記スリットを透過して荷に照射されたレーザ光の照射領域は、前記第1、第2のアーム部材が前記垂直姿勢時から傾斜して配置されている場合に比べて最も長い水平線を描いている、
ことを特徴とする産業車両用回転クランプ装置の垂直姿勢検知機構。 - 請求項1において、
前記スリットプレートは、前記貫通孔の中心回りの回転位置が調整可能になっている、
ことを特徴とする産業車両用回転クランプ装置の垂直姿勢検知機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011052433A JP5704978B2 (ja) | 2011-03-10 | 2011-03-10 | 産業車両用回転クランプ装置の垂直姿勢検知機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011052433A JP5704978B2 (ja) | 2011-03-10 | 2011-03-10 | 産業車両用回転クランプ装置の垂直姿勢検知機構 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012188211A true JP2012188211A (ja) | 2012-10-04 |
| JP5704978B2 JP5704978B2 (ja) | 2015-04-22 |
Family
ID=47081811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011052433A Active JP5704978B2 (ja) | 2011-03-10 | 2011-03-10 | 産業車両用回転クランプ装置の垂直姿勢検知機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5704978B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106583938A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 一种激光标印装置 |
| CN106583934A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 一种经济型激光标印系统 |
| CN108382871A (zh) * | 2018-02-10 | 2018-08-10 | 厦门厦金机械股份有限公司 | 组合式夹木叉 |
| CN111302274A (zh) * | 2019-12-12 | 2020-06-19 | 陈琪 | 一种钢材搬运机械设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56108699A (en) * | 1980-01-31 | 1981-08-28 | Toyoda Automatic Loom Works | Turning gear for fork lift |
| JPS62133086U (ja) * | 1986-02-17 | 1987-08-21 | ||
| US5141387A (en) * | 1991-06-06 | 1992-08-25 | Smith Barney S | Apparatus for handling drums |
| JP2002226194A (ja) * | 2001-02-01 | 2002-08-14 | Komatsu Forklift Co Ltd | フォークリフトトラック |
| JP2006248637A (ja) * | 2005-03-09 | 2006-09-21 | Nippon Yusoki Co Ltd | 荷役車両 |
| JP2010163240A (ja) * | 2009-01-15 | 2010-07-29 | Tcm Corp | フォークリフト |
-
2011
- 2011-03-10 JP JP2011052433A patent/JP5704978B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56108699A (en) * | 1980-01-31 | 1981-08-28 | Toyoda Automatic Loom Works | Turning gear for fork lift |
| JPS62133086U (ja) * | 1986-02-17 | 1987-08-21 | ||
| US5141387A (en) * | 1991-06-06 | 1992-08-25 | Smith Barney S | Apparatus for handling drums |
| JP2002226194A (ja) * | 2001-02-01 | 2002-08-14 | Komatsu Forklift Co Ltd | フォークリフトトラック |
| JP2006248637A (ja) * | 2005-03-09 | 2006-09-21 | Nippon Yusoki Co Ltd | 荷役車両 |
| JP2010163240A (ja) * | 2009-01-15 | 2010-07-29 | Tcm Corp | フォークリフト |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106583938A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 一种激光标印装置 |
| CN106583935A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 激光标印装置 |
| CN106583936A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 具有夹具的激光标印装置 |
| CN106583934A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 一种经济型激光标印系统 |
| CN106583937A (zh) * | 2014-06-10 | 2017-04-26 | 赵牧青 | 一种具有夹具的激光标印装置 |
| CN108382871A (zh) * | 2018-02-10 | 2018-08-10 | 厦门厦金机械股份有限公司 | 组合式夹木叉 |
| CN108382871B (zh) * | 2018-02-10 | 2024-03-29 | 厦门厦金机械股份有限公司 | 组合式夹木叉 |
| CN111302274A (zh) * | 2019-12-12 | 2020-06-19 | 陈琪 | 一种钢材搬运机械设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5704978B2 (ja) | 2015-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5704978B2 (ja) | 産業車両用回転クランプ装置の垂直姿勢検知機構 | |
| JP5851062B1 (ja) | 照明装置 | |
| EP2829499B1 (en) | Outrigger connection locking device | |
| US10322756B2 (en) | Work vehicle | |
| JP2015229184A (ja) | 自動溶接装置 | |
| EP1829811A2 (en) | Working machine | |
| JP4472763B2 (ja) | 建機車輌 | |
| JP4902581B2 (ja) | 複数の使用位置を有する制御コンソール | |
| EP3028901B1 (en) | Work vehicle | |
| EP3025907A1 (en) | Work vehicle | |
| US10131281B2 (en) | Work vehicle | |
| JP2014133438A (ja) | 作業機 | |
| US9796238B2 (en) | Work vehicle | |
| US20140304945A1 (en) | Attaching structure for door of working vehicle | |
| JP2010265674A (ja) | 作業機 | |
| JP2010036732A (ja) | 車体構造 | |
| JP2009035185A (ja) | トラクタのアシストグリップ | |
| ES2806282T3 (es) | Dispositivo de soldadura orbital con sistema de acoplamiento de bobina simplificado | |
| JP2010071054A (ja) | 作業車両 | |
| JP6374822B2 (ja) | 作業機 | |
| JP2014190363A (ja) | エンジンのベルトテンション調整装置 | |
| WO2016147920A1 (ja) | 作業機の支軸部材着脱構造 | |
| JP4395328B2 (ja) | 車両用灯具 | |
| JP5537275B2 (ja) | 産業車両のウイングバケット回動機構 | |
| JP2001336171A (ja) | 油圧回転式グラップルの旋回装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140307 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5704978 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R370 | Written measure of declining of transfer procedure |
Free format text: JAPANESE INTERMEDIATE CODE: R370 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |