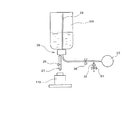
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である水薬調剤装置の構成を示すブロック図である。また、図2は、水薬調剤装置の概略斜視図である。なお、図2では、見易さのために、後述する三つの回転ユニット12のうち、一つの回転ユニット12のみを手前側に引き出した状態を図示している。
この水薬調剤装置は、操作部18を介して入力された処方箋データに基づいて、互いに異なる1種類以上の水薬を順次、元薬瓶100から投薬瓶110に吐出し、調剤するものである。元薬瓶100は、予め、水薬調剤装置に設けられた三つの回転ユニット12にセットされている。各回転ユニット12は、三つの元薬瓶100を保持しつつ回転することで、当該三つの元薬瓶100を転倒させる。そして、転倒した状態で、元薬瓶100に接続された吐出ノズル27に設けられた吐出バルブ26を開放することで、吐出ノズル27から水薬が吐出される。
本実施形態では、三つの回転ユニット12が、装置幅方向(図2におけるy方向)に配設されている。また、各回転ユニット12は、三つの元薬瓶100を装置奥行き方向(図2におけるx方向)に並べて保持しているため、装置全体としては、合計九つの元薬瓶100が3×3のアレイ状に配されていることになる。なお、各回転ユニット12は、元薬瓶100の交換やメンテナンスのために、手前側に引き出し自在となっている。この引き出しの際、装置筐体に設置されたバーコードリーダ(図2では図示せず)が、元薬瓶100に付されたバーコードを読み込む。制御部は、この読み込まれた情報に基づいて、各元薬瓶100の種類や位置を管理する。
水薬が投入される投薬瓶110は、アダプタ38にセットされた状態で、秤台34に載置される。アダプタ38は、投薬瓶110の上端高さを調整するもので、昇降自在の載置台を備えている。
秤台34は、XYテーブル36に組みつけられており、回転ユニット12の下側において、水平移動する。この秤台34には、ロードセルが組み込まれており、上側に載置されたアダプタ38および投薬瓶110の重量を検出する。制御部は、XYテーブルの駆動を制御して、投薬瓶110を所望の水薬を貯留した元薬瓶100の真下位置に移動させる。そして、その状態で元薬瓶100を転倒し、吐出バルブ26を開放することで、投薬瓶110に水薬が投入される。制御部は、秤台34に設けられたロードセルでの検出値に基づいて、当該投薬瓶110に投入された水薬量を算出する。
なお、この投薬の際、投薬瓶110のサイズが不適切であったり、投薬瓶110に蓋が装着されたままであったりすると、適切な水薬調剤ができないだけでなく、元薬瓶100から吐出された水薬の飛散等の問題も生じる。そのため、回転ユニット12の下側空間である吐出空間への入口近傍には、投薬瓶110のサイズを検出するサイズ用センサ40および蓋の有無を検出する蓋用センサ42が設けられている。以下、この水薬調剤装置の各部について詳説していく。
[元薬瓶および投薬瓶]
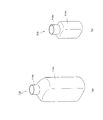
はじめに、ユーザにより水薬調剤装置にセットされる元薬瓶100および投薬瓶110について説明する。図3は元薬瓶100の斜視図および断面図である。元薬瓶100は、吐出すべき水薬を貯留する略円筒形の容器である。元薬瓶100のサイズは、水薬種類に関わらず、ほぼ同一で、大径の胴部100aの上側に、小径の口部100bが接続されている。胴部100には、当該元薬瓶100の種類を示す薬種類用識別子として機能する薬種類用バーコード102が貼着されている。
この元薬瓶100を回転ユニット12にセットする場合、当該元薬瓶100の口部100bには、吐出ノズル27等が接続された特殊キャップ25が装着される。特殊キャップ25は、元薬瓶口部100bに対して、螺合により着脱自在のキャップである。この特殊キャップ25のうち、口部100bの上端面との接触位置には、弾性材料からなるシール体25aが配置されており、元薬瓶100からの液漏れが防止されている。また、特殊キャップ25の上面からは、吐出ノズル27が突出形成されている。元薬瓶100に収容されている水薬は、この吐出ノズル27を通じて、外部に吐出される。
吐出ノズル27に隣接する位置には、エアノズル29が挿通されている。エアノズル29は、大気圧開放バルブ31を経由してポンプ20に接続されたノズルである。このエアノズル29を通じて、元薬瓶100にエアが送りこまれる。なお、このエアノズル29の下端は、元薬瓶100の底部近傍まで延びており、元薬瓶100を転倒した際には、当該下端(元薬瓶が180度転倒した場合は上端になる)が水面から突出できるようになっている。
図4は、投薬瓶110の一例を示す斜視図である。投薬瓶110は、水薬調剤のために、水薬が吐出される容器である。水薬が吐出、調剤された投薬瓶110は、蓋(図示せず)をされた状態で患者に渡される。ここで、この投薬瓶110は、調剤に必要とされる水薬の総量に応じて、様々なサイズのものが用意されている。例えば、投薬瓶110としては、30ml用、60ml用、100ml用、150ml用、200ml用のサイズのものが用意されており、その容量ごとに、全長(高さ)が異なっている。なお、容量が同じ投薬瓶110の場合は、全長はほぼ同じである。水薬調剤の際、ユーザは、この様々な投薬瓶110の中から、調剤すべき水薬総量に適した投薬瓶110を選択し、水薬調剤装置にセットする。
[回転ユニット]
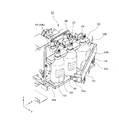
図5は、一つの回転ユニット12の斜視図である。また、図6は、回転ユニット12の分解斜視図である。さらに、図7は、後述する保持バー52を開いた状態での回転ユニット12の斜視図である。
回転ユニット12は、三つの元薬瓶100を保持しつつ回転することで、当該三つの元薬瓶100を連動して転倒させるユニットで、元薬瓶100の保持手段として機能するものである。各回転ユニット12は、固定部材(装置筐体)に固着された固定板46と、固定板46に対して回転自在の回転板44、および、回転板44を回転させる回転機構48などから構成される。
回転板44は、元薬瓶100が載置される載置面44aと、当該載置面44aに対して略90度上側に延びる立面44bと、を備えた略L字状となっている。載置面44aの上側には、ウレタン等の弾性材料からなるカバーシート49が設けられている。このカバーシート49には、元薬瓶100の底部外径に対応した大きさの略円形の凹部が形成されており、当該凹部内に元薬瓶100を載置することで、投薬瓶110が位置決めされる。
立面44bには、吐出ノズル27を開閉する吐出バルブ26が固着されている。この吐出バルブ26は、制御部10により開閉制御されるピンチバルブである。この吐出バルブ26に接続される信号線は、回転板44の後側に引き出された後、制御部10に接続される。また、元薬瓶100から延びるエアノズル29も、回転板44の後側に引き出された後、水薬調剤装置の上側に設置されたポンプ20に接続される。また、立面44bには、後述する保持バー52と協働して元薬瓶100の落下を防止する保持部材50も形成されている。この保持部材50は、ウレタン等の弾性材料を金属板で挟持したもので、立面44bのうち元薬瓶100の肩部相当の高さ位置から突出形成されている。この保持部材50には、セットされた元薬瓶100の口部の通過を許容する切り欠きなどが設けられており、元薬瓶100の転倒時には、元薬瓶100の肩部に当接し、当該元薬瓶100の落下を防止する。
保持バー52は、ヒンジ(図示せず)を介して回転板44の後端に装着されたもので、回転板44に対して開閉自在となっている。保持バー52の先端には、回転板44に設けられた留め金に係止可能なバックル52aが設けられており、当該バックル52aを留め金に係止させることで、閉鎖状態を維持できるようになっている。また、保持バー52のうち、回転板44との対向面には、ウレタン等の弾性材料からなる押圧体52bが突出形成されている。この押圧体52bは、載置面44aに載置された元薬瓶100に対応した形状をしており、保持バー52が閉鎖状態の際には、元薬瓶100の側面を押圧できるようになっている。そして、この押圧体52bで押圧されることにより、三つの元薬瓶100が落下や位置ズレが防止された状態で一括して保持されることになる。
ここで、この保持バー52は、閉鎖時において、元薬瓶100に貼着された薬種類用バーコード102を避けた高さに設置される。したがって、保持バー52を閉鎖したとしても、薬種類用バーコード102は、外部に露出して視認可能な状態となる。また、保持バー52には、下方に垂れ下がる三つの貼着板52cが設けられている。この貼着板52cは、位置を示す位置用識別子として機能する位置用バーコード54が貼着される板である。この貼着板52cは、回転板44に載置された三つの元薬瓶100同士の間に位置するように、一定間隔で配置されている。別の見方をすれば、保持バー52を閉鎖した際に、元薬瓶100の側面に貼着された薬種類用バーコード102と、貼着板52cに貼着された位置用バーコード54と、が交互に元薬瓶100の隣接方向(図5におけるx方向)に並ぶようになっている。装置筐体に設けられたバーコードリーダ(図示せず)は、この交互に並んだ二種類のバーコード102,54を順次、読み込み、各元薬瓶100の種類や位置を把握するが、これについては後に詳説する。
この回転板44は、回転機構48により固定板46に対して略180度回転させられる。回転機構48は、図6に図示するように、回転板44を回転自在に軸支する支持軸48cや、固定板46に固定設置されたモータ48a、モータ48aの出力軸に接続されたギア48b、回転板44に固着されるとともにギア48bに歯合するインターナルギア48d、および、インターナルギア48dの外周囲を覆う略円筒形のカバー48eなどから構成される。制御部10は、調剤処理の進行状況に応じて、適宜、モータ48aを駆動し、回転板44を回転、ひいては、元薬瓶100を転倒させる。
ここで、この図6から明らかなとおり、回転板44と固定板46との間には、回転板44の回転軸とほぼ同心位置に設けられたカバー48eが介在することになる。このカバー48eの外周には、エアノズル29や吐出バルブ26から引き出された信号線などといった、一端が回転板44とともに回転し、他端がポンプ20や制御部10などの固定部材に接続される線材が巻き付けられる。この巻き付けの方向は、回転板44の回転方向とは逆方向となっている。すなわち、回転板44が正面向かって左回りに回転する場合、線材は右回りに巻き付けられる。このように線材をカバー48eの外周に巻き付けるのは、回転板44の回転に伴う線材の垂れや、引っ張りを防止するためである。これについて、図8を用いて説明する。
図8は、回転ユニット12の概略側面図であり、(a)は回転前の、(b)は回転後の様子をそれぞれ示している。回転ユニット12が回転すると、当然ながら、当該回転板44に載置された元薬瓶100も回転する。そして、この元薬瓶100の回転に伴い、当該元薬瓶100に挿通されたエアノズル29の端部位置も変化することになる。このときエアノズル29を、カバー48eに巻き付けていない場合には、回転に伴う端部位置の変化に追随することができず、エアノズル29が引っ張られてしまうことになる。もちろん、図8(a)において符号29´で図示するように、エアノズル29´の垂れ量を多くとっておくことで、この引っ張りは防止できる。しかし、かかるエアノズル29´の垂れは、他の線材との絡まりなどの要因となるため望ましくない。そこで、本実施形態では、エアノズル29などの線材は、カバー48eの外周囲に巻きつけている。これにより、回転前に、エアノズル29などの線材が不必要に垂れることが防止される。また、回転板44の回転に伴いエアノズル29の端部位置が変化しても、当該変化分だけ、巻き付けが解除されるため、エアノズル29が引っ張られることもない。つまり、エアノズル29などの線材を、略円筒形のカバー48eに巻き付けておくことで、当該線材の垂れや引っ張りが防止される。なお、本実施形態では、カバー48eに線材を巻き付けているが、回転板44と固定板46との間において、回転板44の回転軸とほぼ同心位置に位置する部材であれば、他の部材に線材を巻きつけてもよい。
ここで、これまで説明した回転ユニット12は、手前側に引き出し自在となっている。図9は、引き出されている途中の回転ユニット12を固定板46側から見た図である。図9に図示するように、固定板46の背面には、装置奥行き方向(x方向)に延びる二本のレール56が設けられている。この二本のレールは、装置筐体に固着されたガイド溝58に挿通されており、当該ガイド溝58に沿って摺動自在となっている。その結果、固定板46を含めた回転ユニット12全体が、装置筐体に対して進退自在となっている。
元薬瓶100の交換等を行う場合、ユーザは、回転ユニット12を手前側に引き出し、回転ユニット12を外側に露出させる。すなわち、図9に図示するような状態にする。そして、その状態で、元薬瓶100の交換などの作業を行う。そして、所定の作業が完了すれば、ユーザは、引き出した回転ユニット12を奥側に押し込み、再び、元の位置に戻す。
なお、装置筐体のうち、回転ユニット12で保持されている元薬瓶100に対向する位置には、元薬瓶100や保持バー52に貼着されたバーコード54,102を読み取るためのバーコードリーダ24が設置されている(図16(a)など参照)。制御部10は、このバーコードリーダ24で読み取られた値に基づいて、元薬瓶100の種類や位置を管理しているが、これについては、後に詳説する。
ところで、これまでの説明で明らかなとおり、本実施形態では、複数の元薬瓶100を一つの回転ユニット12で保持し、当該回転ユニット12を回転させることで複数の元薬瓶100を連動して転倒させている。換言すれば、単一の回転機構で、複数の元薬瓶100を連動して転倒させている。そのため、本実施形態では、特許文献1に記載されているような従来技術に比して、元薬瓶100の転倒に要する駆動源や伝達機構の個数を低減することができる。そして、結果として、より簡易な構成で適切な調剤処理を行うことができる。
[吐出機構]
次に、元薬瓶100から水薬を吐出させる吐出機構について説明する。本実施形態では、元薬瓶100を転倒させ、そのときに受ける重力により水薬を吐出させる。したがって、元薬瓶100を転倒させる回転ユニット12や吐出ノズル27を開閉する吐出バルブ26は、吐出機構の一部と考えられる。また、これらの他にも、水薬吐出に関する機構として、本実施形態では、元薬瓶100にエアを供給するポンプ20や、当該ポンプ20とエアノズル29とを接続するエアチューブ30、複数のバルブ26,28なども備えている(図1参照)。
ポンプ20は、元薬瓶100にエアを供給して、その内圧を上昇させることで、水薬の吐出を助長するものである。このポンプ20は、装置の上部に固定設置されており、制御部10からの指示に応じて駆動される。ポンプ20に接続されたエアチューブ30は、途中で複数に分岐し、エアノズル29として元薬瓶100に接続される。各エアノズル29には、ポンプ20との連通状態を許容または遮断するための切替バルブ28が設けられている。水薬吐出時、制御部10は、複数の切替バルブ28の中から、所望の元薬瓶100に対応する切替バルブ28を択一的に選択し、開放する。これにより、ポンプ20と元薬瓶100とが接続される。
エアチューブ30には、大気圧開放バルブ31が設けられている。この大気圧開放バルブ31は、ポンプ20より下流側、かつ、切替バルブ28より上流側に設けられており、開放されることで、ポンプ20と連通されている元薬瓶100の内圧を大気圧に戻すことができるようになっている。また、大気圧開放バルブ31を通じて、外気に存在する粉塵等の侵入を防止するために、大気圧開放バルブ31と元薬瓶100との間には、フィルタ32が設けられている。
水薬を吐出する際、制御部10は、回転ユニット12やポンプ20、各種バルブ26,28,31などを駆動制御するが、この具体的な制御の流れについては後に詳説する。
[移動秤ユニット]
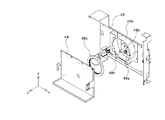
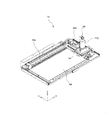
図10は、移動秤ユニットの斜視図である。この移動秤ユニットは、水薬調剤装置の下部に設置されており、回転ユニット12の下側において投薬瓶110を水平移動させる。この移動秤ユニット14は、水薬調剤装置の下部において引き出し自在に構成された引出トレイ19上に構成されている。したがって、引出トレイ19を引き出すことにより、この移動秤ユニット14は、装置の外部に引き出すことができるようになっている。そして、これにより、ユーザは、移動秤ユニット14周辺の清掃、特に、水薬が飛散等した際の清掃処理を容易にできるようになっている。
移動秤ユニット14は、投薬瓶110が載置される秤台34と、当該秤台34ごと投薬瓶110を水平移動させるXYテーブル36と、に大別される。XYテーブル36は、秤台34、ひいては、秤台34に載置された投薬瓶110を水平移動させる搬送手段として機能するもので、秤台34をx方向(奥行き方向)に移動させるX移動機構36xと、当該x移動機構ごと秤台34をy方向(幅方向)に移動させるY移動機構36yと、に大別される。X移動機構36xおよびY移動機構36yは、いずれも周知の公知技術により構成できるため、ここでの詳説は省略するが、各移動機構36x,36yは、例えば、駆動源であるモータや、当該モータの駆動力を直線運動に変換するタイミングベルトやリードスクリューなどの動力変換部材、秤台34の移動方向をガイドするガイド部材などで、構成することができる。
図11は、秤台34の断面図である。秤台34は、このXYテーブル36により水平方向に移送される台で、その上には、後に詳説するアダプタ38にセットされた投薬瓶110が載置される。この秤台34には、ロードセル70が組み込まれており、載置された投薬瓶110の重量、ひいては、投薬瓶110に吐出された水薬量を検出する検出手段として機能する。
より具体的に説明すると、この秤台34は、X移動機構36xに連結される連結台62を有している。この連結台62の上面には、支持軸64と、当該支持軸64に挿通された圧縮コイルバネ66と、が立脚設置されている。圧縮コイルバネ66は、支持軸64に挿通された基板68を付勢支持するもので、基板68を上方向に付勢している。基板68、ひいては、当該基板68上に載置されているロードセル70に、下向きの過大荷重が付加された場合、例えば、秤台34に過大重量物が載置された場合、この圧縮コイルバネ66は、圧縮変形し、当該過大荷重によるロードセル70の故障等を防止する。
ロードセル70は、基板68の上面に二つ設置されており、この二つのロードセル70の上側には、さらに、カバープレート72が載置されている。ロードセル70は、このカバープレート72上に載置された物の重量を検知し、その検知結果を制御部10へと通知する。制御部10は、このロードセル70での検出値に基づいて、投薬瓶110に吐出された水薬量を算出する。そして、算出された水薬量に基づいて、吐出機構(回転ユニット12やポンプ20など)の駆動を制御する。具体的には、制御部10は、水薬吐出前における検出重量値と水薬吐出中における検出重量値との差分値を吐出重量値として算出し、当該吐出重量値が、処方箋データで指示された目標重量値に達した場合には、吐出機構による水薬吐出を終了させる。なお、図12では、二つのロードセル70のみを図示しているが、ロードセル70は、単一でもよいし、三つ以上設けられてもよい。
カバープレート72は、秤台34の一番上側に位置する部材で、アダプタ38にセットされた投薬瓶110は、このカバープレート72の上に載置される。カバープレート72は、軽量の金属板からなる部材で、その四隅は、略コの字状に折り曲げられている。この折り曲げ部は、カバープレート72の外周囲に位置して、飛散した水薬等を受け入れる溝72aとして機能する。秤台34の上面には、雌ネジ(図示せず)が二つ形成されており、投薬瓶110を保持したアダプタ38を接続ボルト(図示せず)を介して固定できるようになっている。
ここで、本実施形態では、この秤台に投薬瓶を載置し、この秤台ごと投薬瓶を移動させることで、投薬瓶を吐出位置に移動させる。換言すれば、本実施形態では、投薬瓶の上に元薬瓶を移動させるのではなく、元薬瓶の下に投薬瓶を移動させている。投薬瓶および秤台は、複数の元薬瓶を保持した回転ユニットに比べると、その重量は遥かに小さい。かかる重量の小さい投薬瓶側を移動させる構成とすることで、投薬瓶側を移動させる従来技術に比して、各部材の移動に要する移動機構を簡易化することができ、より低コストで水薬調剤装置を構成することができる。
また、本実施形態では、水薬の吐出量を重量で取得するようにしている。そのため、液面レベルなどに基づいて水薬吐出量を検出していた従来に比して、より高精度での水薬吐出が可能となる。すなわち、液面レベルに基づく吐出量検知は、液面の揺れや、水薬に含有される気泡、さらに、温度変化に伴う体積変化の影響により誤差が生じやすい。また、量産されている投薬瓶の形状(内径など)にバラツキがあるため、液面レベルに基づいて正確な体積を検出することは困難であった。一方、重量は、液面の揺れや気泡、温度変化などの影響は受けないため、本実施形態のように重量値に基づいて水薬量を検出する構成とすれば、常に、正確な吐出量を検出することができる。そして、結果として、水薬調剤の精度を向上させることができる。
[アダプタ]
アダプタ38は、投薬瓶110の口部110bの高さを規定の基準高さに保った状態で保持する部材である。すなわち、投薬瓶110は、その容量に応じて全長(高さ)が異なっている。調剤処理時、ユーザは、調剤すべき水薬の総量に応じて、適切なサイズの投薬瓶110を選択し、これを秤台34にセットする。このとき、秤台34の上に、直接、投薬瓶110を載置すると、当該投薬瓶110の容量(全長)によって、投薬瓶口部110bの高さ、ひいては、吐出ノズル27と投薬瓶口部110bとの距離が異なってくることになる。その結果、例えば、30ml用投薬瓶のような全長が低い投薬瓶110の場合、吐出ノズル27と、投薬瓶口部110bと、の距離が大きく離れてしまうことになり、水薬の飛散などの問題を生じることになる。
そこで、本実施形態では、昇降自在な昇降台74を備えたアダプタ38で投薬瓶口部110bの高さを調節可能にしている。図12は、このアダプタ38の斜視図である。また、図13(a)は容量が小さい投薬瓶110を、図13(b)は容量が小さい投薬瓶110を、それぞれアダプタ38にセットした様子を示す斜視図である。
アダプタ38は、投薬瓶110の容量(全長)に関わらず、常に、投薬瓶口部110bの高さを規定の基準高さHに保ちつつ、投薬瓶110を保持する部材である。このアダプタ38は、秤台34に連結されるベース板73と、当該ベース板73から立脚する支柱76、支柱76に沿って昇降自在の昇降台74、昇降台74に載置された投薬瓶110の口部110bを挟持するクリップ体78などを備えている。ベース板73には、接続ボルト(図示せず)が挿通される貫通孔73aが形成されており、この接続ボルトを介して、ベース板73は、秤台34に螺合締結される。そして、これにより、ベース板73、ひいては、アダプタ38の位置が固定される。
ベース板73の隅部からは、支柱76が立脚されている。支柱76は、断面略コの字型の部材で、その側面には、昇降台74の昇降をガイドするガイド溝76a、および、昇降台74に設けられた係止爪74aが係止される複数の被係止部75が形成されている。ガイド溝76aは、鉛直方向に延びており、このガイド溝76aには、昇降台74に挿通された移動軸74bが挿入される。ガイド溝76aは、移動軸74bの軸径とほぼ同等の幅を有しており、移動軸74b、ひいては、当該移動軸74bが挿通された昇降台74の鉛直方向への移動、および、移動軸74bを中心とした回動、以外の動作を規制する。
被係止部75は、昇降台74に形成された略クサビ型の係止爪74aが係止される部位で、係止爪74aが挿入される溝75aと、当該溝75aの下端から前方に張り出した傾斜面75bと、を有している。傾斜面75bは、溝75aに挿入された係止爪74aの底面を支持する、換言すれば、傾斜面75bの上に溝75aに挿入された係止爪74aの底面が載置されるような傾斜角度となっている。そして、この傾斜面75bによる係止爪74aの支持、換言すれば、係止爪74aと被係止部75との係止関係により、昇降台74の落下が防止され、昇降台74の高さが維持される。係止爪74aと被係止部75との係止関係は、昇降台74を、移動軸74bを中心として、その前端面を持ち上げる方向に回動させることで解除される。係止関係が解除されると、昇降台74は、ガイド溝76aに沿った昇降が可能となる。
被係止部75は、昇降台74の上に設置された投薬瓶口部110bの高さが規定の基準高さHとなり得る高さで、昇降台74を係止でき得るような高さに設けられている。ここで、昇降台74に載置される投薬瓶110の全長は、容量ごとに異なっている。したがって、載置される投薬瓶110の容量によって、その口部110bが規定の基準高さHとなり得る昇降台74の高さは異なっている。そのため、被係止部75も、選択可能な投薬瓶110の容量、換言すれば、投薬瓶110の全長ごとに複数設けられている。具体的には、本実施形態では、30ml用、60ml用、100ml用、150ml用、200ml用の5種類の投薬瓶110が選択可能となっているため、被係止部75も5つ設けられている。このうち、全長が最も低い30ml投薬瓶に対応する被係止部75が最も高い位置に設けられており、逆に、全長が最も高い200ml用投薬瓶に対応する被係止部75が最も低い位置に設けられている。
支柱76の前面には、各投薬瓶110の容量(全長)ごとに、その口部110bの高さが規定の基準高さHとなり得る昇降台74の高さを示した目盛り76bが付されている。かかる目盛り76bがあることにより、昇降台74高さの調整間違いを低減することができる。
昇降台74は、投薬瓶110が載置される台で、その端部には、一対の係止爪74aが形成されている。各係止爪74aは、既述の被係止部75に係止される爪で、先端に近づくにつれ幅細となる略クサビ型形状となっている。この係止爪74aが、被係止部75に係止されることで昇降台74の落下が防止される。また、係止爪74aの近傍には、ガイド溝76aに挿通される移動軸74bが挿通されている。移動軸74bがガイド溝76aに挿入されることにより、昇降台74は、この移動軸74bを中心とした回動、および、ガイド溝76aに沿った昇降のみが許容される。
支柱76の上端近傍には、昇降台74に載置された投薬瓶110の口部110bを挟持するクリップ体78が設けられている。クリップ体78は、昇降台に載置された投薬瓶を保持する投薬瓶保持手段として機能するもので、一対の挟持片78aや、当該一対の挟持片78aを互いに近づく方向に付勢したバネ(図示せず)などで構成される。このクリップ体78が、投薬瓶口部110bを挟持することで、投薬瓶110の転倒等が防止される。
ここで、このクリップ体78の最大開口(一対の挟持片78aの間隔)は、投薬瓶胴部110aより小さくなっており、投薬瓶胴部110aは、挟持できないようになっている。かかる構成とすることで、誤って昇降台74の高さを高めに設定したとしても、当該誤りをユーザが容易に認識できる。例えば、全長が高めの200ml用投薬瓶を載置する場合には、当然、昇降台74は、低めの高さに調整しておかなければならない。しかし、ユーザが誤って、昇降台74の高さを、200mlに適さない高めの位置に調整したとする。この場合、高めの昇降台74に載置された投薬瓶口部110bは、クリップ体78より上側になり、クリップ体78の近傍には投薬瓶胴部110aが位置することになる。その結果、クリップ体78で投薬瓶110を挟持することはできず、投薬瓶110は、不安定な状態となる。かかる不安定な状態となることで、ユーザは、昇降台74の高さの設定ミスを容易に認識することができ、昇降台74の調整ミスを低減できる。そして、その結果、規定の基準高さHより高くなった投薬瓶口部110bと、他部材との干渉等を防止できる。
また、これまでの説明で明らかなとおり、投薬瓶110が載置される昇降台74の高さが可変なアダプタ38を用いることにより、投薬瓶口部110bの高さを、その容量(全長)に関わらず、常に、規定の基準高さHに保つことができる。そして、その結果、投薬瓶口部110bと吐出ノズル27との距離が過大となって生じる水薬の飛散等を防止することができる。
なお、本実施形態では、昇降台74の高さを段階的にのみ可変な構成としているが、当然、連続的に可変可能な構成としてもよい。また、手動ではなく、自動、例えば、電動駆動などで昇降台74の高さが変更できるようにしてもよい。昇降台74の高さを、自動的に変更できる構成とした場合には、例えば、ユーザにより入力された処方箋データに基づいて算出された調剤すべき水薬総量に基づいて、自動的に最適な投薬瓶110の容量を算出し、さらに、算出された投薬瓶110の容量に応じて、昇降台74を自動的に最適高さに移動させるようにしてもよい。また、投薬瓶110と吐出ノズル27との距離をアダプタ38で調整するのではなく、秤台34や回転ユニット12を昇降自在に構成し、これらの高さを調整することで投薬瓶110と吐出ノズル27との距離を調整するようにしてもよい。
[投薬瓶検査]
次に、投薬瓶110の検査について説明する。投薬瓶110のサイズは、調剤される水薬総量に応じて、適切に選択されるべきである。また、投薬瓶110は、蓋が取り外された状態でセットされなければならない。しかしながら、人的ミスなどに起因して、間違ったサイズの投薬瓶110や、蓋が装着されたままの投薬瓶110がセットされてしまう場合がある。この場合、水薬の溢れや、飛散などの問題が生じる。例えば、200ml分の水薬の調剤を実行する際に、誤って100ml用の投薬瓶110をセットすると、調剤処理(水薬吐出処理)の途中で、当該投薬瓶110から水薬が溢れ出してしまう。また、蓋を装着した状態で、投薬瓶110をセットすると、当然ながら、吐出された水薬は、投薬瓶110に入り込まず、その周囲に飛散してしまう。そこで、本実施形態では、水薬吐出の実行前に、セットされている投薬瓶110の良否を検査するようにしている。これについて図2および図14を用いて詳説する。図14は、蓋用センサ42およびサイズ用センサ40の設置位置を説明する図で、図2におけるA方向視図である。
調剤処理前、秤台34は、所定の待機位置Sで待機している(図2参照)。ユーザは、この待機位置Sに位置している秤台34の上に、投薬瓶110を保持したアダプタ38をセットする。調剤処理が開始されると、秤台34は、載置された投薬瓶110ごと水平移動し、吐出入口80を経由して、回転ユニット12の真下空間である吐出空間Rに進入いていく。そして、投薬瓶110を必要な元薬瓶100の真下位置へと移動させ、水薬の吐出を実行させる。
本実施形態では、この吐出空間Rと待機位置Sとの間に位置する吐出入口80近傍に、蓋用センサ42およびサイズ用センサ40を設け、この二つのセンサ42,40での検知結果に基づいて、投薬瓶110の良否を判断している。
蓋用センサ42は、検査用光線L1を照射し、その検査用光線L1の反射光の状態に基づいて、物体の有無や物体までの距離などを検出する光学センサである。この蓋用センサ42は、図14に図示するように、吐出入口80の上端、換言すれば、投薬瓶110の移動経路の真上位置に設置されている。そして、蓋用センサ42は、その真下を通過する投薬瓶110に向かって上側から検査用光線L1を照射する。このとき、投薬瓶110に蓋が装着されている場合には、当該検査用光線L1は、蓋の表面に当接し、反射する。この反射光を受光すれば、蓋用センサ42は、その旨を示す電気信号を制御部10に出力する。当該信号を受信した制御部10は、投薬瓶110に蓋が装着されていると判断する。蓋が装着された状態では、水薬の調剤処理は適切に実行できないため、この場合、制御部10は、エラーを出力し、現在、実行しようとしている調剤処理を中断する。
サイズ用センサ40(40a,40b)も、蓋用センサ42と同様に、検査用光線L2,L3を照射し、その検査用光線L2,L3の反射光の状態に基づいて、物体の有無や物体までの距離などを検出する光学センサである。このサイズ用センサ40は、投薬瓶110のサイズの良否判断のために設けられており、吐出入口80の側端、換言すれば、投薬瓶110の移動経路に対して水平方向にずれた位置に設置されている。本実施形態では、サイズ用センサ40として、二つのセンサ、すなわち、第一サイズ用センサ40aおよび第二サイズ用センサ40bを設けている。
第一サイズ用センサ40aは、投薬瓶口部110bの高さの良否判断のために設けられているセンサである。この第一サイズ用センサ40aは、アダプタ38のクリップ体78より僅かに下側の位置に検査用光線L2を照射し、そのとき得られる反射光の状態に基づいて、投薬瓶110の口部110bがクリップ体78近傍まで達しているか否かを検出する。検出の結果、投薬瓶口部110bがクリップ体78近傍まで達していない場合、制御部10は、本来セットされるべき投薬瓶110より小さい投薬瓶110がセットされていると判断する。この場合、制御部10は、エラーを出力し、調剤処理を終了する。
第二サイズ用センサ40bは、昇降台74の高さの良否判断のために設けられているセンサである。第二サイズ用センサ40bは、アダプタ38の昇降台74に対して検査用光線L3を照射し、そのとき、得られる反射光の状態に基づいて昇降台74の高さを検出する。ここで、昇降台74の高さは、複数段階に調整可能である。そのため、第二サイズ用センサ40bは、選択可能な昇降台の高さの数分だけ複数設けられている。制御部10は、この第二サイズ用センサ40bで検出された昇降台74の高さが適切であるか否かを判断する。すなわち、制御部10は、予め、ユーザにより入力される処方箋データに基づいてセットすべき投薬瓶110のサイズ、および、当該投薬瓶110のサイズに対応する昇降台74の高さを目標高さとして、算出しておく。そして、第二サイズ用センサ40bで検出された昇降台74の高さが、算出された目標高さに一致するか否かを判断する。判断の結果、両者が一致しない場合、制御部10は、昇降台74の高さが不適切であると判断する。この場合、制御部10は、エラーを通知し、調剤処理を終了させる。なお、本実施形態では、高さ可変の昇降台74に対応するために、複数の第二サイズ用センサ40bを設けているが、第二サイズ用センサ40bを移動可能とすれば、第二サイズ用センサ40bは複数ではなく単一であってもよい。第二サイズ用センサ40bを単一とした場合には、昇降台74の高さ検出に先立って、当該第二サイズ用センサ40bを、処方箋データから算出される目標高さに移動させるようにしておけばよい。
このように、水薬の吐出に先立って、蓋の有無、および、投薬瓶のサイズの良否(口部の高さの良否および昇降台の高さの良否)を判断することにより、不適切な投薬瓶をセットしたことにより生じる水薬の溢れや、飛散等を確実に防止できる。なお、ここで説明した投薬瓶110の検査方法は、一例であり、適宜、変更、あるいは、省略されてもよい。
[元薬瓶管理]
次に、この水薬調剤装置で行われている元薬瓶100の管理について説明する。既述したとおり、本装置では、各回転ユニット12ごとに三つ、合計で九つの元薬瓶100がセットされる。記憶部22には、各水薬の特性を示す特性情報テーブルと、この九つの元薬瓶100のセット位置を示す位置情報テーブルと、が記憶されている。図15(a)および図15(b)は、それぞれ、特性情報テーブル82および位置情報テーブル84の一例である。特性情報テーブル82には、各水薬の比重や、粘性、攪拌の要否、消費期限、混在が禁止されている水薬種類など、水薬の吐出処理や品質管理に必要な情報が記憶されている。位置情報テーブル84には、元薬瓶100のセット位置と、当該セット位置にセットされるべき水薬種類と、が対応付けられて記憶されている。この特性情報テーブル82や位置情報テーブル84は、ユーザが操作部18を操作することで作成されるようにしてもよいし、ネットワークなどを介して外部のコンピュータから送信されるようにしてもよい。
水薬調剤処理を実行する際、制御部10は、この特性情報テーブル82や、位置情報テーブル84を参照して、各種バルブ26,28の開閉制御や、XYテーブル36の駆動等を制御する。具体的には、制御部10は、ユーザが入力した処方箋データを解釈し、調剤処理に必要な水薬種類を特定する。そして、位置情報テーブル84を参照して、この特定された水薬が、回転ユニット12にセットされているか否か、また、セットされている場合には、各水薬の位置を確認する。調剤に必要な水薬がセットされていない場合、制御部10はエラーを出力し、調剤処理を中止する。一方、必要な水薬が全て、回転ユニット12にセットされている場合、制御部10は、特性情報テーブル82に記録されている各水薬の比重に基づいて、各水薬ごとに体積で指示された目標吐出量を、重量に変換する。また、必要に応じて各水薬の粘性や攪拌の要否も確認し、吐出動作の制御に利用する。
ところで、元薬瓶100に貯留されている水薬が無くなった場合や、消費期限に達した場合、ユーザは、元薬瓶100を新しい元薬瓶100に交換する。この交換の際に、元薬瓶100のセット位置を間違えると、正確な調剤が行えず、大きな問題となる。例えば、水薬aがセットされるべき右奥側に、誤って水薬bがセットされると、水薬aを吐出するつもりで、水薬bが吐出されてしまうことになる。かかる元薬瓶100のセット位置の間違いを防止するために、本実施形態では、バーコードを利用して、各元薬瓶100のセット位置を確認している。これについて図16を参照して詳説する。図16(a)は、進出状態における回転ユニット12周辺の概略上面図であり、図16(b)は、図16(a)における概略B方向視図である。
既述したとおり、元薬瓶100の保持手段として機能する回転ユニット12は、当該元薬瓶100の並び方向に進退自在となっている。元薬瓶100を交換する際には、この回転ユニット12を、保持している三つの元薬瓶100全てが外部に露出する進出位置まで進出させ、元薬瓶100を交換する。元薬瓶100の交換が終了すれば、回転ユニット12を退避させ、元の位置に戻す。
この回転ユニット12が進退する進退通路23のうち、回転ユニット12で保持された元薬瓶100に対向する面であって、進出状態の回転ユニット12の後端の近傍位置(進退通路23の出口近傍位置)には、バーコードリーダ24が設置されている。このバーコードリーダ24は、元薬瓶100や保持バー52の貼着板52cに貼着されたバーコード102,54を順次、読み取る読取手段として機能する。
このバーコードリーダ24は、規定の位置に固定設置されているが、回転ユニット12の進退動作と連動することで、単一でありながら、複数のバーコード102,54を順次、読み取ることができる。すなわち、回転ユニット12が進退すると、元薬瓶100や貼着板52cに貼着されたバーコード102,54が、順次、バーコードリーダ24の正面を通過していくことになる。この正面を通過していくバーコード102,54を順次読み取ることで、固定設置された単一のバーコードリーダ24であっても、複数のバーコード102,54を読み取ることができる。換言すれば、本実施形態によれば、複数のバーコード102,54を読み取るために、複数のバーコードリーダを設けたり、単一のバーコードリーダを移動させる移動機構を設けたりする必要がない。その結果、比較的、簡易、かつ、安価な構成で、元薬瓶の種類や位置に関する情報を取得することができる。
制御部10は、このバーコードリーダ24での読取結果に基づいて、各元薬瓶100に収容されている水薬種類、および、そのセット位置を判断する。そして、その判断結果と、記憶部22に記憶されている位置情報テーブル84との比較に基づいて、元薬瓶100のセット位置の良否を判断する。セット位置が誤っていると判断した場合、制御部10は、エラーを通知し、再度の元薬瓶100の交換をユーザに促す。このエラーの通知態様としては、様々なものが考えられるが、例えば、各回転ユニット12のカバーにLEDなどの発光体83を設けておき、元薬瓶100が誤ってセットされた場合には、当該発光体83を点灯させるようにしてもよい。また、別の態様としては、表示器16aに誤ってセットされた元薬瓶100の位置を示す図などを表示するようにしてもよい。いずれにしても、本実施形態によれば、元薬瓶100をセットした時点で、各元薬瓶100のセット位置の良否が判断される。その結果、調剤処理の開始前に、当該調剤に必要な水薬がセットされているか否かを確実に判断することができる。
なお、本実施形態では、予め記憶されている位置情報テーブル84との比較に基づいて、元薬瓶100のセット位置の良否を判断しているが、バーコードリーダ24での読取結果に基づいて位置情報テーブル84を修正するようにしてもよい。例えば、水薬aがセットされるべき、右奥に水薬dがセットされた場合には、エラーを出力するのではなく、記憶部に記憶されている位置情報テーブル84の内容を修正するようにしてもよい。そして、水薬調剤処理を行なう場合には、この修正後の位置情報テーブル84に基づいて、調剤に必要な水薬の有無や位置確認を行なうようにしてもよい。
ところで、本実施形態では、水薬種類を示す薬種類用バーコード102だけでなく、位置を示す位置用バーコード54も設けている。これは、セットされる元薬瓶100がセット可能数未満の場合でも、確実に各元薬瓶100の位置を把握するためである。すなわち、元薬瓶100のセット可能数が三つである回転ユニット12に、三つの元薬瓶100がセットされている場合には、位置用バーコード54が無くても、薬種類用バーコード102の読取順序から元薬瓶100の並び順序を判断できるため、各元薬瓶100の位置を把握できる。一方、元薬瓶100のセット可能数が三つの回転ユニット12に、一つの元薬瓶100しかセットされない場合、薬種類用バーコード102に基づいて、当該一つの元薬瓶100の水薬種類は判断できるが、そのセット位置が、回転ユニット12の奥側なのか手前側なのか、それとも、真ん中なのか、を判断することはできない。
本実施形態では、かかる問題を解決するために、元薬瓶100に貼着された薬種類用バーコード102だけでなく、貼着板52cに貼着された位置用バーコード54も読み取るようにしている。これにより、元薬瓶100のセット数がセット可能数未満であっても、確実に、各元薬瓶100のセット位置を把握することができる。
なお、本実施形態では、水薬の種類や位置の識別子としてバーコードを利用しているが、バーコードに代えて、他の識別子、例えば、ICタグなどを利用してもよい。また、ここで説明した元薬瓶100の管理方法は一例であり、適宜、変更、あるいは、省略されてもよい。
[調剤制御]
次に、この水薬調剤装置を用いて、実際に、調剤処理を行う場合の流れについて説明する。図17は、調剤処理の流れを示すフローチャートである。調剤処理を実行する場合、まず、ユーザは、調剤すべき水薬種類と、その容量(体積)を、処方箋データとして水薬調剤装置に入力する(S10)。制御部10は、入力された調剤データと、記憶部22に記憶されている位置情報テーブルと、を比較し、調剤に必要な水薬(元薬瓶)の位置を特定する(S12)。なお、調剤に必要な元薬瓶100が回転ユニット12にセットされていない場合、制御部10は、エラーを出力して、調剤処理を終了する。なお、このとき、調剤処理を終了するのではなく、調剤に必要な複数の水薬のうち、回転ユニット12にセットされている水薬に関する吐出作業のみを実行し、セットされていない水薬に関しては手作業で行う旨のメッセージをユーザに通知するようにしてもよい。
水薬の位置が確認できれば、続いて、制御部10は、吐出すべき水薬の目標重量を算出する(S12)。すなわち、通常、処方箋では、調剤する水薬の量は、体積で指示される。制御部10は、記憶部22に記憶されている特性情報テーブル82を参照して、体積で指示された水薬量を重量に変換し、目標重量として記憶部22に一時記憶させる。その後、制御部10は、ユーザから、調剤開始の指示がなされるまで、待機する(S14)。
一方、ユーザは、処方箋データを入力すれば、続いて、調剤される水薬総量に応じたサイズの投薬瓶110をアダプタ38にセットし、秤台34に載置する。このとき、ユーザは、アダプタ38の昇降台74の高さを、投薬瓶110の全長に応じた高さに調整し、投薬瓶110の口部110bをクリップ体78で挟持させる。また、投薬瓶110の蓋は事前に取り外しておく。投薬瓶110のセットが完了すれば、ユーザは、操作部18を操作して、吐出処理の開始を指示する。
この指示を受けた制御部10は、XYテーブル36を駆動して、秤台34、ひいては、投薬瓶110を回転ユニット12の真下空間である吐出空間Rまで移動させる。この移動の際、投薬瓶110は、蓋用センサ42やサイズ用センサ40が設置された吐出入口80を経由する。投薬瓶110が吐出入口80まで移動すれば、両センサ40,42は、それぞれ、検出光を投薬瓶110に向かって照射し、蓋の有無等を検出する。制御部10は、その検出結果に基づいて、投薬瓶110の良否を判断する(S16)。すなわち、蓋用センサ42での検知結果に基づいて蓋の有無を、サイズ用センサでの検知結果に基づいて投薬瓶110のサイズの良否を判断する。判断の結果、蓋が装着されている、あるいは、投薬瓶110のサイズが不適であると判断した場合、制御部10は、エラーを出力し、調剤処理を終了する(S24)。
一方、適切な投薬瓶110がセットされていると判断した場合、制御部10は、XYテーブル36を駆動して、投薬瓶110を、調剤すべき水薬を貯留した元薬瓶100の真下位置である吐出位置まで移動させる(S18)。投薬瓶110が、吐出位置まで移動すれば、各種バルブ26,28や回転ユニット12等を駆動して、水薬の吐出処理を開始する(S20)。
図18は、この吐出処理の詳細な流れを示すフローチャートである。また、図19は、吐出処理の様子を示すイメージ図である。水薬を吐出する場合、制御部10は、まず、大気圧開放バルブ31および吐出バルブ26を閉鎖するとともに、当該吐出に関わる元薬瓶100に対応する切替バルブ28を開放する(S26)。これにより、吐出に関わる元薬瓶100とポンプ20とが接続される。
続いて、回転ユニット12に設けられた回転機構48を駆動して、回転板44を略180度回転させ、元薬瓶100を転倒させる(S28)。この転倒により、元薬瓶100に貯留されている水薬は、攪拌される。その結果、沈殿物含有の水薬や、比重の異なる二液混合タイプの水薬のように事前の攪拌が必要な水薬も、攪拌された、換言すれば、吐出に適した状態にすることができる。なお、当然ながら、水薬の種類によっては、一回の転倒動作だけでは、十分に攪拌されない場合もあり得る。その場合には、転倒動作と、元薬瓶100を正姿勢に戻す復帰動作と、を繰り返し行えばよい。また、本実施形態では、投薬瓶110の移動後、換言すれば、水薬を実際に吐出する直前に、元薬瓶100を転倒させているが、この順序は逆、または、同時であってもよい。すなわち、元薬瓶100を転倒させた後、あるいは、転倒させている間に投薬瓶110を移動させてもよい。また、転倒以外の攪拌手段(例えば振動発生手段など)を設けた場合、あるいは、元薬瓶100に貯留されている水薬について攪拌が不要な場合には、元薬瓶100を回転ユニット12にセットした時点で転倒、換言すれば、元薬瓶100を常時、転倒状態で待機させるようにしてもよい。
ここで、元薬瓶100が転倒すると、当然ながら、当該元薬瓶100に貯留されている水薬は、元薬瓶口部100b方向に移動し、元薬瓶100の底部近傍には、空間が形成される(図19参照)。そして、元薬瓶100の底部近傍まで挿通されているエアノズル29の先端(正姿勢では下端に相当)は、水薬の液面から突出することになる。したがって、転倒状態においては、エアノズル29から吐出されるエアは、空間中に放出されることになり、水薬中にエア放出することにより生じる気泡を防止できる。
また、吐出ノズル27は、元薬瓶口部100bに装着された特殊キャップ25から突出形成されている。換言すれば、吐出ノズル27は、元薬瓶100の上端(転倒状態では下端に相当)から延びているといえる。そのため、転倒状態においては、水薬の残量が少なくなったとしても、吐出ノズル27の先端(正姿勢では下端に相当)は、水薬の液中に位置することになる。その結果、貯留されている水薬量が少なくなったとしても、吐出ノズル27を通じての水薬吐出が可能となる。
元薬瓶100が転倒すれば、続いて、制御部10は、ポンプ20を駆動し、元薬瓶100にエアを供給する(S30)。このエアにより、元薬瓶100の内部は、加圧された状態となる。この加圧により、粘性の高い水薬であっても、容易に吐出可能となる。また、加圧することにより、転倒動作時に、エアノズル29に進入した微量の水薬を、エアノズル29の外部に放出できる。なお、このときの加圧量は、吐出する水薬の粘性等に応じて可変させてもよい。すなわち、粘性の高い水薬は、粘性の低い水薬に比して、吐出されづらいため、粘性の高い水薬は、粘性の低い水薬に比して、加圧量を大きくし、より吐出されやすい状態にするようにしてもよい。なお、この加圧処理は、元薬瓶100の転倒前に行われてもよいが、転倒動作時にエアノズル29に水薬を放出することを考えれば、転倒後に行われるほうが望ましい。
加圧が完了すれば、吐出ノズル27に設けられた吐出バルブ26を開放する(S32)。吐出バルブ26の開放に伴い、元薬瓶100に貯留された水薬が吐出ノズル27を通じて吐出される。ここで、吐出の継続に伴い、元薬瓶100の内圧が徐々に低下することになる。そして、当該内圧が大気圧を下回ると、吐出動作が著しく阻害されることになる。そこで、吐出バルブ26の開放から、一定時間経過すれば、エアノズル29に接続された大気圧開放バルブ31を開放する。これにより、元薬瓶100の内圧は、常時、大気圧に保たれるため、潤滑な吐出が可能となる。なお、この大気圧開放バルブ31を通じて侵入する粉塵等は、元薬瓶100の手前側に設けられたフィルタ32で除去される。また、本実施形態では、大気圧開放することで吐出動作の停滞を防止しているが、水薬の吐出により元薬瓶100の内圧が低下したとしても、当該内圧が大気圧を下回らない程度に、目標吐出量に応じて事前に十分に加圧しておくことで、吐出動作の停滞を防止するようにしてもよい。この場合、大気圧開放を行う必要はないため、大気圧開放バルブ31やフィルタ32は省略してもよい。
吐出バルブ26の開放後、制御部10は、秤台34に設けられたロードセル70での検出値に基づいて、水薬の吐出重量を監視する(S34)。このとき、吐出バルブ26が開放されているにも関わらず、ロードセル70での検出値が一定時間、変化しなかった場合、制御部10は、元薬瓶100が空になったと判断する。この場合、制御部10は、表示画面等にメッセージを表示するなどして、ユーザに元薬瓶100の交換を促す。そして、ユーザにより空になった元薬瓶が取り外され、新たな元薬瓶100がセットされれば、制御部10は、再度、吐出動作を再開する。
ロードセル70で検知される吐出重量が、処方箋データに基づいて算出された目標重量に到達すれば、吐出バルブ26を閉鎖する(S36)。ここで、吐出バルブ26は、制御部10が、当該吐出バルブ26に対して閉鎖信号を出力することで閉鎖されるが、この閉鎖信号は、吐出重量が目標重量に到達する前に出力される。これは、吐出バルブ26の応答時間を考慮するためである。これについて図20を用いて簡単に説明する。図20は、水薬の吐出重量と経過時間との関係を示すグラフである。
通常、制御部10が閉鎖信号を出力してから実際に吐出バルブ26が閉鎖されるまでの間には、僅かな時間、いわゆる応答時間ΔTが存在する。この応答時間ΔTの間、吐出バルブ26は閉鎖されていないため、当然、水薬の吐出は継続される。したがって、吐出重量が目標重量Mpに達した時点taで、閉鎖信号を出力すると、応答時間ΔTの間に吐出される水薬重量ΔM分だけ余分に吐出されることになり、結果として、総吐出重量が目標重量を超過することになる。
そこで、本実施形態では、予め、吐出バルブ26の応答時間ΔT、および、当該応答時間ΔTで吐出される水薬重量ΔMを測定しておく。そして、ロードセル70で検出される吐出重量が、目標重量Mpから応答吐出重量ΔMを引いた値(Mp−ΔM)に達した時点tbで、閉鎖信号を出力するようにしている。このように応答時間ΔTを考慮して早めに閉鎖信号を出力することにより、水薬吐出処理の精度をより向上できる。なお、当然であるが、吐出バルブ26の種類が同じであれば応答時間ΔTは、水薬種類に関わらずほぼ同じであるが、応答時間ΔTで吐出される水薬重量ΔMは、水薬の種類、特に、粘性によって異なってくる。具体的には、粘性の低い水薬は、粘性の高い水薬に比して、応答時間ΔTで吐出される水薬重量ΔMは、大きくなる。したがって、閉鎖信号を出力する際の重量値であるMp−ΔMは、水薬の種類に応じて異ならせることが望ましい。なお、当然ながら、要求される精度によっては、吐出重量が目標重量に達した時点で閉鎖信号を出力、換言すれば、吐出バルブ26の応答時間ΔTは考慮しなくてもよい。
再び、図18を参照して、吐出処理の流れを説明する。吐出バルブ26が閉鎖されれば、制御部10は、ポンプ20等を駆動して、吐出ノズル27に残存する水薬を元薬瓶100に戻す。具体的には、大気圧開放バルブ31を閉鎖した状態で、ポンプ20を駆動し、元薬瓶100の内部のエアを吸引する(S38)。これにより、元薬瓶100の内圧が低下する。そして、その状態で、吐出バルブ26を短時間、開放すると、内外気圧差に起因して、吐出ノズル27に残存する水薬が元薬瓶100の内部に退避する(S40)。その後は、吐出バルブ26を閉鎖し、回転ユニット12を回転させて、元薬瓶100を正姿勢に戻す(S42)。このとき、吐出ノズル27に残存していた水薬は、元薬瓶100に戻されているため、転倒時に、残存水薬の飛散等が生じることはない。
以上の手順で、一種類の水薬の吐出動作が終了すれば、制御部10は、続いて、ステップS22(図17参照)へ進み、全ての調剤処理が終了したか否かを判断する。すなわち、調剤処理では、複数種類の水薬の吐出が要求されるが、この指定された全種類の水薬吐出が終了したか否かを判断する。まだ吐出されていない水薬がある場合には、ステップS18に戻り、ステップS20の吐出処理を繰り返す。一方、指定された全種類の水薬吐出が終了した場合には、調剤処理は、終了となる。この場合、制御部10は、XYテーブル36を駆動して、秤台34、ひいては、投薬瓶110を待機位置Sに戻す。
以上の説明から明らかなとおり、本実施形態によれば、複数の元薬瓶100を連動して転倒させるため、元薬瓶100の転倒に要するモータや伝達機構の個数を低減することができる。そして、その結果、より簡易な構成で適切な調剤が可能となる。
また、他の好適な態様では、秤台および搬送機構は、ユニット化されて引き出し自在のトレー上に設置されている。秤台の外周縁には、飛散した水薬を受け付ける溝部が形成されていることも望ましい。
本発明に係る水薬調剤装置は、正姿勢でセットされた複数の元薬瓶を回転させてそれらを転倒姿勢にし、これにより前記複数の元薬瓶を転倒姿勢で待機させる保持手段と、投薬瓶が載置されるとともに、載置された投薬瓶の重量を検出する手段と、前記転倒姿勢で待機している複数の元薬瓶の中から元薬瓶を選択して当該選択された元薬瓶から前記投薬瓶へ水薬が吐出されるようにする手段であって、前記検出された検出重量値に基づいて水薬の吐出制御を行う制御部と、を備える。
望ましくは、前記各元薬瓶にはそれぞれエアノズルが挿通され、前記各エアノズルが前記各元薬瓶の底部近傍まで延びている。
望ましくは、前記各元薬瓶の口部にはそれぞれキャップが装着され、前記各エアノズルは前記各元薬瓶のキャップを挿通し、前記各元薬瓶のキャップにはそれぞれ吐出ノズルが設けられる。
望ましくは、前記投薬瓶のサイズに応じて前記投薬瓶の高さを調整する手段を含み、前記各吐出ノズルに対して前記投薬瓶の高さが調整される。
望ましくは、前記保持手段は吐出前に元薬瓶を回転させてその中の水薬を攪拌する。
続いて、回転ユニット12に設けられた回転機構48を駆動して、回転板44を略180度回転させ、元薬瓶100を転倒させる(S28)。この転倒により、元薬瓶100に貯留されている水薬は、攪拌される。その結果、沈殿物含有の水薬や、比重の異なる二液混合タイプの水薬のように事前の攪拌が必要な水薬も、攪拌された、換言すれば、吐出に適した状態にすることができる。なお、当然ながら、水薬の種類によっては、一回の転倒動作だけでは、十分に攪拌されない場合もあり得る。その場合には、転倒動作と、元薬瓶100を正姿勢(セット時の姿勢)に戻す復帰動作と、を繰り返し行えばよい。また、本実施形態では、投薬瓶110の移動後、換言すれば、水薬を実際に吐出する直前に、元薬瓶100を転倒させているが、この順序は逆、または、同時であってもよい。すなわち、元薬瓶100を転倒させた後、あるいは、転倒させている間に投薬瓶110を移動させてもよい。特に望ましくは、元薬瓶100を回転ユニット12に正姿勢でセットした時点で転倒、換言すれば、元薬瓶100を常時、転倒状態(転倒姿勢)で待機させる。