JP2012152013A - 車両用電動機の制御装置 - Google Patents
車両用電動機の制御装置 Download PDFInfo
- Publication number
- JP2012152013A JP2012152013A JP2011008694A JP2011008694A JP2012152013A JP 2012152013 A JP2012152013 A JP 2012152013A JP 2011008694 A JP2011008694 A JP 2011008694A JP 2011008694 A JP2011008694 A JP 2011008694A JP 2012152013 A JP2012152013 A JP 2012152013A
- Authority
- JP
- Japan
- Prior art keywords
- state
- winding
- switching element
- stator winding
- energization
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004804 winding Methods 0.000 claims description 207
- 238000006243 chemical reaction Methods 0.000 claims description 57
- 230000010363 phase shift Effects 0.000 claims 1
- 230000008859 change Effects 0.000 description 17
- 230000004907 flux Effects 0.000 description 15
- 230000005415 magnetization Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000005611 electricity Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images






Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【解決手段】この発明による車両用電動機の制御装置は、駆動アームの上スイッチング素子により固定子巻線の1つの巻線端子に通電し下スイッチング素子により前記巻線端子とは異なる1つの巻線端子に通電し残りの巻線端子は上スイッチング素子と下スイッチング素子の何れからも通電されない第1の通電状態と、上スイッチング素子により固定子巻線の1つまたは2つの巻線端子に通電し下スイッチング素子により前記1つまたは2つの巻線端子以外の全ての巻線端子に通電する第2の通電状態とを、第1の通電状態にある第1の固定子巻線または第2の固定子巻線における前記残りの巻線端子の電圧に基づいて交互に切り替えるようにしたものである。
【選択図】図6
Description
チ素子により上スイッチ素子と異なる固定子巻線端子の1端子に通電する第1の通電状態
と、駆動アームの上スイッチ素子により固定子巻線端子の1端子または2端子に通電し、下スイッチ素子により上スイッチ素子が通電していない残り全ての固定子巻線端子(2端子または1端子)に通電する第2の通電状態とを有し、前記第1の通電状態と第2の通電
状態とを、電動機の回転子の回転により変化する電気角一周期内で交互に切り替えるように制御するものである。
以下、この発明の実施の形態1による車両用電動機の制御装置について説明する。図1は、この発明の実施の形態1による車両用電動機の制御装置の固定子ドライブ回路の概念図である。図示していない回転子は、永久磁石からなる磁極を備えた回転子、あるいは界磁巻線による磁極を備えた回転子であり得る。図1において、車両用電動機の固定子は、三相Δ結線された巻線U、巻線V、巻線Wからなる第1の固定子巻線13と、三相Δ結線された巻線X、巻線Y、巻線Zからなる第2の固定子巻線14とを有する。第1の固定子巻線13の巻線UとV、VとW、WとUの相互の角度間隔はそれぞれ120[deg]であり、第2の固定子巻線14の各巻線XとY、YとZ、ZとXの相互の角度間隔はそれぞれ120[deg]である。
価である。前記第1の固定子巻線13と第2の固定子巻線14とは、互いに電気角位相30[rad]ずらされて、後述するように同じ通電パターンで制御される。
線13である「UVW側」の各巻線端子(1)、(2)、(3)にそれぞれ接続された第1駆動アーム、第2駆動アーム、第3駆動アームの上スイッチング素子および下スイッチング素子のスイッチ状態を3態様に区分して表示している。また、縦軸の左側下欄には、第2の固定子巻線14である「XYZ側」の各巻線端子(4)、(5)、(6)にそれぞれ接続された第4駆動アーム、第5駆動アーム、第6駆動アームの上スイッチング素子および下スイッチング素子のスイッチ状態を3態様に区分して表示している。
よる駆動力を受けて矢印方向に回転する。
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オン、2→オフ、3→オフ、4→オン、5→オフ、6→オン
[第1の固定子巻線の巻線端子](1)→H電圧、(2)→L電圧、(3)→L電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オン、8→オフ、9→オフ、10→オフ、11→オフ、12→オン
[第2の固定子巻線の巻線端子](4)→H電圧、(5)→中間電位、(6)→L電圧
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オン、2→オフ、3→オフ、4→オン、5→オフ、6→オフ
[第1の固定子巻線の巻線端子](1)→H電圧、(2)→L電圧、(3)→中間電位
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オン、8→オフ、9→オフ、10→オン、11→オフ、12→オン
[第2の固定子巻線の巻線端子](4)→H電圧、(5)→L電圧、(6)→L電圧
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オン、2→オフ、3→オフ、4→オン、5→オン、6→オフ
[第1の固定子巻線の巻線端子](1)→H電圧、(2)→L電圧、(3)→H電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オン、8→オフ、9→オフ、10→オン、11→オフ、12→オフ
[第2の固定子巻線の巻線端子](4)→H電圧、(5)→L電圧、(6)→中間電位
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オフ、2→オフ、3→オフ、4→オン、5→オン、6→オフ
[第1の固定子巻線の巻線端子](1)→中間電位、(2)→L電圧、(3)→H電圧
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オン、8→オフ、9→オフ、10→オン、11→オン、12→オフ
[第2の固定子巻線の巻線端子](4)→H電圧、(5)→L電圧、(6)→H電圧
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オフ、2→オン、3→オフ、4→オン、5→オン、6→オフ
[第1の固定子巻線の巻線端子](1)→L電圧、(2)→L電圧、(3)→H電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オフ、8→オフ、9→オフ、10→オン、11→オン、12→オフ
[第2の固定子巻線の巻線端子](4)→中間電位、(5)→L電圧、(6)→H電圧
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オフ、2→オン、3→オフ、4→オフ、5→オン、6→オフ
[第1の固定子巻線の巻線端子](1)→L電圧、(2)→中間電位、(3)→H電圧
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オフ、8→オン、9→オフ、10→オン、11→オン、12→オフ
[第2の固定子巻線の巻線端子](4)→L電圧、(5)→L電圧、(6)→H電圧
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オフ、2→オン、3→オン、4→オフ、5→オン、6→オフ
[第1の固定子巻線の巻線端子](1)→L電圧、(2)→H電圧、(3)→H電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オフ、8→オン、9→オフ、10→オフ、11→オン、12→オフ
[第2の固定子巻線の巻線端子](4)→L電圧、(5)→中間電位、(6)→H電圧
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オフ、2→オン、3→オン、4→オフ、5→オフ、6→オフ
[第1の固定子巻線の巻線端子](1)→L電圧、(2)→H電圧、(3)→中間電位
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オフ、8→オン、9→オン、10→オフ、11→オン、12→オフ
[第2の固定子巻線の巻線端子](4)→L電圧、(5)→H電圧、(6)→H電圧
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オフ、2→オン、3→オン、4→オフ、5→オフ、6→オン
[第1の固定子巻線の巻線端子](1)→L電圧、(2)→H電圧、(3)→L電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オフ、8→オン、9→オン、10→オフ、11→オフ、12→オフ
[第2の固定子巻線の巻線端子](4)→L電圧、(5)→H電圧、(6)→中間電位
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オフ、2→オフ、3→オン、4→オフ、5→オフ、6→オン
[第1の固定子巻線の巻線端子](1)→中間電位、(2)→H電圧、(3)→L電圧
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オフ、8→オン、9→オン、10→オフ、11→オフ、12→オン
[第2の固定子巻線の巻線端子](4)→L電圧、(5)→H電圧、(6)→L電圧
[第1の電力変換部の上/下スイッチング素子]・・・第2の通電状態
1→オン、2→オフ、3→オン、4→オフ、5→オフ、6→オン
[第1の固定子巻線の巻線端子](1)→H電圧、(2)→H電圧、(3)→L電圧
[第2の電力変換部の上/下スイッチング素子]・・・第1の通電状態
7→オフ、8→オフ、9→オン、10→オフ、11→オフ、12→オン
[第2の固定子巻線の巻線端子](4)→中間電位、(5)→H電圧、(6)→L電圧
[第1の電力変換部の上/下スイッチング素子]・・・第1の通電状態
1→オン、2→オフ、3→オフ、4→オフ、5→オフ、6→オン
[第1の固定子巻線の巻線端子](1)→H電圧、(2)→中間電位、(3)→L電圧
[第2の電力変換部の上/下スイッチング素子]・・・第2の通電状態
7→オン、8→オフ、9→オン、10→オフ、11→オフ、12→オン
[第2の固定子巻線の巻線端子](4)→H電圧、(5)→H電圧、(6)→L電圧
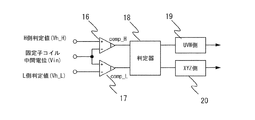
状態を制御して、前述の第1の通電状態から第2の通電状態へ、若しくは第2の通電状態か
ら第1の通電状態への切り替え指令を発生する。
第2の通電状態に変更し、若しくは第2の通電状態から第1の通電状態に変更する。XYZ側通電状態変更手段20は、判定器18からの切り替え指令に基づいて第2の電力変換部140の第4駆動アーム〜第6駆動アームの上スイッチング素子および下スイッチング素子のスイッチングのオン/オフ状態を切り替えて、前述の第2の通電状態から第1の通電状態に変更し、若しくは第1の通電状態から第2の通電状態に変更する。
子は「c状態1(30deg)」へと移行する。これにより、固定子および回転子は「b状態1(30deg)」へと移行する。このように切り替えタイミングが中間電位とH電圧側判定値Vh_Hとの偏差が所定値以下となることより、固定子巻線内の電流が少ないタイミングでの切り替えが達成される。
図7は、この発明の実施の形態2による車両用電動機の制御装置における通電状態の切り替えタイミングを示す説明図であり、(A)は、加速時の切り替えタイミング、(B)は減速時の切り替えタイミングをそれぞれ示している。実施の形態1では、前述したように、UVW側(または、XYZ側)の第1の通電状態終了とほぼ同時に同相側、他相側の両相とも通電状態を更新している。このように通電状態を変更させるタイミングが一定である場合は、回転子の起磁力を回転数に応じて制御することにより回転数を制御することができるが、回転子の起磁力を変えるだけでは、回転子起磁力を介して回転数を制御するため、急な回転の変動に追従できないことがある。
に対応できるように、UVW側とXYZ側の通電状態の切り替えタイミングをずらせるようにしたものである。即ち、電動機を加速させる場合は、回転子15の起磁力を増大させるとともに、図7の(A)に示すように、回転子の起磁力増大が安定するまで、UVW側(またはXYZ側)の第1の通電状態から、他相側であるXYZ側(またはUVW側)の第1の通電状態に移行するタイミングを早めに切り替える。これにより電動機の回転数を急激に増大させて急加速させることができる。
2、4、6、8、10、12 下スイッチング素子
13 第1の固定子巻線 14 第2の固定子巻線
130 第1の電力変換部 140 第2の電力変換部
15 回転子 16 第1の比較器
17 第2の比較器 18判定器
19 UVW側状態変更手段 20 XYZ側状態変更手段
131、132、133、141、143 交流側端子
P、N 直流側端子
(1)、(2)、(3)、(4)、(5)、(6) 巻線端子
Claims (5)
- 直列接続された上スイッチング素子と下スイッチング素子を備えた複数の駆動アームがそれぞれ直流電源の正負端子間に接続され、前記駆動アームの前記上スイッチング素子と前記下スイッチング素子との直列接続点が車両用電動機の固定子巻線の複数の巻線端子にそれぞれ接続された電力変換部を備え、前記駆動アームの前記上スイッチング素子と前記下スイッチング素子のオン、オフを制御して前記車両用電動機の前記固定子巻線の通電を制御して前記車両用電動機の回転子を駆動するようにした車両用電動機の制御装置であって、
前記固定子巻線は、それぞれ三相巻線からなり所定の電気角位相分ずらされて配置された第1の固定子巻線と第2の固定子巻線とを備え、
前記電力変換部は、前記第1の固定子巻線の通電を制御する第1の電力変換部と、前記第2の固定子巻線の通電を制御する第2の電力変換部とを備え、
前記第1の固定子巻線と前記第2の固定子巻線は、前記所定の電気角位相分ずらされて同一の通電パターンとなるように、前記第1の電力変換部と前記第2の電力変換部によりそれぞれ制御され、
前記通電パターンは、第1の通電状態と第2の通電状態とからなり、
前記第1の通電状態は、前記駆動アームの前記上スイッチング素子により前記固定子巻線の1つの巻線端子に通電し、前記下スイッチング素子により前記巻線端子とは異なる1つの巻線端子に通電し、残りの巻線端子は前記上スイッチング素子と前記下スイッチング素子の何れからも通電されない通電状態であり、
前記第2の通電状態は、前記駆動アームの前記上スイッチング素子により前記固定子巻線の1つまたは2つの巻線端子に通電し、前記下スイッチング素子により前記1つまたは2つの巻線端子以外の全ての巻線端子に通電する通電状態であり、
前記第1の通電状態と第2の通電状態とは、前記電動機の回転子の回転により変化する電気角一周期内で交互に切り替えるように、前記第1の電力変換部と前記第2の電力変換部により制御され、
前記第1の通電状態と前記第2の通電状態との切り替えは、前記第1の通電状態にある前記第1の固定子巻線または前記第2の固定子巻線における前記残りの巻線端子の電圧に基づいて行なわれる、
ことを特徴とする車両用電動機の制御装置。 - 前記第1の通電状態と前記第2の通電状態との切り替えは、前記第1の通電状態にある前記第1の固定子巻線または前記第2の固定子巻線における前記残りの巻線端子の電圧値と所定の判定値との偏差が所定値以下となることにより行なわれる、
ことを特徴とする請求項1に記載の車両用電動機の制御装置。 - 前記判定値は、所定の正電圧値と所定の負電圧値とからなり、
前記第1の通電状態にある前記第1の固定子巻線または前記第2の固定子巻線における前記残りの巻線端子の電圧値が正側に増大するときは、その電圧値と前記所定の正電圧値との偏差が所定値以下となることにより、前記第1の通電状態と前記第2の通電状態との切り替えを行ない、
前記第1の通電状態にある前記第1の固定子巻線または前記第2の固定子巻線における前記残りの巻線端子の電圧値が負側に増大するときは、その電圧値と前記所定の負電圧値との偏差が所定値以下となることにより、前記第1の通電状態と前記第2の通電状態との切り替えを行なう、
ことを特徴とする請求項2に記載の車両用電動機の制御装置。 - 前記電動機の加速時に、前記第2の通電状態から前記第1の通電状態への切り替えを、通常時より早いタイミングで行なう、
ことを特徴とする請求項1乃至請求項3のうちの何れか一項に記載の車両用電動機の制御装置。 - 前記電動機の減速時に、前記第1の通電状態から前記第2の通電状態への切り替えを、通常時より遅いタイミングで行なう、
ことを特徴とする請求項1乃至請求項4のうちの何れか一項に記載の車両用電動機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011008694A JP5274587B2 (ja) | 2011-01-19 | 2011-01-19 | 車両用電動機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011008694A JP5274587B2 (ja) | 2011-01-19 | 2011-01-19 | 車両用電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012152013A true JP2012152013A (ja) | 2012-08-09 |
| JP5274587B2 JP5274587B2 (ja) | 2013-08-28 |
Family
ID=46793740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011008694A Expired - Fee Related JP5274587B2 (ja) | 2011-01-19 | 2011-01-19 | 車両用電動機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5274587B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62100191A (ja) * | 1985-10-24 | 1987-05-09 | Mitsubishi Electric Corp | 多重巻線交流電動機の駆動システム |
| JP2006203957A (ja) * | 2004-12-21 | 2006-08-03 | Denso Corp | ターボチャージャアシスト電動機 |
-
2011
- 2011-01-19 JP JP2011008694A patent/JP5274587B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62100191A (ja) * | 1985-10-24 | 1987-05-09 | Mitsubishi Electric Corp | 多重巻線交流電動機の駆動システム |
| JP2006203957A (ja) * | 2004-12-21 | 2006-08-03 | Denso Corp | ターボチャージャアシスト電動機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5274587B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4039458B2 (ja) | 電動機 | |
| JP4685371B2 (ja) | 相対駆動装置 | |
| JP5790447B2 (ja) | 回転力発生装置 | |
| US20090134723A1 (en) | Electric motor device | |
| KR20140051957A (ko) | 모터 제어기 | |
| JP2009148146A (ja) | 電動装置 | |
| JP6262336B2 (ja) | モジュール式多相電動機 | |
| JP2008259302A (ja) | 電動機の制御装置 | |
| US11955919B2 (en) | Electric motor system | |
| JP5151487B2 (ja) | ブラシレスモータ | |
| WO2012090423A1 (en) | Single-phase brushless motor | |
| JP5770701B2 (ja) | ステッピングモータの駆動制御装置 | |
| JP5204554B2 (ja) | モータ | |
| JP2009011145A (ja) | 電動モータの駆動制御回路及びそれを備えた電動モータ | |
| JP6519572B2 (ja) | スイッチトリラクタンスモータの制御装置 | |
| CN111213314B (zh) | 用于起动和运行bldc电机的方法以及bldc电机 | |
| JP5771857B1 (ja) | モータ及びモータ制御方法 | |
| JP2009100526A (ja) | モータ制御装置 | |
| JP5151530B2 (ja) | 電動機 | |
| JP5274587B2 (ja) | 車両用電動機の制御装置 | |
| KR102238456B1 (ko) | 스위치드 릴럭턴스 모터를 구동하는 구동 회로 | |
| JPH11510995A (ja) | 動力及び電力を発生するための回転装置の磁気回路 | |
| JP6528638B2 (ja) | 電子制御装置 | |
| JP2013021814A (ja) | ブラシレスモータおよびこれを備える車両 | |
| KR101393209B1 (ko) | Bldc 듀얼모터장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130514 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5274587 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |