JP2012137368A - 加速度センサ - Google Patents
加速度センサ Download PDFInfo
- Publication number
- JP2012137368A JP2012137368A JP2010289508A JP2010289508A JP2012137368A JP 2012137368 A JP2012137368 A JP 2012137368A JP 2010289508 A JP2010289508 A JP 2010289508A JP 2010289508 A JP2010289508 A JP 2010289508A JP 2012137368 A JP2012137368 A JP 2012137368A
- Authority
- JP
- Japan
- Prior art keywords
- mass body
- acceleration sensor
- acceleration
- mass
- sensor according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001133 acceleration Effects 0.000 title claims abstract description 220
- 238000006073 displacement reaction Methods 0.000 claims abstract description 36
- 239000000758 substrate Substances 0.000 description 52
- 230000035945 sensitivity Effects 0.000 description 18
- 238000001514 detection method Methods 0.000 description 6
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 229910052710 silicon Inorganic materials 0.000 description 4
- 239000010703 silicon Substances 0.000 description 4
- 239000011521 glass Substances 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 239000005357 flat glass Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L29/00—Semiconductor devices specially adapted for rectifying, amplifying, oscillating or switching and having potential barriers; Capacitors or resistors having potential barriers, e.g. a PN-junction depletion layer or carrier concentration layer; Details of semiconductor bodies or of electrodes thereof ; Multistep manufacturing processes therefor
- H01L29/66—Types of semiconductor device ; Multistep manufacturing processes therefor
- H01L29/84—Types of semiconductor device ; Multistep manufacturing processes therefor controllable by variation of applied mechanical force, e.g. of pressure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0808—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate
- G01P2015/0811—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass
- G01P2015/0814—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass for translational movement of the mass, e.g. shuttle type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0851—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration using a plurality of spring-mass systems, each system having a different range of sensitivity to acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0862—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with particular means being integrated into a MEMS accelerometer structure for providing particular additional functionalities to those of a spring mass system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0862—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with particular means being integrated into a MEMS accelerometer structure for providing particular additional functionalities to those of a spring mass system
- G01P2015/0874—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with particular means being integrated into a MEMS accelerometer structure for providing particular additional functionalities to those of a spring mass system using means for preventing stiction of the seismic mass to the substrate
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Ceramic Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Pressure Sensors (AREA)
- Micromachines (AREA)
Abstract
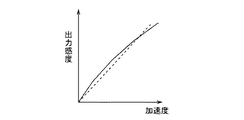
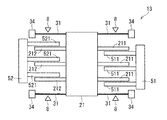
【解決手段】本発明に係る加速度センサは、第一の梁31で保持され加速度により変位可能な第一の質量体21と、第一の質量体21の変位を電気量に変換可能に配置された固定電極51,52と、第一の質量体21の変位が所定の範囲を超えたときに、第一の質量体21の変位容易度に変化をもたらす変位容易度変化部材22,32,8,9とを、備えている。
【選択図】図3
Description
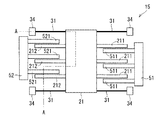
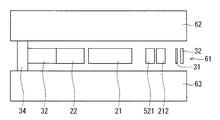
図3は、本実施の形態に係る加速度センサの構成を示す平面図である。また、図4は、図3の切断面線B−Bから見た断面図である。ここで、図3では、図面簡略化のため、支持基板62,63の図示を省略している。
実施の形態1では、第二の質量体22は、第一の質量体21の上下辺に面して、各々1個ずつ配設されていた。本実施の形態では、第一の質量体21の上下辺に面して、各々複数個の第二の質量体22(223,224,225,226)が配設されている。
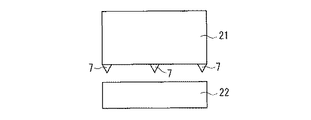
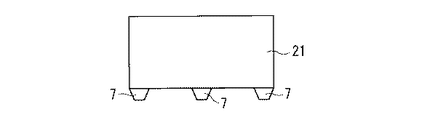
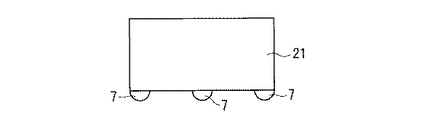
実施の形態1では、第一の質量体21と対面する第二の質量体22の面および第二の質量体22と対面する第一の質量体21の面は、各々平坦であった。本実施の形態では、第一の質量体21と対面する第二の質量体22の面および第二の質量体22と対面する第一の質量体21の面の少なくとも何れか一方に、突起が形成されている。
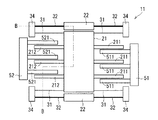
図12は、本実施の形態に係る加速度センサの構成を示す平面図である。
図14は、本実施の形態に係る加速度センサの構成を示す平面図である。
図17は、本実施の形態に係る加速度センサの構成を示す平面図である。
Claims (15)
- 第一の梁で保持され加速度により変位可能な第一の質量体と、
前記第一の質量体の前記変位を電気量に変換可能に配置された固定電極と、
前記第一の質量体の前記変位が所定の範囲を超えたときに、前記第一の質量体の変位容易度に変化をもたらす変位容易度変化部材とを、備えている、
ことを特徴とする加速度センサ。 - 前記変位容易度変化部材は、
第二の梁で保持され加速度により変位可能でし、前記第一の質量体と所定の間隔だけ隔てて配置された第二の質量体である、
ことを特徴とする請求項1に記載の加速度センサ。 - 前記第二の梁および前記第二の質量体は、
複数であり、
各前記第二の質量体は、
各々異なる前記第二の梁により保持されている、
ことを特徴とする請求項2に記載の加速度センサ。 - 各前記第二の質量体は、
同じ質量であり、
各前記第二の梁は、
同じ剛性である、
ことを特徴とする請求項3に記載の加速度センサ。 - 各前記第二の質量体は、
異なる質量であり、
各前記第二の梁は、
異なる剛性である、
ことを特徴とする請求項3に記載の加速度センサ。 - 前記第一の質量体と対面する前記第二の質量体側、または、前記第二の質量体と対面する前記第一の質量体側に、突起が形成されている、
ことを特徴とする請求項2に記載の加速度センサ。 - 前記第二の質量体は、
平面視において、前記第一の質量体を囲繞する、
ことを特徴とする請求項2に記載の加速度センサ。 - 前記第一の梁は、
前記第一の質量体と前記第二の質量体とを結び、
前記第二の梁は、
前記第二の質量体と固定端となるアンカーとを結ぶ、
ことを特徴とする請求項7に記載の加速度センサ。 - 前記第一の梁は、
前記第一の質量体と固定端となる第一のアンカーとを結び、
前記第二の梁は、
前記第二の質量体と固定端となる第二のアンカーとを結ぶ、
ことを特徴とする請求項7に記載の加速度センサ。 - 前記第一の質量体と前記固定電極との間のみにおける、静電容量の変化を検知する、
ことを特徴とする請求項2に記載の加速度センサ。 - 前記固定電極は、
前記第二の質量体の前記変位を電気量に変換可能に配置されており、
前記第一の質量体と前記固定電極との間における静電容量の変化と、前記第二の質量体と前記固定電極との間における静電容量の変化との、両方を検知する、
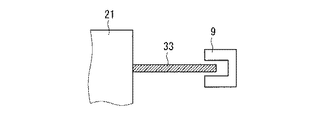
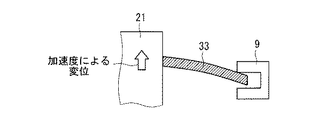
ことを特徴とする請求項2に記載の加速度センサ。 - 前記変位容易度変化部材は、
前記第一の梁の傍に配置された支柱である、
ことを特徴とする請求項1に記載の加速度センサ。 - 前記支柱は、
前記第一の梁の配設方向に沿って、複数配置されている、
ことを特徴とする請求項12に記載の加速度センサ。 - 前記第一の梁は、
前記第一の質量体と固定端となるアンカーとを結び、
一端が、前記第一の質量体と結合した第二の梁を、さらに備えており、
前記変位容易度変化部材は、
前記第二の梁の他端および当該他端付近の前記第二の梁の側面部を囲繞する、梁囲繞部である、
ことを特徴とする請求項1に記載の加速度センサ。 - 前記第二の梁および前記梁囲繞部は、
複数であり、
前記第二の梁の前記他端毎に、前記梁囲繞部が配設されている、
ことを特徴とする請求項14に記載の加速度センサ。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010289508A JP2012137368A (ja) | 2010-12-27 | 2010-12-27 | 加速度センサ |
| TW100127335A TW201234012A (en) | 2010-12-27 | 2011-08-02 | Acceleration sensor |
| US13/197,104 US20120160029A1 (en) | 2010-12-27 | 2011-08-03 | Acceleration sensor |
| CN2011102667285A CN102539829A (zh) | 2010-12-27 | 2011-08-31 | 加速度传感器 |
| DE102011082708A DE102011082708A1 (de) | 2010-12-27 | 2011-09-14 | Beschleunigungssensor |
| KR1020110132621A KR20120074209A (ko) | 2010-12-27 | 2011-12-12 | 가속도 센서 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010289508A JP2012137368A (ja) | 2010-12-27 | 2010-12-27 | 加速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012137368A true JP2012137368A (ja) | 2012-07-19 |
| JP2012137368A5 JP2012137368A5 (ja) | 2013-06-20 |
Family
ID=46315111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010289508A Pending JP2012137368A (ja) | 2010-12-27 | 2010-12-27 | 加速度センサ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20120160029A1 (ja) |
| JP (1) | JP2012137368A (ja) |
| KR (1) | KR20120074209A (ja) |
| CN (1) | CN102539829A (ja) |
| DE (1) | DE102011082708A1 (ja) |
| TW (1) | TW201234012A (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI461692B (zh) * | 2011-12-01 | 2014-11-21 | Nat Univ Tsing Hua | 具有應力隔絕結構之慣性感測器 |
| DE102012109662A1 (de) * | 2012-10-10 | 2014-04-10 | Gtm Gassmann Testing And Metrology Gmbh | Kraftmesseinrichtung |
| WO2016092475A1 (en) | 2014-12-10 | 2016-06-16 | Okulov Paul D | Micro electro-mechanical strain displacement sensor and usage monitoring system |
| CN104502193B (zh) * | 2014-12-12 | 2017-01-25 | 东南大学 | 一种基于纵向梳齿式电容的微梁断裂强度的测试结构 |
| JP6657626B2 (ja) * | 2015-07-10 | 2020-03-04 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| CN105891545A (zh) * | 2016-06-13 | 2016-08-24 | 中国工程物理研究院电子工程研究所 | 一种高精度低g值SOI微加速度计 |
| JP6922552B2 (ja) * | 2017-08-25 | 2021-08-18 | セイコーエプソン株式会社 | 物理量センサー、物理量センサーデバイス、電子機器、携帯型電子機器および移動体 |
| CN109459068A (zh) * | 2018-10-09 | 2019-03-12 | 佛山市卓膜科技有限公司 | 一种高精度压电传感器 |
| IT201900024475A1 (it) * | 2019-12-18 | 2021-06-18 | St Microelectronics Srl | Dispositivo micromeccanico con gruppo elastico a costante elastica variabile |
| US11768220B2 (en) * | 2021-09-09 | 2023-09-26 | Nxp Usa, Inc. | Accelerometer having an over travel stop with a stop gap less than a minimum etch size |
| DE102022200338A1 (de) | 2022-01-13 | 2023-07-13 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanische Sensoreinrichtung |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004286554A (ja) * | 2003-03-20 | 2004-10-14 | Denso Corp | 半導体力学量センサ |
| JP2004286615A (ja) * | 2003-03-24 | 2004-10-14 | Denso Corp | 半導体加速度センサ |
| JP2008008820A (ja) * | 2006-06-30 | 2008-01-17 | Hitachi Ltd | 慣性センサおよびその製造方法 |
| JP2010203859A (ja) * | 2009-03-02 | 2010-09-16 | Toyota Motor Corp | 力学量検出センサ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2862761B1 (fr) * | 2003-11-25 | 2006-02-03 | Thales Sa | Accelerometre differentiel micro-usine multiaxes |
| JP2008190892A (ja) | 2007-02-01 | 2008-08-21 | Hitachi Metals Ltd | 加速度センサおよびそれを用いた電子機器 |
| JP5165294B2 (ja) | 2007-07-06 | 2013-03-21 | 三菱電機株式会社 | 静電容量式加速度センサ |
-
2010
- 2010-12-27 JP JP2010289508A patent/JP2012137368A/ja active Pending
-
2011
- 2011-08-02 TW TW100127335A patent/TW201234012A/zh unknown
- 2011-08-03 US US13/197,104 patent/US20120160029A1/en not_active Abandoned
- 2011-08-31 CN CN2011102667285A patent/CN102539829A/zh active Pending
- 2011-09-14 DE DE102011082708A patent/DE102011082708A1/de not_active Withdrawn
- 2011-12-12 KR KR1020110132621A patent/KR20120074209A/ko active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004286554A (ja) * | 2003-03-20 | 2004-10-14 | Denso Corp | 半導体力学量センサ |
| JP2004286615A (ja) * | 2003-03-24 | 2004-10-14 | Denso Corp | 半導体加速度センサ |
| JP2008008820A (ja) * | 2006-06-30 | 2008-01-17 | Hitachi Ltd | 慣性センサおよびその製造方法 |
| JP2010203859A (ja) * | 2009-03-02 | 2010-09-16 | Toyota Motor Corp | 力学量検出センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120160029A1 (en) | 2012-06-28 |
| TW201234012A (en) | 2012-08-16 |
| KR20120074209A (ko) | 2012-07-05 |
| DE102011082708A1 (de) | 2012-06-28 |
| CN102539829A (zh) | 2012-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012137368A (ja) | 加速度センサ | |
| TWI417547B (zh) | Capacitive sensor | |
| JP4996771B2 (ja) | 電子デバイス | |
| JPH09145740A (ja) | 加速度センサ | |
| JPH10239347A (ja) | 運動センサ | |
| US9739797B2 (en) | Sensor device | |
| JP2016059191A (ja) | 静電型デバイス | |
| JP2005083799A (ja) | 容量式力学量センサ装置 | |
| JP2012163507A (ja) | 加速度センサ | |
| JP2004340716A (ja) | 加速度センサ | |
| TWI379992B (ja) | ||
| JP2008275325A (ja) | センサ装置 | |
| JP2005227089A (ja) | 力学量センサ装置 | |
| US9612254B2 (en) | Microelectromechanical systems devices with improved lateral sensitivity | |
| JP2008292426A (ja) | 静電容量式センサ | |
| JP7365647B2 (ja) | 角速度センサ | |
| JP2010216842A (ja) | 力学量検出センサ | |
| JP2008107300A (ja) | 加速度センサ | |
| JP5141545B2 (ja) | 力学量センサ装置 | |
| JP2005098891A (ja) | 静電容量式センサ | |
| JP2006317182A (ja) | 加速度センサ | |
| JP7123881B2 (ja) | センサ | |
| JP2024126465A (ja) | 加速度センサ | |
| JP2013064667A (ja) | Memsデバイス | |
| JP2008170271A (ja) | 外力検知センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130501 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130501 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131210 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141111 |