JP2012126364A - ブレーキ装置 - Google Patents
ブレーキ装置 Download PDFInfo
- Publication number
- JP2012126364A JP2012126364A JP2010282184A JP2010282184A JP2012126364A JP 2012126364 A JP2012126364 A JP 2012126364A JP 2010282184 A JP2010282184 A JP 2010282184A JP 2010282184 A JP2010282184 A JP 2010282184A JP 2012126364 A JP2012126364 A JP 2012126364A
- Authority
- JP
- Japan
- Prior art keywords
- brake
- brake device
- hydraulic pressure
- pressure
- drive source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Valves And Accessory Devices For Braking Systems (AREA)
- Regulating Braking Force (AREA)
- Braking Systems And Boosters (AREA)
Abstract
【課題】ホイールシリンダのピストンを共用する液圧制動装置とパーキングブレーキ装置とを効率的に制御する技術を提供する。
【解決手段】ブレーキ装置は、ホイールシリンダ内に配設したピストンを共用する液圧制動装置とパーキングブレーキ装置とを有する。状態量取得部300は、液圧回路における状態量を取得する。処理部320は、状態量取得部300により取得された状態量が所定の判定条件を満足するか判定し、所定の判定条件を満たさなければ、特定の状態が発生したことを判定する。処理部320は、パーキングブレーキ装置の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更する。
【選択図】図3
【解決手段】ブレーキ装置は、ホイールシリンダ内に配設したピストンを共用する液圧制動装置とパーキングブレーキ装置とを有する。状態量取得部300は、液圧回路における状態量を取得する。処理部320は、状態量取得部300により取得された状態量が所定の判定条件を満足するか判定し、所定の判定条件を満たさなければ、特定の状態が発生したことを判定する。処理部320は、パーキングブレーキ装置の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更する。
【選択図】図3
Description
本発明は、ブレーキ装置に関し、特にホイールシリンダのピストンを液圧制動装置とパーキングブレーキ装置とで共用するブレーキ装置に関する。
ブレーキペダルの操作量に応じて、液圧マスタシリンダに発生した液圧やアキュムレータに蓄圧された液圧を各車輪のホイールシリンダに供給して常用制動力を発生させる液圧式ディスクブレーキが知られている。この液圧式ディスクブレーキは、液圧により推進するピストンで摩擦パッドをディスクロータに押圧する。また従来より、ホイールシリンダのピストンをパーキングブレーキ装置でも共用することが提案されており、たとえば、ホイールシリンダ外に設けた電動モータを駆動源として作動して、ピストンを制動位置に保持させる駐車ブレーキ機構を備えたディスクブレーキが提案されている(例えば、特許文献1参照)。このディスクブレーキでは、液圧式作動機構によって推進するピストンを機械式作動機構によっても推進可能に構成している。
ビルトインキャリパを備える液圧制動装置では、パーキングブレーキが作動すると、液圧制動装置内の液圧が変動する。すなわち、パーキングブレーキを作動して、ピストンをディスクロータ側に推進させると、推進した分だけ液圧回路内のフルード充填容積が増加するために、液圧回路に設けた液圧センサが検出する液圧は、ブレーキペダル操作量から求められる液圧よりも低くなる。一方で、パーキングブレーキを解除して、ピストンをディスクロータから離れる方向に後退させると、液圧回路内のフルード充填容積が減少するために、液圧センサが検出する液圧は、ブレーキペダル操作量から求められる液圧よりも高くなる。
ブレーキ装置は、液圧回路における液圧を複数のポイントで監視し、検出した液圧がブレーキペダル操作量から導出される適正な範囲から外れていれば、ブレーキ装置の異常を判定して、たとえばブレーキの制御モードを切り替えるなどの処理を実行する。また、ブレーキ装置は、検出した液圧が適正な範囲から外れている場合には、たとえばABSなどの制御を中止することもある。また、マスタシリンダ圧が所定の閾値よりも高くなった場合に、油圧ポンプによるブレーキアシストを行うブレーキ装置においては、液圧センサが検出する液圧が所定の液圧よりも高くなると、ブレーキアシストが実行される。
上記したように、パーキングブレーキの作動や解除により液圧が変動することで、ブレーキ装置においては異常判定処理が作動したりする可能性があるが、このような状況の発生は好ましくない。
本発明は、上述の問題点に鑑み為されたものであり、ホイールシリンダのピストンを共用する液圧制動装置とパーキングブレーキ装置とを効率的に制御する技術を提供することを目的とする。
上記課題を解決するために、本発明のある態様のブレーキ装置は、ホイールシリンダ内に配設した押圧部材を変位させて摩擦材を車輪とともに回転する回転部材に押圧して制動力を発生させるブレーキ装置において、押圧部材を変位させる第1駆動源と、押圧部材を変位させる第2駆動源と、第1駆動源における状態量を取得する状態量取得部と、状態量取得部により取得された状態量が所定の判定条件を満足するか判定し、所定の判定条件を満たさなければ、特定の状態が発生したことを判定する処理部と、を備える。処理部は、第1駆動源の動作中に、第2駆動源の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更する。ホイールシリンダは、液圧回路に連通していてよいが、液圧回路に連通しないものであってもよい。
この態様によると、第1駆動源と第2駆動源を効率的に制御することができ、第2駆動源の動作により、第1駆動源の動作が影響を受けないようにブレーキ装置を制御することができる。
第1駆動源は、ブレーキペダルの操作量に応じてホイールシリンダの液圧を調整する液圧制動装置であり、第2駆動源は、電動モータの動作により駆動力を押圧部材に機械的に伝達するパーキングブレーキ装置であってよい。処理部は、パーキングブレーキ装置の動作開始情報を受け取ると、所定の判定条件を用いた判定処理を変更してもよい。これにより、パーキングブレーキの作動による状態量の変化に、液圧制動装置の動作が影響を受けないようにブレーキ装置を制御することができる。
処理部は、パーキングブレーキ装置の動作解除情報を受け取ると、所定の判定条件を用いた判定処理を変更してもよい。これにより、パーキングブレーキの作動による状態量の変化に、液圧制動装置の動作が影響を受けないようにブレーキ装置を制御することができる。状態量取得部は、液圧回路における液圧を取得する液圧取得部を有してもよい。
処理部は、状態量取得部により取得された状態量が所定の範囲から外れた場合に、当該ブレーキ装置に異常が生じたことを判定する異常判定部を有してもよい。異常判定部は、第2駆動源の動作が開始されたことを検出すると、異常判定処理を所定時間停止してもよい。また異常判定部は、第2駆動源の動作が開始されたことを検出すると、所定の判定条件を所定時間変更してもよい。これにより、第2駆動源の動作にともなう状態量の変化に、第1駆動源の動作が影響を受けないようにブレーキ装置を制御することができる。
処理部は、状態量取得部により取得された状態量が所定の範囲から外れた場合に、当該ブレーキ装置の液圧制御を実行することを判定する液圧制御部を有してもよい。液圧制御部は、第2駆動源の動作が開始されたことを検出すると、液圧制御処理を所定時間停止してもよい。また液圧制御部は、第2駆動源の動作が開始されたことを検出すると、所定の判定条件を所定時間変更してもよい。これにより、第2駆動源の動作にともなう状態量の変化に、第1駆動源の動作が影響を受けないようにブレーキ装置を制御することができる。
この発明により、ホイールシリンダのピストンを共用する液圧制動装置とパーキングブレーキ装置とを効率的に制御する技術を提供できる。
図1は、本発明の実施形態に係るブレーキ装置20を示す系統図である。図1に示すブレーキ装置20は、各車輪に対応して設けられたディスクブレーキユニット21FR、21FL、21RRおよび21RLと、マスタシリンダユニット27と、動力液圧源30と、液圧アクチュエータ40とを備える。マスタシリンダユニット27、動力液圧源30および液圧アクチュエータ40は、液圧回路を構成する。以下、図1を用いてブレーキ装置20の構成について詳述する。
ディスクブレーキユニット21FR、21FL、21RRおよび21RLは、車両の右前輪、左前輪、右後輪、および左後輪のそれぞれに制動力を付与する。マニュアル液圧源としてのマスタシリンダユニット27は、ブレーキ操作部材としてのブレーキペダル24の運転者による操作量に応じて加圧されたブレーキフルードを、ディスクブレーキユニット21FR、21FL、21RRおよび21RL(以下、適宜ディスクブレーキユニット21FR〜21RLと称する)に対して送出することが可能である。動力液圧源30は、モータ等による動力の供給により加圧されたブレーキフルードを、運転者によるブレーキペダル24の操作から独立してディスクブレーキユニット21FR〜21RLに対して送出することが可能である。
液圧アクチュエータ40は、動力液圧源30またはマスタシリンダユニット27から供給されたブレーキフルードの液圧を適宜調整してディスクブレーキユニット21FR〜21RLに送出する。
ディスクブレーキユニット21FR〜21RL、マスタシリンダユニット27、動力液圧源30、および液圧アクチュエータ40のそれぞれについて以下で更に詳しく説明する。各ディスクブレーキユニット21FR〜21RLは、それぞれディスクロータ22と、不図示のブレーキキャリパに内蔵されたホイールシリンダ23FR、23FL、23RRおよび23RLとを含む。そして、各ホイールシリンダ23FR、23FL、23RRおよび23RLは、それぞれ異なる流体通路を介して液圧アクチュエータ40に接続されている。なお以下では適宜、ホイールシリンダ23FR、23FL、23RRおよび23RLを総称して「ホイールシリンダ23」と称するものとする。
ディスクブレーキユニット21FR〜21RLにおいては、ホイールシリンダ23に液圧アクチュエータ40からブレーキフルードが供給されると、ホイールシリンダ23内に配設された押圧部材としてのピストンが液圧により推進されて、車輪と共に回転するディスクロータ22に、摩擦材としてのブレーキパッドが押圧される。これにより、各車輪に制動力が付与される。なお、本実施形態においてはディスクブレーキユニット21FR〜21RLを用いて説明しているが、例えばドラムブレーキ、ドラムインディスクブレーキ、ドラムインドラムブレーキ等のホイールシリンダ23を備える他の制動力付与機構を用いてもよい。
マスタシリンダユニット27は、本実施形態では液圧ブースタ付きマスタシリンダであり、液圧ブースタ31、マスタシリンダ32、レギュレータ33、およびリザーバ34を含む。また、液圧ブースタ31は、ブレーキペダル24に加えられたペダル踏力を増幅してマスタシリンダ32に伝達する。動力液圧源30からレギュレータ33を介して液圧ブースタ31にブレーキフルードが供給されることにより、ペダル踏力は増幅される。そして、マスタシリンダ32は、ペダル踏力に対して所定の倍力比を有するマスタシリンダ圧を発生する。
マスタシリンダ32とレギュレータ33との上部には、ブレーキフルードを貯留するリザーバ34が配置されている。マスタシリンダ32は、ブレーキペダル24の踏み込みが解除されているときにリザーバ34と連通する。なおマスタシリンダ32は、ブレーキペダル24が踏み込まれているときには、リザーバ34との連通は遮断される。一方、レギュレータ33は、リザーバ34と動力液圧源30のアキュムレータ35との双方と連通しており、リザーバ34を低圧源とすると共に、アキュムレータ35を高圧源とし、マスタシリンダ圧とほぼ等しい液圧を発生する。レギュレータ33における液圧を以下では適宜、「レギュレータ圧」という。
動力液圧源30は、ポンプ36およびアキュムレータ35を備える。ポンプ36は、駆動源としてモータ36aを有し、その吸込口がリザーバ34に接続される一方、その吐出口がアキュムレータ35に接続されてブレーキフルードを昇圧する。アキュムレータ35は、ポンプ36により昇圧されたブレーキフルードの圧力エネルギを窒素等の封入ガスの圧力エネルギ、例えば14〜22MPa程度に変換して蓄える蓄圧装置である。
また、アキュムレータ35は、マスタシリンダユニット27に設けられたリリーフバルブ35aにも接続されている。アキュムレータ35におけるブレーキフルードの圧力が異常に高まって例えば25MPa程度になると、リリーフバルブ35aが開弁し、高圧のブレーキフルードはリザーバ34へと戻される。
上述のように、ブレーキ装置20においては、マスタシリンダ32とレギュレータ33とアキュムレータ35とが、ホイールシリンダ23に対するブレーキフルードの供給源となる。また、マスタシリンダ32にはマスタ配管37が、レギュレータ33にはレギュレータ配管38が、アキュムレータ35にはアキュムレータ配管39が接続される。
これらのマスタ配管37、レギュレータ配管38およびアキュムレータ配管39は、それぞれ液圧アクチュエータ40に接続される。つまり、マスタシリンダ32、レギュレータ33およびアキュムレータ35は、ホイールシリンダ23への液圧供給源として液圧アクチュエータ40に各々並列に接続されている。マスタシリンダユニット27、動力液圧源30および液圧アクチュエータ40は、ホイールシリンダ23内に配設したピストンを液圧により変位させて、ブレーキパッドをディスクロータ22に押圧して制動力を発生させる液圧制動装置を構成する。本実施形態において、液圧制動装置は、第1駆動源として機能する。なお、後述するように、液圧アクチュエータ40は、マスタシリンダユニット27または動力液圧源30の一方から供給される液圧をディスクブレーキユニット21に供給する。このため、動力液圧源30と液圧アクチュエータ40の組合せ、およびマスタシリンダユニット27と液圧アクチュエータ40の組合せのそれぞれを、第1駆動源と呼んでもよい。
本実施形態における作動液(ブレーキフルード)供給系統としての液圧アクチュエータ40は、複数の流路が形成されるアクチュエータブロックと、複数の電磁制御弁とを有する。アクチュエータブロックに形成された流路には、個別流路41、42、43および44(以下、適宜個別流路41〜44と称する)と、主流路45とが含まれる。
また、個別流路41〜44は、それぞれ主流路45から分岐されて、対応するディスクブレーキユニット21FR、21FL、21RR、21RLのホイールシリンダ23FR、23FL、23RR、23RLに接続される。個別流路41〜44により、各ホイールシリンダ23は、各々主流路45と独立して連通可能となる。
また、個別流路41、42、43および44の中途には、各々ABS保持弁51、52、53および54(以下、適宜ABS保持弁51〜54と称する)が設けられる。各ABS保持弁51〜54は、ON/OFF制御されるソレノイドおよびスプリングをそれぞれ有しており、何れもソレノイドが非通電状態にある場合に開とされる常開型電磁制御弁である。
開状態とされた各ABS保持弁51〜54は、ブレーキフルードを双方向に流通させることができる。典型的には、主流路45からホイールシリンダ23へとブレーキフルードを供給して液圧を供給することができる。また、逆にホイールシリンダ23から主流路45へもブレーキフルードを流すこともできる。ソレノイドに通電されて各ABS保持弁51〜54が閉弁されると、個別流路41〜44におけるブレーキフルードの流通は遮断され、典型的には液圧の供給が遮断される。
更に、ホイールシリンダ23は、個別流路41〜44にそれぞれ接続された減圧用流路46、47、48および49(以下、適宜減圧用流路46〜49と称する)を介して、リザーバ34へと還流させるリザーバ流路55に接続される。減圧用流路46、47、48および49の中途には、各々ABS減圧弁56、57、58および59(以下、適宜ABS減圧弁56〜59と称する)が設けられる。
また、各ABS減圧弁56〜59は、ON/OFF制御されるソレノイドおよびスプリングをそれぞれ有しており、何れもソレノイドが非通電状態にある場合に閉とされる常閉型電磁制御弁である。各ABS減圧弁56〜59が閉状態であるときには、減圧用流路46〜49におけるブレーキフルードの流通は遮断される。
また、ソレノイドに通電されて各ABS減圧弁56〜59が開弁されると、減圧用流路46〜49におけるブレーキフルードの流通が許容され、ブレーキフルードがホイールシリンダ23から減圧用流路46〜49およびリザーバ流路55を介してリザーバ34へと還流する。これにより、典型的にはホイールシリンダ23の液圧が増圧状態から低減されて減圧状態となる。なお、リザーバ流路55は、リザーバ配管77を介してマスタシリンダユニット27のリザーバ34に接続される。
主流路45は、中途に分離弁60を有する(なお、分離弁を連通弁とも称呼するが、実施形態においては分離弁と称する)。分離弁60により、主流路45は、個別流路41および42と接続される第1流路45aと、個別流路43および44と接続される第2流路45bとに区分けされる。第1流路45aは、個別流路41および42を介して前輪側のホイールシリンダ23FRおよび23FLに接続され、第2流路45bは、個別流路43および44を介して後輪側のホイールシリンダ23RRおよび23RLに接続される。すなわち、分離弁60は、前輪側のホイールシリンダ23FRおよび23FLと、後輪側のホイールシリンダ23RRおよび23RLとを連通/遮断する機能を有する電磁制御弁である。
分離弁60は、ON/OFF制御されるソレノイドおよびスプリングを有しており、ソレノイドが非通電状態にある場合に閉とされる常閉型電磁制御弁である。分離弁60が閉状態であるときには、主流路45におけるブレーキフルードの流通は遮断される。ソレノイドに通電されて分離弁60が開弁されると、第1流路45aと第2流路45bとの間でブレーキフルードを双方向に流通させることができる。
また、液圧アクチュエータ40においては、主流路45に連通するマスタ流路61およびレギュレータ流路62が形成されている。より詳細には、マスタ流路61は主流路45の第1流路45aに接続され、レギュレータ流路62は主流路45の第2流路45bに接続される。また、マスタ流路61は、マスタシリンダ32と連通するマスタ配管37に接続される。レギュレータ流路62は、レギュレータ33と連通するレギュレータ配管38に接続される。
マスタ流路61は、中途にマスタカット弁64を有する。マスタカット弁64は、ON/OFF制御されるソレノイドおよびスプリングを有しており、ソレノイドが非通電状態にある場合に開とされる常開型電磁制御弁である。開状態とされたマスタカット弁64は、マスタシリンダ32と主流路45の第1流路45aとの間でブレーキフルードを双方向に流通させることができる。ソレノイドに通電されてマスタカット弁64が閉弁されると、マスタ流路61におけるブレーキフルードの流通は遮断され、典型的にはマスタシリンダ32から第1流路45aの液圧供給が遮断される。
また、マスタ流路61には、マスタカット弁64よりも上流側において、シミュレータカット弁68を介してストロークシミュレータ69が接続される。すなわち、シミュレータカット弁68は、マスタシリンダ32とストロークシミュレータ69とを接続する流路に設けられる。シミュレータカット弁68は、ON/OFF制御されるソレノイドおよびスプリングを有しており、ソレノイドが非通電状態にある場合に閉とされる常閉型電磁制御弁である。
また、シミュレータカット弁68が閉状態であるときには、マスタ流路61とストロークシミュレータ69との間のブレーキフルードの流通は遮断される。ソレノイドに通電されてシミュレータカット弁68が開弁されると、マスタシリンダ32とストロークシミュレータ69との間でブレーキフルードが双方向に流通できる。
また、ストロークシミュレータ69は、複数のピストンやスプリングを有しており、シミュレータカット弁68の開放時に運転者によるブレーキペダル24の踏力に応じた反力を創出する。ストロークシミュレータ69は、運転者によるブレーキ操作のフィーリングを向上させるために、多段のバネ特性を有することが好ましい。
また、レギュレータ流路62は、中途にレギュレータカット弁65を有する。レギュレータカット弁65も、ON/OFF制御されるソレノイドおよびスプリングを有しており、ソレノイドが非通電状態にある場合に開とされる常開型電磁制御弁である。開状態とされたレギュレータカット弁65は、レギュレータ33と主流路45の第2流路45bとの間でブレーキフルードを双方向に流通させることができる。ソレノイドに通電されてレギュレータカット弁65が閉弁されると、レギュレータ流路62におけるブレーキフルードの流通は遮断され、典型的にはレギュレータ33から第2流路45bへの液圧供給が遮断される。
液圧アクチュエータ40には、マスタ流路61およびレギュレータ流路62に加えて、アキュムレータ流路63も形成される。アキュムレータ流路63の下流側の一端は、主流路45の第2流路45bに接続され、上流側の他端はアキュムレータ35と連通するアキュムレータ配管39に接続される。
アキュムレータ流路63は、中途に増圧リニア制御弁(「リニア増弁」と称する場合もある)66を有する。また、アキュムレータ流路63および主流路45の第2流路45bは、減圧リニア制御弁(「リニア減弁」と称する場合もある)67を介してリザーバ流路55に接続される。増圧リニア制御弁66と減圧リニア制御弁67とは、それぞれリニアソレノイドおよびスプリングを有し、何れもソレノイドが非通電状態にある場合に閉とされる常閉型電磁制御弁である。増圧リニア制御弁66と減圧リニア制御弁67とは、それぞれのソレノイドに供給される電流に比例して弁の開度が調整される。なお、以下の説明においては、増圧リニア制御弁66と減圧リニア制御弁67とを総括して適宜リニア制御弁と称する。
増圧リニア制御弁66は、各車輪に対応して複数設けられた各ホイールシリンダ23に対して共通の増圧用制御弁として設けられている。また、減圧リニア制御弁67も同様に、各ホイールシリンダ23に対する共通の減圧用制御弁として設けられている。つまり、本実施形態においては、増圧リニア制御弁66と減圧リニア制御弁67とが、動力液圧源30から送出される作動流体を、各ホイールシリンダ23へ給排制御する1対の共通の制御弁として設けられる。典型的には増圧リニア制御弁66を開とすれば、アキュムレータ35からの液圧を第2流路45bに供給して、第2流路45bの液圧を増大させることができる。また、典型的には減圧リニア制御弁67を開とすれば、第2流路45bのブレーキフルードを排出して、第2流路45bの液圧を低減することができる。
増圧リニア制御弁66の上流側と下流側との間の差圧(いわゆる出入口間の差圧)は、アキュムレータ35におけるブレーキフルードの圧力と主流路45におけるブレーキフルードの圧力との差圧にほぼ対応する。また、減圧リニア制御弁67の上流側と下流側との間の差圧は、主流路45におけるブレーキフルードの圧力とリザーバ34におけるブレーキフルードの圧力との差圧に対応する。なお現実には、増圧リニア制御弁66の開閉に伴いブレーキフルードが流通する過渡期においては、増圧リニア制御弁66にオリフィス抵抗等に起因する減圧要因が作用する。
また、増圧リニア制御弁66および減圧リニア制御弁67のリニアソレノイドへの供給電力に応じた電磁駆動力をF1とし、スプリングの付勢力をF2とし、増圧リニア制御弁66および減圧リニア制御弁67の出入口間の差圧に応じた差圧作用力をF3とすると、F1+F3=F2という関係が成立する。従って、増圧リニア制御弁66および減圧リニア制御弁67のリニアソレノイドへの供給電力を連続的に制御することにより、増圧リニア制御弁66および減圧リニア制御弁67の出入口間の差圧を制御することができる。
ブレーキ装置20において、動力液圧源30および液圧アクチュエータ40は、本実施形態における電子制御部としてのブレーキECU70により制御される。ブレーキECU70は、CPUを含むマイクロプロセッサとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート等を備える。また、ブレーキECU70は、記憶部として各種プログラム等を書き換え可能なフラッシュメモリ等を備えることとし、ファームアップなどのメンテナンス時にバージョンアップやアップデート可能としてもよい。
そして、ブレーキECU70は、上位のハイブリッドECUなどと通信可能であり、ハイブリッドECUからの制御信号や、各種センサからの信号に基づいて動力液圧源30のポンプ36や、液圧アクチュエータ40を構成する電磁制御弁51〜54、56〜59、60、64〜68を制御して、液圧制動力を制御可能である。
また、ブレーキECU70には、レギュレータ圧センサ71、アキュムレータ圧センサ72、および制御圧センサ73などの液圧センサが接続される。レギュレータ圧センサ71は、レギュレータカット弁65の上流側でレギュレータ流路62内のブレーキフルードの圧力、すなわちレギュレータ圧を所定のサンプリング周期で検知し、検知した値を示すレギュレータ圧検知信号をブレーキECU70に与える。
また、アキュムレータ圧センサ72は、増圧リニア制御弁66の上流側でアキュムレータ流路63内のブレーキフルードの圧力、すなわちアキュムレータ圧を所定のサンプリング周期で検知し、検知した値を示すアキュムレータ圧検知信号をブレーキECU70に与える。
また、制御圧センサ73は、主流路45の第1流路45a内のブレーキフルードの圧力を所定のサンプリング周期で検知し、検知した値を示す信号をブレーキECU70に与える。また、分離弁60が開となって第1流路45aと第2流路45bとが連通している場合には、制御圧センサ73は主流路45内のブレーキフルードの圧力を検知する。各圧力センサ71〜73の検出値は、各々所定時間おき(例えば3ミリ秒毎)にサンプリングされてブレーキECU70に与えられ、ブレーキECU70の所定の記憶領域に所定量ずつ格納保持される。
従って、分離弁60が開状態とされて主流路45の第1流路45aと第2流路45bとが互いに連通している場合、制御圧センサ73の出力値は、増圧リニア制御弁66の低圧側(下流側)の液圧を示すと共に減圧リニア制御弁67の高圧側(上流側)の液圧を示す。このため、制御圧センサ73の出力値を増圧リニア制御弁66および減圧リニア制御弁67の制御に利用することができる。
また、増圧リニア制御弁66および減圧リニア制御弁67が閉鎖されていると共に、マスタカット弁64が開状態とされている場合、制御圧センサ73の出力値は、マスタシリンダ32の液圧(以下、適宜マスタシリンダ圧と称する)を示す。更に、分離弁60が開弁されて主流路45の第1流路45aと第2流路45bとが互いに連通しており、各ABS保持弁51〜54が開放される一方、各ABS減圧弁56〜59が閉鎖されている場合、制御圧センサ73の出力値は、各ホイールシリンダ23に作用する作動流体圧、すなわちホイールシリンダ圧を示す。
ブレーキECU70に接続されるセンサには、ブレーキペダル24に設けられたストロークセンサ25も含まれる。ストロークセンサ25は、運転者によるブレーキペダル24の操作量としてのペダルストロークを検知し、検知したストローク量を示す信号をブレーキECU70に与える。ストロークセンサ25の出力値は、所定時間おきにサンプリングされてブレーキECU70に与えられ、ブレーキECU70の所定の記憶領域に所定量ずつ格納保持される。
なお、ブレーキ操作状態検出手段はストロークセンサ25に限られるものではなく、他のブレーキ操作状態検出手段をストロークセンサ25に加えて、あるいはストロークセンサ25に替えてブレーキECU70に接続して設けてもよい。ブレーキ操作状態検出手段としては、例えばブレーキペダル24の操作力を検出するペダル踏力センサや、ブレーキペダル24が踏み込まれたことを検出するブレーキランプスイッチなどでもよい。また、ブレーキECU70には図示されない車輪速度センサ等も接続され、所定時間おきにサンプリングされた車輪速度の検知信号がブレーキECU70に与えられ、ブレーキECU70の所定の記憶領域に格納保持される。
また、ブレーキ操作入力手段は、ブレーキ操作部材としてのブレーキペダル24に限定されることはなく、例えば押圧ボタンによるブレーキ操作入力手段とすることもできる。押圧ボタンによるブレーキ操作入力手段とした場合においても、押圧ボタンのストローク量の検知に加え、押圧ボタンの操作力を検出する押圧力センサや、押圧ボタンが所定量だけ押し込まれたことを検出する押圧ボタンスイッチなどとしてもよい。
上述のように構成されたブレーキ装置20は、リニア制御モード、ハイドロブースタモードの少なくとも2つの制御モードをとる。リニア制御モードでは、動力液圧源30からブレーキフルードを液圧回路に供給し、ハイドロブースタモードでは、マスタシリンダユニット27からブレーキフルードを液圧回路に供給する。なお、リニア制御モードおよびハイドロブースタモードは、それぞれブレーキフルードの供給源が動力液圧源30およびマスタシリンダユニット27である場合を説明するための例であり、ブレーキ装置20における制御モードを限定する趣旨ではない。
ブレーキECU70は、通常の走行時、リニア制御モードにより制動力を制御する。ブレーキ装置20は、液圧などに何らかの異常が検出された場合には、制御モードをリニア制御モードからハイドロブースタモードに切り替えて、制動力を制御する。ハイドロブースタモードにおいては、運転者のブレーキペダル操作に応じた液圧がホイールシリンダ23に伝達されて制動力を発生させる。
リニア制御モードにおいては、各ホイールシリンダ23が、マスタシリンダユニット27から遮断される。すなわち、ブレーキECU70は、マスタカット弁64およびレギュレータカット弁65を閉状態とし、マスタシリンダ32およびレギュレータ33から送出されるブレーキフルードが主流路45へ供給されないようにする。またブレーキECU70は、シミュレータカット弁68を開状態とする。ブレーキECU70がシミュレータカット弁68を開状態とするのは、運転者によるブレーキペダル24の操作に伴ってマスタシリンダ32から送出されるブレーキフルードが、ストロークシミュレータ69へと供給されるようにするためである。またブレーキECU70は、分離弁60を開状態とする。
リニア制御モードにおいては、ブレーキECU70は、典型的には運転者からブレーキペダル24の踏み込みにより指示された要求制動力から回生制動力を減じることにより、ブレーキ装置20により発生させるべき液圧制動力(典型的には摩擦による制動力)を算出する。回生制動力の値は、ハイブリッドECUからブレーキECU70に付与される。
そして、ブレーキECU70は、算出した液圧制動力に基づいて各ホイールシリンダ23FR〜23RLの目標液圧を算出する。ブレーキECU70は、ホイールシリンダ圧が目標液圧となるように、フィードバック制御則により増圧リニア制御弁66及び減圧リニア制御弁67に対する供給電流の値(増圧指令電流値または減圧指令電流値)を決定する。
その結果、ブレーキ装置20においては、動力液圧源30から増圧リニア制御弁66を介してブレーキフルードが各ホイールシリンダ23に供給されて車輪に所定目標の液圧制動力が付与される。また、ブレーキフルードが各ホイールシリンダ23から減圧リニア制御弁67を介して必要に応じて排出され、車輪に付与される液圧制動力が適宜調整される。このようにして、リニア制御モードにおいては、液圧制動と回生制動とを併用して、要求制動力を発生させるブレーキ回生協調制御が実行される。なお、ブレーキ回生協調制御はハイブリッド車において実行され、ブレーキ装置20において必ずしも実行されなくてもよく、この場合は、ブレーキECU70が、運転者からブレーキペダル24の踏み込みにより指示された要求制動力から、ブレーキ装置20により発生させるべき液圧制動力を算出する。
一方、ハイドロブースタモードにおいては、ブレーキECU70は、通電制御を停止して、マスタカット弁64およびレギュレータカット弁65を開状態とするとともに、分離弁60およびシミュレータカット弁68を閉状態とする。その結果、マスタシリンダ圧が前輪側のホイールシリンダ23FR及び23FLへと伝達され、レギュレータ圧が後輪側のホイールシリンダ23RR及び23RLへと伝達されて各車輪に制動力が付与される。このように本実施形態のブレーキ装置20においては、異常の発生等の理由によりリニア制御モードを実行しない場合の予備的な制御モードとして、ハイドロブースタモードが用いられている。
実施形態で説明するブレーキ装置20は、ビルトインディスクタイプの場合やドラムインドラムタイプである場合等いわゆるビルトインキャリパのように、ブレーキ液圧回路と繋がったパーキングブレーキ装置を備える。実施形態において、パーキングブレーキ装置は、電動モータの動作によりホイールシリンダ23のピストンに駆動力を機械的に伝達して、ピストンを変位させる。本実施形態において、パーキングブレーキ装置は、第2駆動源として機能する。このようにブレーキ装置20では、ホイールシリンダ23のピストンを、第1駆動源(液圧制動装置)と、第2駆動源(パーキングブレーキ装置)とで共用する構成をとる。
図2は、実施形態に係るビルトインタイプのキャリパ200の内部構造を説明する概略構造図である。キャリパ200は、後輪のディスクブレーキユニット21RR、RLに設けられる。
キャリパ200は、車体固定マウント(不図示)に取り付けられ、ディスクロータ22に押圧され制動力を発生するブレーキパッド202と、ブレーキパッド202を押圧するためのピストン214およびホイールシリンダ23を備える。車輪と共に回転するディスクロータ22の側面22a、22bは摩擦摺動面を構成し、一対のブレーキパッド202がディスクロータ22を挟んで対向配置される。このブレーキパッド202は、ディスクロータ22の側面22a、22bと直接接触する摩擦材208と、この摩擦材208の裏側、すなわちディスクロータ22と接触しない側を支持するパッド裏金210によって構成されている。
シリンダハウジング204aには、有底の穴212が穿設されており、この穴212にホイールシリンダ23が形成されて、ピストン214が摺動可能に嵌挿されている。穴212の底にはポート216が設けられ、液圧配管218を介して液圧回路に接続されている。運転者がブレーキペダル24を操作すると第1駆動源からブレーキフルードがポート216内に流入し、ピストン214を駆動するようになっている。
ここで、まずキャリパ200が液圧制動装置により駆動される常用制動部として機能する場合を説明する。ブレーキフルードがポート216内に流入すると、ピストン214が図2に示す非動作状態から、ピストン214がパッド裏金210aを押圧する方向に摺動し、パッド裏金210aを介して摩擦材208aをディスクロータ22の側面22aに押圧する。ブレーキフルードがポート216内にさらに流入することでホイールシリンダ23内の液圧はさらに上昇する。シリンダハウジング204aの非シリンダ形成側には爪部220が形成されており、爪部220がパッド裏金210bを介して摩擦材208bをディスクロータ22の側面22bに押圧する。したがって、ディスクロータ22を一対の摩擦材208a,208bにより押圧挟持する状態となり、ディスクロータ22を効率的に制動させる常用制動力を発生する。
次に、キャリパ200がパーキングブレーキ装置により駆動される駐車制動部として機能する場合を説明する。ピストン214は、断面形状が例えばカップ状に形成され、そのカップ内部にナット部材222が配設されている。このナット部材222は、ねじ機構224を構成する棒ねじ部材224aと螺合しており棒ねじ部材224aの回転により、進退動可能になっている。棒ねじ部材224aの一端は、ホイールシリンダ23の底部から突出してシリンダハウジング204a内に配置された減速ギア224bと接合されている。減速ギア224bは、電動モータ230の出力軸に固定された駆動ギア224cと噛合している。従って、電動モータ230が回転駆動された場合、電動モータ230の回転速度は、駆動ギア224c、減速ギア224b、棒ねじ部材224a、ナット部材222のギア比で定まる減速比で減速される。そして、ナット部材222を棒ねじ部材224aの軸方向に電動モータ230の駆動に応じた速度及び移動量で進退させることができる。以下、ナット部材222をディスクロータ22に向かう方向に移動させる電動モータ230の回転を「正回転」と呼び、反対に、ナット部材222をディスクロータ22から離れる方向に移動させる電動モータ230の回転を「負回転」と呼ぶ。
ねじ機構224および電動モータ230は、パーキングブレーキ装置を構成する。ドライバが、パーキングスイッチ(図示せず)をON操作すると、ブレーキECU70が、パーキングブレーキ装置の動作開始情報を受け取り、電動モータ230に電流を供給することで正回転させて、パーキングブレーキを作動させる。一方、ドライバがパーキングスイッチをOFF操作すると、ブレーキECU70が、パーキングブレーキ装置の動作解除情報を受け取り、電動モータ230に電流を供給することで負回転させて、パーキングブレーキを解除させる。
棒ねじ部材224aがホイールシリンダ23の底部から導出されている部分には、適切なシール構造が設けられ、ホイールシリンダ23内部のブレーキフルードが漏れ出さないような構造になっている。同様に、ホイールシリンダ23とピストン214との間にはもリング状のシール部材226が配置され、ブレーキフルードが漏れ出さないような構造になっている。シール部材226は、ピストン214に対するブレーキフルードやナット部材222による押圧力が解除された場合に、ピストン214をブレーキ解除方向に押し戻す付勢力を発生する機能も有している。
以上のように、ブレーキ装置20では、ホイールシリンダ23内に配設されるピストン214が、液圧制動装置およびパーキングブレーキ装置によって共用される。以下において、本実施形態のブレーキ装置20における液圧制動装置とパーキングブレーキ装置を効率よく制御する方法を説明する。
図3は、ブレーキECU70の機能ブロックを示す。ブレーキECU70は、状態量取得部300および処理部320を備える。状態量取得部300は、ブレーキ装置20における状態量を取得し、液圧センサから検出値を取得する液圧取得部302と、ストロークセンサ25からストローク量を取得するストローク量取得部304とを有する。
処理部320は、ブレーキ装置20における様々な処理および制御を担当する。処理部320は、状態量取得部300により取得された状態量を受け取り、その状態量が所定の判定条件を満足するか否かを判定する。状態量取得部300は、第1駆動源における状態量を取得する。処理部320は、状態量が所定の判定条件を満たしていないことを判定すると、特定の状態が発生したことを判定する。ここで特定の状態とは、たとえばブレーキ装置20に異常が発生している状態や、ABS制御を停止するべき状態、またブレーキアシストを実行するべき状態などを含む。処理部320は、第1駆動源の動作中に、第2駆動源の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更する。このとき処理部320は、所定期間、所定の判定条件を用いた判定処理を中断してもよく、また判定条件を変更して判定処理を実行してもよい。処理部320は、異常判定部322、制御モード決定部324、液圧制御部326およびパーキングブレーキ制御部328を有する。
異常判定部322は、状態量取得部300により取得された状態量が所定の適正な範囲から外れている場合に、ブレーキ装置20に異常が生じたことを判定する。具体的に異常判定部322は、液圧取得部302により取得された液圧と、ストローク量取得部304で取得されたブレーキペダル24のストローク量とが適正な関係にない場合に、ブレーキ装置20に異常が生じたことを判定する。
図4は、ブレーキペダル24のストローク量と液圧センサの検出値の関係を示す。縦軸が液圧センサの出力を示し、横軸がストロークセンサ25の出力を示す。ブレーキ装置20がリニア制御モードで動作している場合、分離弁60が開弁されて主流路45の第1流路45aと第2流路45bとが互いに連通しており、各ABS保持弁51〜54が開放される一方、各ABS減圧弁56〜59が閉鎖されている。したがって、制御圧センサ73は、ホイールシリンダ圧を検出する。またブレーキ装置20がハイドロブースタモードで動作している場合、増圧リニア制御弁66および減圧リニア制御弁67が閉鎖されていると共に、マスタカット弁64が開状態とされているため、制御圧センサ73は、マスタシリンダ32の液圧を検出する。以下、縦軸を制御圧センサ73の出力を示すものとして説明するが、液圧回路に他の液圧センサが設けられている場合には、そのセンサ出力が縦軸に設定されてもよい。
図4において、実線340は、ストローク量と液圧センサ検出値の関係の標準値を示す。破線342は、ストローク量と液圧センサ検出値の上限値を示し、破線344は、ストローク量と液圧センサ検出値の下限値を示す。破線342および344は、ストロークセンサ25や制御圧センサ73の出力特性のばらつきによる上限値および下限値をそれぞれ表現し、正常なストローク量と液圧センサ検出値は、破線342および344で表現される範囲内にプロットされる。図4に示す関係は、ストローク量と液圧センサ検出値とが正常にあるか判定するためのマップとして利用される。
異常判定部322は、ストロークセンサ25の出力値と制御圧センサ73の出力値との関係が破線342および344で囲まれる範囲内にあれば、正常な関係を満たすことを判定する。一方、異常判定部322は、ストロークセンサ25の出力値と制御圧センサ73の出力値との関係が破線342および344で囲まれる範囲から外れていれば、ブレーキ装置20になんらかの異常が生じていることを判定する。この判定により、たとえば液圧センサ(制御圧センサ73)や、ストロークセンサ25に異常が生じている可能性や、液圧回路に漏れが発生している可能性などが推測される。異常判定部322は、異常が生じたことを判定すると、制御モード決定部324に通知する。制御モード決定部324は、リニア制御モードをハイドロブースタモードに切り替え、マスタシリンダユニット27から液圧を直接ホイールシリンダ23に供給するように制御する。以上は、異常判定部322による通常の異常判定処理である。
ブレーキ装置20において、パーキングブレーキ装置はパーキングブレーキ制御部328により制御される。具体的にパーキングブレーキ制御部328は、ドライバがパーキングスイッチをON操作すると、その操作をパーキングブレーキ装置の動作開始情報として受け取り、電動モータ230(図2参照)に正方向の電流を供給して、正回転させる。電動モータ230が駆動されると、棒ねじ部材224aとともにナット部材222が回転し、ピストン214がディスクロータ22側に押し出される。そのため、ブレーキペダル24の操作量とは無関係に、ホイールシリンダ23のフルード充填容積が増加する。
本実施形態のブレーキ装置20は、ピストン214を液圧制動装置とパーキングブレーキ装置とで共用しているため、パーキングブレーキ装置の動作が開始されると、制御圧センサ73の検出値が低下する可能性がある。なお、ハイドロブースタモードにおいては、ブレーキペダル24が操作されている状況下でパーキングブレーキの動作が開始されたときに、制御圧センサ73の検出値が低下する可能性が生じる。
また逆に、パーキングブレーキ装置が作動している状態で、ドライバがパーキングスイッチをOFF操作すると、パーキングブレーキ制御部328は、その操作をパーキングブレーキ装置の動作解除情報として受け取り、電動モータ230に負方向の電流を供給して、負回転させる。これにより、パーキングブレーキ装置の作動時とは逆回転となるように電動モータ230が駆動され、棒ねじ部材224aとともにナット部材222が回転することで、ピストン214がディスクロータ22側から離れる方向に退動される。そのため、ブレーキペダル24の操作量とは無関係に、ホイールシリンダ23のフルード充填容積が減少することとなり、制御圧センサ73の検出値が上昇する可能性がある。以下、この原理を、リニア制御モードの場合と、ハイドロブースタモードの場合に分けて説明する。
リニア制御モードでは、分離弁60が開弁されて主流路45の第1流路45aと第2流路45bとが互いに連通しており、各ABS保持弁51〜54が開放される一方、各ABS減圧弁56〜59が閉鎖されている。ドライバがパーキングスイッチをON操作すると、ピストン214がディスクロータ22側に押し出されるため、ドライバがブレーキペダル24を踏み込んでいるか否かにかかわらず、制御圧センサ73の検出値は減少する。また逆に、パーキングブレーキ装置が作動している状態で、ドライバがパーキングスイッチをOFF操作すると、ピストン214がディスクロータ22側から退動されるため、制御圧センサ73の検出値は増加する。
図5は、ブレーキペダル24のストローク量と液圧センサの検出値の関係を示す。図5において、ポイントAは、ストローク量がSTであるときのセンサ検出値の標準値を示す。パーキングスイッチがON操作されたときに、制御圧センサ73の検出値が破線344で示される下限値よりも高ければ、異常判定部322は正常であることを判定するが、制御圧センサ73の検出値が下限値よりも低くなると(ポイントB)、異常判定部322は異常が生じていることを判定する。同様に、パーキングスイッチがOFF操作されたときに、制御圧センサ73の検出値が破線342で示される上限値よりも低ければ、異常判定部322は正常であることを判定するが、制御圧センサ73の検出値が上限値よりも高くなると(ポイントC)、異常判定部322は異常であることを判定する。
リニア制御モードでは、ブレーキECU70が、ブレーキペダル24のストローク量に応じて、液圧を制御する。具体的には、ストローク量に対して液圧が低ければ、ブレーキECU70は、増圧リニア制御弁66を開弁して動力液圧源30からブレーキフルードを供給する増圧制御を行う。これにより、異常な液圧低下は解消し、制御圧センサ73の検出値は、適正な範囲を示すようになる。一方、ストローク量に対して液圧が高ければ、ブレーキECU70は、減圧リニア制御弁67を開弁して、液圧回路からブレーキフルードを逃がす減圧制御を行う。これにより、異常な液圧上昇は解消し、制御圧センサ73の検出値は適正な範囲を示すようになる。このように、パーキングブレーキを作動または解除することで、異常判定部322は、一時的には異常を判定するが、ストローク量と液圧の関係は、ブレーキECU70により正常に戻されると、正常であることを判定するようになる。この自律的な液圧制御は、液圧制御部326により実行される。
ハイドロブースタモードでは、マスタカット弁64およびレギュレータカット弁65が開放される一方、分離弁60およびシミュレータカット弁68が閉鎖されている。マスタシリンダ32はブレーキペダル24の踏み込みが解除されているときにリザーバ34と連通しているため、ブレーキペダル24が踏み込まれていなければ、パーキングブレーキ装置を作動または解除しても、液圧センサの検出値は変動しない。一方、ブレーキペダル24が踏み込まれると、マスタシリンダ32はリザーバ34との連通を遮断される。したがって、ブレーキペダル24が踏み込まれた状態で、ドライバがパーキングスイッチをON操作すると、ピストン214がディスクロータ22側に押し出されるため、制御圧センサ73の検出値は減少する。また逆に、ブレーキペダル24が踏み込まれ、且つパーキングブレーキ装置が作動している状態で、ドライバがパーキングスイッチをOFF操作すると、ピストン214がディスクロータ22側から退動されるため、制御圧センサ73の検出値は増加する。したがって、ハイドロブースタモードでも、図5に示すように、ブレーキペダル24のストローク量に対して、液圧センサの検出値が適正な範囲から外れる状況が生じうる。
ハイドロブースタモードにおいて、ストローク量に対して液圧が低ければ、ブレーキフルードの不足分は、ブレーキペダル24を引き込むことで補われる。これにより異常な液圧低下は解消し、制御圧センサ73の検出値は、適正な範囲を示すようになる。一方、ストローク量に対して液圧が高ければ、ブレーキフルードの余剰分は、ブレーキペダル24を押し上げることで吸収される。これにより異常な液圧上昇は解消し、制御圧センサ73の検出値は適正な範囲を示すようになる。このように、パーキングブレーキを作動または解除することで、異常判定部322は、一時的には異常を判定するが、ストローク量と液圧の関係は、ブレーキペダル24が移動することで正常に戻されると、正常であることを判定するようになる。
以上のように、動力液圧源30を用いたリニア制御モードにおいても、マスタシリンダユニット27を用いたハイドロブースタモードにおいても、パーキングブレーキを作動または解除した場合には、異常判定部322が、一時的に、異常を判定することがある。この異常は、パーキングブレーキの作動または解除により判定されたものであり、本来検出するべき異常とは切り離さなければならない。そこで本実施形態の異常判定部322は、パーキングブレーキの作動または解除により異常を判定する可能性がある期間、図4に示す判定マップを用いた異常判定処理を変更する。具体的には、この期間、異常判定部322は、図4に示す判定マップを用いた異常判定処理を実行しない。異常判定部322は、異常判定処理そのものを停止し、または、補正した判定マップを用いて異常判定条件を変更した異常判定処理を行う。
図6は、異常判定処理の停止制御のフローチャートを示す。このフローは、リニア制御モードおよびハイドロブースタモードにおいて共通に利用されてよいが、上記したように、ハイドロブースタモードでは、ブレーキペダル24が踏み込まれていなければ、パーキングブレーキを作動または解除しても、液圧センサの検出値は変動しないため、異常判定処理の停止制御は必要ない。一方、リニア制御モードでは、ホイールシリンダ23と動力液圧源30との連通が遮断されているため、ブレーキペダル24が踏み込まれている否かにかかわらず、異常判定処理の停止制御は必要となる。
異常判定処理の停止制御において、まず異常判定部322は、ストローク量取得部304で取得したストローク量から、ブレーキペダル24が操作されたか否かを判定する(S10)。異常判定部322は、ブレーキランプスイッチの状態から、ブレーキペダル24が操作されたか否かを判定してもよい。なお、S10のステップは、ハイドロブースタモードで実行され、リニア制御モードでは実行されなくてよい。ハイドロブースタモードにおいて、ブレーキペダル24が操作されていなければ(S10のN)、本フローは終了する。一方で、ストローク量取得部304が0より大きいストローク量を取得していれば(S10のY)、パーキングブレーキ制御部328が、パーキングスイッチの操作状態を監視する(S12)。
ドライバがパーキングスイッチを操作せず、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作開始情報または動作解除情報を受け取らなければ(S12のN)、本フローは終了する。一方、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作開始情報または動作解除情報を受け取ると(S12のY)、パーキングブレーキ制御部328が、その旨を異常判定部322に通知する。異常判定部322は、通知を受け取ると、異常判定停止フラグをONにセットする(S14)。異常判定停止フラグのONは、異常判定部322による異常判定処理を実行してはいけないことを意味し、異常判定停止フラグのOFFは、異常判定部322による異常判定処理を実行してよいことを意味する。異常判定部322は、異常判定停止フラグを参照して、異常判定処理を実行してよいか否かを判断する。異常判定停止フラグがONのとき、異常判定部322は、異常判定処理を実行できず、異常判定停止フラグがOFFとなるまで、異常判定処理を停止する。
異常判定停止フラグがONにセットされた後、パーキングブレーキ制御部328はパーキングブレーキを作動または解除し、異常判定部322は、所定の時間が経過するまで異常判定処理を停止し(S16のN)、所定の時間が経過すると(S16のY)、異常判定停止フラグをOFFにセットする(S18)。これにより、異常判定部322は、異常判定処理を実行できるようになる。なお所定時間は、パーキングブレーキの作動または解除により生じた液圧変化が正常に戻る時間に設定される。この時間は、設計により求めてもよく、また実験により求めてもよいが、大体数100m秒程度である。以上のように、S16のステップにおいて、所定時間、異常判定を停止することで、パーキングブレーキの作動または解除により液圧変化が生じているときに、不必要に異常を判定しなくてよく、液圧制動装置の動作を適切に維持することが可能となる。
図7は、異常判定条件の変更処理のフローチャートを示す。異常判定条件の変更処理において、まず異常判定部322は、ストローク量取得部304で取得したストローク量から、ブレーキペダル24が操作されたか否かを判定する(S30)。異常判定部322は、ブレーキランプスイッチの状態から、ブレーキペダル24が操作されたか否かを判定してもよい。なお、S30のステップは、図6に示したS10のステップと同様に、ハイドロブースタモードで実行され、リニア制御モードでは実行されなくてよい。ハイドロブースタモードにおいて、ブレーキペダル24が操作されていなければ(S30のN)、本フローは終了する。一方で、ストローク量取得部304が0より大きいストローク量を取得していれば(S30のY)、パーキングブレーキ制御部328が、パーキングスイッチの操作状態を監視する(S32)。
ドライバがパーキングスイッチを操作せず、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作開始情報または動作解除情報を受け取らなければ(S32のNおよびS40のN)、本フローは終了する。一方、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作開始情報を受け取ると(S32のY)、パーキングブレーキ制御部328が、その旨を異常判定部322に通知する。異常判定部322は、通知を受け取ると、異常判定条件変更フラグをONにセットする(S34)。異常判定条件変更フラグのONは、図4に示す異常判定条件を定めた判定マップではなく、補正した判定マップを使用して異常判定処理を実行しなくてはいけないことを意味し、異常判定条件変更フラグのOFFは、図4に示す判定マップを使用して異常判定処理を実行することを意味する。異常判定部322は、異常判定条件変更フラグを参照して、図4に示す判定マップを使用可能か否かを判断する。異常判定条件変更フラグがONのとき、異常判定部322は、補正した判定マップを使用し、異常判定条件変更フラグがOFFのとき、異常判定部322は、補正しない判定マップを使用する。
異常判定条件変更フラグがONにセットされた後、パーキングブレーキ制御部328はパーキングブレーキを作動し、異常判定部322は、下方補正した判定マップを使用した異常判定処理を開始する(S36)。下方補正した判定マップについては後述する。異常判定部322は、所定の時間が経過するまで下方補正した判定マップを使用して異常判定処理を行い(S38のN)、所定の時間が経過すると(S38のY)、異常判定条件変更フラグをOFFにセットして(S48)、下方補正した判定マップの使用を終了する(S50)。これにより、異常判定部322は、通常の判定マップを使用した異常判定処理を実行できるようになる。なおS38のステップにおける所定時間は、パーキングブレーキの作動により生じた液圧変化が正常に戻る時間に設定される。
一方、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作解除情報を受け取ると(S40のY)、パーキングブレーキ制御部328が、その旨を異常判定部322に通知する。異常判定部322は、通知を受け取ると、異常判定条件変更フラグをONにセットする(S42)。異常判定部322は、異常判定条件変更フラグを参照して、図4に示す判定マップを使用可能か否かを判断する。異常判定条件変更フラグがONのとき、異常判定部322は、補正した判定マップを使用し、異常判定条件変更フラグがOFFのとき、異常判定部322は、補正しない判定マップを使用する。
異常判定条件変更フラグがONにセットされた後、パーキングブレーキ制御部328はパーキングブレーキを解除し、異常判定部322は、上方補正した判定マップを使用した異常判定処理を開始する(S44)。上方補正した判定マップについては後述する。異常判定部322は、所定の時間が経過するまで上方補正した判定マップを使用して異常判定処理を行い(S46のN)、所定の時間が経過すると(S46のY)、異常判定条件変更フラグをOFFにセットして(S48)、上方補正した判定マップの使用を終了する(S50)。これにより、異常判定部322は、通常の判定マップを使用した異常判定処理を実行できるようになる。なおS46のステップにおける所定時間は、パーキングブレーキの解除により生じた液圧変化が正常に戻る時間に設定される。
図8は、補正した判定マップを示す。破線352は、ストローク量と液圧センサ検出値の補正した上限値を示し、破線350は、ストローク量と液圧センサ検出値の補正した下限値を示す。破線352で示される補正した上限値を用いた判定マップを、上方補正した判定マップと呼び、破線350で示される補正した下限値を用いた判定マップを、下方補正した判定マップと呼ぶ。
通常の判定マップは、ストローク量に対して、液圧センサ検出値の正常範囲を、破線342で示される上限値と破線344で示される下限値の間の範囲としている。一方、上方補正した判定マップは、上限値を、破線352で示される上限値に置き換える。すなわち上方補正した判定マップは、ストローク量に対して、液圧センサ検出値の正常範囲を、破線352で示される上限値と破線344で示される下限値の間の範囲とする。これにより、ポイントCに示されるセンサ検出値は、上方補正した判定マップを用いると、正常であることが判定できる。破線352の曲線は、設計により求められてもよく、また実験により求められてもよい。
下方補正した判定マップは、下限値を、破線350で示される下限値に置き換える。すなわち下方補正した判定マップは、ストローク量に対して、液圧センサ検出値の正常範囲を、破線342で示される上限値と破線350で示される下限値の間の範囲とする。これにより、ポイントBに示されるセンサ検出値は、下方補正した判定マップを用いると、正常であることが判定できる。破線350の曲線は、設計により求められてもよく、また実験により求められてもよい。
以上のように、補正した判定マップを利用することで、異常判定部322は、パーキングブレーキの作動または解除により生じる液圧変化を吸収しつつ、異常判定処理を継続することができる。これにより、パーキングブレーキの作動または解除により液圧変化が生じている場合であっても、適切に異常判定を実行できる。
以上、判定マップを用いた異常判定処理について説明したが、ブレーキ装置20において液圧センサにより検出される液圧は、他の制御においても利用される。たとえばブレーキ装置20は、マスタカット弁64が開弁している状態で、マスタシリンダ圧が所定の範囲から外れた場合、具体的には所定の閾値よりも高くなった場合に、ドライバより急ブレーキ要求があったことを認識して、動力液圧源30からブレーキフルードを供給するブレーキアシスト機能を有している。
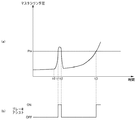
図9(a)は、マスタシリンダ圧の変化を示し、図9(b)は、ブレーキアシスト機能のON、OFFを示す。ブレーキアシスト機能のONは、機能が実行されることを意味し、OFFは、機能が実行されないことを意味する。図9(a)において、閾値Pmは、ブレーキアシスト機能をONするための圧力を示す。液圧制御部326は、マスタシリンダ圧を監視し、閾値Pmを超えると、増圧リニア制御弁66を開弁してブレーキフルードを液圧回路に供給し、ブレーキアシストを実行する。
図9(a)において、時間t0は、パーキングブレーキが解除された時刻を示す。パーキングブレーキが解除されると、ホイールシリンダ23内のピストン214がディスクロータ22側から離れる方向に退動されるため、ホイールシリンダ23のフルード充填容積が減少し、マスタシリンダ圧が上昇する。液圧制御部326は、時間t1でマスタシリンダ圧が閾値Pmを超えると、ブレーキアシスト機能を実行することを判定し、増圧リニア制御弁66を開弁する。しかしながら、実際には、時間t0からの昇圧分は、パーキングブレーキの解除に伴うものであるため、液圧制御部326がブレーキアシストを開始することは好ましくない。一方、時間t3でマスタシリンダ圧が閾値Pmを超えたときには、液圧制御部326は、ブレーキアシスト機能を適切に実行する必要がある。
本実施形態の液圧制御部326は、パーキングブレーキの解除による液圧上昇が正常に戻るまでの期間、閾値Pmを用いたブレーキアシスト判定処理を実行しない。液圧制御部326は、判定処理そのものを停止してもよいが、補正した閾値を用いて判定条件を変更した判定処理を行ってもよい。以下、判定条件を変更した場合について説明する。
図10は、判定条件の変更処理のフローチャートを示す。判定条件の変更処理において、まず液圧制御部326は、ストローク量取得部304で取得したストローク量から、ブレーキペダル24が操作されたか否かを判定する(S60)。液圧制御部326は、ブレーキランプスイッチの状態から、ブレーキペダル24が操作されたか否かを判定してもよい。ブレーキペダル24が操作されていなければ(S60のN)、本フローは終了する。一方で、ストローク量取得部304が0より大きいストローク量を取得していれば(S60のY)、パーキングブレーキ制御部328が、パーキングスイッチの操作状態を監視する(S62)。
ドライバがパーキングスイッチを操作せず、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作解除情報を受け取らなければ(S62のN)、本フローは終了する。一方、パーキングブレーキ制御部328が、パーキングブレーキ装置の動作解除情報を受け取ると(S62のY)、パーキングブレーキ制御部328が、その旨を液圧制御部326に通知する。液圧制御部326は、通知を受け取ると、閾値変更フラグをONにセットする(S64)。閾値変更フラグのONは、図9に示す閾値Pmではなく、補正した閾値Pn(>Pm)を使用して判定処理を実行しなくてはいけないことを意味し、閾値変更フラグのOFFは、閾値Pmを使用して判定処理を実行することを意味する。液圧制御部326は、閾値変更フラグを参照して、閾値Pmを使用するか、閾値Pnを使用するかを判断する。閾値変更フラグがONのとき、液圧制御部326は、閾値Pnを使用し、閾値変更フラグがOFFのとき、異常判定部322は、閾値Pmを使用する。
閾値変更フラグがONにセットされた後、パーキングブレーキ制御部328はパーキングブレーキを解除し、液圧制御部326は、閾値Pnを使用した判定処理を開始する(S66)。液圧制御部326は、所定の時間が経過するまで閾値Pnを使用して判定処理を行い(S68のN)、所定の時間が経過すると(S68のY)、閾値変更フラグをOFFにセットして(S70)、使用する閾値をPmに戻す(S72)。これにより、液圧制御部326は、通常の閾値Pmを使用した判定処理を実行できるようになる。なおS68のステップにおける所定時間は、パーキングブレーキの解除により生じた液圧変化が正常に戻る時間よりも長い時間に設定される。
図11(a)は、マスタシリンダ圧の変化と、閾値との関係を示し、図11(b)は、ブレーキアシスト機能のON、OFFを示す。図11(c)は、閾値変更フラグのON,OFFを示す。
図11(a)に示すように、液圧制御部326は、時間t0でパーキングブレーキ制御部328から動作解除情報を受け取ったことを通知されると、閾値をPmからPnに変更する。閾値Pnは、パーキングブレーキの解除にともなう液圧上昇分を加味して決定され、設計により求められてもよく、また実験により求められてもよい。閾値の変更は、(T−t0)の期間継続される。この期間は、パーキングブレーキの解除により生じた液圧変化が正常に戻る時間よりも長い時間に設定される。
これにより、液圧制御部326は、時間t1〜t2の間に、マスタシリンダ圧が閾値を超えたことを判定しない。したがって、液圧制御部326は、無用なブレーキアシスト機能を実行しないでよく、時間t3からの適切なブレーキアシスト機能を実行できるようになる。
上述の実施形態におけるブレーキ装置の構成は、実施形態での説明に限定されるものではなく、自明な範囲で適宜その構成を変更して用いることができる。たとえばブレーキ装置20として、図1の電子ブレーキ制御システムを例示したが、たとえば従来よりあるブレーキ制御システム、たとえば動力液圧源30を有さず、マスタシリンダユニット27を第1駆動源とするブレーキ制御システムにおいても、本実施形態で説明した技術を適用することが可能である。
20・・・ブレーキ装置、21・・・ディスクブレーキユニット、22・・・ディスクロータ、23・・・ホイールシリンダ、24・・・ブレーキペダル、25・・・ストロークセンサ、27・・・マスタシリンダユニット、30・・・動力液圧源、32・・・マスタシリンダ、73・・・制御圧センサ、200・・・キャリパ、230・・・電動モータ、300・・・状態量取得部、302・・・液圧取得部、304・・・ストローク量取得部、320・・・処理部、322・・・異常判定部、324・・・制御モード決定部、326・・・液圧制御部、328・・・パーキングブレーキ制御部。
Claims (12)
- ホイールシリンダ内に配設した押圧部材を変位させて摩擦材を車輪とともに回転する回転部材に押圧して制動力を発生させるブレーキ装置において、
前記押圧部材を変位させる第1駆動源と、
前記押圧部材を変位させる第2駆動源と、
前記第1駆動源における状態量を取得する状態量取得部と、
前記状態量取得部により取得された状態量が所定の判定条件を満足するか判定し、所定の判定条件を満たさなければ、特定の状態が発生したことを判定する処理部と、を備え、
前記処理部は、前記第1駆動源の動作中に、前記第2駆動源の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更することを特徴とするブレーキ装置。 - ホイールシリンダは、液圧回路に連通していることを特徴とする請求項1に記載のブレーキ装置。
- 前記第1駆動源は、ブレーキペダルの操作量に応じてホイールシリンダの液圧を調整する液圧制動装置であり、
前記第2駆動源は、電動モータの動作により駆動力を押圧部材に機械的に伝達するパーキングブレーキ装置である、
ことを特徴とする請求項1または2に記載のブレーキ装置。 - 前記処理部は、前記パーキングブレーキ装置の動作開始情報を受け取ると、所定の判定条件を用いた判定処理を変更することを特徴とする請求項3に記載のブレーキ装置。
- 前記処理部は、前記パーキングブレーキ装置の動作解除情報を受け取ると、所定の判定条件を用いた判定処理を変更することを特徴とする請求項3または4に記載のブレーキ装置。
- 前記状態量取得部は、前記液圧回路における液圧を取得する液圧取得部を有することを特徴とする請求項2に記載のブレーキ装置。
- 前記処理部は、前記状態量取得部により取得された状態量が所定の範囲から外れた場合に、当該ブレーキ装置に異常が生じたことを判定する異常判定部を有することを特徴とする請求項1から6のいずれかに記載のブレーキ装置。
- 前記異常判定部は、前記第2駆動源の動作が開始されたことを検出すると、異常判定処理を所定時間停止することを特徴とする請求項7に記載のブレーキ装置。
- 前記異常判定部は、前記第2駆動源の動作が開始されたことを検出すると、所定の判定条件を所定時間変更することを特徴とする請求項7に記載のブレーキ装置。
- 前記処理部は、前記状態量取得部により取得された状態量が所定の範囲から外れた場合に、当該ブレーキ装置の液圧制御を実行することを判定する液圧制御部を有することを特徴とする請求項1から9のいずれかに記載のブレーキ装置。
- 前記液圧制御部は、前記第2駆動源の動作が開始されたことを検出すると、液圧制御処理を所定時間停止することを特徴とする請求項10に記載のブレーキ装置。
- 前記液圧制御部は、第2駆動源の動作が開始されたことを検出すると、所定の判定条件を所定時間変更することを特徴とする請求項10に記載のブレーキ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282184A JP2012126364A (ja) | 2010-12-17 | 2010-12-17 | ブレーキ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282184A JP2012126364A (ja) | 2010-12-17 | 2010-12-17 | ブレーキ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012126364A true JP2012126364A (ja) | 2012-07-05 |
Family
ID=46643900
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010282184A Pending JP2012126364A (ja) | 2010-12-17 | 2010-12-17 | ブレーキ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012126364A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014019344A (ja) * | 2012-07-19 | 2014-02-03 | Honda Motor Co Ltd | 車両用制動力発生装置 |
| US9260093B2 (en) | 2011-12-14 | 2016-02-16 | Toyota Jidosha Kabushiki Kaisha | Brake apparatus and braking control apparatus |
| JP2016113114A (ja) * | 2014-12-17 | 2016-06-23 | トヨタ自動車株式会社 | 電動パーキングブレーキ装置 |
-
2010
- 2010-12-17 JP JP2010282184A patent/JP2012126364A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9260093B2 (en) | 2011-12-14 | 2016-02-16 | Toyota Jidosha Kabushiki Kaisha | Brake apparatus and braking control apparatus |
| JP2014019344A (ja) * | 2012-07-19 | 2014-02-03 | Honda Motor Co Ltd | 車両用制動力発生装置 |
| JP2016113114A (ja) * | 2014-12-17 | 2016-06-23 | トヨタ自動車株式会社 | 電動パーキングブレーキ装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5761373B2 (ja) | ブレーキ装置および制動制御装置 | |
| US9643581B2 (en) | Electric brake system | |
| US9751511B2 (en) | Electric brake system | |
| US9522668B2 (en) | Brake apparatus | |
| EP2436568B1 (en) | Braking control apparatus | |
| US9527486B2 (en) | Brake device | |
| JP4780190B2 (ja) | ブレーキ制御装置 | |
| JP4640386B2 (ja) | ブレーキ装置およびブレーキ制御方法 | |
| JP3379397B2 (ja) | 液圧ブレーキ装置 | |
| US20180194332A1 (en) | Brake Control Apparatus and Brake System | |
| JP5338653B2 (ja) | ブレーキ制御装置および電磁弁の作動判定方法 | |
| JP2012126364A (ja) | ブレーキ装置 | |
| JP5115014B2 (ja) | ブレーキ制御装置 | |
| JP3458652B2 (ja) | 液圧制御装置 | |
| US20210284116A1 (en) | Brake device | |
| US10207691B2 (en) | Brake apparatus | |
| JP4816566B2 (ja) | ブレーキ制御装置およびブレーキ制御方法 | |
| JP5251675B2 (ja) | ブレーキ制御装置 | |
| KR102036900B1 (ko) | 전자식 브레이크 시스템 | |
| JP6467079B2 (ja) | ブレーキ装置 | |
| JP5062070B2 (ja) | 制動制御装置および制動制御方法 | |
| JP5262920B2 (ja) | ブレーキ制御装置 | |
| JP2010111230A (ja) | 車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置 | |
| JP2006021580A (ja) | 制動装置 | |
| JP2010127313A (ja) | ブレーキ装置のパッドクリアランス調整方法 |