JP2012123750A - 車両用画像処理装置および車両用画像処理方法 - Google Patents
車両用画像処理装置および車両用画像処理方法 Download PDFInfo
- Publication number
- JP2012123750A JP2012123750A JP2010276270A JP2010276270A JP2012123750A JP 2012123750 A JP2012123750 A JP 2012123750A JP 2010276270 A JP2010276270 A JP 2010276270A JP 2010276270 A JP2010276270 A JP 2010276270A JP 2012123750 A JP2012123750 A JP 2012123750A
- Authority
- JP
- Japan
- Prior art keywords
- road surface
- vehicle
- camera
- approximate plane
- coordinate value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
【解決手段】車両用画像処理装置10は、記憶部13、路面検出部27、近似平面作成部31および路面データ更新部32を備える。記憶部13は、設定路面上の点についてカメラ座標系における画像上の座標値と光軸方向座標値とを関連付けた路面データを記憶する。路面検出部27は、スケールファクタつき相対並進成分と自車の並進成分とを用いてカメラ座標系における対象物の光軸方向座標値を算出するとともに、路面データにおいて対象物の画像上の座標値と関連付けられた光軸方向座標値を記憶部13から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると対象物を路面と判定する。近似平面作成部31は、複数の対象物のなす近似平面を表す式を立て、この近似平面上の点について近似平面データを求める。路面データ更新部32は、記憶部13の路面データを近似平面データで更新する。
【選択図】図1
Description
(第1の実施形態)
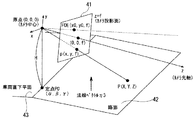
ここで、カメラ座標系について簡単に説明する。
u = xy(1/f)Rx−(x2+f2)(1/f)Ry+yRz−f(Tx/z)+x(Tz/z) (1)
v = (y2+f2)(1/f) Rx−xy(1/f)Ry−xRz−f(Ty/z)+y(Tz/z) (2)
[u−xy(1/f)Rx+(x2+f2)(1/f)Ry−yRz]/[ v−(y2+f2)(1/f) Rx+xy(1/f)Ry+xRz]
= [x-x0]/[y-y0] (3)
u−xy(1/f)Rx+(x2+f2)(1/f)Ry−yRz = −f(Tx/z)+x(Tz/z) (4)
v−(y2+f2)(1/f) Rx+xy(1/f)Ry+xRz = −f(Ty/z)+y(Tz/z) (5)
(x−x0)/(y−y0) = { −f(Tx/z)+x(Tz/z)}/{ −f(Ty/z)+y(Tz/z)}
= (x−fTx/Tz)/(y−fTy/Tz) (6)
x0/f=Tx/Tz (7)
yo/f=Ty/Tz (8)
{u−xy(1/f)Rx +(x2+f2)(1/f)Ry −yRz}=(−x0+x)(Tz/z) (9)
{v−(y2+f2)(1/f) Rx+xy(1/f)Ry+xRz} =(−y0+y)(Tz/z) (10)
Tzave=(1/m)Σ(Tz/z)n・z2n (n=1,2,・・・m-1,m) (11)
z1n= (z/Tz)n・Tzave (12)
Xn=(z1n/f)・xn (13)
Yn=(z1n/f)・yn (14)
Z=z1n (15)
S=(1/N)Σ(Xn,Yn,Zn)T(Xn,Yn,Zn) (16)
ただし、Nは対象物の総数を表し、Σは複数画素N個についての総和を表す。
α=0 (17)
β=−Hf/√(f2+y02) (18)
γ=Hy0/√(f2+y02) (19)
η31(X−α)+η32(Y−β)+η33(Z−γ)=0 (20)
η31(xz−αf)+η32(yz−βf)+η33(fz−γf)=0 (21)
z =f(η31α+η32β+η33γ)/(η31x+η32y+η33f)
= Hf(−η32f+η33y0)/{(η31x+η32y+η33f)√(f2+yo2)} (22)
(η13η22−η23η12)(X−α)+(η11η23−η13η21)(Y−β)
+ (η21,η12−η11,η22) (Z−γ)=0 (23)
z=f{(η13η22−η23η12)α+(η11η23−η13η21)β+η33γ}
/{(η13η22−η23η12)x+(η11η23−η13η21)y+ (η21η12−η11η22)f} (24)
r2=X2+Y2+Z2=(x2+y2+f2)(z2/f2) (25)
(第2の実施形態)
(第3の実施形態)
η31X+η32Y+η33Z=d (26)
η31X+η32Y+η33Z=dave (27)
z2=fdave/(η31x+η32y+η33f) (28)
11 カメラ
12 画像処理ECU
13 記憶部
21 スウィング角補正部
22 動きベクトル算出部
23 回転成分算出部
24 移動体検出部
25 スケールファクタ付き並進成分算出部
26 自車並進成分算出部
27 路面検出部
28 路面上点座標算出部
29 固有値・固有ベクトル算出部
30 定点設定部
31 近似平面作成部
32 路面データ更新部
33 スウィング角算出部
41 カメラ投影面
42 路面
43 車両直下平面
51 自車速度検出部
52 カメラ高さ校正部
61 路面上点信頼性評価部
Claims (11)
- 車両に設けられ前記車両の周辺を撮像するカメラと、
前記カメラにより撮像された画像に含まれる対象物に対応する動きベクトルと前記車両の回転成分とにもとづいて、スケールファクタ付き相対並進成分を算出するスケールファクタ付き並進成分算出部と、
所定の設定路面上の点についてカメラ座標系における前記画像上の座標値と光軸方向座標値とを関連付けたデータである路面データを記憶する記憶部と、
前記スケールファクタつき相対並進成分と自車の並進成分とを用いて前記カメラ座標系における前記対象物の光軸方向座標値を算出するとともに、前記路面データにおいて前記対象物の前記画像上の座標値と関連付けられた光軸方向座標値を前記記憶部から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると前記対象物を路面と判定する路面検出部と、
を備えた車両用画像処理装置。 - 前記路面と判定された複数の前記対象物の前記カメラ座標系における三次元座標値の共分散行列の固有ベクトルを用いて前記複数の対象物のなす近似平面を表す式を立てることにより、この近似平面上の点について前記カメラ座標系における前記画像上の座標値と光軸方向座標値とを関連付けた近似平面データを求める近似平面作成部と、
前記所定の設定路面を前記近似平面とするよう、前記記憶部の前記路面データを前記近似平面データで更新する路面データ更新部と、
をさらに備えた請求項1記載の車両用画像処理装置。 - 前記共分散行列は、
値が大きい順に第1、第2および第3の固有値を有するとともに、各固有値にそれぞれ対応する第1、第2および第3の固有ベクトルを有し、
前記近似平面作成部は、
前記共分散行列の前記第1および前記第2の固有値が第1の固有値閾値以上であり、かつ前記第3の固有値が第2の固有値閾値以下であると、前記近似平面を表す式として前記第3の固有値に対応する前記第3の固有ベクトルに直交する平面を表す式を立てる、
請求項2記載の車両用画像処理装置。 - 前記近似平面作成部は、
前記近似平面を表す式と、前記車両直下の路面からみた前記カメラが取り付けられた高さと、前記カメラの中心から下ろした鉛直線と前記車両直下の路面との交点と、を用いて前記近似平面データを求める、
請求項3記載の車両用画像処理装置。 - 前記記憶部に記憶された前記路面データから前記対象物の前記画像上の座標値と関連付けられた光軸方向座標値を取得し、この光軸方向座標値を前記スケールファクタ付き相対並進成分に乗ずることにより、前記画像にもとづいて前記自車の並進成分を算出して前記路面検出部に与える自車並進成分算出部、
をさらに備えた請求項4に記載の車両用画像処理装置。 - 前記自車の並進成分を検出して前記路面検出部に与える自車速度検出部と、
前記スケールファクタつき相対並進成分と前記自車速度検出部により検出された前記自車の並進成分とを用いて算出された前記カメラ座標系における前記対象物の光軸方向座標値を前記路面検出部から取得するとともに、前記第3の固有ベクトルに直交する平面を表す式に対して前記カメラの中心から下ろした鉛直線と前記車両直下の路面との交点であって前記カメラ座標系における三次元座標値を前記車両直下の路面からみた前記カメラが取り付けられた高さを未知数として表された交点の前記三次元座標値を代入した式を前記近似平面作成部から取得し、この式に対して前記複数の対象物の前記光軸方向座標値を代入することにより複数の前記未知数の値を求め、この求めた複数の値の平均を前記カメラが取り付けられた高さとする高さ校正部と、
をさらに備え、
前記近似平面作成部は、
前記近似平面を表す式と、前記高さ校正部により算出された前記カメラが取り付けられた高さと、前記カメラの中心から下ろした鉛直線と前記車両直下の平面との交点と、を用いて前記近似平面データを求める、
請求項3記載の車両用画像処理装置。 - 前記自車の並進成分を検出して前記路面検出部に与える自車速度検出部と、
前記路面と判定された複数の前記対象物間のベクトルと前記第3の固有ベクトルとの内積が所定の信頼性閾値以下である前記対象物を抽出する路面上点信頼性評価部と、
をさらに備え、
前記近似平面作成部は、
前記近似平面を表す式として前記第3の固有値に対応する前記第3の固有ベクトルに直交するとともに1つの未知定数を有する平面を表す式を立て、この式に対して前記路面上点信頼性評価部により抽出された複数の前記対象物の前記三次元座標値を代入して前記未知定数の値を求めることにより前記近似平面データを求める、
請求項3記載の車両用画像処理装置。 - 前記車両の前記回転成分で補正した前記対象物に対応する前記動きベクトルが前記画像上で消失点に向かう場合、前記対象物を静止物と判定する移動体検出部、
をさらに備え、
前記スケールファクタ付き並進成分算出部は、
前記移動体検出部により前記静止物と判定された前記対象物について前記スケールファクタ付き相対並進成分を算出し、
前記路面検出部は、
前記移動体検出部により前記静止物と判定された前記対象物について前記判定を行う、
請求項1ないし7のいずれか1項に記載の車両用画像処理装置。 - 前記カメラにより撮像された画像内に投影した前記第3の固有ベクトルの方向に応じて、前記カメラにより撮像された画像を回転補正するスウィング角補正部、
をさらに備えた請求項3ないし8のいずれか1項に記載の車両用画像処理装置。 - 車両に設けられたカメラが前記車両の周辺を撮像するステップと、
前記カメラにより撮像された画像に含まれる対象物に対応する動きベクトルと前記車両の回転成分とにもとづいて、スケールファクタ付き相対並進成分を算出するステップと、
所定の設定路面上の点についてカメラ座標系における前記画像上の座標値と光軸方向座標値とを関連付けたデータである路面データを記憶部に記憶させるステップと、
前記スケールファクタつき相対並進成分と自車の並進成分とを用いて前記カメラ座標系における前記対象物の光軸方向座標値を算出するとともに、前記路面データにおいて前記対象物の前記画像上の座標値と関連付けられた光軸方向座標値を前記記憶部から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると前記対象物を路面と判定するステップと、
前記路面と判定された複数の前記対象物の前記カメラ座標系における三次元座標値の共分散行列の固有ベクトルを用いて前記複数の対象物のなす近似平面を表す式を立てることにより、この近似平面上の点について前記カメラ座標系における前記画像上の座標値と光軸方向座標値とを関連付けた近似平面データを求めるステップと、
前記所定の設定路面を前記近似平面とするよう、前記記憶部の前記路面データを前記近似平面データで更新するステップと、
を有する車両用画像処理方法。 - 前記共分散行列は、
値が大きい順に第1、第2および第3の固有値を有するとともに、各固有値にそれぞれ対応する第1、第2および第3の固有ベクトルを有し、
前記近似平面データを求めるステップは、
前記共分散行列の前記第1および前記第2の固有値が第1の固有値閾値以上であり、かつ前記第3の固有値が第2の固有値閾値以下であると、前記近似平面を表す式として前記第3の固有値に対応する前記第3の固有ベクトルに直交する平面を表す式を立てるステップである、
請求項10記載の車両用画像処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010276270A JP5588332B2 (ja) | 2010-12-10 | 2010-12-10 | 車両用画像処理装置および車両用画像処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010276270A JP5588332B2 (ja) | 2010-12-10 | 2010-12-10 | 車両用画像処理装置および車両用画像処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012123750A true JP2012123750A (ja) | 2012-06-28 |
| JP5588332B2 JP5588332B2 (ja) | 2014-09-10 |
Family
ID=46505096
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010276270A Active JP5588332B2 (ja) | 2010-12-10 | 2010-12-10 | 車両用画像処理装置および車両用画像処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5588332B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016151976A1 (ja) * | 2015-03-26 | 2016-09-29 | パナソニックIpマネジメント株式会社 | 移動体検出装置、画像処理装置、移動体検出方法、及び、集積回路 |
| KR101780048B1 (ko) | 2016-07-04 | 2017-09-19 | 포항공과대학교 산학협력단 | 단안 카메라를 이용한 동적 상황에서의 움직이는 물체 검출 방법 |
| JP2020068477A (ja) * | 2018-10-25 | 2020-04-30 | アイシン精機株式会社 | カメラパラメータ推定装置、カメラパラメータ推定方法、およびカメラパラメータ推定プログラム |
| WO2020116352A1 (ja) * | 2018-12-04 | 2020-06-11 | アイシン精機株式会社 | 路面検出装置および路面検出プログラム |
| KR20230007645A (ko) * | 2021-07-06 | 2023-01-13 | 한동대학교 산학협력단 | 어안렌즈 카메라를 이용한 자율 발렛 주차 시스템 및 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05233813A (ja) * | 1991-11-25 | 1993-09-10 | Nec Corp | 動画像解析方法 |
| JPH07306037A (ja) * | 1994-05-11 | 1995-11-21 | Nippon Soken Inc | 立体物領域検出装置及び立体物領域迄の距離測定装置及びそれらの検出、測定方法 |
| US20030030546A1 (en) * | 2001-07-11 | 2003-02-13 | Din-Chang Tseng | Monocular computer vision aided road vehicle driving for safety |
| JP2004240480A (ja) * | 2003-02-03 | 2004-08-26 | Matsushita Electric Ind Co Ltd | 運転支援装置 |
| WO2005088244A1 (ja) * | 2004-03-17 | 2005-09-22 | Sony Corporation | 平面検出装置、平面検出方法、及び平面検出装置を搭載したロボット装置 |
| JP2008203992A (ja) * | 2007-02-16 | 2008-09-04 | Omron Corp | 検出装置および方法、並びに、プログラム |
-
2010
- 2010-12-10 JP JP2010276270A patent/JP5588332B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05233813A (ja) * | 1991-11-25 | 1993-09-10 | Nec Corp | 動画像解析方法 |
| JPH07306037A (ja) * | 1994-05-11 | 1995-11-21 | Nippon Soken Inc | 立体物領域検出装置及び立体物領域迄の距離測定装置及びそれらの検出、測定方法 |
| US20030030546A1 (en) * | 2001-07-11 | 2003-02-13 | Din-Chang Tseng | Monocular computer vision aided road vehicle driving for safety |
| JP2004240480A (ja) * | 2003-02-03 | 2004-08-26 | Matsushita Electric Ind Co Ltd | 運転支援装置 |
| WO2005088244A1 (ja) * | 2004-03-17 | 2005-09-22 | Sony Corporation | 平面検出装置、平面検出方法、及び平面検出装置を搭載したロボット装置 |
| JP2008203992A (ja) * | 2007-02-16 | 2008-09-04 | Omron Corp | 検出装置および方法、並びに、プログラム |
Non-Patent Citations (2)
| Title |
|---|
| CSNG199900858007; 太田 直哉: '"信頼性情報を持ったオプティカルフローからの形状復元とその移動物体検出への応用"' 電子情報通信学会論文誌 Vol.J76-D-II, No.8, 19930825, p.1562-1571, 社団法人電子情報通信学会 * |
| JPN6014028587; 太田 直哉: '"信頼性情報を持ったオプティカルフローからの形状復元とその移動物体検出への応用"' 電子情報通信学会論文誌 Vol.J76-D-II, No.8, 19930825, p.1562-1571, 社団法人電子情報通信学会 * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016151976A1 (ja) * | 2015-03-26 | 2016-09-29 | パナソニックIpマネジメント株式会社 | 移動体検出装置、画像処理装置、移動体検出方法、及び、集積回路 |
| JPWO2016151976A1 (ja) * | 2015-03-26 | 2017-10-12 | パナソニックIpマネジメント株式会社 | 移動体検出装置、画像処理装置、移動体検出方法、及び、集積回路 |
| KR101780048B1 (ko) | 2016-07-04 | 2017-09-19 | 포항공과대학교 산학협력단 | 단안 카메라를 이용한 동적 상황에서의 움직이는 물체 검출 방법 |
| JP2020068477A (ja) * | 2018-10-25 | 2020-04-30 | アイシン精機株式会社 | カメラパラメータ推定装置、カメラパラメータ推定方法、およびカメラパラメータ推定プログラム |
| JP7148064B2 (ja) | 2018-10-25 | 2022-10-05 | 株式会社アイシン | カメラパラメータ推定装置、カメラパラメータ推定方法、およびカメラパラメータ推定プログラム |
| WO2020116352A1 (ja) * | 2018-12-04 | 2020-06-11 | アイシン精機株式会社 | 路面検出装置および路面検出プログラム |
| JP2020090138A (ja) * | 2018-12-04 | 2020-06-11 | アイシン精機株式会社 | 路面検出装置および路面検出プログラム |
| CN113165657A (zh) * | 2018-12-04 | 2021-07-23 | 株式会社爱信 | 路面检测装置以及路面检测程序 |
| JP7211047B2 (ja) | 2018-12-04 | 2023-01-24 | 株式会社アイシン | 路面検出装置および路面検出プログラム |
| KR20230007645A (ko) * | 2021-07-06 | 2023-01-13 | 한동대학교 산학협력단 | 어안렌즈 카메라를 이용한 자율 발렛 주차 시스템 및 방법 |
| KR102557429B1 (ko) | 2021-07-06 | 2023-07-20 | 한동대학교 산학협력단 | 어안렌즈 카메라를 이용한 자율 발렛 주차 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5588332B2 (ja) | 2014-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6141601B2 (ja) | 車載カメラ自動キャリブレーション装置 | |
| US10594941B2 (en) | Method and device of image processing and camera | |
| US10620000B2 (en) | Calibration apparatus, calibration method, and calibration program | |
| US10726576B2 (en) | System and method for identifying a camera pose of a forward facing camera in a vehicle | |
| EP2437494B1 (en) | Device for monitoring area around vehicle | |
| US10645365B2 (en) | Camera parameter set calculation apparatus, camera parameter set calculation method, and recording medium | |
| JP5133783B2 (ja) | 車載装置 | |
| US20110298988A1 (en) | Moving object detection apparatus and moving object detection method | |
| JP5612915B2 (ja) | 移動体検出装置及び移動体検出方法 | |
| JP2019528501A (ja) | マルチカメラシステムにおけるカメラ位置合わせ | |
| US10204445B2 (en) | Information processing apparatus, method, and storage medium for determining a failure of position and orientation measurement of an image capturing device | |
| JP6764573B2 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP5588332B2 (ja) | 車両用画像処理装置および車両用画像処理方法 | |
| CN109997150B (zh) | 用于对道路特征进行分类的系统和方法 | |
| JP2006252473A (ja) | 障害物検出装置、キャリブレーション装置、キャリブレーション方法およびキャリブレーションプログラム | |
| JP5695405B2 (ja) | 車両用画像処理装置および車両用画像処理方法 | |
| JP6306735B2 (ja) | ステレオカメラ装置及びステレオカメラ装置を備える車両 | |
| US11740103B2 (en) | Map creation device, map creation system, map creation method, and storage medium | |
| CN110942470A (zh) | 图像处理装置 | |
| JP6151535B2 (ja) | パラメータ取得装置、パラメータ取得方法及びプログラム | |
| JP5267100B2 (ja) | 運動推定装置及びプログラム | |
| JP2020035158A (ja) | 姿勢推定装置およびキャリブレーションシステム | |
| JP2018136739A (ja) | キャリブレーション装置 | |
| JP2013074325A (ja) | 車載カメラ用画像補正方法および車載カメラ用画像補正プログラム | |
| JP4735361B2 (ja) | 車両乗員顔向き検出装置および車両乗員顔向き検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140708 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140725 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5588332 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |