JP2012121433A - 車両の動力伝達制御装置 - Google Patents
車両の動力伝達制御装置 Download PDFInfo
- Publication number
- JP2012121433A JP2012121433A JP2010273312A JP2010273312A JP2012121433A JP 2012121433 A JP2012121433 A JP 2012121433A JP 2010273312 A JP2010273312 A JP 2010273312A JP 2010273312 A JP2010273312 A JP 2010273312A JP 2012121433 A JP2012121433 A JP 2012121433A
- Authority
- JP
- Japan
- Prior art keywords
- start point
- torque
- clutch
- vehicle
- actual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
【課題】HV−MT車について、クラッチペダル操作に基づいて変化する内燃機関のトルク及び電動機のトルクのそれぞれの変化タイミングの間のずれの発生を抑制すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方に調整される。摩擦クラッチの実際のミート開始点及び実際のリリース開始点が検出される。MGトルク制限値の決定に使用されるマップに使用されるクラッチのミート開始点及びリリース開始点が、検出された実際のミート開始点及び実際のリリース開始点に一致するように較正される。
【選択図】図6
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方に調整される。摩擦クラッチの実際のミート開始点及び実際のリリース開始点が検出される。MGトルク制限値の決定に使用されるマップに使用されるクラッチのミート開始点及びリリース開始点が、検出された実際のミート開始点及び実際のリリース開始点に一致するように較正される。
【選択図】図6
Description
本発明は、車両の動力伝達制御装置に関し、特に、動力源として第1動力源(例えば、内燃機関)と第2動力源(例えば、電動機)とを備えた車両に適用され、摩擦クラッチを備えたものに係わる。
従来より、動力源としてエンジンと電動機(電動モータ、電動発電機)とを備えた所謂ハイブリッド車両が広く知られている(例えば、特許文献1を参照)。近年、ハイブリッド車両であって、且つ手動変速機と摩擦クラッチとを備えた車両(以下、「HV−MT車」と呼ぶ)が開発されてきている。ここにいう「手動変速機」とは、運転者により操作されるシフトレバーのシフト位置に応じて変速段が選択されるトルクコンバータを備えない変速機(所謂、マニュアルトランスミッション、MT)である。また、ここにいう「摩擦クラッチ」とは、内燃機関の出力軸と手動変速機の入力軸との間に介装されて、運転者により操作されるクラッチペダルの操作量に応じて摩擦プレートの接合状態が変化するクラッチである。以下、内燃機関の出力軸のトルクを「内燃機関トルク」と呼び、電動機の出力軸のトルクを「電動機トルク」と呼ぶ。
HV−MT車では、電動機の出力軸が、内燃機関の出力軸、変速機の入力軸、及び変速機の出力軸の何れかに接続される構成が採用され得る。以下、電動機の出力軸が変速機の入力軸又は変速機の出力軸に接続される構成について考察する。
この場合、電動機トルクは、例えば、アクセルペダルの操作量(アクセル開度)とクラッチペダルの操作量とに基づいて以下のように調整され得る。即ち、先ず、アクセル開度と「電動機トルクの基準値(電動機トルク基準値)」との間の第1関係(後述する図2を参照)、並びに、クラッチペダル操作量と「電動機トルクの上限値(電動機トルク制限値)」との間の第2関係(後述する図3を参照)が、実験等を通して事前に決定・記憶される。現在のアクセル開度と上記第1関係とに基づいて現在の電動機トルク基準値が決定される。現在のクラッチペダル操作量と上記第2関係とに基づいて現在の電動機トルク制限値が決定される。現在の電動機トルクが、前記決定された現在の電動機トルク基準値及び現在の電動機トルク制限値のうち小さい方の値に調整される。
このように電動機トルクを調整することにより、HV−MT車の電動機トルクを利用した運転フィーリングを、通常MT車(手動変速機と摩擦クラッチとを備え且つ動力源として内燃機関のみを搭載した従前から広く知られた車両)の内燃機関トルクを利用した運転フィーリングに近づけることができる。
ところで、摩擦クラッチでは、クラッチペダル操作量に応じて、動力が伝達されない状態(完全分断状態)、滑りを伴いながら動力が伝達される状態(半接合状態)、及び、滑りを伴わずに動力が伝達される状態(完全接合状態)の何れかの状態が実現される。以下、摩擦クラッチが完全分断状態から半接合状態へと移行するタイミングに対応するクラッチペダル操作量を「ミート開始点」と呼び、摩擦クラッチが完全接合状態から半接合状態へと移行するタイミングに対応するクラッチペダル操作量を「リリース開始点」と呼ぶ。
一般に、上記第2関係は、ミート開始点とリリース開始点を使用して規定される(後述する図3を参照)。上記第2関係の規定に使用されるミート開始点及びリリース開始点は、上記第2関係を決定するために実行された上記実験等に使用された摩擦クラッチの状態に基づいて決定される。ところが、各車両に設けられた摩擦クラッチの実際のミート開始点及びリリース開始点は、摩擦クラッチの個体誤差や摩擦プレートの摩耗等によって異なり得る。
実際のミート開始点及びリリース開始点は、摩擦クラッチを介して駆動輪側に伝達される内燃機関トルクがクラッチペダル操作に基づいて変化する際の変化タイミングに大きく影響を与える。一方、「第2関係の規定に使用されるミート開始点及びリリース開始点」は、駆動輪側に伝達される電動機トルクがクラッチペダル操作に基づいて変化する際の変化タイミングに大きく影響を与える。従って、「第2関係の規定に使用されるミート開始点及びリリース開始点」が実際のミート開始点及びリリース開始点からずれていると、クラッチペダル操作に基づいて変化する内燃機関トルク及び電動機トルクのそれぞれの変化タイミングの間にずれが生じる。このずれは運転者に違和感を与えることに繋がる。
本発明の目的は、特にHV−MT車を対象とする動力伝達制御装置であって、クラッチペダル操作に基づいて変化する第1動力源のトルク及び第2動力源のトルクのそれぞれの変化タイミングの間のずれの発生を抑制して運転者に与える違和感を抑制できるものを提供することにある。
本発明に係る車両の動力伝達制御装置は、動力源として第1動力源と第2動力源とを備えたハイブリッド車両に適用される。この動力伝達装置は、変速機と、摩擦クラッチと、制御手段とを備える。第1動力源及び第2動力源はそれぞれ、内燃機関及び電動機であっても、電動機及び内燃機関であっても、電動機及び電動機であってもよい。以下、第1動力源及び第2動力源がそれぞれ内燃機関及び電動機であるものとして説明を続ける。
変速機は、トルクコンバータを備えた自動変速機であってもよいが、運転者により操作されるシフト操作部材のシフト位置に応じて変速段が選択されるトルクコンバータを備えない手動変速機であることが好ましい。前記変速機は、前記内燃機関の出力軸から動力が入力される入力軸と前記車両の駆動輪へ動力を出力する出力軸とを備える。前記変速機の入力軸又は出力軸には、前記電動機の出力軸が接続される。
摩擦クラッチは、前記内燃機関の出力軸と前記変速機の入力軸との間に介装されて、運転者により操作されるクラッチ操作部材の操作量に応じて、前記完全分断状態、前記半接合状態、及び、前記完全接合状態の何れかの状態を実現する。前記クラッチ操作部材の操作量は、第2検出手段により検出される。
制御手段は、前記内燃機関の出力軸のトルク(内燃機関トルク)、及び前記電動機の出力軸のトルク(電動機トルク)を制御する。特に、電動機トルクは、以下のように調整される。先ず、前記加速操作部材の操作量と電動機トルクの基準(電動機トルク基準値)との間の記憶された第1関係と、前記検出された加速操作部材の操作量と、に基づいて電動機トルク基準値が決定される。前記クラッチ操作部材の操作量と電動機トルクの上限(電動機トルク制限値)との間の記憶された第2関係であってミート開始点とリリース開始点とを使用して規定される第2関係と、前記検出されたクラッチ操作部材の操作量と、に基づいて電動機トルク制限値が決定される。電動機トルクが、前記決定された電動機トルク基準値及び電動機トルク制限値のうち小さい方の値に調整される。前記加速操作部材の操作量は、第1検出手段により検出される。
ここにおいて、前記第2関係では、前記クラッチ操作部材の操作量が前記ミート開始点より前記完全分断状態側の範囲では前記第2トルク制限値がゼロに維持され、前記クラッチ操作部材の操作量が前記リリース開始点より前記完全接合状態側の範囲では前記第2トルク制限値が最大値に維持され、前記クラッチ操作部材の操作量が前記ミート開始点と前記リリース開始点との間では前記クラッチ操作部材の操作量が前記ミート開始点から前記リリース開始点に向けて移動するにつれて前記第2トルク制限値がゼロから増大するように構成され得る。
本発明に係る車両の動力伝達制御装置の特徴は、前記制御手段が、前記運転者により実際に実行された前記クラッチ操作部材の操作を利用して、実際の前記ミート開始点、及び実際の前記リリース開始点を検出する第3検出手段と、前記検出された前記実際のミート開始点及び前記実際のリリース開始点に基づいて前記第2関係を較正・記憶する較正手段と、を備えたことにある。
これによれば、「第2関係の規定に使用されるミート開始点及びリリース開始点」が実際のミート開始点及びリリース開始点に一致するように較正され得る。従って、クラッチペダル操作に基づいて変化する内燃機関トルク及び電動機トルクのそれぞれの変化タイミングの間のずれが抑制され得る。この結果、このずれに起因して運転者が受ける違和感が抑制され得る。
実際のミート開始点、及び実際のリリース開始点の検出は、例えば、前記運転者により実際に実行された前記クラッチ操作部材の操作から得られる前記クラッチ操作部材の操作量の時間に対する変化パターンに基づいてなされ得る。或いは、この検出は、前記第1動力源の出力軸の回転速度、及び前記変速機の入力軸の回転速度の少なくとも1つの変化パターンに基づいてなされ得る。これらの詳細については後述する。
以下、本発明による車両の動力伝達制御装置の実施形態について図面を参照しつつ説明する。
(構成)
図1は、本発明の実施形態に係る動力伝達制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。この車両は、動力源としてエンジンE/GとモータジェネレータM/Gとを備えたハイブリッド車両であり、且つ、トルクコンバータを備えない手動変速機M/Tと摩擦クラッチC/Tとを備える。即ち、この車両は、上述したHV−MT車である。
図1は、本発明の実施形態に係る動力伝達制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。この車両は、動力源としてエンジンE/GとモータジェネレータM/Gとを備えたハイブリッド車両であり、且つ、トルクコンバータを備えない手動変速機M/Tと摩擦クラッチC/Tとを備える。即ち、この車両は、上述したHV−MT車である。
エンジンE/Gは、周知の内燃機関であり、例えば、ガソリンを燃料として使用するガソリンエンジン、軽油を燃料として使用するディーゼルエンジンである。
手動変速機M/Tは、運転者により操作されるシフトレバーSLのシフト位置に応じて変速段が選択されるトルクコンバータを備えない変速機(所謂、マニュアルトランスミッション)である。M/Tは、E/Gの出力軸から動力が入力される入力軸と、車両の駆動輪へ動力を出力する出力軸とを備える。M/Tは、例えば、前進用の4つの変速段(1速〜4速)、及び後進用の1つの変速段(R)を備えている。
M/Tの変速段は、シフトレバーSLとM/T内部のスリーブ(図示せず)とを機械的に連結するリンク機構等を利用してシフトレバーSLのシフト位置に応じて機械的に選択・変更されてもよいし、シフトレバーSLのシフト位置を検出するセンサ(後述するセンサS2)の検出結果に基づいて作動するアクチュエータの駆動力を利用して電気的に(所謂バイ・ワイヤ方式で)選択・変更されてもよい。
摩擦クラッチC/Tは、E/Gの出力軸とM/Tの入力軸との間に介装されている。C/Tは、運転者により操作されるクラッチペダルCPの操作量(踏み込み量)に応じて摩擦プレートの接合状態(より具体的には、E/Gの出力軸と一体回転するフライホイールに対する、M/Tの入力軸と一体回転する摩擦プレートの軸方向位置)が変化する周知のクラッチである。
接合状態としては、完全接合状態、半接合状態、及び、完全分断状態が存在する。完全接合状態とは、滑りを伴わずに動力を伝達する状態を指す。半接合状態とは、滑りを伴いながら動力を伝達する状態を指す。完全分断状態とは、動力を伝達しない状態を指す。以下、クラッチペダルCPが最も深く踏み込まれた状態からのクラッチペダルCPの戻し方向の操作量を「クラッチ戻しストローク」と呼ぶ。
クラッチ戻しストロークは、クラッチペダルCPが最も深く踏み込まれた状態にて「0」となり、クラッチペダルCPが開放されている(操作されていない)状態にて最大となる。クラッチ戻しストロークが「0」から増大するにつれて、C/Tは、完全分断状態から半接合状態を経て完全接合状態へと移行する。
C/Tの接合状態(摩擦プレートの軸方向位置)は、クラッチペダルCPとC/T(摩擦プレート)とを機械的に連結するリンク機構等を利用してCPの操作量に応じて機械的に調整されてもよいし、CPの操作量を検出するセンサ(後述するセンサS1)の検出結果に基づいて作動するアクチュエータの駆動力を利用して電気的に(所謂バイ・ワイヤ方式で)調整されてもよい。
モータジェネレータM/Gは、周知の構成(例えば、交流同期モータ)の1つを有していて、例えば、ロータ(図示せず)がM/Gの出力軸と一体回転するようになっている。M/Gの出力軸は、周知のギヤ列等を介してM/Tの出力軸に動力伝達可能に接続されている。以下、E/Gの出力軸のトルクを「EGトルク」と呼び、M/Gの出力軸のトルクを「MGトルク」と呼ぶ。
本装置は、クラッチペダルCPのクラッチ戻しストロークを検出するクラッチ操作量センサS1と、シフトレバーSLの位置を検出するシフト位置センサS2と、アクセルペダルAPの操作量(アクセル開度)を検出するアクセル操作量センサS3と、ブレーキペダルBPの操作量(踏力、操作の有無等)を検出するブレーキ操作量センサS4と、車輪の速度を検出する車輪速度センサS5と、E/Gの出力軸の回転速度Neを検出する回転速度センサS6と、M/Tの入力軸の回転速度Niを検出する回転速度センサS7と、を備えている。
更に、本装置は、電子制御ユニットECUを備えている。ECUは、上述のセンサS1〜S7、並びにその他のセンサ等からの情報等に基づいて、E/Gの燃料噴射量(スロットル弁の開度)を制御することによりEGトルクを制御し、インバータ(図示せず)を制御することによりMGトルクを制御する。
具体的には、EGトルクとMGトルクとの配分は、上述のセンサS1〜S7、並びにその他のセンサ等からの情報等に基づいて調整される。EGトルク及びMGトルクの大きさはそれぞれ、主としてアクセル開度に基づいて調整される。特に、MGトルクは、本例では、以下のように調整される。
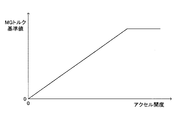
即ち、先ず、図2に示すマップと、現在のアクセル開度とに基づいて、「MGトルク基準値」が決定される。MGトルク基準値は、アクセル開度が大きいほど、より大きい値に決定される。MGトルク基準値のアクセル開度に対する特性は、アクセル開度以外の種々の状態に応じて変化しても変化しなくてもよい。
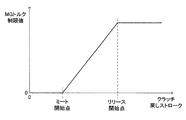
また、図3に示すマップと、現在のクラッチ戻しストロークとに基づいて、「MGトルク制限値」が決定される。MGトルク制限値は、ミート開始点とリリース開始点とを利用して規定される。ミート開始点とは、C/Tが完全分断状態から半接合状態へと移行するタイミングに対応するクラッチ戻しストロークであり、リリース開始点とは、C/Tが完全接合状態から半接合状態へと移行するタイミングに対応するクラッチ戻しストロークである。
この例では、クラッチ戻しストロークが「0」から「ミート開始点」の範囲ではMGトルク制限値が「0」に維持され、クラッチ戻しストロークが「リリース開始点」より大きい範囲ではMGトルク制限値が最大値に維持され、クラッチ戻しストロークが「ミート開始点」と「リリース開始点」との間ではクラッチ戻しストロークが「ミート開始点」から「リリース開始点」に向けて移動するにつれてMGトルク制限値が「0」から増大する。なお、図2及び図3に示すマップは、ECU内のメモリの所定領域に更新可能に記憶されている。
そして、MGトルクは、前記決定された「MGトルク基準値」と「MGトルク制限値」とのうちで小さい方の値に調整される。即ち、MGトルクは、クラッチ戻しストロークに基づいて決定される「MGトルク制限値」を超えない範囲内において、アクセル開度に基づいて決定される「MGトルク基準値」に基づいて調整される。このようにMGトルクを調整することにより、HV−MT車のMGトルクを利用した運転フィーリングを、前記「通常MT車」のEGトルクを利用した運転フィーリングに近づけることができる。
(ミート開始点及びリリース開始点のずれに起因する違和感)
ところで、図3に示すマップに使用されるミート開始点及びリリース開始点は、このマップを作製するために実行された実験等に使用された摩擦クラッチC/Tの状態に基づいて決定されている。しかしながら、各車両に設けられた摩擦クラッチC/Tの実際のミート開始点及びリリース開始点は、摩擦クラッチC/Tの個体誤差や摩擦プレートの摩耗等によって異なり得る。
ところで、図3に示すマップに使用されるミート開始点及びリリース開始点は、このマップを作製するために実行された実験等に使用された摩擦クラッチC/Tの状態に基づいて決定されている。しかしながら、各車両に設けられた摩擦クラッチC/Tの実際のミート開始点及びリリース開始点は、摩擦クラッチC/Tの個体誤差や摩擦プレートの摩耗等によって異なり得る。
図4は、図3に示すマップに使用されるミート開始点a’及びリリース開始点b’が実際のミート開始点a及びリリース開始点bからずれている場合の一例を示す。図5は、図4に示すようにミート開始点及びリリース開始点がずれている場合における作動の一例を示す。
図5に示す例では、時刻t1以前にて、車両がEGトルク(>0)及びMGトルク(>0)を利用して2速で走行している。時刻t1以降、2速から3速へのシフトアップ作動のため、アクセルペダルAP、クラッチペダルCP、及びシフトレバーSLが連携しながら操作されている。
また、時刻t1以降、クラッチ戻しストロークが図5に示すように変化することにより、時刻t2にてクラッチ戻しストロークが実際のリリース開始点bを通過し、且つ、時刻t3にてクラッチ戻しストロークが実際のミート開始点aを通過している。一方、時刻t2’にてクラッチ戻しストロークが図3のマップに使用されるリリース開始点b’を通過し、且つ、時刻t3’にてクラッチ戻しストロークが図3のマップに使用されるミート開始点a’を通過している。
ここで、実際のミート開始点及びリリース開始点は、摩擦クラッチC/Tを介して駆動輪側に伝達されるEGトルクがクラッチペダル操作に基づいて変化する際の変化タイミングに大きく影響を与える。即ち、図5に示す例では、時刻t2,t3にて、摩擦クラッチC/Tを介して駆動輪側に伝達されるEGトルクの変化タイミングが到来する。
一方、図3のマップに使用されるミート開始点及びリリース開始点は、駆動輪側に伝達されるMGトルクがクラッチペダル操作に基づいて変化する際の変化タイミングに大きく影響を与える。具体的には、図5に示すように、時刻t2’,t3’にて、駆動輪側に伝達されるMGトルクの変化タイミングが到来している。
従って、図5に示した例では、クラッチペダル操作に基づいて変化するEGトルク及びMGトルクのそれぞれの変化タイミングの間にずれが生じている(t2’〜t2、t3’〜t3)。このずれは運転者に違和感を与えることに繋がる。
そこで、本装置では、実際のミート開始点及び実際のリリース開始点が検出され、図3に示すマップに使用されるミート開始点及びリリース開始点が、検出された実際のミート開始点及び実際のリリース開始点にそれぞれ一致するように較正され、且つ、ECU内のメモリに記憶される。以下、実際のミート開始点及び実際のリリース開始点の検出について簡単に説明する。
(実際のミート開始点の検出)
実際のミート開始点の検出は、例えば、クラッチC/Tが完全分断状態にあるときに開始される。クラッチC/Tが完全分断状態にあることは、例えば、クラッチ操作量センサS1により検出されるクラッチ戻しストロークが所定値未満であること、或いは、クラッチペダルC/Pが所定量以上踏みこまれた場合にON状態となるスイッチがON状態になっていること、等に基づいて判定され得る。加えて、実際のミート開始点の検出は、車両の発進時、或いは、シフト操作時など、センサS6により検出されるE/Gの出力軸の回転速度NeとセンサS7により検出されるM/Tの入力軸の回転速度Niとの差が所定値を超えているときに開始され得る。
実際のミート開始点の検出は、例えば、クラッチC/Tが完全分断状態にあるときに開始される。クラッチC/Tが完全分断状態にあることは、例えば、クラッチ操作量センサS1により検出されるクラッチ戻しストロークが所定値未満であること、或いは、クラッチペダルC/Pが所定量以上踏みこまれた場合にON状態となるスイッチがON状態になっていること、等に基づいて判定され得る。加えて、実際のミート開始点の検出は、車両の発進時、或いは、シフト操作時など、センサS6により検出されるE/Gの出力軸の回転速度NeとセンサS7により検出されるM/Tの入力軸の回転速度Niとの差が所定値を超えているときに開始され得る。
実際のミート開始点は、運転者により実際に実行されたクラッチペダルCPの操作から得られるクラッチ戻しストロークの時間に対する変化パターンに基づいて検出され得る。具体的には、例えば、クラッチ戻しストロークが或る範囲内において増大する過程において、クラッチ戻しストロークの増加勾配が「所定値以上の第1勾配」(図5のg3を参照)→「所定値未満の第2勾配」(図5のg4を参照)→「所定値以上の第3勾配」(図5のg5を参照)となるように推移したことが検出された場合、実際のミート開始点が、第1、第2勾配の境界に対応する第1クラッチ戻しストローク(図5の点eを参照)、又は、第2、第3勾配の境界に対応する第2クラッチ戻しストローク(図5の点fを参照)に基づいて決定される。実際のミート開始点は、第1クラッチ戻しストロークそのもの(時刻t3を参照)、第2クラッチ戻しストロークそのもの(時刻t4を参照)、第1、第2クラッチ戻しストロークの平均等に決定される。
或いは、実際のミート開始点は、E/Gの出力軸の回転速度Ne、及びM/Tの入力軸の回転速度Niの少なくとも1つの変化パターンに基づいて検出され得る。具体的には、例えば、クラッチ戻しストロークが或る範囲内においてNiの勾配が増加側に急激に変化した場合、実際のミート開始点は、Niの勾配が増加側に急激に変化した時点に対応するクラッチ戻しストローク(時刻t3を参照)に決定される。或いは、クラッチ戻しストロークが或る範囲内においてNeの勾配が減少側に急激に変化した場合、実際のミート開始点は、Neの勾配が減少側に急激に変化した時点に対応するクラッチ戻しストローク(時刻t3を参照)に決定される。或いは、実際のミート開始点は、クラッチ戻しストロークが或る範囲内において車両の前後加速度が増加側に急激に変化した場合、実際のミート開始点は、前後加速度が増加側に急激に変化した時点に対応するクラッチ戻しストロークに決定される。
(実際のリリース開始点の検出)
実際のリリース開始点の検出は、例えば、クラッチC/Tが完全接合状態にあるときに開始される。クラッチC/Tが完全接合状態にあることは、例えば、クラッチ操作量センサS1により検出されるクラッチ戻しストロークが所定値以上であること、或いは、クラッチペダルC/Pが所定量以上踏みこまれた場合にON状態となるスイッチがOFF状態になっていること、等に基づいて判定され得る。加えて、実際のリリース開始点の検出は、車両の発進直前、或いは、シフト操作直前など、センサS6により検出されるE/Gの出力軸の回転速度NeとセンサS7により検出されるM/Tの入力軸の回転速度Niとの差が所定値未満であるときに開始される。
実際のリリース開始点の検出は、例えば、クラッチC/Tが完全接合状態にあるときに開始される。クラッチC/Tが完全接合状態にあることは、例えば、クラッチ操作量センサS1により検出されるクラッチ戻しストロークが所定値以上であること、或いは、クラッチペダルC/Pが所定量以上踏みこまれた場合にON状態となるスイッチがOFF状態になっていること、等に基づいて判定され得る。加えて、実際のリリース開始点の検出は、車両の発進直前、或いは、シフト操作直前など、センサS6により検出されるE/Gの出力軸の回転速度NeとセンサS7により検出されるM/Tの入力軸の回転速度Niとの差が所定値未満であるときに開始される。
実際のリリース開始点は、運転者により実際に実行されたクラッチペダルCPの操作から得られるクラッチ戻しストロークの時間に対する変化パターンに基づいて検出され得る。具体的には、例えば、クラッチ戻しストロークが或る範囲内において減少する過程において、クラッチ戻しストロークの減少勾配が「所定値未満の第1勾配」(図5のg1を参照)→「所定値以上の第2勾配」(図5のg2を参照)となるように推移したことが検出された場合、実際のリリース開始点が、第1、第2勾配の境界に対応するクラッチ戻しストローク(図5の点d、時刻t2を参照)等に決定される。
或いは、実際のリリース開始点は、E/Gの出力軸の回転速度Ne、及びM/Tの入力軸の回転速度Niの少なくとも1つの変化パターンに基づいて検出され得る。具体的には、例えば、クラッチ戻しストロークが或る範囲内においてNiとNeとの差が発生した場合、実際のリリース開始点は、NiとNeとの差が発生した時点に対応するクラッチ戻しストローク(時刻t2を参照)に決定される。或いは、実際のリリース開始点は、クラッチ戻しストロークが或る範囲内において車両の前後加速度が減少側に急激に変化した場合、実際のリリース開始点は、前後加速度が減少側に急激に変化した時点に対応するクラッチ戻しストロークに決定される。
(ミート開始点及びリリース開始点の較正)
上記のように、実際のミート開始点及びリリース開始点が検出されると、本装置は、図3に示すマップに使用されるミート開始点及びリリース開始点を、検出された実際のミート開始点及び実際のリリース開始点にそれぞれ一致するように較正する。
上記のように、実際のミート開始点及びリリース開始点が検出されると、本装置は、図3に示すマップに使用されるミート開始点及びリリース開始点を、検出された実際のミート開始点及び実際のリリース開始点にそれぞれ一致するように較正する。
図6は、ミート開始点及びリリース開始点の較正が実行されてミート開始点及びリリース開始点がずれていない場合における図5に対応する作動の一例を示す。図6において、破線で示すMGトルクの変化は図5に示した変化(ミート開始点及びリリース開始点の較正前の変化)を示し、実線で示すMGトルクの変化はミート開始点及びリリース開始点の較正後の変化を示す。
図6から理解できるように、ミート開始点及びリリース開始点の較正によって、時刻t2,t3にて、駆動輪側に伝達されるMGトルクの変化タイミングが到来している。即ち、摩擦クラッチC/Tを介して駆動輪側に伝達されるEGトルクの変化タイミングと、駆動輪側に伝達されるMGトルクの変化タイミングとが一致している。換言すれば、クラッチペダル操作に基づいて変化するEGトルク及びMGトルクのそれぞれの変化タイミングの間のずれが消滅している。この結果、このずれに起因して運転者が受ける違和感が抑制され得る。
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、第1動力源としてE/Gが使用され、第2動力源としてM/Gが使用されているが、第1、第2動力源として共にM/Gが使用されてもよい。
また、上記実施形態では、M/Gの出力軸が(周知のギヤ列等を介して)M/Tの出力軸に動力伝達可能に接続されているが、M/Gの出力軸が(周知のギヤ列等を介して)M/Tの入力軸に動力伝達可能に接続されていてもよい。
加えて、上記実施形態では、「変速機」として、トルクコンバータを備えない手動変速機M/Tが使用されているが、トルクコンバータを備えた自動変速機が使用されてもよい。
M/T…変速機、E/G…エンジン、C/T…クラッチ、M/G…モータジェネレータ、CP…クラッチペダル、AP…アクセルペダル、S1…クラッチ操作量センサ、S2…シフト位置センサ、S3…アクセル操作量センサ、S4…ブレーキ操作量センサ、S5…車輪速度センサ、S6…回転速度センサ、S7…回転速度センサ、ECU…電子制御ユニット
Claims (5)
- 第1動力源と第2動力源とを備えた車両に適用され、
前記第1動力源の出力軸から動力が入力される入力軸と前記車両の駆動輪へ動力を出力する出力軸とを備え、前記入力軸又は前記出力軸に前記第2動力源の出力軸が接続された変速機と、
前記第1動力源の出力軸と前記変速機の入力軸との間に介装されて、運転者により操作されるクラッチ操作部材の操作量に応じて、動力が伝達されない状態である完全分断状態、滑りを伴いながら動力が伝達される半接合状態、及び、滑りを伴わずに動力が伝達される完全接合状態の何れかの状態を実現する摩擦クラッチと、
運転者により操作される前記車両を加速させるための加速操作部材の操作量を検出する第1検出手段と、
前記クラッチ操作部材の操作量を検出する第2検出手段と、
前記第1動力源の出力軸の駆動トルクである第1トルク、及び前記第2動力源の出力軸の駆動トルクである第2トルクを制御する制御手段と、
を備えた車両の動力伝達制御装置であって、
前記制御手段は、
前記加速操作部材の操作量と前記第2トルクの基準である第2トルク基準値との間の記憶された第1関係と、前記検出された加速操作部材の操作量と、に基づいて第2トルク基準値を決定する第1決定手段と、
前記クラッチ操作部材の操作量と前記第2トルクの上限を規定する第2トルク制限値との間の記憶された第2関係であって前記摩擦クラッチが前記完全分断状態から前記半接合状態へと移行するタイミングに対応する前記クラッチ操作部材の操作量であるミート開始点と、前記摩擦クラッチが前記完全接合状態から前記半接合状態へと移行するタイミングに対応する前記クラッチ操作部材の操作量であるリリース開始点とを使用して規定される第2関係と、前記検出されたクラッチ操作部材の操作量と、に基づいて第2トルク制限値を決定する第2決定手段と、
を備え、前記第2トルクを、前記決定された第2トルク基準値及び第2トルク制限値のうち小さい方の値に調整するように構成され、
前記制御手段は、
前記運転者により実際に実行された前記クラッチ操作部材の操作を利用して、実際の前記ミート開始点、及び実際の前記リリース開始点を検出する第3検出手段と、
前記検出された前記実際のミート開始点及び前記実際のリリース開始点に基づいて、前記第2関係を較正・記憶する較正手段と、
を備えた、車両の動力伝達制御装置。 - 請求項1に記載の車両の動力伝達制御装置において、
前記第2関係において、
前記クラッチ操作部材の操作量が前記ミート開始点より前記完全分断状態側の範囲では前記第2トルク制限値がゼロに維持され、前記クラッチ操作部材の操作量が前記リリース開始点より前記完全接合状態側の範囲では前記第2トルク制限値が最大値に維持され、前記クラッチ操作部材の操作量が前記ミート開始点と前記リリース開始点との間では前記クラッチ操作部材の操作量が前記ミート開始点から前記リリース開始点に向けて移動するにつれて前記第2トルク制限値がゼロから増大するように構成された、車両の動力伝達制御装置。 - 請求項1又は請求項2に記載の車両の動力伝達制御装置において、
前記第3検出手段は、
前記運転者により実際に実行された前記クラッチ操作部材の操作から得られる前記クラッチ操作部材の操作量の時間に対する変化パターンに基づいて、前記実際のミート開始点、及び前記実際のリリース開始点を検出するように構成された、車両の動力伝達制御装置。 - 請求項1又は請求項2に記載の車両の動力伝達制御装置において、
前記第3検出手段は、
前記第1動力源の出力軸の回転速度、及び前記変速機の入力軸の回転速度の少なくとも1つの変化パターンに基づいて、前記実際のミート開始点、及び前記実際のリリース開始点を検出するように構成された、車両の動力伝達制御装置。 - 請求項1乃至請求項4の何れか一項に記載の車両の動力伝達制御装置において、
前記第1動力源は内燃機関であり、前記第2動力源は電動機である、車両の動力伝達制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010273312A JP2012121433A (ja) | 2010-12-08 | 2010-12-08 | 車両の動力伝達制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010273312A JP2012121433A (ja) | 2010-12-08 | 2010-12-08 | 車両の動力伝達制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012121433A true JP2012121433A (ja) | 2012-06-28 |
Family
ID=46503379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010273312A Pending JP2012121433A (ja) | 2010-12-08 | 2010-12-08 | 車両の動力伝達制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012121433A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031075A (ja) * | 2012-08-02 | 2014-02-20 | Aisin Seiki Co Ltd | ハイブリッド駆動装置 |
| JP2014054862A (ja) * | 2012-09-11 | 2014-03-27 | Aisin Seiki Co Ltd | ハイブリッド駆動装置 |
| JP2015025547A (ja) * | 2013-07-29 | 2015-02-05 | アイシン精機株式会社 | クラッチ学習装置 |
| CN105383488A (zh) * | 2014-08-28 | 2016-03-09 | 福特环球技术公司 | 用于起动发动机的方法和系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001032922A (ja) * | 1999-07-16 | 2001-02-06 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2009006782A (ja) * | 2007-06-27 | 2009-01-15 | Nissan Motor Co Ltd | 車両の制御装置 |
| JP2010254014A (ja) * | 2009-04-22 | 2010-11-11 | Toyota Motor Corp | 車両用駆動装置 |
-
2010
- 2010-12-08 JP JP2010273312A patent/JP2012121433A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001032922A (ja) * | 1999-07-16 | 2001-02-06 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2009006782A (ja) * | 2007-06-27 | 2009-01-15 | Nissan Motor Co Ltd | 車両の制御装置 |
| JP2010254014A (ja) * | 2009-04-22 | 2010-11-11 | Toyota Motor Corp | 車両用駆動装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031075A (ja) * | 2012-08-02 | 2014-02-20 | Aisin Seiki Co Ltd | ハイブリッド駆動装置 |
| JP2014054862A (ja) * | 2012-09-11 | 2014-03-27 | Aisin Seiki Co Ltd | ハイブリッド駆動装置 |
| JP2015025547A (ja) * | 2013-07-29 | 2015-02-05 | アイシン精機株式会社 | クラッチ学習装置 |
| CN104343973A (zh) * | 2013-07-29 | 2015-02-11 | 爱信精机株式会社 | 离合器自学习装置 |
| CN105383488A (zh) * | 2014-08-28 | 2016-03-09 | 福特环球技术公司 | 用于起动发动机的方法和系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5096552B2 (ja) | 車両の動力伝達制御装置 | |
| JP5521151B2 (ja) | 車両の動力伝達制御装置 | |
| JP5367682B2 (ja) | 車両の動力伝達制御装置 | |
| JP2012031970A (ja) | 車両の動力伝達制御装置 | |
| US8725336B2 (en) | Power transmission control device for vehicle | |
| JP5422544B2 (ja) | 車両の動力伝達制御装置 | |
| JP5769956B2 (ja) | 車両の動力伝達制御装置 | |
| EP2548780A2 (en) | Power transmission control device for vehicle | |
| JP5715848B2 (ja) | 車両の動力伝達制御装置 | |
| JP2012121433A (ja) | 車両の動力伝達制御装置 | |
| US8758194B2 (en) | Power transmission control device for vehicle | |
| JP5409526B2 (ja) | 車両の動力伝達制御装置 | |
| JP5462057B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013053727A (ja) | 車両の動力伝達制御装置 | |
| JP5662075B2 (ja) | 車両の動力伝達制御装置 | |
| JP5226847B2 (ja) | 車両の動力伝達制御装置 | |
| WO2012077382A1 (ja) | 車両の動力伝達制御装置 | |
| JP2008298025A (ja) | 車両用駆動力制御装置 | |
| JP5650262B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013047538A (ja) | 車両の動力伝達制御装置 | |
| JP2013053726A (ja) | 車両の動力伝達制御装置 | |
| JP2012153244A (ja) | 車両の動力伝達制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131210 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140507 |