JP2012112953A - 回転レーザ装置および回転レーザ装置の方向の設定方法 - Google Patents
回転レーザ装置および回転レーザ装置の方向の設定方法 Download PDFInfo
- Publication number
- JP2012112953A JP2012112953A JP2011254069A JP2011254069A JP2012112953A JP 2012112953 A JP2012112953 A JP 2012112953A JP 2011254069 A JP2011254069 A JP 2011254069A JP 2011254069 A JP2011254069 A JP 2011254069A JP 2012112953 A JP2012112953 A JP 2012112953A
- Authority
- JP
- Japan
- Prior art keywords
- laser
- unit
- laser device
- axis
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
- G01C15/004—Reference lines, planes or sectors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Conveying And Assembling Of Building Elements In Situ (AREA)
- Laser Beam Processing (AREA)
Abstract
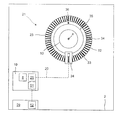
【解決手段】回転レーザ装置(1)に、レーザビーム(5)を生成するレーザユニット(3)、レーザビーム(5)を地上の重力場に対し直交する水平面(X,Y)に方向設定する整準ユニット(14)、レーザビーム(5)を、傾斜方向(X方向)に、水平面(X,Y)に対して相対的に、傾斜させる傾斜ユニット(17)、レーザユニット(3)を少なくとも部分的に、回転軸(4)の回りに所定回転速度で動かす回転ユニット(9)、および、レーザユニット(3)の回転軸(4)の回りの回転角度を算出する測定ユニット(21)を設け、少なくとも1つの角度位置(α1,α2,Γ)を保存するためのデータ保存ユニット(22;31;51)を設ける。
【選択図】図1
Description
レーザ平面を、X方向およびY方向の双方に傾ける傾斜ユニットを備える回転レーザ装置は、他の用途に用いられる。
2 ハウジング
3 レーザユニット
4 回転軸
5 レーザビーム
6 光源
7 ビーム形成光学系
8 第一制御ユニット
9 回転ユニット
10 シャフト
11 モータユニット
12 伝動ユニット
13 第二制御ユニット
14 整準ユニット
15a 第一整準サブユニット
15b 第二整準サブユニット
16 第三制御ユニット
17 傾斜ユニット
18 第四制御ユニット
19 コントロールユニット
21 測定ユニット
22 データ保存ユニット
23 計測板
24 スキャンユニット
25 評価・制御ユニット
26 対象面
27 レーザ受光器
28 通信リンク
29 操作ユニット
31 機械的データ保存ユニット
32 明ストライプ
33 暗ストライプ
39 参照要素
40 参照要素
41 参照要素
51 電子的データ保存ユニット
52 入力ユニット
71 表示ユニット
72 第一表示素子
73 第三表示素子
74 第二表示素子
81 自動調整ユニット
Claims (16)
- レーザビーム(5)を生成するレーザユニット(3)、
前記レーザビーム(5)が、重力方向に対して直交する水平面(X,Y)内に向くようレベル調整する整準ユニット(14)、
前記レーザビーム(5)を、前記水平面(X,Y)に対して、傾斜方向(X軸方向)に傾斜させる傾斜ユニット(17)、
前記レーザユニット(3)を、所定回転速度で、回転軸(4)の回りを少なくとも部分的に回転させる回転ユニット(9)、および、
前記レーザユニット(3)の前記回転軸(4)の回りの回転角度を算出することのできる測定ユニット(21)、
を有する該回転レーザ装置(1)において、
前記回転角度における、少なくとも1つの角度位置(α1,α2,Γ)を保存するためのデータ保存ユニット(22;31;51)を備えていることを特徴とする回転レーザ装置(1)。 - 請求項1記載の回転レーザ装置において、前記レーザビーム(5)の少なくとも1つのビーム特性を、前記回転角度に依存して設定する制御ユニット(8)を備えていることを特徴とする回転レーザ装置。
- 請求項1または2記載の回転レーザ装置において、前記データ保存ユニットは機械的データ保存ユニット(31)として構成され、少なくとも1つの参照要素(39,40,41)の形態で前記測定ユニット(21)の計測板(23)に取り付けられたものであることを特徴とする回転レーザ装置。
- 請求項1または2記載の回転レーザ装置において、前記データ保存ユニットは電子的データ保存ユニット(51)として構成されていることを特徴とする回転レーザ装置。
- 請求項4記載の回転レーザ装置において、前記データ保存ユニット(51)は、入力ユニット(52)と接続されていることを特徴とする回転レーザ装置。
- 請求項1〜5のうちいずれか一項記載の回転レーザ装置において、前記回転レーザ装置(1)自体を、前記回転軸(4)回りに方向調整することのできる自動調整ユニット(81)が備えられていることを特徴とする回転レーザ装置。
- 請求項1〜6のうちいずれか一項記載の回転レーザ装置において、第一表示素子(72)および第二表示素子(74)を有する表示ユニット(71)が備えられていることを特徴とする回転レーザ装置。
- 請求項1〜7のうちいずれか一項記載の回転レーザ装置において、レーザ受光器(27)が備えられており、該レーザ受光器(27)は、通信リンク(28)を介して前記回転レーザ装置(1)と接続可能であり、また、該レーザ受光器(27)は、前記レーザビーム(5)の少なくとも1つのビーム特性、および/または、前記レーザビーム(5)の時間間隔(T1,T2)を算出するように構成されたものであることを特徴とする回転レーザ装置。
- 回転レーザ装置(1)の方向を設定するに際し、レーザビーム(5)を、傾斜ユニット(17)により、重力方向と直交する水平面(X,Y)に対して、傾斜方向(X軸方向)に傾けて、
前記回転レーザ装置(1)を、回転軸(4)の回りに、前記傾斜方向(X軸方向)が所与の傾斜方向(75)に平行に向くような角度位置(Γ)へ回転させて、回転レーザ装置(1)の方向を設定する方法において、
前記傾斜方向(X軸方向)が所与の傾斜方向(75)に平行に向く前記角度位置(Γ)をデータ保存ユニット(22;31;51)に保存することを特徴とする方法。 - 請求項9記載の方法において、前記レーザビーム(5)を、所定回転速度で前記回転軸(4)の回りに回転し、前記レーザビーム(5)の前記回転軸(4)の回りの回転角度を測定ユニット(21)により取得して、前記レーザビーム(5)の少なくとも1つのビーム特性を前記回転角度に応じて設定することを特徴とする方法。
- 請求項10記載の方法において、前記レーザビーム(5)の前記少なくとも1つのビーム特性を、前記回転角度が、零点位置(0°)から開始して前記角度位置(Γ)に到達した際には第一値(F1)から第二値(F2)に、零点位置(0°)に到達した際には前記第二値(F2)から前記第一値(F1)に変更することを特徴とする方法。
- 請求項10記載の方法において、前記少なくとも1つの保存された角度位置(Γ)に基づいて、第一回転角度(Γ−Δγ)および第二回転角度(Γ+Δγ)を設定し、前記レーザビーム(5)の少なくとも1つのビーム特性を、前記レーザユニット(3)の前記回転角度に応じて制御し、前記少なくとも1つのビーム特性を、前記回転角度が、零点位置(0°)から開始して前記第一回転角度(Γ−Δγ)に到達した際には、第一値(F1)から第二値(F2)に、前記第二回転角度(Γ+Δγ)に到達した際には前記第二値(F2)から第三値(F3)に、零点位置(0°)に到達した際には前記第三値(F3)から前記第一値(F1)に変更することを特徴とする方法。
- 請求項9記載の方法において、前記レーザユニット(3)を、第一折返し点(W1)と第二折返し点(W2)との間を、前記回転軸(4)を軸として往復運動させることを特徴とする方法。
- 請求項9〜13のうちいずれか一項記載の方法において、前記レーザビーム(5)をレーザ受光器(27)により受光し、前記レーザビーム(5)の前記少なくとも1つのビーム特性および/または前記レーザビーム(5)の時間間隔(T1,T2)を、前記レーザ受光器(27)により算出することを特徴とする方法。
- 請求項14記載の方法において、前記レーザビーム(5)の前記少なくとも1つのビーム特性および/または時間間隔(T1,T2)から、操作者用調整指令を生成し、前記調整指令を表示ユニット(71)に表示することを特徴とする方法。
- 請求項9記載の方法において、前記少なくとも1つの保存された角度位置(Γ)を自動調整ユニット(81)に伝達し、前記自動調整ユニット(81)により、前記回転レーザ装置(1)を、前記保存された角度位置(Γ)へ前記回転軸(4)の回りに少なくとも部分的に回転させることを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010061725.3 | 2010-11-22 | ||
| DE102010061725A DE102010061725A1 (de) | 2010-11-22 | 2010-11-22 | Rotationslasergerät mit einer geneigten Laserebene und Verfahren zur Ausrichtung eines Rotationslasergerätes |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012112953A true JP2012112953A (ja) | 2012-06-14 |
Family
ID=44799877
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011254069A Pending JP2012112953A (ja) | 2010-11-22 | 2011-11-21 | 回転レーザ装置および回転レーザ装置の方向の設定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8869411B2 (ja) |
| EP (1) | EP2455711A3 (ja) |
| JP (1) | JP2012112953A (ja) |
| DE (1) | DE102010061725A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015068743A (ja) * | 2013-09-30 | 2015-04-13 | 株式会社トプコン | 回転レーザ出射装置およびレーザ測量システム |
| WO2017146115A1 (ja) * | 2016-02-22 | 2017-08-31 | 株式会社マキタ | レーザー墨出し器 |
| JP2019519788A (ja) * | 2016-06-30 | 2019-07-11 | ヒルティ アクチエンゲゼルシャフト | レーザー受信機に入射する受信ビームと回転レーザービームを比較するための方法 |
| JP2019519789A (ja) * | 2016-06-30 | 2019-07-11 | ヒルティ アクチエンゲゼルシャフト | レーザー受信機に入射する受信ビームと回転レーザービームとを比較するための方法 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010031634A1 (de) * | 2010-07-21 | 2012-01-26 | Hilti Aktiengesellschaft | Lasergerät und Verfahren zur Einstellung der Laserleistung |
| DE102010061725A1 (de) * | 2010-11-22 | 2012-05-24 | Hilti Aktiengesellschaft | Rotationslasergerät mit einer geneigten Laserebene und Verfahren zur Ausrichtung eines Rotationslasergerätes |
| US9127935B2 (en) * | 2012-01-04 | 2015-09-08 | Chris Olexa | Laser centering tool for surface areas |
| EP3173740A1 (de) * | 2015-11-30 | 2017-05-31 | HILTI Aktiengesellschaft | Verfahren zum messen einer messentfernung zwischen einem rotationslaser und einem laserempfänger |
| GB202014590D0 (en) * | 2020-09-16 | 2020-10-28 | Stanley Works Israel | Laser tool and system |
| CN116391107A (zh) | 2020-12-01 | 2023-07-04 | 米沃奇电动工具公司 | 激光水平仪接口和控制件 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05288547A (ja) * | 1992-04-14 | 1993-11-02 | Kajima Corp | 構造物等の三次元的な位置決め及び形状測定方法 |
| JPH09257478A (ja) * | 1996-03-19 | 1997-10-03 | Topcon Corp | レーザ測量機 |
| JP2001105356A (ja) * | 1999-10-08 | 2001-04-17 | Yurtec Corp | 墨出し装置 |
| JP2005024450A (ja) * | 2003-07-04 | 2005-01-27 | Sokkia Co Ltd | レーザ測量機 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH032513A (ja) * | 1989-05-30 | 1991-01-08 | Tatsushi Miyahara | 自動測量装置 |
| US5402223A (en) | 1992-09-24 | 1995-03-28 | Smart Grade Incorporated | Electronic survey stadia |
| DE4324478A1 (de) | 1993-07-21 | 1995-01-26 | Ralf Dr Hinkel | Rotationslaser mit verbesserter Sichtbarkeit |
| JP3483303B2 (ja) * | 1994-06-21 | 2004-01-06 | 株式会社トプコン | 回転レーザ装置 |
| EP0722080B1 (en) | 1995-01-11 | 2000-03-15 | Kabushiki Kaisha Topcon | Laser levelling device |
| US6171018B1 (en) * | 1997-11-10 | 2001-01-09 | Kabushiki Kaisha Topcon | Automatic control system for construction machinery |
| EP1001251A1 (de) * | 1998-11-10 | 2000-05-17 | Leica Geosystems AG | Laser-Positionier-System |
| JP4356050B2 (ja) * | 2000-12-28 | 2009-11-04 | 株式会社トプコン | 測量装置と電子的記憶媒体 |
| JP3816807B2 (ja) | 2002-01-21 | 2006-08-30 | 株式会社トプコン | 位置測定装置及びそれに使用する回転レーザ装置 |
| JP2004093504A (ja) * | 2002-09-03 | 2004-03-25 | Topcon Corp | 測量装置 |
| JP4354343B2 (ja) | 2004-06-15 | 2009-10-28 | 株式会社トプコン | 位置測定システム |
| CN101535764B (zh) | 2006-11-03 | 2013-01-16 | 特林布尔凯泽斯劳滕有限公司 | 倾斜度指示设备和方法 |
| JP5207665B2 (ja) | 2007-06-08 | 2013-06-12 | 株式会社トプコン | 測定システム |
| EP2053353A1 (de) | 2007-10-26 | 2009-04-29 | Leica Geosystems AG | Distanzmessendes Verfahren und ebensolches Gerät |
| EP2144037A1 (en) * | 2008-07-10 | 2010-01-13 | Leica Geosystems AG | Construction laser, in particular a self-compensating rotating construction laser, and method for measuring a tilt of an axis of rotation of a construction laser |
| JP5456532B2 (ja) * | 2010-03-25 | 2014-04-02 | 株式会社トプコン | 回転レーザ装置及び回転レーザシステム |
| US8943701B2 (en) * | 2010-06-28 | 2015-02-03 | Trimble Navigation Limited | Automated layout and point transfer system |
| DE102010031634A1 (de) | 2010-07-21 | 2012-01-26 | Hilti Aktiengesellschaft | Lasergerät und Verfahren zur Einstellung der Laserleistung |
| DE102010061725A1 (de) * | 2010-11-22 | 2012-05-24 | Hilti Aktiengesellschaft | Rotationslasergerät mit einer geneigten Laserebene und Verfahren zur Ausrichtung eines Rotationslasergerätes |
| DE102010061726A1 (de) * | 2010-11-22 | 2012-05-24 | Hilti Aktiengesellschaft | Rotationslasergerät und Verfahren zur Steuerung eines Laserstrahls |
-
2010
- 2010-11-22 DE DE102010061725A patent/DE102010061725A1/de not_active Ceased
-
2011
- 2011-10-18 EP EP11185633.2A patent/EP2455711A3/de not_active Ceased
- 2011-11-18 US US13/300,339 patent/US8869411B2/en active Active
- 2011-11-21 JP JP2011254069A patent/JP2012112953A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05288547A (ja) * | 1992-04-14 | 1993-11-02 | Kajima Corp | 構造物等の三次元的な位置決め及び形状測定方法 |
| JPH09257478A (ja) * | 1996-03-19 | 1997-10-03 | Topcon Corp | レーザ測量機 |
| JP2001105356A (ja) * | 1999-10-08 | 2001-04-17 | Yurtec Corp | 墨出し装置 |
| JP2005024450A (ja) * | 2003-07-04 | 2005-01-27 | Sokkia Co Ltd | レーザ測量機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015068743A (ja) * | 2013-09-30 | 2015-04-13 | 株式会社トプコン | 回転レーザ出射装置およびレーザ測量システム |
| WO2017146115A1 (ja) * | 2016-02-22 | 2017-08-31 | 株式会社マキタ | レーザー墨出し器 |
| JP2019519788A (ja) * | 2016-06-30 | 2019-07-11 | ヒルティ アクチエンゲゼルシャフト | レーザー受信機に入射する受信ビームと回転レーザービームを比較するための方法 |
| JP2019519789A (ja) * | 2016-06-30 | 2019-07-11 | ヒルティ アクチエンゲゼルシャフト | レーザー受信機に入射する受信ビームと回転レーザービームとを比較するための方法 |
| US10823566B2 (en) | 2016-06-30 | 2020-11-03 | Hilti Aktiengesellschaft | Method for comparing a received beam hitting a laser receiver with a rotating laser beam |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2455711A2 (de) | 2012-05-23 |
| DE102010061725A1 (de) | 2012-05-24 |
| EP2455711A3 (de) | 2014-07-02 |
| US20120124851A1 (en) | 2012-05-24 |
| US8869411B2 (en) | 2014-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012112953A (ja) | 回転レーザ装置および回転レーザ装置の方向の設定方法 | |
| EP3171130B1 (en) | Surveying instrument | |
| US10684129B2 (en) | Method for checking and/or calibrating a horizontal axis of a rotating laser | |
| CN105424011B (zh) | 测量装置以及测量装置的设置方法 | |
| US10697796B2 (en) | Method for checking and/or calibrating a vertical axis of a rotating laser | |
| JP6675485B2 (ja) | 回転レーザのコーンエラーを検査する方法 | |
| US7861427B2 (en) | Grade indicating device and method | |
| JP6553999B2 (ja) | ポリゴンミラーとファンビーム出力装置と測量システム | |
| US11953322B2 (en) | Method for checking and/or calibrating a horizontal axis of a rotating laser | |
| KR20130087031A (ko) | 수평으로 연장하는 컨투어 라인들을 따라 공간 지점들을 측정하고 마킹하는 장치 | |
| WO2012013280A1 (en) | Device for optically scanning and measuring an environment | |
| JP2019100915A (ja) | 測量装置、測量装置の校正方法および測量装置の校正用プログラム | |
| US10564265B2 (en) | Measurement device and measurement method | |
| JP4996371B2 (ja) | 測量機用自動整準装置 | |
| JP6864653B2 (ja) | 鉛直測定システム及び基準点のトレース方法 | |
| JP2016050775A (ja) | 測定装置および傾斜センサ装置 | |
| US8863396B2 (en) | Rotary laser device and method for controlling a laser beam | |
| US6693706B2 (en) | Laser reference system and method of determining grade rake | |
| KR20190053747A (ko) | 원거리 계측기 | |
| US11448504B2 (en) | Surveying device | |
| US20210285766A1 (en) | Optical surveying instrument with movable mirror | |
| US8605274B2 (en) | Laser reference system | |
| JP2010156659A (ja) | レーザー墨出し器の校正方法、校正プログラムおよび電子ジャイロ方式レーザー墨出し器 | |
| JP2006292497A (ja) | 測量装置およびその取扱方法 | |
| US11674800B2 (en) | Laser level meter and use method therefor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141001 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150819 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151118 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151218 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160118 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160427 |