JP2012105948A - カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法 - Google Patents
カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法 Download PDFInfo
- Publication number
- JP2012105948A JP2012105948A JP2011110746A JP2011110746A JP2012105948A JP 2012105948 A JP2012105948 A JP 2012105948A JP 2011110746 A JP2011110746 A JP 2011110746A JP 2011110746 A JP2011110746 A JP 2011110746A JP 2012105948 A JP2012105948 A JP 2012105948A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- ultrasound
- image
- data
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【課題】カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法を提供すること。
【解決手段】本発明における医療システムは、対象体内に挿入されて前記対象体内の病巣を除去するためのニードル(needle)および前記ニードルに振動を印加する振動印加部を含む医療用器具と、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて複数の超音波映像を形成し、前記複数の超音波映像のそれぞれにモーショントラッキング(motion tracking)を行って前記ニードルの位置を検出し、前記検出されたニードルの位置に基づいて超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行うプロセッサとを備える。
【選択図】図1
【解決手段】本発明における医療システムは、対象体内に挿入されて前記対象体内の病巣を除去するためのニードル(needle)および前記ニードルに振動を印加する振動印加部を含む医療用器具と、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて複数の超音波映像を形成し、前記複数の超音波映像のそれぞれにモーショントラッキング(motion tracking)を行って前記ニードルの位置を検出し、前記検出されたニードルの位置に基づいて超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行うプロセッサとを備える。
【選択図】図1
Description
本発明は、医療システムに関し、特に、カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法に関する。
医療技術が発達するによって直接切開せず、人体の最小部位のみ穴をあけた後、映像を見て病変がある部位にアブレータ(Ablator)またはバイオプシー(Biopsy)などの医療用器具(すなわち、ニードル(needle))を挿入して治療や検査をする技術が用いられている。このような方法は医学映像装備で人体の内部を観察しながら施術を行うため、「映像を用いる施術法」または「カテーテル施術」という。
すなわち、カテーテル施術は、放射線科で使用する映像装備であるCTスキャナ、あるいはMRIシステムなどから得た映像を施術中に見ながら、皮膚を通じて医療用針を、検査を望む部位または治療を望む病変に直接到達させて診断や治療をする施術をいう。このカテーテル施術法は、一般に切開が必要な外科治療と比較する時、全身麻酔が必要なく、患者の身体的な負担が少なく、痛みや苦痛が少なく、入院期間も短縮され、日常への復帰が早くなり、医療費用と効果面でも大いに役立っている。
しかし、CTスキャナやMRIシステムを使用する場合、リアルタイムで映像を得難く、特にCTスキャナを用いてカテーテル施術をする場合、施術者や患者のいずれも長時間放射線に露出される危険がある。これに比べて、超音波システムの場合、リアルタイムで映像を得ることができ、人体にほぼ無害である。しかし、超音波映像は病巣(lesion)だけでなく医療用器具(すなわち、ニードル(needle))を明確に分別することは難しく、カテーテル施術に用いるのには多くの困難がある。
本発明の課題は、カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法を提供することにある。
本発明における医療システムは、対象体内に挿入されて前記対象体内の病巣を除去するためのニードル(needle)および前記ニードルに振動を印加する振動印加部を含む医療用器具と、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて複数の超音波映像を形成し、前記複数の超音波映像のそれぞれにモーショントラッキング(motion tracking)を行って前記ニードルの位置を検出し、前記検出されたニードルの位置に基づいて超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行うプロセッサとを備える。
また、本発明における医療システムは、対象体内に挿入されて前記対象体内の病巣を除去するためのニードルを含む医療用器具と、基準ステアリング角度および該基準ステアリング角度に対する複数のステアリング角度に基づいて、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、前記基準ステアリング角度に対応する第1の超音波データと、前記複数のステアリング角度のそれぞれに対応する第2の超音波データとを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記第1の超音波データおよび前記第2の超音波データを用いて前記第1の超音波データに対応する基準超音波映像および前記第2の超音波データに対応する複数のサブ超音波映像を形成し、前記複数のサブ超音波映像のそれぞれに前記ニードルの輪郭検出を行って前記複数のサブ超音波映像のうちのいずれか1つのサブ超音波映像を抽出し、前記基準超音波映像および前記抽出されたサブ超音波映像の表示を制御するプロセッサとを備える。
また、本発明における医療システムは、液体が流れる管を含むニードルと、前記管に前記液体が一定の速度で流れるように前記液体を提供する液体提供部とを含む医療用器具と、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いてBモード(brightness mode)映像を形成し、前記超音波データを用いて前記液体の流れに対応するカラードップラ映像を形成し、前記Bモード映像と前記カラードップラ映像とを合成して合成映像を形成するプロセッサとを備える。
また、本発明における医療システムは、対象体内に挿入されて前記対象体内の病巣を除去するためのニードルを含む医療用器具と、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、位相情報を含む超音波データを取得する超音波データ取得部と、前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて超音波映像を形成し、前記位相情報を用いて位相が予め定められたしきい値を超えて反転する位相反転領域を検出し、前記検出された位相反転領域に基づいて前記超音波映像にエッジ検出を行い、前記検出されたエッジに基づいて前記超音波映像に映像処理を行うプロセッサとを備える。
また、本発明における超音波映像提供方法は、a)対象体内の病巣を除去するためのニードルを前記対象体内に挿入しながら前記ニードルに振動を印加する段階と、b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する段階と、c)前記超音波データを用いて複数の超音波映像を形成する段階と、d)前記複数の超音波映像のそれぞれにモーショントラッキングを行って前記ニードルの位置を検出する段階と、e)前記検出されたニードルの位置に基づいて前記超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行う段階とを備える。
また、本発明における超音波映像提供方法は、a)ニードルを含む医療用器具を対象体内に挿入する段階と、b)基準ステアリング角度および該基準ステアリング角度に対する複数のステアリング角度に基づいて超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、前記基準ステアリング角度に対応する第1の超音波データと、前記複数のステアリング角度のそれぞれに対応する第2の超音波データとを取得する段階と、c)前記第1の超音波データおよび前記第2の超音波データを用いて前記第1の超音波データに対応する基準超音波映像および前記第2の超音波データに対応する複数のサブ超音波映像を形成する段階と、d)前記複数のサブ超音波映像のそれぞれに前記ニードルの輪郭検出を行って前記複数のサブ超音波映像のうちのいずれか1つのサブ超音波映像を抽出する段階と、e)前記基準超音波映像および前記抽出されたサブ超音波映像の表示を制御する段階とを備える。
また、本発明における超音波映像提供方法は、a)液体が流れる管を含むニードルに対して一定の速度で流れる前記液体を前記管に提供する段階と、b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する段階と、c)前記超音波データを用いてBモード映像を形成する段階と、d)前記超音波データを用いて前記液体の流れに対応するカラードップラ映像を形成する段階と、e)前記Bモード映像と前記カラードップラ映像とを合成して合成映像を形成する段階とを備える。
また、本発明における超音波映像提供方法は、a)ニードルを含む医療用器具を対象体内に挿入する段階と、b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、位相情報を含む超音波データを取得する段階と、c)前記超音波データを用いて超音波映像を形成する段階と、d)前記位相情報を用いて位相が予め定められたしきい値を超えて反転する位相反転領域を検出する段階と、e)前記検出された位相反転領域に基づいて前記超音波映像にエッジ検出を行う段階と、f)前記検出されたエッジに基づいて前記超音波映像に映像処理を行う段階と備える。
本発明は、医療用器具、すなわち、ニードル(needle)がよく見える最適な超音波映像を提供することができ、カテーテル施術の精度および使用性を改善させることができる。
以下、添付した図面を参照して本発明の実施例を説明する。
第1の実施例
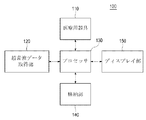
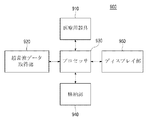
図1は、本発明の第1の実施例における医療システムの構成を示すブロック図である。図1を参照すると、医療システム100は、医療用器具110、超音波データ取得部120、プロセッサ130、格納部140およびディスプレイ部150を備える。
図1は、本発明の第1の実施例における医療システムの構成を示すブロック図である。図1を参照すると、医療システム100は、医療用器具110、超音波データ取得部120、プロセッサ130、格納部140およびディスプレイ部150を備える。
医療用器具110は、対象体内に挿入されて対象体内の病巣(lesion)を除去する。本実施例において、医療用器具110は、対象体内に挿入されて対象体内の病巣を除去するためのニードル(needle)(図示せず)と、ニードルに振動を印加するための振動印加部(図示せず)とを備える。
超音波データ取得部120は、超音波信号を対象体に送信し、対象体から反射される超音波信号(すなわち、超音波エコー信号)を受信して超音波データを取得する。
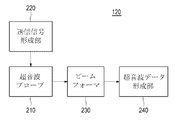
図2は、本発明の第1の実施例における超音波データ取得部の構成を示すブロック図である。図2を参照すると、超音波データ取得部120は、超音波プローブ210、送信信号形成部220、ビームフォーマ230および超音波データ形成部240を備える。
超音波プローブ210は、電気的信号と超音波信号を相互変換する複数の電気音響変換素子(transducer element:以下、単に変換素子と呼ぶ)(図示せず)を含む。超音波プローブ210は、複数のスキャンライン(scanline)(図示せず)それぞれに沿って超音波信号を対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。受信信号は、アナログ信号である。超音波プローブ210は、コンベックスプローブ(convex probe)、リニアプローブ(linear probe)などを含む。
送信信号形成部220は、超音波信号の送信を制御する。また、送信信号形成部220は、変換素子および集束点を考慮して、超音波映像を得るための送信信号を形成する。送信信号は、低周波(例えば2〜5MHz)送信信号または高周波(10MHz以上)送信信号を形成する。本実施例において、送信信号形成部220は、図3に示すように、複数の超音波映像(UIi(1≦i))のそれぞれを得るための送信信号を順次形成する。従って、超音波プローブ210は、送信信号形成部220から送信信号が提供されると、送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。このとき、超音波信号は、低周波超音波信号または高周波超音波信号を含む。
ビームフォーマ230は、超音波プローブ210から提供される受信信号をアナログデジタル変換してデジタル信号を形成する。また、ビームフォーマ230は、変換素子および集束点を考慮して、デジタル信号を受信集束させて受信集束信号を形成する。
超音波データ形成部240は、ビームフォーマ230から提供される受信集束信号を用いて、超音波映像に対応する超音波データを形成する。超音波データは、RF(radio frequency)データを含む。しかし、超音波データは、必ずしもこれに限定されない。また、超音波データ形成部240は、超音波データを形成するのに必要な様々な信号処理(例えば、利得(gain)調節など)を受信集束信号に行うこともできる。
再び図1を参照すると、プロセッサ130は、医療用器具110および超音波データ取得部120に連結される。プロセッサ130は、CPU(central processing unit)、マイクロプロセッサ(micro processor)、GPU(graphic processing unit)などを含む。
図4は、本発明の第1の実施例によって、カテーテル施術のための最適な超音波映像を提供する順序を示すフローチャートである。図4を参照すると、プロセッサ130は、超音波データ取得部120から超音波データが提供されると、超音波データを用いて超音波映像を形成する(S402)。
プロセッサ130は、超音波映像にモーショントラッキング(motion tracking)を行って(S404)、超音波映像から医療用器具110(すなわち、ニードル)の位置を検出する(S406)。モーショントラッキングおよびニードルの位置検出は、公知の様々な方法を用いて行われることができるため、本実施例では詳細に説明しない。
プロセッサ130は、検出された医療器具110の位置に基づいて超音波映像に映像処理を行って、超音波映像の画質を改善させる(S408)。プロセッサ130は、全ての超音波映像に対して上述と同様な過程を行う(S410)。
再び図1を参照すると、格納部140は、超音波データ取得部120で取得した超音波データを格納する。また、格納部140は、プロセッサ130で形成された超音波映像を格納することもできる。
ディスプレイ部150は、プロセッサ130で形成された超音波映像を表示する。
以上のような医療システム100により、対象体内の病巣を超音波映像で確認しながら、医療用器具110で該病巣を除去することができる。
第2の実施例
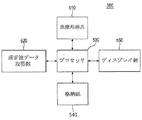
図5は、本発明の第2の実施例における医療システムの構成を示すブロック図である。図5を参照すると、医療システム500は、医療用器具510、超音波データ取得部520、プロセッサ530、格納部540およびディスプレイ部550を備える。
図5は、本発明の第2の実施例における医療システムの構成を示すブロック図である。図5を参照すると、医療システム500は、医療用器具510、超音波データ取得部520、プロセッサ530、格納部540およびディスプレイ部550を備える。
医療用器具510は、対象体内に挿入されて対象体内の病巣を除去する。本実施例において、医療用器具510は、対象体内に挿入されて対象体内の病巣を除去するためのニードル(図示せず)を含む。
超音波データ取得部520は、超音波信号を対象体に送信し、対象体から反射される超音波信号(すなわち、超音波エコー信号)を受信して超音波データを取得する。
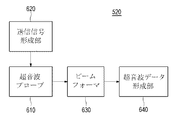
図6は、本発明の第2の実施例における超音波データ取得部の構成を示すブロック図である。図6を参照すると、超音波データ取得部520は、超音波プローブ610、送信信号形成部620、ビームフォーマ630および超音波データ形成部640を備える。
超音波プローブ610は、電気的信号と超音波信号を相互変換する複数の変換素子(図示せず)を含む。超音波プローブ610は、複数のスキャンラインのそれぞれに沿って超音波信号を対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。受信信号は、アナログ信号である。超音波プローブ610は、コンベックスプローブ(convex probe)、リニアプローブ(linear probe)などを含む。
送信信号形成部620は、超音波信号の送信を制御する。また、送信信号形成部620は、変換素子および集束点を考慮して、超音波映像を得るための送信信号を形成する。本実施例において、送信信号形成部620は、複数のスキャンラインを基準ステアリング角度でステアリングした基準超音波映像を得るための送信信号および複数のスキャンラインを基準ステアリング角度に対して複数のステアリング角度でステアリングした複数のサブ超音波映像を得るための送信信号を形成する。
一例として、送信信号形成部620は、図7に示すように、複数のスキャンラインを基準ステアリング角度でステアリングした基準超音波映像UIRを得るための第1の送信信号、複数のスキャンラインを基準ステアリング角度に対して第1のステアリング角度θ1でステアリングした第1のサブ超音波映像UI1を得るための第2の送信信号、複数のスキャンラインを基準ステアリング角度に対して第2のステアリング角度θ2でステアリングした第2のサブ超音波映像UI2を得るための第3の送信信号、複数のスキャンラインを基準ステアリング角度に対して第3のステアリング角度θ3でステアリングした第3のサブ超音波映像UI3を得るための第4の送信信号および複数のスキャンラインを基準ステアリング角度に対して第4のステアリング角度θ4でステアリングした第4のサブ超音波映像UI4を得るための第5の送信信号を形成する。
なお、本実施例において、基準ステアリング角度は、0°である。しかし、基準ステアリング角度は、必ずしもこれに限定されない。
従って、超音波プローブ610は、送信信号形成部620から第1の送信信号が提供されると、第1の送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して第1の受信信号を形成する。また、超音波プローブ610は、送信信号形成部620から第2の送信信号が提供されると、第2の送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して第2の受信信号を形成する。また、超音波プローブ610は、送信信号形成部620から第3の送信信号が提供されると、第3の送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して第3の受信信号を形成する。また、超音波プローブ610は、送信信号形成部620から第4の送信信号が提供されると、第4の送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して第4の受信信号を形成する。また、超音波プローブ610は、送信信号形成部620から第5の送信信号が提供されると、第5の送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して第5の受信信号を形成する。
上述した例では、基準ステアリング角度を基準に4つのサブ超音波映像を得るものとして説明したが、必ずしもこれに限定されない。
ビームフォーマ630は、超音波プローブ610から提供される受信信号をアナログデジタル変換してデジタル信号を形成する。また、ビームフォーマ630は、変換素子および集束点を考慮して、デジタル信号を受信集束させて受信集束信号を形成する。
一例として、ビームフォーマ630は、超音波プローブ610から第1の受信信号が提供されると、第1の受信信号をアナログデジタル変換して第1のデジタル信号を形成する。ビームフォーマ630は、変換素子および集束点を考慮して、第1のデジタル信号を受信集束させて第1の受信集束信号を形成する。また、ビームフォーマ630は、超音波プローブ610から第2の受信信号が提供されると、第2の受信信号をアナログデジタル変換して第2のデジタル信号を形成する。ビームフォーマ630は、変換素子および集束点を考慮して、第2のデジタル信号を受信集束させて第2の受信集束信号を形成する。また、ビームフォーマ630は、超音波プローブ610から第3の受信信号が提供されると、第3の受信信号をアナログデジタル変換して第3のデジタル信号を形成する。ビームフォーマ630は、変換素子および集束点を考慮して、第3のデジタル信号を受信集束させて第3の受信集束信号を形成する。また、ビームフォーマ630は、超音波プローブ610から第4の受信信号が提供されると、第4の受信信号をアナログデジタル変換して第4のデジタル信号を形成する。ビームフォーマ630は、変換素子および集束点を考慮して、第4のデジタル信号を受信集束させて第4の受信集束信号を形成する。また、ビームフォーマ630は、超音波プローブ610から第5の受信信号が提供されると、第5の受信信号をアナログデジタル変換して第5のデジタル信号を形成する。ビームフォーマ630は、変換素子および集束点を考慮して、第5のデジタル信号を受信集束させて第5の受信集束信号を形成する。
超音波データ形成部640は、ビームフォーマ630から提供される受信集束信号を用いて、超音波映像に対応する超音波データを形成する。超音波データは、RFデータを含む。しかし、超音波データは、必ずしもこれに限定されない。また、超音波データ形成部640は、超音波データを形成するのに必要な様々な信号処理(例えば、利得(gain)調節など)を受信集束信号に行うこともできる。
一例として、超音波データ形成部640は、ビームフォーマ630から第1の受信集束信号が提供されると、第1の受信集束信号を用いて、基準超音波映像UIRに対応する第1の超音波データを形成する。また、超音波データ形成部640は、ビームフォーマ630から第2の受信集束信号が提供されると、第2の受信集束信号を用いて、第1のサブ超音波映像UI1に対応する第2の超音波データを形成する。また、超音波データ形成部640は、ビームフォーマ630から第3の受信集束信号が提供されると、第3の受信集束信号を用いて、第2のサブ超音波映像UI2に対応する第3の超音波データを形成する。また、超音波データ形成部640は、ビームフォーマ630から第4の受信集束信号が提供されると、第4の受信集束信号を用いて、第3のサブ超音波映像UI3に対応する第4の超音波データを形成する。また、超音波データ形成部640は、ビームフォーマ630から第5の受信集束信号が提供されると、第5の受信集束信号を用いて、第4のサブ超音波映像UI4に対応する第5の超音波データを形成する。
再び図5を参照すると、プロセッサ530は、医療用器具510および超音波データ取得部520に連結される。プロセッサ530は、CPU(central processing unit)、マイクロプロセッサ(microprocessor)、GPU(graphic processing unit)などを含む。
図8は、本発明の第2の実施例によって、カテーテル施術のための最適な超音波映像を提供する順序を示すフローチャートである。図8を参照すると、プロセッサ530は、超音波データ取得部520から提供される超音波データを用いて、超音波映像(すなわち、基準超音波映像および複数のサブ超音波映像)を形成する(S802)。一例として、プロセッサ530は、超音波データ取得部520から提供される第1〜第5の超音波データのそれぞれを用いて、図7に示すように、基準超音波映像UIRおよび第1〜第4のサブ超音波映像UI1〜UI4を形成する。
プロセッサ530は、複数のサブ超音波映像のそれぞれに輪郭検出を行って、医療用器具510(すなわち、ニードル)の輪郭を検出する(S804)。輪郭検出は、公知の様々な方法を用いて行われることができるため、本実施例で詳細に説明しない。
プロセッサ530は、検出された輪郭に基づいて複数のサブ超音波映像を比較して(S806)、最適なサブ超音波映像を抽出する(S808)。一例として、プロセッサ530は、検出された輪郭に基づいて複数のサブ超音波映像から最適なサブ超音波映像、すなわち、最高の輝度値の医療用器具510の輪郭を有するサブ超音波映像を抽出する。
プロセッサ530は、基準超音波映像と抽出されたサブ超音波映像の表示を制御する(S810)。一例として、プロセッサ530は、ディスプレイ部550の画面領域に基準超音波映像とサブ超音波映像がデュアル方式で表示されるように制御する。
再び図5を参照すると、格納部540は、超音波データ取得部520で取得された超音波データを格納する。また、格納部540は、プロセッサ530で形成された基準超音波映像およびサブ超音波映像を格納することもできる。
ディスプレイ部550は、プロセッサ530で形成された基準超音波映像および複数のサブ超音波映像を表示する。また、ディスプレイ部550は、プロセッサ530の制御によって、基準超音波映像およびサブ超音波映像を表示する。
上述した実施例では、複数のサブ超音波映像に輪郭検出を行って最適なサブ超音波映像を抽出するものと説明したが、必ずしもこれに限定されず、複数のサブ超音波映像を順次表示しながら、ユーザによって最適なサブ超音波映像として選択されるサブ超音波映像を抽出することもできる。
以上のような医療システム500により、対象体内の病巣を基準超音波映像およびサブ超音波映像で確認しながら、医療用器具510で該病巣を除去することができる。
第3の実施例
図9は、本発明の第3の実施例における医療システムの構成を示すブロック図である。図9を参照すると、医療システム900は、医療用器具910、超音波データ取得部920、プロセッサ930、格納部940およびディスプレイ部950を備える。
図9は、本発明の第3の実施例における医療システムの構成を示すブロック図である。図9を参照すると、医療システム900は、医療用器具910、超音波データ取得部920、プロセッサ930、格納部940およびディスプレイ部950を備える。
医療用器具910は、対象体内に挿入されて対象体内の病巣を除去する。本実施例において、医療用器具910は、内部に液体が流れる管(図示せず)を含むニードル(図示せず)およびニードルの管に液体が一定の速度で流れるように液体を提供するための液体提供部(図示せず)を備える。
超音波データ取得部920は、超音波信号を対象体に送信し、対象体から反射される超音波信号(すなわち、超音波エコー信号)を受信して超音波データを取得する。
図10は、本発明の第3の実施例における超音波データ取得部の構成を示すブロック図である。図10を参照すると、超音波データ取得部920は、超音波プローブ1010、送信信号形成部1020、ビームフォーマ1030および超音波データ形成部1040を備える。
超音波プローブ1010は、電気的信号と超音波信号を相互変換する複数の変換素子(図示せず)を含む。超音波プローブ1010は、複数のスキャンライン(scanline)(図示せず)のそれぞれに沿って超音波信号を対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。受信信号は、アナログ信号である。超音波プローブ1010は、コンベックスプローブ(convex probe)、リニアプローブ(linear probe)などを含む。
送信信号形成部1020は、超音波信号の送信を制御する。また、送信信号形成部1020は、変換素子および集束点を考慮して、超音波映像を得るための送信信号を形成する。本実施例において、送信信号形成部1020は、超音波映像を得るための複数の送信信号を形成する。従って、超音波プローブ1010は、送信信号形成部1020から順次提供される送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して複数の受信信号を形成する。
ビームフォーマ1030は、超音波プローブ1010から提供される受信信号をアナログデジタル変換してデジタル信号を形成する。また、ビームフォーマ1030は、変換素子および集束点を考慮して、デジタル信号を受信集束させて受信集束信号を形成する。本実施例において、ビームフォーマ1030は、超音波プローブ1010から順次提供される受信信号をアナログデジタル変換して複数のデジタル信号を形成する。また、ビームフォーマ1030は、変換素子および集束点を考慮して、複数のデジタル信号を受信集束させて複数の受信集束信号を形成する。
超音波データ形成部1040は、ビームフォーマ1030から提供される受信集束信号を用いて、超音波データを形成する。超音波データは、RFデータを含む。しかし、超音波データは必ずしもこれに限定されない。また、超音波データ形成部1040は、超音波データを形成するのに必要な様々な信号処理(例えば、利得調節など)を受信集束信号に行うこともできる。本実施例において、超音波データ形成部1040は、ビームフォーマ1030から提供される複数の受信集束信号を用いて、複数の超音波映像のそれぞれに対応する超音波データを形成する。
再び図9を参照すると、プロセッサ930は、医療用器具910および超音波データ取得部920に連結される。プロセッサ930は、CPU(central processing unit)、マイクロプロセッサ(micro processor)、GPU(graphic processing unit)などを含む。
図11は、本発明の第3の実施例によって、カテーテル施術のための最適な超音波映像を提供する順序を示すフローチャートである。図11を参照すると、プロセッサ930は、超音波データ取得部920から提供される超音波データを用いてBモード映像を形成する(S1102)。一例として、プロセッサ930は、超音波データを用いて、複数のBモード映像を形成する。他の例として、プロセッサ930は、超音波データを用いて1つのBモード映像を形成する。
プロセッサ930は、超音波データ取得部920から提供される超音波データを用いて、ドップラ信号を形成する(S1104)。超音波データを用いたドップラ信号の形成は、公知の様々な方法が用いられることができるため、本実施例では詳細に説明しない。
プロセッサ930は、ドップラ信号を用いて、液体の流れに対応する速度成分およびパワー成分を算出する(S1106)。速度成分およびパワー成分は、公知の様々な方法を用いて算出することができるため、本実施例では詳細に説明しない。
プロセッサ930は、算出された速度成分およびパワー成分を用いて、液体流れに対応するカラードップラ映像を形成する(S1108)。カラードップラ映像は、公知の様々な方法を用いて形成され得るため、本実施例では詳細に説明しない。
プロセッサ930は、Bモード映像とカラードップラ映像とを合成して合成映像を形成する(S1110)。
上述した実施例では、Bモード映像とカラードップラ映像とを合成して合成映像を形成するものと説明したが、必ずしもこれに限定されず、カラードップラ映像に基づいてBモード映像から医療用器具910(すなわち、ニードル)の位置を検出し、検出された位置に基づいてBモード映像に映像処理を行うこともできる。
再び図9を参照すると、格納部940は、超音波データ取得部920で取得された複数の超音波データを格納する。また、格納部940は、プロセッサ930で形成されたBモード映像およびカラードップラ映像を格納することもできる。
ディスプレイ部950は、プロセッサ930で形成された合成映像を表示する。また、ディスプレイ部950は、プロセッサ930で形成されたBモード映像およびカラードップラ映像を表示する。
以上のような医療システム900により、対象体内の病巣をBモード映像、カラードップラ映像または合成映像で確認しながら、医療用器具910で該病巣を除去することができる。
第4の実施例
図12は、本発明の第4の実施例における医療システムの構成を示すブロック図である。図12を参照すると、医療システム1200は、医療用器具1210、超音波データ取得部1220、プロセッサ1230、格納部1240およびディスプレイ部1250を備える。
図12は、本発明の第4の実施例における医療システムの構成を示すブロック図である。図12を参照すると、医療システム1200は、医療用器具1210、超音波データ取得部1220、プロセッサ1230、格納部1240およびディスプレイ部1250を備える。
医療用器具1210は、対象体内に挿入されて対象体内の病巣を除去する。本実施例において、医療用器具1210は、対象体内に挿入されて対象体内の病巣を除去するためのニードル(図示せず)を含む。
超音波データ取得部1220は、超音波信号を対象体に送信し、対象体から反射される超音波信号(すなわち、超音波エコー信号)を受信して超音波データを取得する。
図13は、本発明の第4の実施例における超音波データ取得部の構成を示すブロック図である。図13を参照すると、超音波データ取得部1220は、超音波プローブ1310、送信信号形成部1320、ビームフォーマ1330および超音波データ形成部1340を備える。
超音波プローブ1310は、電気的信号と超音波信号を相互変換する複数の変換素子(図示せず)を含む。超音波プローブ1310は、複数のスキャンライン(図示せず)のそれぞれに沿って超音波信号を対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。受信信号は、アナログ信号である。超音波プローブ1310は、コンベックスプローブ(convex probe)、リニアプローブ(linear probe)などを含む。
送信信号形成部1320は、超音波信号の送信を制御する。また、送信信号形成部1320は、変換素子および集束点を考慮して、超音波映像を得るための送信信号を形成する。従って、超音波プローブ1310は、送信信号形成部1320から提供される送信信号を超音波信号に変換して対象体に送信し、対象体から反射される超音波エコー信号を受信して受信信号を形成する。
ビームフォーマ1330は、超音波プローブ1310から提供される受信信号をアナログデジタル変換してデジタル信号を形成する。また、ビームフォーマ1330は、変換素子および集束点を考慮して、デジタル信号を受信集束させて受信集束信号を形成する。
超音波データ形成部1340は、ビームフォーマ1330から提供される受信集束信号を用いて超音波データを形成する。超音波データは、位相情報を含む。また、超音波データは、RFデータを含む。しかし、超音波データは必ずしもこれに限定されない。また、超音波データ形成部1340は、超音波データを形成するのに必要な様々な信号処理(例えば、利得調節など)を受信集束信号に行うこともできる。
再び図12を参照すると、プロセッサ1230は、医療用器具1210および超音波データ取得部1220に連結される。プロセッサ1230は、CPU(central processing unit)、マイクロプロセッサ(micro processor)、GPU(graphic processing unit)などを含む。
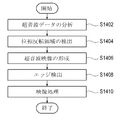
図14は、本発明の第4の実施例によって、カテーテル施術のための最適な超音波映像を提供する順序を示すフローチャートである。図14を参照すると、プロセッサ1230は、超音波データ取得部1220から提供される超音波データを分析して(S1402)、超音波データから、位相が予め定められたしきい値以上に反転する領域を検出する(S1404)。一般に、音波は、軟性媒質から硬性媒質に伝達されるとき、反射面で位相が反転する。よって、プロセッサ1230は、このような特性を用いて、位相反転領域を検出することができる。
プロセッサ1230は、超音波データ取得部1220から提供される超音波データおよび検出された位相反転領域を用いて、位相反転領域を含む超音波映像を形成する(S1406)。超音波映像は、Bモード映像を形成する。しかし、超音波映像は、必ずしもこれに限定されない。
プロセッサ1230は、超音波映像の位相反転領域にエッジ検出を行う(S1408)。エッジは、ソーベル(Sobel)マスク、プレウィット(Prewitt)マスク、ロバート(Robert)マスク、キャニー(Canny)マスクなどのような境界マスク(edge mask)を用いて検出することができる。また、エッジは、構造テンソル(Structure tensor)を用いた固有値(eigen value)の差から検出することもできる。
プロセッサ1230は、検出されたエッジに基づいて超音波映像に映像処理を行う(S1410)。一例として、プロセッサ1230は、超音波映像でエッジ領域を目立たせるための映像処理を行う。
再び図12を参照すると、格納部1240は、超音波データ取得部1220で取得された超音波データを格納する。ディスプレイ部1250は、プロセッサ1230で形成された位相反転領域を含む超音波映像を表示する。
本発明は、望ましい実施例によって説明および例示をしたが、当業者であれば添付した特許請求の範囲の事項および範疇を逸脱することなく、様々な変形および変更が可能である。
100、500、900、1200 医療システム
110、510、910、1210 医療用器具
120、520、920、1220 超音波データ取得部
130、530、930、1230 プロセッサ
140、540、940、1240 格納部
150、550、950、1250 ディスプレイ部
210、610、1010、1310 超音波プローブ
220、620、1020、1320 送信信号形成部
230、630、1030、1330 ビームフォーマ
240、640、1040、1340 超音波データ形成部
110、510、910、1210 医療用器具
120、520、920、1220 超音波データ取得部
130、530、930、1230 プロセッサ
140、540、940、1240 格納部
150、550、950、1250 ディスプレイ部
210、610、1010、1310 超音波プローブ
220、620、1020、1320 送信信号形成部
230、630、1030、1330 ビームフォーマ
240、640、1040、1340 超音波データ形成部
Claims (16)
- 対象体内に挿入されて前記対象体内の病巣を除去するためのニードル(needle)および前記ニードルに振動を印加する振動印加部を含む医療用器具と、
超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、
前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて複数の超音波映像を形成し、前記複数の超音波映像のそれぞれにモーショントラッキング(motion tracking)を行って前記ニードルの位置を検出し、前記検出されたニードルの位置に基づいて超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行うプロセッサと
を備えることを特徴とする医療システム。 - 前記超音波信号は、低周波超音波信号または高周波超音波信号を含むことを特徴とする請求項1に記載の医療システム。
- 対象体内に挿入されて前記対象体内の病巣を除去するためのニードルを含む医療用器具と、
基準ステアリング角度および該基準ステアリング角度に対する複数のステアリング角度に基づいて、超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、前記基準ステアリング角度に対応する第1の超音波データと、前記複数のステアリング角度のそれぞれに対応する第2の超音波データとを取得する超音波データ取得部と、
前記医療用器具および前記超音波データ取得部に連結され、前記第1の超音波データおよび前記第2の超音波データを用いて前記第1の超音波データに対応する基準超音波映像および前記第2の超音波データに対応する複数のサブ超音波映像を形成し、前記複数のサブ超音波映像のそれぞれに前記ニードルの輪郭検出を行って前記複数のサブ超音波映像のうちのいずれか1つのサブ超音波映像を抽出し、前記基準超音波映像および前記抽出されたサブ超音波映像の表示を制御するプロセッサと
を備えることを特徴とする医療システム。 - 前記プロセッサは、前記検出されたニードル輪郭に基づいて前記複数のサブ超音波映像を比較して、最高の輝度値の前記ニードル輪郭を有するサブ超音波映像を抽出することを特徴とする請求項3に記載の医療システム。
- 液体が流れる管を含むニードルと、前記管に前記液体が一定の速度で流れるように前記液体を提供する液体提供部とを含む医療用器具と、
超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する超音波データ取得部と、
前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いてBモード(brightness mode)映像を形成し、前記超音波データを用いて前記液体の流れに対応するカラードップラ映像を形成し、前記Bモード映像と前記カラードップラ映像とを合成して合成映像を形成するプロセッサと
を備えることを特徴とする医療システム。 - 前記プロセッサは、
前記超音波データを用いてドップラ信号を形成し、
前記ドップラ信号を用いて前記液体の流れに対応する速度成分およびパワー成分を算出し、
前記速度成分および前記パワー成分を用いて前記カラードップラ映像を形成することを特徴とする請求項5に記載の医療システム。 - 対象体内に挿入されて前記対象体内の病巣を除去するためのニードルを含む医療用器具と、
超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、位相情報を含む超音波データを取得する超音波データ取得部と、
前記医療用器具および前記超音波データ取得部に連結され、前記超音波データを用いて超音波映像を形成し、前記位相情報を用いて位相が予め定められたしきい値を超えて反転する位相反転領域を検出し、前記検出された位相反転領域に基づいて前記超音波映像にエッジ検出を行い、前記検出されたエッジに基づいて前記超音波映像に映像処理を行うプロセッサと
を備えることを特徴とする医療システム。 - 前記プロセッサは、前記超音波映像に対して前記位相反転領域に前記エッジ検出を行うことを特徴とする請求項7に記載の医療システム。
- a)対象体内の病巣を除去するためのニードルを前記対象体内に挿入しながら前記ニードルに振動を印加する段階と、
b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する段階と、
c)前記超音波データを用いて複数の超音波映像を形成する段階と、
d)前記複数の超音波映像のそれぞれにモーショントラッキングを行って前記ニードルの位置を検出する段階と、
e)前記検出されたニードルの位置に基づいて前記超音波映像の画質を改善させるための映像処理を前記複数の超音波映像に行う段階と
を備えることを特徴とする超音波映像提供方法。 - 前記超音波信号は、低周波超音波信号または高周波超音波信号を含むことを特徴とする請求項9に記載の超音波映像提供方法。
- a)ニードルを含む医療用器具を対象体内に挿入する段階と、
b)基準ステアリング角度および該基準ステアリング角度に対する複数のステアリング角度に基づいて超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、前記基準ステアリング角度に対応する第1の超音波データと、前記複数のステアリング角度のそれぞれに対応する第2の超音波データとを取得する段階と、
c)前記第1の超音波データおよび前記第2の超音波データを用いて、前記第1の超音波データに対応する基準超音波映像および前記第2の超音波データに対応する複数のサブ超音波映像を形成する段階と、
d)前記複数のサブ超音波映像のそれぞれに前記ニードルの輪郭検出を行って前記複数のサブ超音波映像のうちのいずれか1つのサブ超音波映像を抽出する段階と、
e)前記基準超音波映像および前記抽出されたサブ超音波映像の表示を制御する段階と
を備えることを特徴とする超音波映像提供方法。 - 前記段階d)は、
前記検出されたニードル輪郭に基づいて前記複数のサブ超音波映像を比較して、最高の輝度値の前記ニードル輪郭を有するサブ超音波映像を抽出する段階
を備えることを特徴とする請求項11に記載の超音波映像提供方法。 - a)液体が流れる管を含むニードルに対して一定の速度で流れる前記液体を前記管に提供する段階と、
b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して超音波データを取得する段階と、
c)前記超音波データを用いてBモード映像を形成する段階と、
d)前記超音波データを用いて前記液体の流れに対応するカラードップラ映像を形成する段階と、
e)前記Bモード映像と前記カラードップラ映像とを合成して合成映像を形成する段階と
を備えることを特徴とする超音波映像提供方法。 - 前記段階d)は、
前記超音波データを用いてドップラ信号を形成する段階と、
前記ドップラ信号を用いて前記液体の流れに対応する速度成分およびパワー成分を算出する段階と、
前記速度成分および前記パワー成分を用いて前記カラードップラ映像を形成する段階と
を備えることを特徴とする請求項13に記載の超音波映像提供方法。 - a)ニードルを含む医療用器具を対象体内に挿入する段階と、
b)超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して、位相情報を含む超音波データを取得する段階と、
c)前記超音波データを用いて超音波映像を形成する段階と、
d)前記位相情報を用いて位相が予め定められたしきい値を超えて反転する位相反転領域を検出する段階と、
e)前記検出された位相反転領域に基づいて前記超音波映像にエッジ検出を行う段階と、
f)前記検出されたエッジに基づいて前記超音波映像に映像処理を行う段階と
を備えることを特徴とする超音波映像提供方法。 - 前記段階e)は、
前記超音波映像に対して前記位相反転領域に前記エッジ検出を行う段階
を備えることを特徴とする請求項15に記載の超音波映像提供方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2010-0114331 | 2010-11-17 | ||
| KR1020100114331A KR101143663B1 (ko) | 2009-11-17 | 2010-11-17 | 중재적 시술을 위한 최적의 초음파 영상을 제공하는 의료 시스템 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012105948A true JP2012105948A (ja) | 2012-06-07 |
Family
ID=44117766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011110746A Withdrawn JP2012105948A (ja) | 2010-11-17 | 2011-05-17 | カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2454996A1 (ja) |
| JP (1) | JP2012105948A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015029499A1 (ja) * | 2013-08-30 | 2015-03-05 | 富士フイルム株式会社 | 超音波診断装置および超音波画像生成方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5095910A (en) * | 1990-04-18 | 1992-03-17 | Advanced Technology Laboratories, Inc. | Ultrasonic imaging of biopsy needle |
| JP3723663B2 (ja) * | 1997-07-15 | 2005-12-07 | フクダ電子株式会社 | 超音波診断装置 |
| AU9482698A (en) * | 1997-09-29 | 1999-04-23 | Medsim Advanced Radiology Medical Simulation Ltd. | Interventional radiology guidance system |
| JP4443672B2 (ja) * | 1998-10-14 | 2010-03-31 | 株式会社東芝 | 超音波診断装置 |
| US6524247B2 (en) * | 2001-05-15 | 2003-02-25 | U-Systems, Inc. | Method and system for ultrasound imaging of a biopsy needle |
| KR20030058423A (ko) * | 2001-12-31 | 2003-07-07 | 주식회사 메디슨 | 중재적 초음파를 사용하는 3 차원 초음파 진단 시스템에서검침 도구의 관찰 및 이의 대상체로의 진입을 용이하게하기 위한 방법 및 장치 |
| AU2003263003A1 (en) * | 2002-08-29 | 2004-03-19 | Computerized Medical Systems, Inc. | Methods and systems for localizing of a medical imaging probe and of a biopsy needle |
| CA2433205A1 (en) * | 2003-03-18 | 2004-09-18 | James Alexander Keenan | Drug delivery, bodily fluid drainage, and biopsy device with enhanced ultrasonic visibility |
| US7529393B2 (en) * | 2003-03-27 | 2009-05-05 | Koninklijke Philips Electronics, N.V. | Guidance of invasive medical devices by wide view three dimensional ultrasonic imaging |
| EP1803402A4 (en) * | 2004-10-20 | 2008-10-29 | Toshiba Kk | ULTRASONIC DIAGNOSTIC EQUIPMENT AND CONTROL METHOD THEREFOR |
| US20100312117A1 (en) * | 2007-11-28 | 2010-12-09 | Koninklijke Philips Electronics N.V. | Ultrasonic visualization of percutaneous needles, intravascular catheters and other invasive devices |
| JP5438985B2 (ja) * | 2009-02-10 | 2014-03-12 | 株式会社東芝 | 超音波診断装置及び超音波診断装置の制御プログラム |
| KR101078247B1 (ko) | 2009-04-15 | 2011-10-31 | (주)정원엔지니어링 | 고정기어와 출력기어 일체형 감속기 |
-
2011
- 2011-05-13 EP EP11165987A patent/EP2454996A1/en not_active Withdrawn
- 2011-05-17 JP JP2011110746A patent/JP2012105948A/ja not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015029499A1 (ja) * | 2013-08-30 | 2015-03-05 | 富士フイルム株式会社 | 超音波診断装置および超音波画像生成方法 |
| CN105491955A (zh) * | 2013-08-30 | 2016-04-13 | 富士胶片株式会社 | 超声波诊断装置及超声波图像生成方法 |
| CN105491955B (zh) * | 2013-08-30 | 2018-07-03 | 富士胶片株式会社 | 超声波诊断装置及超声波图像生成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2454996A1 (en) | 2012-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6322321B2 (ja) | 画像内の物体の向上された撮像のためのシステムおよび方法 | |
| US20230200784A1 (en) | Ultrasonic diagnostic device, image processing device, and image processing method | |
| JP4842933B2 (ja) | 画像診断装置 | |
| JP7461530B2 (ja) | 超音波診断装置及び穿刺支援プログラム | |
| CN103202714B (zh) | 超声波诊断装置、医用图像处理装置以及医用图像处理方法 | |
| JP2008229342A (ja) | 超音波映像を形成する超音波システム及び方法 | |
| US11701091B2 (en) | Ultrasound analysis apparatus and method for tissue elasticity and viscosity based on the hormonic signals | |
| US20150173721A1 (en) | Ultrasound diagnostic apparatus, medical image processing apparatus and image processing method | |
| JP2011120901A (ja) | 超音波空間合成映像を提供する超音波システムおよび方法 | |
| JP3833597B2 (ja) | 超音波撮像装置及び超音波撮像方法 | |
| US8663110B2 (en) | Providing an optimal ultrasound image for interventional treatment in a medical system | |
| US8348848B1 (en) | Methods and apparatus for ultrasound imaging | |
| JP4119497B2 (ja) | 超音波画像診断装置 | |
| JP2011104361A (ja) | 超音波空間合成映像を提供する超音波システムおよび方法 | |
| JP2014054362A (ja) | 超音波診断装置、画像処理装置及びプログラム | |
| JP2007195867A (ja) | 超音波診断装置及び超音波画像表示プログラム | |
| US20180214130A1 (en) | Compact fingertip-manipulated ultrasound imaging | |
| KR101143663B1 (ko) | 중재적 시술을 위한 최적의 초음파 영상을 제공하는 의료 시스템 및 방법 | |
| JP7204424B2 (ja) | 医用画像診断装置及び医用画像処理装置 | |
| JP4095332B2 (ja) | 超音波診断装置 | |
| JP2012105948A (ja) | カテーテル施術のための最適な超音波映像を提供する医療システムおよび方法 | |
| JP2007289720A (ja) | 超音波画像診断装置 | |
| JP4098266B2 (ja) | 超音波画像診断装置 | |
| KR102035991B1 (ko) | 대상체의 영상을 형성하는 방법 및 초음파 시스템 | |
| JP2013099386A (ja) | 超音波診断装置および医用画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |