JP2012012144A - 可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 - Google Patents
可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 Download PDFInfo
- Publication number
- JP2012012144A JP2012012144A JP2010148637A JP2010148637A JP2012012144A JP 2012012144 A JP2012012144 A JP 2012012144A JP 2010148637 A JP2010148637 A JP 2010148637A JP 2010148637 A JP2010148637 A JP 2010148637A JP 2012012144 A JP2012012144 A JP 2012012144A
- Authority
- JP
- Japan
- Prior art keywords
- long load
- length
- slide table
- long
- carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
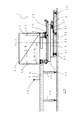
【解決手段】この受渡し装置は,任意の長さLx の長尺荷3を搬入させる上流コンベヤ2に対向する固定ベース5上に摺動自在に配設されたスライドテーブル6,スライドテーブル6の端部11に設置されて長尺荷3の後端側端部13を支持するローラ支持台7,長尺荷3の先端側端部12を支持してスライドテーブル6上を移動自在に配設されたキャリヤ8を有する。キャリヤ8は,駆動手段10の作動によって,ローラ支持台7とキャリヤ8で支持された長尺荷3の長手方向中心CLw をフォーク9が作動する所定の位置のフォーク9の幅方向中心CLf になるように設定される。
【選択図】図1
Description
2 上流コンベヤ
3 長尺荷
4 固定台
5 固定ベース
6 スライドテーブル
7 ローラ支持台
8 キャリヤ
9 フォーク
10 減速機付きモータ
11 端部
12 先端側端部
13 後端側端部
14 駆動手段
16 測長センサ
36,37 検知センサ
CLw 長尺荷の移動方向中心
CLf フォークの幅方向中心
Lx 長尺荷の任意長さ
Lmax 長尺荷の最大長さ
Lmin 長尺荷の最小長さ
Claims (8)
- 上流コンベヤによって移動方向の任意の長さの長尺荷を固定ベース上で移動自在なスライドテーブルの一端部に設置されたローラ支持台上に送り込んで前記長尺荷を前記ローラ支持台で移動自在に支持する工程,前記スライドテーブル上に移動自在に配設され且つ前記ローラ支持台に近接して待機したキャリヤで前記長尺荷の先端側端部を支持させる工程,前記長尺荷の前記スライドテーブルへの搬入に従って前記キャリヤで前記長尺荷の前記先端側端部を支持した状態で前記キャリヤを前記長尺荷の前記長さから前記長尺荷の後端側端部と前記キャリヤの前記スライドテーブル上の待機位置との間の距離を減じた長さ分だけ移動させて前記ローラ支持台で前記長尺荷の前記後端側端部を支持させた状態にして前記キャリヤを停止させる工程,前記長尺荷の最大長さの半分の長さから前記長尺荷の前記長さの半分の長さを減じた長さ分だけ前記スライドテーブルを前記固定ベース上で移動させて,前記長尺荷の移動方向の中心を予め決められた所定の位置で上下動して作動するスタッカクレーンのフォークの幅方向の中心に合わせる工程,及び前記長尺荷を前記フォークで支持して自動倉庫のラックに搬入させる工程,から構成されていることを特徴とする可動式入庫ステーションにおける長尺荷の受渡し方法。
- 前記上流コンベヤには,前記長尺荷の前記任意の長さを計測する測長センサが設けられていることを特徴とする請求項1に記載の可動式入庫ステーションにおける長尺荷の受渡し方法。
- 前記長尺荷の前記後端側端部が前記測長センサを通過した後は,前記キャリヤと前記スライドテーブルとは同時に移動させることが可能になっていることを特徴とする請求項2に記載の可動式入庫ステーションにおける長尺荷の受渡し方法。
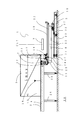
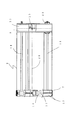
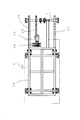
- 移動方向の任意の長さを有する長尺荷を入庫ステーションに設置された固定台上に搬入させる上流コンベヤ,前記上流コンベヤに対向した固定ベース上に摺動自在に配設されたスライドテーブル,前記上流コンベヤに対向した前記スライドテーブルの一端部に設置されて前記長尺荷の後端側端部を支持するローラ支持台,前記長尺荷の先端側端部を支持して前記スライドテーブル上を移動自在に配設されたキャリヤ,前記長尺荷を自動倉庫におけるラックに搬出入するための前記長尺荷を支持するためのスタッカクレーンに設けたフォーク,及び前記ローラ支持台と前記キャリヤとによって支持された前記長尺荷の移動方向中心を前記フォークが作動する予め決められた所定の位置の前記フォークの幅方向中心に設定するため前記スライドテーブルを前記固定ベース上で移動させる駆動手段から構成されていることを特徴とする可動式入庫ステーションにおける長尺荷の受渡し装置。
- 前記長尺荷の前記任意の長さを計測するため前記上流コンベヤに設けられた測長センサ,前記固定ベース上での前記スライドテーブルの位置を検出する検知センサ,前記キャリヤを前記スライドテーブル上で移動させるための駆動手段,及び前記スライドテーブル上での前記キャリヤの位置を検出する検知センサから構成されていることを特徴とする請求項4に記載の可動式入庫ステーションにおける長尺荷の受渡し装置。
- 前記フォークが作動する前記所定の位置は,前記スライドテーブルに搬入される前記長尺荷の最大長さの中心に設定されていることを特徴とする請求項4又は5に記載の可動式入庫ステーションにおける長尺荷の受渡し装置。
- 前記長尺荷の最小長さは,前記長尺荷の前記後端側端部を支持する前記ローラ支持台の長さ,前記長尺荷の前記先端側端部を支持する前記キャリヤの長さ,及び前記フォークの幅の長さの少なくとも総和であることを特徴とする請求項4〜6のいずれか1項に記載の可動式入庫ステーションにおける長尺荷の受渡し装置。
- 前記スライドテーブルの最大移動長さは,前記長尺荷の前記最大長さから前記キャリヤの前記スライドテーブル上の待機位置と前記ローラ支持台との間の距離を減じた長さであることを特徴とする請求項4〜7のいずれか1項に記載の可動式入庫ステーションにおける長尺荷の受渡し装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148637A JP5666840B2 (ja) | 2010-06-30 | 2010-06-30 | 可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148637A JP5666840B2 (ja) | 2010-06-30 | 2010-06-30 | 可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012012144A true JP2012012144A (ja) | 2012-01-19 |
| JP5666840B2 JP5666840B2 (ja) | 2015-02-12 |
Family
ID=45599047
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010148637A Active JP5666840B2 (ja) | 2010-06-30 | 2010-06-30 | 可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5666840B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS49127982U (ja) * | 1973-03-01 | 1974-11-01 | ||
| JPS505380U (ja) * | 1973-05-15 | 1975-01-21 | ||
| JPS5216777A (en) * | 1975-07-30 | 1977-02-08 | Hitachi Ltd | Transfer apparatus |
| JPH0891507A (ja) * | 1994-09-29 | 1996-04-09 | Daifuku Co Ltd | 自動倉庫の荷捌装置 |
| JP2003267513A (ja) * | 2002-03-14 | 2003-09-25 | Nippon Yusoki Co Ltd | 自動倉庫の位置決め装置 |
-
2010
- 2010-06-30 JP JP2010148637A patent/JP5666840B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS49127982U (ja) * | 1973-03-01 | 1974-11-01 | ||
| JPS505380U (ja) * | 1973-05-15 | 1975-01-21 | ||
| JPS5216777A (en) * | 1975-07-30 | 1977-02-08 | Hitachi Ltd | Transfer apparatus |
| JPH0891507A (ja) * | 1994-09-29 | 1996-04-09 | Daifuku Co Ltd | 自動倉庫の荷捌装置 |
| JP2003267513A (ja) * | 2002-03-14 | 2003-09-25 | Nippon Yusoki Co Ltd | 自動倉庫の位置決め装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5666840B2 (ja) | 2015-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4666213B2 (ja) | 物品収納設備 | |
| CN105151613B (zh) | 一种升降堆垛式自动立库 | |
| KR20120108962A (ko) | 물품 이송탑재 장치 및 이것을 구비한 스태커 크레인 | |
| KR101421265B1 (ko) | 이동 탑재 장치 및 이동 탑재 방법 | |
| JP5783366B2 (ja) | 仕分けシステム | |
| KR20100112855A (ko) | 자동 수직 적재 장치 | |
| CN102057118B (zh) | 用于机动车的停车设备 | |
| JP3864803B2 (ja) | 格納設備 | |
| CN106029533A (zh) | 用于转运装货单元的装置和方法 | |
| JP4203824B2 (ja) | 物品搬送装置 | |
| JP5666840B2 (ja) | 可動式入庫ステーションにおける長尺荷の受渡し方法及びその装置 | |
| CN107777624B (zh) | 一种适用于工业车辆的取料装置 | |
| JPH1135112A (ja) | 棚入れ装置、搬送物を棚に収容する棚入れ方法及び棚入れ装置において受取コンベアを受け取り高さに設定する方法 | |
| KR20110003116A (ko) | 자동 수직 적재 장치 | |
| JP5105180B2 (ja) | 物品収納設備 | |
| JP4826900B2 (ja) | 荷役作業用設備 | |
| JP3927933B2 (ja) | 搬送物のセンタリング装置 | |
| JP3002935B2 (ja) | 積付装置 | |
| JP2001019117A (ja) | 搬送装置 | |
| JPH1087079A (ja) | 移載装置 | |
| JP4203825B2 (ja) | 物品搬送装置 | |
| JPH06144578A (ja) | パレット供給装置 | |
| JPH09315519A (ja) | 物品保管設備 | |
| JP2000302207A (ja) | 棚入れ装置、搬送物を棚に収容する棚入れ方法及び棚入れ装置において受取コンベアを受け取り高さに設定する方法 | |
| JP2001301984A (ja) | 荷積みシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5666840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |