JP2012005232A - 極異方性リングマグネット及びそれを備えたブラシレスモータ - Google Patents
極異方性リングマグネット及びそれを備えたブラシレスモータ Download PDFInfo
- Publication number
- JP2012005232A JP2012005232A JP2010137547A JP2010137547A JP2012005232A JP 2012005232 A JP2012005232 A JP 2012005232A JP 2010137547 A JP2010137547 A JP 2010137547A JP 2010137547 A JP2010137547 A JP 2010137547A JP 2012005232 A JP2012005232 A JP 2012005232A
- Authority
- JP
- Japan
- Prior art keywords
- ring magnet
- polar anisotropic
- anisotropic ring
- portions
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000004907 flux Effects 0.000 claims description 18
- 230000002093 peripheral effect Effects 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 7
- 238000004519 manufacturing process Methods 0.000 abstract description 3
- 239000000463 material Substances 0.000 description 5
- 239000012212 insulator Substances 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000004804 winding Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
Images






Landscapes
- Brushless Motors (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【課題】コストを低減することができると共に、ロータの位置検出精度を確保することができる極異方性リングマグネットを提供する。
【解決手段】本発明のリングマグネット40は、極異方性を有すると共に周方向に交互にN極とS極とを繰り返すように配列された複数の磁極部52N,52Sを有して構成されている。このリングマグネット40の外周面であって周方向に隣り合う一対の磁極切替部54の間には、径方向外側に開口する凹部50が形成されており、これにより、リングマグネット40における凹部50が形成された部位の径方向の厚みD1は、凹部50が形成されていない他の部位(隣り合う一対の凹部50の間の部位)の径方向の厚みD2よりも薄くなっている。
【選択図】図4
【解決手段】本発明のリングマグネット40は、極異方性を有すると共に周方向に交互にN極とS極とを繰り返すように配列された複数の磁極部52N,52Sを有して構成されている。このリングマグネット40の外周面であって周方向に隣り合う一対の磁極切替部54の間には、径方向外側に開口する凹部50が形成されており、これにより、リングマグネット40における凹部50が形成された部位の径方向の厚みD1は、凹部50が形成されていない他の部位(隣り合う一対の凹部50の間の部位)の径方向の厚みD2よりも薄くなっている。
【選択図】図4
Description
本発明は、ブラシレスモータに用いられる極異方性リングマグネット及びそれを備えたブラシレスモータに関する。
特許文献1には、永久磁石モータに用いられるラジアル配向されたリング磁石が開示されている。このリング磁石の外周面には、N極とS極との間に位置されるように複数の切り欠き部が形成されている。
しかしながら、上記特許文献1に記載の例では、ラジアル配向されたリング磁石が用いられており、極異方性を有するリングマグネットについては何ら考慮されていない。
また、極異方性リングマグネットがロータに備えられたブラシレスモータにおいて、極異方性リングマグネットの回転に伴う磁束の変化に基づきロータの回転位置を検出する場合には、ロータの位置検出精度が確保されることが望まれる。
本発明は、上記事情に鑑みてなされたものであって、その目的は、コストを低減することができると共に、ロータの位置検出精度を確保することができる極異方性リングマグネットを提供することにある。
また、本発明の他の目的は、コストを低減することができると共に、ロータの回転位置精度を確保することができるブラシレスモータを提供することにある。
前記課題を解決するために、請求項1に記載の極異方性リングマグネットは、極異方性を有すると共に周方向に交互にN極とS極とを繰り返すように配列された複数の磁極部を有して構成されると共に、その外周面であって周方向に隣り合う一対の磁極切替部の間に径方向外側に開口する凹部が形成され、且つ、前記凹部が形成された部位の径方向の厚みが前記凹部が形成されていない他の部位の径方向の厚みよりも薄く形成されている。
この極異方性リングマグネットによれば、その外周面には、径方向外側に開口する凹部が形成されており、これにより、凹部が形成された部位の径方向の厚みは、凹部が形成されていない他の部位の径方向の厚みよりも薄くなっている。従って、この凹部が形成された分、マグネット材料を削減することができるので、コストを低減することができる。
しかも、この凹部は、周方向に隣り合う一対の磁極切替部の間に形成されているので、この凹部が極異方性リングマグネットの回転に伴う磁束の変化に影響を及ぼすことを抑制することができる。これにより、極異方性リングマグネットの回転に伴う磁束の変化に基づきロータの回転位置を検出する場合でも、ロータの位置検出精度を確保することができる。
請求項2に記載の極異方性リングマグネットは、請求項1に記載の極異方性リングマグネットにおいて、前記凹部が前記周方向に隣り合う一対の磁極切替部の間にそれぞれ形成された構成とされている。
この極異方性リングマグネットによれば、凹部は、周方向に隣り合う一対の磁極切替部の間にそれぞれ形成されているので(複数の磁極部と同数形成されているので)、マグネット材料をより削減することができる。
請求項3に記載の極異方性リングマグネットは、請求項1に記載の極異方性リングマグネットにおいて、前記凹部が前記複数の磁極部のうちN極又はS極のどちらか一方の各磁極部の外周面にそれぞれ形成された構成とされている。
この極異方性リングマグネットによれば、凹部は、複数の磁極部のうちN極又はS極のどちらか一方の各磁極部の外周面にそれぞれ形成されているので、極異方性リングマグネットの製造を容易にしつつ、マグネット材料を削減することができる。
請求項4に記載の極異方性リングマグネットは、請求項1〜請求項3のいずれか一項に記載の極異方性リングマグネットにおいて、前記凹部が前記極異方性リングマグネットの周方向に隣り合う一対の外壁部を有して構成され、前記一対の外壁部が互いの側且つ前記極異方性リングマグネットの径方向外側に凸を成すように湾曲して形成された構成とされている。
この極異方性リングマグネットによれば、凹部を構成する一対の外壁部は、互いの側且つ極異方性リングマグネットの径方向外側に凸を成すように湾曲して形成されている。従って、この一対の外壁部が、極異方性リングマグネットの周方向に沿って正弦波状に形成される磁束に沿って配置されるので、磁束に影響を及ぼすことを抑制することができる。
また、前記課題を解決するために、請求項5に記載のブラシレスモータは、請求項1〜請求項4のいずれか一項に記載の極異方性リングマグネットを有するロータと、前記極異方性リングマグネットの径方向内側に配置され、電流の供給を受けて前記極異方性リングマグネットに対して回転磁界を形成し、前記ロータを回転させるステータと、前記極異方性リングマグネットの回転に伴う磁束の変化を検出する磁束検出器を有し、前記磁束検出器の検出結果に基づいて前記ステータに供給される電流を制御する制御基板と、を備えている。
このブラシレスモータによれば、ロータに、請求項1〜請求項3のいずれか一項に記載の極異方性リングマグネットが用いられているので、極異方性リングマグネットの低コスト化によりコストを低減することができる。
しかも、この極異方性リングマグネットの回転に伴う磁束の変化に基づきロータの回転位置が制御されるので、ロータの回転位置精度も確保することができる。
請求項6に記載のブラシレスモータは、請求項5に記載のブラシレスモータにおいて、前記ロータが前記極異方性リングマグネットを収容するマグネット収容部材を有し、前記マグネット収容部材の内周面には、前記凹部と嵌合されて前記極異方性リングマグネットを固定する凸部が形成された構成とされている。
このブラシレスモータによれば、上述の凹部と凸部が嵌合されることにより、極異方性リングマグネットをマグネット収容部材に強固に固定することができる。
しかも、リングマグネットとマグネット収容部材とを固定するために接着剤を用いる必要が無いので、コストをより低減することができると共に、リングマグネットとマグネット収容部材との組付時の作業性も向上させることができる。
請求項7に記載のブラシレスモータは、請求項6に記載のブラシレスモータにおいて、前記マグネット収容部材が底部及び筒状部を有する有底筒状に形成され、前記凸部が前記底部に連結されると共に前記筒状部の内周面に軸方向に沿って長手状に形成された構成とされている。
このブラシレスモータによれば、凸部は、マグネット収容部材の底部に連結されると共に筒状部の内周面に軸方向に沿って長手状に形成されている。従って、この凸部が補強リブの役割を果たすので、マグネット収容部材の剛性を向上させることができ、これにより、マグネット収容部材の変形を抑制することができる。
以下、図面に基づき、本発明の一実施形態について説明する。
図1に示されるように、本発明の一実施形態に係るブラシレスモータ10は、モータシャフト12と、センターピース14と、ステータ16と、ロータ18と、制御基板20とを主要な構成として備えている。
センターピース14は、扁平容器状の本体部22と、本体部22の中央部に立設された筒状の支持部24とを有して構成されている。支持部24の先端側には、軸受26が収容されており、モータシャフト12は、この軸受26によって回転可能に支持されている。
ステータ16は、後述するリングマグネット40の径方向内側に配置されており、ステータコア28と、複数の巻線30と、インシュレータ32とを有して構成されている。ステータコア28は、モータシャフト12の周囲に環状に形成されており、その内側に支持部24の先端側が嵌合されることにより、支持部24に支持されている。このステータコア28には、軸方向両側からインシュレータ32が装着されており、このステータコア28に形成された各ティース部28Aには、インシュレータ32を介して各巻線30が巻装されている。
ロータ18は、マグネット収容部材38と、リングマグネット40(極異方性リングマグネット)とを有して構成されている。マグネット収容部材38は、ステータコア28と同軸状に設けられており、底部42及び筒状部44を有する有底筒状に形成されている。底部42の中央部には、軸方向に貫通する孔部46が形成されており、この孔部46にモータシャフト12の先端側が圧入されることにより、マグネット収容部材38は、モータシャフト12に一体回転可能に固定されている。
筒状部44の内周面には、図2に示されるように、底部42に連結されると共に筒状部44の軸方向に沿って長手状に延びる凸部48が複数形成されている。この複数の凸部48は、筒状部44の周方向に間隔を空けて形成されている。
一方、リングマグネット40の外周面には、径方向外側に開口する凹部50が周方向に間隔を空けて複数形成されている。この複数の凹部50は、上述の複数の凸部48と同数形成されている。そして、リングマグネット40は、図3に示されるように、マグネット収容部材38の内側に収容されると共に、凸部48が凹部50と嵌合されることにより、マグネット収容部材38に固定されている。
また、このリングマグネット40は、より具体的には、図4に示されるように、周方向に交互にN極とS極とを繰り返すように配列された複数の磁極部52N,52Sを有して構成されている。この複数の磁極部52N,52Sは、極異方性を有するように着磁されている。なお、磁極部52Nは、N極であり、磁極部52Sは、S極である。
また、上述の複数の凹部50は、それぞれ周方向に隣り合う一対の磁極切替部54の間であって、各磁極部52N,52Sの外周面における周方向中央部に形成されている。そして、このリングマグネット40では、凹部50が形成された部位の径方向の厚みD1は、凹部50が形成されていない他の部位(つまり、周方向に隣り合う一対の凹部50の間の部位)の径方向の厚みD2よりも薄くなっている。
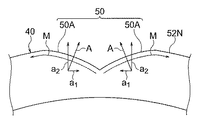
さらに、凹部50は、図5に示されるように、リングマグネット40の周方向に隣り合う一対の外壁部50Aを有して構成されている。この一対の外壁部50Aは、互いの側且つリングマグネット40の径方向外側(つまり、矢印a1側且つ矢印a2側である矢印A側)に凸を成すように湾曲して形成されている。
図1に示される制御基板20は、センターピース14に固定されており、その表面や裏面には、制御ICや、複数の電気素子等が実装されている。また、この制御基板20の表面には、上述のリングマグネット40と軸方向に対向する位置に、例えば、ホールIC等により構成された磁束検出器56が実装されている。
そして、このブラシレスモータ10では、ロータ18が回転されてリングマグネット40の回転に伴う磁束の変化が磁束検出器56によって検出されると、この磁束検出器56の検出結果に基づいて制御基板20の制御ICによりステータ16に供給される電流が制御される。また、電流の供給を受けることでステータ16からリングマグネット40に対して回転磁界が形成され、これにより、ロータ18が回転されるようになっている。
次に、本発明の一実施形態の作用及び効果について説明する。
本発明の一実施形態によれば、図4に示されるように、リングマグネット40の外周面には、径方向外側に開口する凹部50が形成されており、これにより、リングマグネット40における凹部50が形成された部位の径方向の厚みD1は、凹部50が形成されていない他の部位の径方向の厚みD2よりも薄くなっている。従って、この凹部50が形成された分、マグネット材料を削減することができるので、リングマグネット40のコスト、ひいては、ブラシレスモータ10のコストを低減することができる。
特に、凹部50は、周方向に隣り合う一対の磁極切替部54の間にそれぞれ形成されているので(複数の磁極部52N,52Sと同数形成されているので)、マグネット材料をより削減することができ、コストをより低減することができる。
また、凹部50は、周方向に隣り合う一対の磁極切替部54の間に形成されているので、この凹部50がリングマグネット40の回転に伴う磁束の変化に影響を及ぼすことを抑制することができる。これにより、リングマグネット40の回転に伴う磁束の変化に基づきロータ18の回転位置を検出する場合でも、ロータ18の位置検出精度を確保することができ、ひいては、ロータ18の回転位置精度を確保することができる。
また、この凹部50を構成する一対の外壁部50Aは、図5に示されるように、互いの側且つリングマグネット40の径方向外側(つまり、矢印a1側且つ矢印a2側である矢印A側)に凸を成すように湾曲して形成されている。従って、この一対の外壁部50Aが、リングマグネット40の周方向に沿って正弦波状に形成される磁束Mに沿って配置されるので、磁束Mに影響を及ぼすことを抑制することができる。
また、図3に示されるように、上述の凹部50と凸部48が嵌合されることにより、リングマグネット40をマグネット収容部材38に強固に固定することができる。
しかも、リングマグネット40とマグネット収容部材38とを固定するために接着剤を用いる必要が無いので、コストをより低減することができると共に、リングマグネット40とマグネット収容部材38との組付時の作業性も向上させることができる。
また、凸部48は、図2に示されるように、マグネット収容部材38の底部42に連結されると共に筒状部44の内周面に軸方向に沿って長手状に形成されている。従って、この凸部48が補強リブの役割を果たすので、マグネット収容部材38の剛性を向上させることができ、これにより、マグネット収容部材38の変形を抑制することができる。
次に、本発明の一実施形態の変形例について説明する。
上記実施形態において、複数の凹部50は、周方向に隣り合う一対の磁極切替部54の間にそれぞれ形成されていたが(複数の磁極部52N,52Sと同数形成されていたが)、図6に示されるように、N極からなる磁極部52Nの外周面にのみ形成されていても良い。また、特に図示しないが、複数の凹部50は、S極からなる磁極部52Sの外周面にのみ形成されていても良い。
このように構成されていると、リングマグネット40の製造を容易にしつつ、マグネット材料を削減することができる。
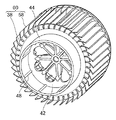
また、図7,図8に示されるように、マグネット収容部材38の外周面には、複数の羽根58が形成され、このマグネット収容部材38と複数の羽根58とでファン部材60が構成されていても良い。つまり、上述のブラシレスモータ10(図1参照)は、ファンモータとして構成されていても良い。
以上、本発明の一実施形態について説明したが、本発明は、上記に限定されるものでなく、上記以外にも、その主旨を逸脱しない範囲内において種々変形して実施可能であることは勿論である。
10・・・ブラシレスモータ、12・・・モータシャフト、14・・・センターピース、16・・・ステータ、18・・・ロータ、20・・・制御基板、22・・・本体部、24・・・支持部、26・・・軸受、28・・・ステータコア、28A・・・ティース部、30・・・巻線、32・・・インシュレータ、38・・・マグネット収容部材、40・・・リングマグネット(極異方性リングマグネット)、42・・・底部、44・・・筒状部、46・・・孔部、48・・・凸部、50・・・凹部、50A・・・外壁部、52N,52S・・・磁極部、54・・・磁極切替部、56・・・磁束検出器、58・・・羽根、60・・・ファン部材
Claims (7)
- 極異方性を有すると共に周方向に交互にN極とS極とを繰り返すように配列された複数の磁極部を有して構成されると共に、その外周面であって周方向に隣り合う一対の磁極切替部の間に径方向外側に開口する凹部が形成され、且つ、前記凹部が形成された部位の径方向の厚みが前記凹部が形成されていない他の部位の径方向の厚みよりも薄く形成された極異方性リングマグネット。
- 前記凹部は、前記周方向に隣り合う一対の磁極切替部の間にそれぞれ形成されている、
請求項1に記載の極異方性リングマグネット。 - 前記凹部は、前記複数の磁極部のうちN極又はS極のどちらか一方の各磁極部の外周面にそれぞれ形成されている、
請求項1に記載の極異方性リングマグネット。 - 前記凹部は、前記極異方性リングマグネットの周方向に隣り合う一対の外壁部を有して構成され、
前記一対の外壁部は、互いの側且つ前記極異方性リングマグネットの径方向外側に凸を成すように湾曲して形成されている、
請求項1〜請求項3のいずれか一項に記載の極異方性リングマグネット。 - 請求項1〜請求項4のいずれか一項に記載の極異方性リングマグネットを有するロータと、
前記極異方性リングマグネットの径方向内側に配置され、電流の供給を受けて前記極異方性リングマグネットに対して回転磁界を形成し、前記ロータを回転させるステータと、
前記極異方性リングマグネットの回転に伴う磁束の変化を検出する磁束検出器を有し、前記磁束検出器の検出結果に基づいて前記ステータに供給される電流を制御する制御基板と、
を備えたブラシレスモータ。 - 前記ロータは、前記極異方性リングマグネットを収容するマグネット収容部材を有し、
前記マグネット収容部材の内周面には、前記凹部と嵌合されて前記極異方性リングマグネットを固定する凸部が形成されている、
請求項5に記載のブラシレスモータ。 - 前記マグネット収容部材は、底部及び筒状部を有する有底筒状に形成され、
前記凸部は、前記底部に連結されると共に、前記筒状部の内周面に軸方向に沿って長手状に形成されている、
請求項6に記載のブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010137547A JP2012005232A (ja) | 2010-06-16 | 2010-06-16 | 極異方性リングマグネット及びそれを備えたブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010137547A JP2012005232A (ja) | 2010-06-16 | 2010-06-16 | 極異方性リングマグネット及びそれを備えたブラシレスモータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012005232A true JP2012005232A (ja) | 2012-01-05 |
Family
ID=45536577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010137547A Pending JP2012005232A (ja) | 2010-06-16 | 2010-06-16 | 極異方性リングマグネット及びそれを備えたブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012005232A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013162697A (ja) * | 2012-02-07 | 2013-08-19 | Asmo Co Ltd | モータ、及びロータマグネットの着磁方法 |
| CN104207279A (zh) * | 2014-09-03 | 2014-12-17 | 统一企业(中国)投资有限公司昆山研究开发中心 | 悬浮仙草冻植物饮料的制备方法 |
| CN108988529A (zh) * | 2018-07-20 | 2018-12-11 | 中山市特斯拉克磁电科技有限公司 | 一种钕铁硼外转子及其制作方法 |
| JP2020018130A (ja) * | 2018-07-26 | 2020-01-30 | 株式会社デンソー | 回転電機 |
| WO2020090447A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| WO2020090365A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| WO2020090449A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機及びその製造方法 |
| JP2020141527A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社デンソー | 回転電機 |
| WO2020189725A1 (ja) * | 2019-03-20 | 2020-09-24 | 株式会社デンソー | 回転電機 |
| US20200395878A1 (en) | 2017-12-28 | 2020-12-17 | Denso Corporation | Rotating electrical machine |
| CN116130201A (zh) * | 2023-03-08 | 2023-05-16 | 成都银河磁体股份有限公司 | 一种环状磁体结构、环状磁体组件及电机 |
| US11664693B2 (en) | 2017-12-28 | 2023-05-30 | Denso Corporation | Rotating electrical machine |
| US11664708B2 (en) | 2017-07-21 | 2023-05-30 | Denso Corporation | Rotating electrical machine |
| US11843334B2 (en) | 2017-07-13 | 2023-12-12 | Denso Corporation | Rotating electrical machine |
| US11962194B2 (en) | 2017-12-28 | 2024-04-16 | Denso Corporation | Rotating electric machine |
| US11979063B2 (en) | 2017-12-28 | 2024-05-07 | Denso Corporation | Rotating electric machine |
| US11984778B2 (en) | 2020-03-05 | 2024-05-14 | Denso Corporation | Rotating electric machine |
| US12074477B2 (en) | 2017-12-28 | 2024-08-27 | Denso Corporation | Rotating electrical machine system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09330841A (ja) * | 1996-06-12 | 1997-12-22 | Tdk Corp | 表面多極異方性リング磁石の製造方法 |
| JPH103740A (ja) * | 1996-06-17 | 1998-01-06 | Sanyo Electric Co Ltd | 光ディスク駆動装置 |
| JPH10201152A (ja) * | 1997-01-17 | 1998-07-31 | Mitsubishi Electric Corp | 永久磁石回転子およびその製造方法 |
| JP2002095196A (ja) * | 2000-09-11 | 2002-03-29 | Fujitsu Ten Ltd | モータ |
-
2010
- 2010-06-16 JP JP2010137547A patent/JP2012005232A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09330841A (ja) * | 1996-06-12 | 1997-12-22 | Tdk Corp | 表面多極異方性リング磁石の製造方法 |
| JPH103740A (ja) * | 1996-06-17 | 1998-01-06 | Sanyo Electric Co Ltd | 光ディスク駆動装置 |
| JPH10201152A (ja) * | 1997-01-17 | 1998-07-31 | Mitsubishi Electric Corp | 永久磁石回転子およびその製造方法 |
| JP2002095196A (ja) * | 2000-09-11 | 2002-03-29 | Fujitsu Ten Ltd | モータ |
Cited By (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013162697A (ja) * | 2012-02-07 | 2013-08-19 | Asmo Co Ltd | モータ、及びロータマグネットの着磁方法 |
| CN104207279A (zh) * | 2014-09-03 | 2014-12-17 | 统一企业(中国)投资有限公司昆山研究开发中心 | 悬浮仙草冻植物饮料的制备方法 |
| US11843334B2 (en) | 2017-07-13 | 2023-12-12 | Denso Corporation | Rotating electrical machine |
| US11664708B2 (en) | 2017-07-21 | 2023-05-30 | Denso Corporation | Rotating electrical machine |
| US11664707B2 (en) | 2017-07-21 | 2023-05-30 | Denso Corporation | Rotating electrical machine |
| US11824428B2 (en) | 2017-07-21 | 2023-11-21 | Denso Corporation | Rotating electrical machine |
| US11831228B2 (en) | 2017-07-21 | 2023-11-28 | Denso Corporation | Rotating electrical machine |
| US11984795B2 (en) | 2017-07-21 | 2024-05-14 | Denso Corporation | Rotating electrical machine |
| US11962228B2 (en) | 2017-07-21 | 2024-04-16 | Denso Corporation | Rotating electrical machine |
| US11979063B2 (en) | 2017-12-28 | 2024-05-07 | Denso Corporation | Rotating electric machine |
| US11962194B2 (en) | 2017-12-28 | 2024-04-16 | Denso Corporation | Rotating electric machine |
| US12028004B2 (en) | 2017-12-28 | 2024-07-02 | Denso Corporation | Rotating electrical machine |
| US12074477B2 (en) | 2017-12-28 | 2024-08-27 | Denso Corporation | Rotating electrical machine system |
| US20200395878A1 (en) | 2017-12-28 | 2020-12-17 | Denso Corporation | Rotating electrical machine |
| US11664693B2 (en) | 2017-12-28 | 2023-05-30 | Denso Corporation | Rotating electrical machine |
| CN108988529A (zh) * | 2018-07-20 | 2018-12-11 | 中山市特斯拉克磁电科技有限公司 | 一种钕铁硼外转子及其制作方法 |
| JP7147327B2 (ja) | 2018-07-26 | 2022-10-05 | 株式会社デンソー | 回転電機 |
| WO2020022017A1 (ja) * | 2018-07-26 | 2020-01-30 | 株式会社デンソー | 回転電機 |
| JP2020018130A (ja) * | 2018-07-26 | 2020-01-30 | 株式会社デンソー | 回転電機 |
| JP2020072536A (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| JP2020072539A (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| JP7263737B2 (ja) | 2018-10-30 | 2023-04-25 | 株式会社デンソー | 回転電機 |
| JP7268326B2 (ja) | 2018-10-30 | 2023-05-08 | 株式会社デンソー | 回転電機及びその製造方法 |
| US12132356B2 (en) | 2018-10-30 | 2024-10-29 | Denso Corporation | Rotating electrical machine |
| CN113169603B (zh) * | 2018-10-30 | 2024-09-13 | 株式会社电装 | 旋转电机及其制造方法 |
| US20210249916A1 (en) * | 2018-10-30 | 2021-08-12 | Denso Corporation | Rotating electric machine and manufacturing method thereof |
| CN113169603A (zh) * | 2018-10-30 | 2021-07-23 | 株式会社电装 | 旋转电机及其制造方法 |
| US12081077B2 (en) * | 2018-10-30 | 2024-09-03 | Denso Corporation | Rotating electric machine and manufacturing method thereof |
| WO2020090447A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| WO2020090365A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機 |
| JP7196536B2 (ja) | 2018-10-30 | 2022-12-27 | 株式会社デンソー | 回転電機 |
| WO2020090449A1 (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機及びその製造方法 |
| JP2020072538A (ja) * | 2018-10-30 | 2020-05-07 | 株式会社デンソー | 回転電機及びその製造方法 |
| JP2020141527A (ja) * | 2019-02-28 | 2020-09-03 | 株式会社デンソー | 回転電機 |
| WO2020175497A1 (ja) * | 2019-02-28 | 2020-09-03 | 株式会社デンソー | 回転電機 |
| JP7331383B2 (ja) | 2019-02-28 | 2023-08-23 | 株式会社デンソー | 回転電機 |
| US12088147B2 (en) | 2019-02-28 | 2024-09-10 | Denso Corporation | Rotating electric machine |
| CN113544950A (zh) * | 2019-02-28 | 2021-10-22 | 株式会社电装 | 旋转电机 |
| WO2020189725A1 (ja) * | 2019-03-20 | 2020-09-24 | 株式会社デンソー | 回転電機 |
| JP2020156242A (ja) * | 2019-03-20 | 2020-09-24 | 株式会社デンソー | 回転電機 |
| US11984778B2 (en) | 2020-03-05 | 2024-05-14 | Denso Corporation | Rotating electric machine |
| CN116130201A (zh) * | 2023-03-08 | 2023-05-16 | 成都银河磁体股份有限公司 | 一种环状磁体结构、环状磁体组件及电机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012005232A (ja) | 極異方性リングマグネット及びそれを備えたブラシレスモータ | |
| JP6511137B2 (ja) | ブラシレスモータ | |
| JP7293680B2 (ja) | モータおよび送風装置 | |
| JP2017188981A (ja) | ステータ、その製造方法、およびブラシレスモータ | |
| JP2014150710A (ja) | 回転電機 | |
| JP2010035375A (ja) | モータ | |
| JP2005168264A (ja) | ブラシレスモータ | |
| JP2008113480A (ja) | モータ | |
| JP2007050370A5 (ja) | ||
| CN106208585B (zh) | 无刷马达 | |
| JP2008245414A (ja) | ブラシレスモータ | |
| JP6151171B2 (ja) | ステータ構造およびブラシレスモータ | |
| JP5290608B2 (ja) | アキシャルギャップモータ | |
| JP2013150432A (ja) | ブラシレスモータ及びファンモータ | |
| JP2014155381A (ja) | ロータ、及びブラシレスモータ | |
| JP2013005564A (ja) | ブラシレスモータ | |
| JP2019088073A (ja) | ブラシレスモータ | |
| JP4770434B2 (ja) | モータ | |
| JP2016111889A (ja) | ステッピングモータ | |
| JP6318995B2 (ja) | アクチュエータ | |
| JP4706854B2 (ja) | アキシャルエアギャップ型電動機 | |
| JP2003079126A (ja) | モータ | |
| JP7389609B2 (ja) | モータ装置 | |
| JP2007221877A (ja) | 磁石回転子 | |
| JP2010075026A (ja) | モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140603 |