JP2011237338A - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP2011237338A JP2011237338A JP2010110345A JP2010110345A JP2011237338A JP 2011237338 A JP2011237338 A JP 2011237338A JP 2010110345 A JP2010110345 A JP 2010110345A JP 2010110345 A JP2010110345 A JP 2010110345A JP 2011237338 A JP2011237338 A JP 2011237338A
- Authority
- JP
- Japan
- Prior art keywords
- target
- frequency
- radar apparatus
- transmission
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【課題】装置構成の複雑化や大規模化を招くことなく、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減するレーダ装置を得る。
【解決手段】レーダ装置は、相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
【選択図】図1
【解決手段】レーダ装置は、相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
【選択図】図1
Description
この発明は、送信パルスの変調に非線形周波数変調を用いたパルス圧縮を行う機能を備えたレーダ装置に関するものである。
パルスレーダにおいて、探知距離の増大と距離分解能の向上を両立させる技術としてパルス圧縮が知られている。パルス圧縮を行う機能を備えた一般的なレーダ装置は、送信波形発生器、送信機、送受切換器、空中線、受信機、参照信号発生器、相関処理器、信号検出器、測距器などから構成されている。
パルス圧縮では、送信パルスとしてパルス内に特殊な変調を施したパルス幅の広い送信信号を用い、受信後の処理においてその復調(相関処理)を実施して狭いパルス幅に変換する。
送信波形発生器で生成した変調を施した送信パルスは、送信機及び参照信号発生器へ入力される。送信機では、送信パルスの周波数変換及び増幅を行い、送受切換器を経て、空中線より空間に送信される。物体からの反射信号は、空中線及び送受切換器を経て、受信機に入力され増幅及び周波数変換された後、相関処理器へ出力される。
パルス圧縮では、送信パルスとしてパルス内に特殊な変調を施したパルス幅の広い送信信号を用い、受信後の処理においてその復調(相関処理)を実施して狭いパルス幅に変換する。
送信波形発生器で生成した変調を施した送信パルスは、送信機及び参照信号発生器へ入力される。送信機では、送信パルスの周波数変換及び増幅を行い、送受切換器を経て、空中線より空間に送信される。物体からの反射信号は、空中線及び送受切換器を経て、受信機に入力され増幅及び周波数変換された後、相関処理器へ出力される。
一方、送信波形発生器から入力された送信パルスは、参照信号発生器においてウェイティング(重み付け)処理等を施された後、相関処理器へ入力される。相関処理器では、受信信号と参照信号とを用いて時間領域若しくは周波数領域で相関処理を行い、圧縮結果(以降では相互相関特性と呼ぶ)を信号検出器へ出力する。信号検出器では、所定の閾値等により、所望信号の位置を検出し、測距器へ出力する。測距器では、検出された信号の位置を距離に変換することで、レーダと目標との距離を算出する。
通常、相関処理では、目標位置の周囲にレンジサイドローブ(またはタイムサイドローブ、単にサイドローブ)と呼ばれる、目標の振幅値に対して比較的大きな振幅値を持つ応答が生じるため、例えば、大きな反射断面積を持つ目標以外の物体(クラッタ)の近傍に小さな反射断面積を持つ目標がある場合には、目標からの反射信号がクラッタのサイドローブに埋もれて目標の検出が困難となる問題や、クラッタのサイドローブを目標と誤検知する問題等が生じる。
そこで、サイドローブを抑圧する手段としては、相関処理を行う際にウェイティングを施すことや、振幅テーパを施した線形周波数変調波形を送信パルスに用いる方法等が知られているが、ウェイティングや振幅テーパは一般に信号の損失を伴うため、微弱な信号を検出することが困難となる。このような損失がなく、サイドローブを抑圧する効果があるものとして、非線形周波数変調を施した送信パルスを用いる方法が知られている(例えば、特許文献1参照)。
しかし、非線形周波数変調を用いたパルス圧縮では、低速目標に対しては、レンジサイドローブの抑圧効果が高いが、高速目標に対しては目標の移動によるドップラ偏移を受け、圧縮波形の振幅の低下や、レンジサイドローブが線形周波数変調等に比べて増大するなどの欠点が生じる。
また、特許文献1には、目標のドップラ偏移量に応じて相関処理を行う参照信号の周波数を調整するチャンネルを複数設けることでドップラ偏移による圧縮性能劣化を低減する技術が記載されている。
また、特許文献1には、目標のドップラ偏移量に応じて相関処理を行う参照信号の周波数を調整するチャンネルを複数設けることでドップラ偏移による圧縮性能劣化を低減する技術が記載されている。
しかし、従来の非線形周波数変調を用いたパルス圧縮を行うレーダ装置は、目標のドップラ偏移量に応じたチャンネルを複数持つ必要があるため装置構成が複雑になる問題があった。
この発明は、前記のような課題を解決するためになされたものであり、装置構成の複雑化や大規模化を招くことなく、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減するレーダ装置を得ることを目的とする。
この発明に係るレーダ装置は、送信波形発生器により非線形周波数変調が施こされた送信波形の送信波を空間に放射するとともに目標からの反射波を受信し、且つ上記送信波形に対応している参照信号発生器により発生された参照信号と受信した反射波から得られた受信信号との相互相関処理を行うとともに相互相関処理の結果から距離を測定するレーダ装置において、上記相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
この発明に係るレーダ装置は、非線形周波数変調を用いたパルス圧縮を行うレーダ装置において、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減し、精度劣化のない測距が可能となる。
以下、本発明のレーダ装置の好適な実施の形態につき図面を用いて説明する。
実施の形態1.
図1は、この発明の実施の形態1に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態1に係るレーダ装置は、図1に示すように、非線形周波数変調を施した送信波形を発生する送信波形発生器1、送信波形の周波数変換や増幅等を行う送信機2、送信と受信とを切り換える送受信切換器3、送信波を空間に放射し、物体からの反射波を受信する空中線4、受信波の増幅や周波数変換等を行う受信機5、送信波形に対応する参照信号を発生する参照信号発生器6、受信信号と参照信号の相関処理を行う相関処理器7、及び、相互相関特性(相互相関後の信号の振幅値)のピーク位置を検出するピーク検出器10を備えている。
実施の形態1.
図1は、この発明の実施の形態1に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態1に係るレーダ装置は、図1に示すように、非線形周波数変調を施した送信波形を発生する送信波形発生器1、送信波形の周波数変換や増幅等を行う送信機2、送信と受信とを切り換える送受信切換器3、送信波を空間に放射し、物体からの反射波を受信する空中線4、受信波の増幅や周波数変換等を行う受信機5、送信波形に対応する参照信号を発生する参照信号発生器6、受信信号と参照信号の相関処理を行う相関処理器7、及び、相互相関特性(相互相関後の信号の振幅値)のピーク位置を検出するピーク検出器10を備えている。
また、この発明の実施の形態1に係るレーダ装置は、ピーク位置の両側の近傍の第1サイドローブの位置を検出する第1サイドローブ検出器11、二つの第1サイドローブの振幅値を比較し、振幅値の低い方のサイドローブが存在する側のデータを出力する第1サイドローブ比較器12、1つのピーク位置に対して両側のデータを合成するデータ合成器13、データ合成後の振幅データから所定閾値以上の値を持つデータを検出する信号検出器8、及び検出された位置を距離に変換する測距器9を備えている。
次に、この発明の実施の形態1に係るレーダ装置の動作について説明する。
この発明の実施の形態1に係るレーダ装置では、目標がほぼ同位置と見なせる距離(例えば、距離分解能)に相当する時間間隔を空けて2つのパルスを送信する。送信波形発生器1では、周波数が時間とともに増加するアップチャープと、周波数が時間とともに減少するダウンチャープの周波数変調を施した送信パルスを発生する。その後、相関処理器7において目標によって反射された受信信号と参照信号を用いて時間領域または周波数領域で相関処理を行い、圧縮結果(以下、相互相関特性と呼ぶ)ピーク検出器10へ出力する。ここで、参照信号発生器6においては、例えば、信号の損失が発生しない矩形のウェイティングを用いる。
この発明の実施の形態1に係るレーダ装置では、目標がほぼ同位置と見なせる距離(例えば、距離分解能)に相当する時間間隔を空けて2つのパルスを送信する。送信波形発生器1では、周波数が時間とともに増加するアップチャープと、周波数が時間とともに減少するダウンチャープの周波数変調を施した送信パルスを発生する。その後、相関処理器7において目標によって反射された受信信号と参照信号を用いて時間領域または周波数領域で相関処理を行い、圧縮結果(以下、相互相関特性と呼ぶ)ピーク検出器10へ出力する。ここで、参照信号発生器6においては、例えば、信号の損失が発生しない矩形のウェイティングを用いる。
図2は、非線形周波数変調を施したパルスが受ける、目標によるドップラ偏移の有無の影響(相互相関特性)を模式的に示したものである。同図において、アップチャープの非線形周波数変調を施した送信パルスを送信した場合、目標のドップラ速度が0であればピーク位置(目標位置)の両側のサイドローブ特性は対称となり、目標のドップラ速度が正であれば相互相関特性のピーク位置の遠方側のサイドローブ、特に第1サイドローブレベルが上昇し、目標のドップラ速度が負であればピーク位置に対して近距離側の第1サイドローブレベルが上昇する。
また、ダウンチャープの非線形周波数変調を施した送信パルスを送信した場合には、目標のドップラ速度が正であれば相互相関特性のピーク位置の近距離側のサイドローブ、特に第1サイドローブレベルが上昇し、目標のドップラ速度が負であればピーク位置に対して遠方側の第1サイドローブレベルが上昇する。なお、目標のドップラ偏移の影響を受けるのは線形周波数変調の場合も同様であるが、非線形周波数変調の方がより影響が大きい。すなわち、ドップラ偏移に対する耐性(ドップラ・トレランス)は、線形周波数変調は高く、非線形周波数変調は線形周波数変調よりも低いことが知られている(例えば、Merrill I. Skolnik著、「RADAR HANDBOOK、Third Edition」McGaw−Hill Professional、2008、p.8.12〜8.15を参照)。
図3は、第1サイドローブ比較器12及びデータ合成器13の動作の模式図である。
ドップラ偏移に対しては以上のような特性が得られることから、第1サイドローブ比較器12では、送信パルス毎に、第1サイドローブ検出器11の出力である2つのサイドローブレベルの大小を比較し、ピーク位置からサイドローブレベルが小さい側のデータを切り出しデータ合成器13へ出力する。なお、2つのサイドローブレベルが等しい場合には、例えば、アップチャープの場合にはピーク位置から近距離側のデータを、ダウンチャープの場合にはピーク位置から遠距離側のデータを切り出しデータ合成器13へ出力する。
ドップラ偏移に対しては以上のような特性が得られることから、第1サイドローブ比較器12では、送信パルス毎に、第1サイドローブ検出器11の出力である2つのサイドローブレベルの大小を比較し、ピーク位置からサイドローブレベルが小さい側のデータを切り出しデータ合成器13へ出力する。なお、2つのサイドローブレベルが等しい場合には、例えば、アップチャープの場合にはピーク位置から近距離側のデータを、ダウンチャープの場合にはピーク位置から遠距離側のデータを切り出しデータ合成器13へ出力する。
データ合成器13では、アップチャープを送信したときの相互相関特性と、ダウンチャープを送信したときの相互相関特性から、サイドローブの低い領域同士切り出したものを合成する。
信号検出器8では、合成されたデータから所定の閾値以上のデータの位置を検出し、測距器9へ出力する。測距器9では、検出された位置を距離に変換することで、レーダ装置と目標との距離を算出する。そして、以上の処理を観測レンジに亘って行う。
信号検出器8では、合成されたデータから所定の閾値以上のデータの位置を検出し、測距器9へ出力する。測距器9では、検出された位置を距離に変換することで、レーダ装置と目標との距離を算出する。そして、以上の処理を観測レンジに亘って行う。
この発明の実施の形態1に係るレーダ装置は、目標の相対的な速度が不明な場合でも、サイドローブレベルの低いパルス圧縮結果を得ることができる。また、演算量やメモリ空間の増大を招くことなく、比較的簡単な構成で実現することができる。
実施の形態2.
なお、図2に示した、目標のドップラ速度(偏移)と相互相関特性の関係は式(1)に示すアンビギュイティ関数から概算することができる。式(1)において、χはアンビギュイティ関数、τは時間遅延、fdはドップラ偏移、uは送信信号、u*はuの複素共役、jは虚数単位、Vはドップラ速度、λは送信波長である。
なお、図2に示した、目標のドップラ速度(偏移)と相互相関特性の関係は式(1)に示すアンビギュイティ関数から概算することができる。式(1)において、χはアンビギュイティ関数、τは時間遅延、fdはドップラ偏移、uは送信信号、u*はuの複素共役、jは虚数単位、Vはドップラ速度、λは送信波長である。
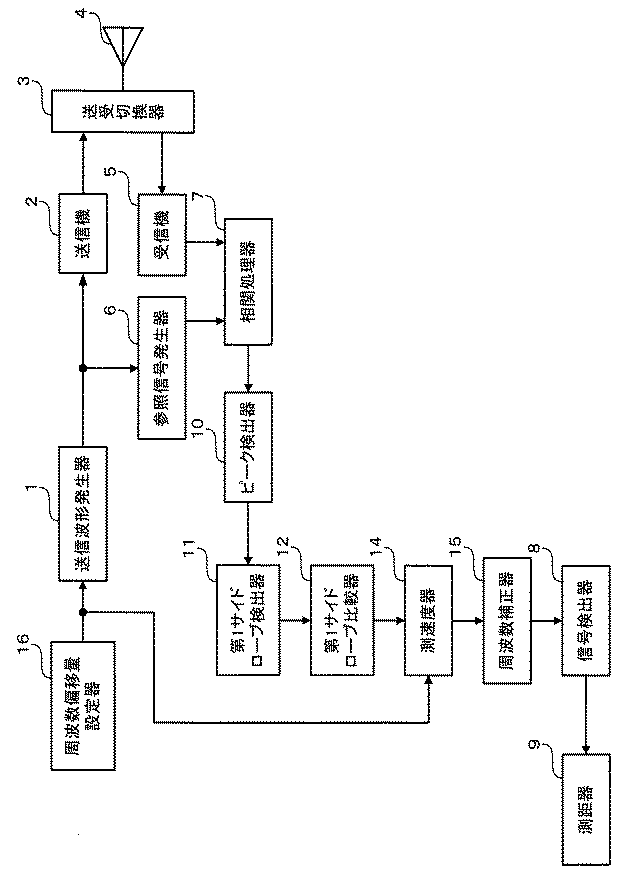
図4は、この発明の実施の形態2に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態2に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置に測速度器14を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
測速度器14は、第1サイドローブ比較器12の出力を入力とし、第1サイドローブのレベル差から目標のドップラ偏移若しくはドップラ速度を算出する。
この発明の実施の形態2に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置に測速度器14を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
測速度器14は、第1サイドローブ比較器12の出力を入力とし、第1サイドローブのレベル差から目標のドップラ偏移若しくはドップラ速度を算出する。
目標のドップラ偏移(ドップラ速度)を算出する方法としては、例えば、式(1)の関係から、所定ドップラ偏移があるときの第1サイドローブレベル差を算出したテーブルを保持しておき、それらを比較することが考えられる。
また、それとは異なる方法として、2つのサイドローブレベル差が0になるように相互相関特性に乗ずる周波数偏移量を更新する操作を繰り返すことが考えられる。
また、それとは異なる方法として、2つのサイドローブレベル差が0になるように相互相関特性に乗ずる周波数偏移量を更新する操作を繰り返すことが考えられる。
この発明の実施の形態2に係るレーダ装置は、簡単な構成で、目標の距離に加え、目標のドップラ偏移(ドップラ速度)を算出することができる。また、1つ(アップチャープまたはダウンチャープ)の送信パルスのみで実現できるため、目標の測距及び測速度を短時間で行うことが可能となる。
実施の形態3.
図5は、この発明の実施の形態3に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態3に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置のデータ合成器13の代わりに測速度器14及び周波数補正器15を適用したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
測速度器14は、第1サイドローブレベルの値から目標のドップラ偏移(ドップラ速度)を求める。周波数補正器15は、測速度器14が求めたドップラ偏移に基づき、相互相関特性を補正する。
図5は、この発明の実施の形態3に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態3に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置のデータ合成器13の代わりに測速度器14及び周波数補正器15を適用したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
測速度器14は、第1サイドローブレベルの値から目標のドップラ偏移(ドップラ速度)を求める。周波数補正器15は、測速度器14が求めたドップラ偏移に基づき、相互相関特性を補正する。
次に、この発明の実施の形態3に係るレーダ装置の動作について説明する。
第1サイドローブ比較器12の出力である第1サイドローブレベル差を測速度器14に入力し、測速度器14は目標のドップラ偏移量を算出し、周波数補正器15へ出力する。周波数補正器15は、入力されたドップラ偏移量を−1倍し、その値を相互相関関数に乗ずる。このとき、目標のドップラ偏移量が相殺され、ドップラ偏移のない、すなわち、ドップラ偏移によるピーク位置のずれや、サイドローブレベルの上昇のない相互相関特性が得られる。その後、信号検出器8において閾値処理等によって目標検出を行う。
第1サイドローブ比較器12の出力である第1サイドローブレベル差を測速度器14に入力し、測速度器14は目標のドップラ偏移量を算出し、周波数補正器15へ出力する。周波数補正器15は、入力されたドップラ偏移量を−1倍し、その値を相互相関関数に乗ずる。このとき、目標のドップラ偏移量が相殺され、ドップラ偏移のない、すなわち、ドップラ偏移によるピーク位置のずれや、サイドローブレベルの上昇のない相互相関特性が得られる。その後、信号検出器8において閾値処理等によって目標検出を行う。
この発明の実施の形態3に係るレーダ装置は、算出した目標のドップラ偏移量を補正した後、信号検出を行っているので、ドップラ偏移によるピーク位置、すなわち、目標距離のずれによる測距精度劣化や、サイドローブレベル上昇による偽目標検出の影響を低減できる。
実施の形態4.
図6は、この発明の実施の形態4に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態4に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
周波数偏移量設定器16は、送信パルスに与える周波数偏移量を設定し、その周波数偏移量を送信波形発生器1及び測速度器14へ出力する。
図6は、この発明の実施の形態4に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態4に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
周波数偏移量設定器16は、送信パルスに与える周波数偏移量を設定し、その周波数偏移量を送信波形発生器1及び測速度器14へ出力する。
この発明の実施の形態4に係るレーダ装置は、目標の測距の前に目標の概算的なドップラ速度が既知の場合、予めそのドップラ偏移分だけ送信波形の中に加えているので、目標のドップラ偏移による相互相関特性のピークの減少や、ずれや、サイドローブレベルの上昇等の影響をより低減することができる。また、後段で周波数偏移量補正のための演算量を削減することもできる。
実施の形態5.
図7は、この発明の実施の形態5に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態5に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16Bを追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
この実施の形態では、測速度器14で算出したドップラ速度をドップラ周波数に変換して、周波数偏移量設定器16Bへの入力としている。
図7は、この発明の実施の形態5に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態5に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16Bを追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
この実施の形態では、測速度器14で算出したドップラ速度をドップラ周波数に変換して、周波数偏移量設定器16Bへの入力としている。
この実施の形態によるレーダ装置では、ある時刻に取得した目標のドップラ偏移量を次の時刻、例えば、パルス繰り返し周期後の時刻に送信する送信信号に加えている。
この発明の実施の形態5に係るレーダ装置は、所定時間毎に送信信号に目標のドップラ偏移量を加味しているので、継続的にドップラ偏移による相互相関特性の劣化の影響のないデータを取得することが可能である。また、毎回のドップラ偏移量算出の演算量の低減が可能である。
実施の形態6.
図8は、この発明の実施の形態6に係るレーダ装置の動作を説明するための、送信パルスに与える周波数及び周波数偏移量の関係である。
この発明の実施の形態6に係るレーダ装置は、この発明の実施の形態4に係るレーダ装置の構成と同様であるが、周波数偏移量設定部16が設定する周波数偏移量に違いがある。すなわち、周波数偏移量設定部16は、図8に示すように、送信波形発生器1に所定の周波数偏移量0、fS、−fS、2fS、−2fS、・・・を与えている。そして、周波数偏移量の差分は、例えば、想定する目標の速度区分(例えば、100km/h毎に目標の速度を把握する場合等)や、所望速度分解能に対応する周波数とする。このようなパルス列を送信すると、目標のドップラ速度(偏移)に近い送信信号の周波数偏移において第1サイドローブレベル差が最小となることを利用し、目標の概算的なドップラ速度を得ることができる。
図8は、この発明の実施の形態6に係るレーダ装置の動作を説明するための、送信パルスに与える周波数及び周波数偏移量の関係である。
この発明の実施の形態6に係るレーダ装置は、この発明の実施の形態4に係るレーダ装置の構成と同様であるが、周波数偏移量設定部16が設定する周波数偏移量に違いがある。すなわち、周波数偏移量設定部16は、図8に示すように、送信波形発生器1に所定の周波数偏移量0、fS、−fS、2fS、−2fS、・・・を与えている。そして、周波数偏移量の差分は、例えば、想定する目標の速度区分(例えば、100km/h毎に目標の速度を把握する場合等)や、所望速度分解能に対応する周波数とする。このようなパルス列を送信すると、目標のドップラ速度(偏移)に近い送信信号の周波数偏移において第1サイドローブレベル差が最小となることを利用し、目標の概算的なドップラ速度を得ることができる。
この発明の実施の形態6に係るレーダ装置は、目標のドップラ速度を算出する際の反復計算や、テーブルの保持等をする必要がないので、簡単な構成により、目標の距離と速度を求めることが可能となる。
実施の形態7.
図9は、この発明の実施の形態7に係るレーダ装置の動作を説明するための、受信信号のスペクトルである。
この発明の実施の形態7に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置と構成は同様であるが、測距が異なっている。
図9は、この発明の実施の形態7に係るレーダ装置の動作を説明するための、受信信号のスペクトルである。
この発明の実施の形態7に係るレーダ装置は、この発明の実施の形態1に係るレーダ装置と構成は同様であるが、測距が異なっている。
この発明の実施の形態7に係るレーダ装置では、この発明の実施の形態1に係るレーダ装置と同様に、アップチャープとダウンチャープの2組のパルスを送信する。一般に、目標にドップラ偏移がある場合には、レンジサイドローブが上昇することの他に、相互相関特性のピーク位置が正しい目標位置よりもずれ、また、ずれの方向はアップチャープとダウンチャープの諸元が同じであれば対称となる。そこで、この発明の実施の形態7に係るレーダ装置では、アップチャープの場合の相互相関特性と、ダウンチャープの場合の相互相関特性同士の和と差の算出結果から目標位置を算出する。このようにすることにより、挿引帯域幅で決まる距離分解能以上に精度良く測距ができる。
また、目標のドップラ速度が比較的小さく、通常の、ドップラ偏移量を0と仮定した送信信号ではピーク位置のずれが極めて小さい場合には、例えば、図6の周波数偏移量設定器16により、受信信号の周波数偏移が大きくなるように、送信信号に周波数偏移を与えることで、この処理ができるようになる。
この発明の実施の形態7に係るレーダ装置は、通常の非線形パルス圧縮処理で得られる距離分解能以上の精度で測距を行うことが可能となる。
実施の形態8.
図10は、この発明の実施の形態8に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態8に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16Cを追加し、それに伴い参照信号発生器6Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
周波数偏移量設定器16Cは、測速度器14で算出したドップラ速度をドップラ周波数に変換し、変換したドップラ周波数を周波数偏移量として参照信号発生器6Bへ出力する。
参照信号発生器6Bは、送信波形発生器1が発生した送信波形の周波数を入力された周波数偏移量で偏移し、その偏移された周波数の参照信号を発生する。
図10は、この発明の実施の形態8に係るレーダ装置を示すブロック構成図である。
この発明の実施の形態8に係るレーダ装置は、この発明の実施の形態3に係るレーダ装置に周波数偏移量設定器16Cを追加し、それに伴い参照信号発生器6Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
周波数偏移量設定器16Cは、測速度器14で算出したドップラ速度をドップラ周波数に変換し、変換したドップラ周波数を周波数偏移量として参照信号発生器6Bへ出力する。
参照信号発生器6Bは、送信波形発生器1が発生した送信波形の周波数を入力された周波数偏移量で偏移し、その偏移された周波数の参照信号を発生する。
この発明の実施の形態8に係るレーダ装置は、この発明の実施の形態5に係るレーダ装置において送信信号に与えていた周波数偏移量を、参照信号に与えられるようにしたものであり、基本的な動作は同じである。ただし、実施の形態5では、送信機は与える周波数偏移分の帯域を持つ必要があったが、この実施の形態では送信機が持つ帯域は不変であるため、広帯域な増幅器等が不要となり、装置構成の簡易化が可能である。
1 送信波形発生器、2 送信機、3 送受信切換器、4 空中線、5 受信機、6、6B 参照信号発生器、7 相関処理器、8 信号検出器、9 測距器、10 ピーク検出器、11 第1サイドローブ検出器、12 第1サイドローブ比較器、13 データ合成器、14 測速度器、15 周波数補正器、16、16B、16C 周波数偏移量設定器。
Claims (8)
- 送信波形発生器により非線形周波数変調が施こされた送信波形の送信波を空間に放射するとともに目標からの反射波を受信し、且つ上記送信波形に対応している参照信号発生器により発生された参照信号と受信した反射波から得られた受信信号との相互相関処理を行うとともに相互相関処理の結果から距離を測定するレーダ装置において、
上記相互相関処理の結果からピーク位置を検出するピーク検出器と、
該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、
上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、
アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、
データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、
上記検出された位置を距離に変換する測距器と、
を備えたことを特徴とするレーダ装置。 - 上記第1サイドローブの振幅値から目標の速度を算出する測速度器を備えたことを特徴とする請求項1に記載のレーダ装置。
- 上記第1サイドローブの振幅値から目標のドップラ速度を算出する測速度器と、
上記目標のドップラ速度から周波数偏移量を算出し、算出した周波数偏移量により相互相関特性を補正する周波数補正器と、
を備えたことを特徴とする請求項1に記載のレーダ装置。 - 上記目標のドップラ速度から算出される目標の周波数偏移量を上記送信信号に加える周波数偏移量設定器を備えたことを特徴とする請求項3に記載のレーダ装置。
- パルス送信毎に得られる上記目標の周波数偏移量を次回に送信する送信パルスの周波数偏移量として加える周波数偏移量設定器を備えたことを特徴とする請求項4に記載のレーダ装置。
- 予め定められた周波数偏移量を与えた送信パルス列を送信し、受信された受信信号から得られる最も第1サイドローブレベルの差が小さいものを選択し、目標のドップラ周波数の概算値とすることを特徴とする請求項1に記載のレーダ装置。
- 上昇方向に周波数挿引した送信パルスと、下降方向に周波数挿引した送信パルスのそれぞれの相互相関結果の和と差の算出結果から目標位置を算出することを特徴とする請求項1に記載のレーダ装置。
- パルス送信毎に得られる目標の周波数偏移量を次回に送信する送信信号に対応する参照信号の周波数偏移量として加える周波数偏移量設定器を備えたことを特徴とする請求項3に記載のレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110345A JP2011237338A (ja) | 2010-05-12 | 2010-05-12 | レーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110345A JP2011237338A (ja) | 2010-05-12 | 2010-05-12 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011237338A true JP2011237338A (ja) | 2011-11-24 |
Family
ID=45325479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010110345A Pending JP2011237338A (ja) | 2010-05-12 | 2010-05-12 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011237338A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016090297A (ja) * | 2014-10-31 | 2016-05-23 | 日本信号株式会社 | 地中レーダ装置 |
| RU2614038C1 (ru) * | 2016-01-19 | 2017-03-22 | Акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" | Способ и устройство обнаружения объектов поиска, содержащих металлические контакты, в нелинейных радиолокаторах ближнего действия |
| WO2018038128A1 (ja) * | 2016-08-26 | 2018-03-01 | 日本電気株式会社 | 移動目標探知システム及び移動目標探知方法 |
| RU2713433C1 (ru) * | 2019-05-13 | 2020-02-05 | Акционерное общество "Научно-производственное предприятие "Салют" | Способ обнаружения, идентификации и мониторинга вибрирующих объектов |
| RU2723430C1 (ru) * | 2017-01-04 | 2020-06-11 | ЗедТиИ КОРПОРЕЙШН | Способ и устройство для определения и передачи параметра опорного сигнала, терминальное устройство и базовая станция |
| CN111830507A (zh) * | 2019-04-17 | 2020-10-27 | 联发科技股份有限公司 | 物体检测方法及装置 |
| CN114879146A (zh) * | 2022-05-17 | 2022-08-09 | 西安电子工程研究所 | 一种改善nlfm信号多普勒容限问题的方法 |
| JP2024508328A (ja) * | 2021-03-04 | 2024-02-26 | ディープサイト テクノロジー インコーポレイテッド | 窓化非線形周波数変調チャープを使用する音響画像処理及び測定 |
-
2010
- 2010-05-12 JP JP2010110345A patent/JP2011237338A/ja active Pending
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016090297A (ja) * | 2014-10-31 | 2016-05-23 | 日本信号株式会社 | 地中レーダ装置 |
| RU2614038C1 (ru) * | 2016-01-19 | 2017-03-22 | Акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" | Способ и устройство обнаружения объектов поиска, содержащих металлические контакты, в нелинейных радиолокаторах ближнего действия |
| WO2018038128A1 (ja) * | 2016-08-26 | 2018-03-01 | 日本電気株式会社 | 移動目標探知システム及び移動目標探知方法 |
| JPWO2018038128A1 (ja) * | 2016-08-26 | 2019-06-24 | 日本電気株式会社 | 移動目標探知システム及び移動目標探知方法 |
| US11125870B2 (en) | 2016-08-26 | 2021-09-21 | Nec Corporation | Moving-target detection system and moving-target detection method |
| RU2723430C1 (ru) * | 2017-01-04 | 2020-06-11 | ЗедТиИ КОРПОРЕЙШН | Способ и устройство для определения и передачи параметра опорного сигнала, терминальное устройство и базовая станция |
| US11201709B2 (en) | 2017-01-04 | 2021-12-14 | Zte Corporation | Method and apparatus for determining and transmitting parameter of reference signal, terminal device and base station |
| CN111830507A (zh) * | 2019-04-17 | 2020-10-27 | 联发科技股份有限公司 | 物体检测方法及装置 |
| RU2713433C1 (ru) * | 2019-05-13 | 2020-02-05 | Акционерное общество "Научно-производственное предприятие "Салют" | Способ обнаружения, идентификации и мониторинга вибрирующих объектов |
| JP2024508328A (ja) * | 2021-03-04 | 2024-02-26 | ディープサイト テクノロジー インコーポレイテッド | 窓化非線形周波数変調チャープを使用する音響画像処理及び測定 |
| US12569144B2 (en) | 2021-03-04 | 2026-03-10 | Deepsight Technology, Inc. | Acoustic imaging and measurements using windowed nonlinear frequency modulation chirp |
| CN114879146A (zh) * | 2022-05-17 | 2022-08-09 | 西安电子工程研究所 | 一种改善nlfm信号多普勒容限问题的方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5247068B2 (ja) | レーダ装置 | |
| JP5871559B2 (ja) | レーダ装置 | |
| JP6818541B2 (ja) | レーダ装置および測位方法 | |
| JP2011237338A (ja) | レーダ装置 | |
| JP5072694B2 (ja) | 目標検出装置 | |
| JP2016151425A (ja) | レーダ装置 | |
| JP5460290B2 (ja) | レーダ装置 | |
| JP2017146273A (ja) | レーダ装置 | |
| JP2007322331A (ja) | レーダ装置 | |
| JP6164918B2 (ja) | レーダ装置 | |
| JP6279193B2 (ja) | 物体検出装置及びセンサ装置 | |
| JP2009103510A (ja) | レーダ装置 | |
| JP2010175457A (ja) | レーダ装置 | |
| KR20190135267A (ko) | Cw 레이더 및 cw 레이더를 이용한 거리 측정 방법 | |
| JP5625326B2 (ja) | レーダ装置及びその距離測定方法 | |
| JP5574907B2 (ja) | レーダ装置 | |
| JP5464001B2 (ja) | レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム | |
| KR101634455B1 (ko) | 선형 주파수 변조 신호와 잡음 신호를 이용한 레이더 및 이의 제어 방법 | |
| US11927666B2 (en) | Signal processing apparatus and signal processing method | |
| JP2008304252A (ja) | レーダ装置 | |
| JP4702117B2 (ja) | パルスレーダ装置及び測距方法 | |
| JP2015049074A (ja) | レーダ及び物体検出方法 | |
| JP2013113723A (ja) | レーダ装置 | |
| JP2013234943A (ja) | パルス圧縮装置 | |
| KR101465057B1 (ko) | 쌍곡선 주파수 변조 신호를 사용하는 광대역 능동 소나 검출기에서 확장된 레플리카 설계 방법 및 장치 |