JP2011141663A - 無人搬送車、および、その走行制御方法 - Google Patents
無人搬送車、および、その走行制御方法 Download PDFInfo
- Publication number
- JP2011141663A JP2011141663A JP2010001236A JP2010001236A JP2011141663A JP 2011141663 A JP2011141663 A JP 2011141663A JP 2010001236 A JP2010001236 A JP 2010001236A JP 2010001236 A JP2010001236 A JP 2010001236A JP 2011141663 A JP2011141663 A JP 2011141663A
- Authority
- JP
- Japan
- Prior art keywords
- guided vehicle
- automatic guided
- distance
- deceleration
- stop
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
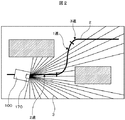
【解決手段】地図データと、走行速度が設定された経路データとを保持し、レーザにより周辺環境の状況を計測して、地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、走行速度に応じて、走行速度が大きくなればなるほど大きくなるように、移動先距離を決定する。そして、基準点から移動先距離にあたる経路上の点を、移動先位置として、その移動先位置に向かって走行させる。また、その走行速度に応じて、減速範囲と、停止範囲を定めて、障害物をそれらの範囲内で検知したときには、それぞれ無人搬送車を減速または停止するように制御する。この減速範囲と停止範囲も、走行速度に応じて広くなるようにとる。
【選択図】図11
Description
以下、本発明に係る第一の実施形態を、図1ないし図5を用いて説明する。
先ず、図1を用いて本発明の第一の実施形態の無人搬送車のハードウェア構成について説明する。
図1は、本発明の第一の実施形態の無人搬送車のハードウェア構成を示す図である。
図2は、本発明の第一の実施形態の無人搬送車の走行を説明する図である。
図3は、本発明の第一の実施形態の無人搬送車の走行制御の処理を示すフローチャートである。
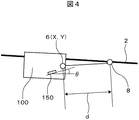
図4および図5は、目標となる移動先位置を決定する処理を説明する図である。
以下、本発明に係る第二の実施形態を、図6ないし図12を用いて説明する。
図6は、本発明の第二の実施形態の無人搬送車のハードウェア構成を示す図である。
図7は、本発明の第二の実施形態の無人搬送車の走行制御の処理を示すフローチャートである。
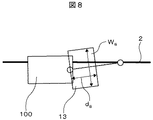
図8は、現在位置(X,Y)からの停止範囲を説明する図である。
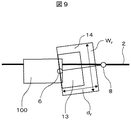
図9は、図8の停止範囲に加えて、現在位置(X,Y)からの減速範囲を説明する図である。
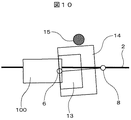
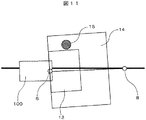
図10および図11は、障害物があるときの現在位置(X,Y)からの減速範囲と停止範囲における無人搬送車100の動作を説明する図である。
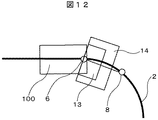
図12は、経路がカーブしているときの現在位置(X,Y)からの減速範囲と停止範囲を説明する図である。
Claims (11)
- 地図データと、前記地図データの表す地図の経路を示す経路データとを格納し、レーザにより周辺環境の状況を計測して、前記地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、
前記無人搬送車の走行速度に応じて、移動先距離を決定し、前記無人搬送車の基準点から前記移動先距離にあたる経路データ上の点を、移動先位置とし、前記現在位置から前記移動先位置に向かって走行するように制御することを特徴とする無人搬送車。 - 前記移動先距離は、前記無人搬送車の走行速度が大きくなればなるほど、長くすることを特徴とする請求項1記載の無人搬送車。
- 前記経路データに、前記無人搬送車の走行速度が設定されていることを特徴とする請求項1記載の無人搬送車。
- 前記現在位置から前記移動先位置に向かって走行するときに、操舵輪に該当する操舵角と走行速度を指示することを特徴とする請求項1記載の無人搬送車。
- レーザにより障害物を検知し、
前記無人搬送車の走行速度に応じて、前記移動先距離よりも小さな減速距離を求め、前記減速距離を一辺とする長方形状の減速範囲内に、前記障害物を検知したときに、減速するように制御することを特徴とする請求項1記載の無人搬送車。 - 前記減速範囲の一辺とする減速幅は、前記無人搬送車の走行速度に応じて定められることを特徴とする請求項1記載の無人搬送車。
- レーザにより障害物を検知し、
前記無人搬送車の走行速度に応じて、前記移動先距離よりも小さな停止距離を求め、前記停止距離を一辺とする長方形状の停止範囲内に、前記障害物を検知したときに、停止するように制御することを特徴とする請求項1記載の無人搬送車。 - 前記停止範囲の一辺とする停止幅は、前記無人搬送車の走行速度に応じて定められることを特徴とする請求項1記載の無人搬送車。
- レーザにより障害物を検知し、
前記無人搬送車の走行速度に応じて、前記移動先距離よりも小さな停止距離と、停止幅とを求め、前記停止距離と前記停止幅を両辺とする長方形状の停止範囲内に、前記障害物を検知したときに、停止するように制御され、
前記無人搬送車の走行速度に応じて、前記移動先距離よりも小さな減速距離と、減速幅とを求め、前記減速距離と前記減速幅を両辺とする長方形状の減速範囲内に、前記障害物を検知したときに、減速するように制御され、
前記停止距離は、前記減速距離よりも小さいか等しく、前記停止幅は、前記減速幅よりも小さいか等しいように設定されることを特徴とする請求項1記載の無人搬送車。 - コントローラと、地図データと、前記地図データの表す地図の経路を示す経路データとを格納するメモリと、レーザ距離センサと、操舵輪と、前記操舵輪の操舵角を指示するプログラマブルロジックコントローラとを有する無人搬送車の走行制御方法において、
前記コントローラにより、前記レーザ距離センサの計測結果と、前記地図データと計測されたデータとをマッチングして、現在位置を求めるステップと、
前記コントローラが、前記経路データに設定された速度を読み取るステップと、
前記コントローラが、前記無人搬送車の走行速度に応じて、移動先距離を決定するステップと、
前記コントローラが、前記無人搬送車の基準点から前記移動先距離にあたる経路上の点を、移動先位置として求めるステップと、
前記コントローラが、前記移動先位置に向かって走行するように、前記プログラマブルロジックコントローラに操舵角を指示するステップとを有することを特徴とする無人搬送車の走行制御方法。 - さらに、
前記レーザ距離センサが障害物を検知するステップと、
前記コントローラが、前記無人搬送車の走行速度に応じて、移動先距離よりも小さな減速距離を決定し、前記減速距離に基づいた減速範囲を決定するステップと、
前記コントローラが、前記無人搬送車の走行速度に応じて、前記減速距離よりも小さいか等しい停止距離を決定し、前記減速距離に基づいた減速範囲を決定し、
前記コントローラが、前記障害物が前記減速範囲にあると判定したときには、前記無人搬送車が減速するように制御するステップと、
前記コントローラが、前記障害物が前記停止範囲にあると判定したときには、前記無人搬送車が停止するように制御するステップとを有することを特徴とする無人搬送車の走行制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010001236A JP2011141663A (ja) | 2010-01-06 | 2010-01-06 | 無人搬送車、および、その走行制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010001236A JP2011141663A (ja) | 2010-01-06 | 2010-01-06 | 無人搬送車、および、その走行制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011141663A true JP2011141663A (ja) | 2011-07-21 |
Family
ID=44457473
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010001236A Pending JP2011141663A (ja) | 2010-01-06 | 2010-01-06 | 無人搬送車、および、その走行制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011141663A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014181647A1 (ja) * | 2013-05-07 | 2014-11-13 | 村田機械株式会社 | 自律移動体の移動制御装置、自律移動体、及び自律移動体の制御方法 |
| KR101510250B1 (ko) * | 2013-11-05 | 2015-04-08 | 주식회사 이노텍 | 컨베이어와 연계된 무인반송대차 모니터링 시스템 및 그 제어방법 |
| US9200912B2 (en) | 2013-11-08 | 2015-12-01 | Hanwha Techwin Co., Ltd. | Apparatus and method of controlling traveling of automatic guided vehicle |
| GB2548969A (en) * | 2016-02-11 | 2017-10-04 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| KR20180103462A (ko) * | 2017-03-10 | 2018-09-19 | 현대자동차주식회사 | 라이더 스캔 데이터의 누적에 의한 자율주행 자동차의 위치인식 시스템 및 그 방법 |
| CN110502018A (zh) * | 2019-09-06 | 2019-11-26 | 百度在线网络技术(北京)有限公司 | 确定车辆安全区域的方法、装置、电子设备及存储介质 |
| KR20200060650A (ko) * | 2018-11-22 | 2020-06-01 | 현대자동차주식회사 | 차량 및 그 트레일러 결합 방법 |
| WO2022237374A1 (zh) * | 2021-05-14 | 2022-11-17 | 灵动科技(北京)有限公司 | 用于仓库中的物流车的控制方法和控制装置 |
| US11614750B2 (en) | 2018-03-28 | 2023-03-28 | Nec Corporation | Self-propelled device, self-propelling method, and recording medium |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172338A (ja) * | 1998-12-01 | 2000-06-23 | Kawasaki Heavy Ind Ltd | 車両の走行制御装置およびそれを用いた車両 |
| JP2001350520A (ja) * | 2000-06-08 | 2001-12-21 | Nippon Sharyo Seizo Kaisha Ltd | 無人搬送車の走行制御装置 |
| JP2002278624A (ja) * | 2001-03-19 | 2002-09-27 | Nippon Steel Corp | 走行キャリア |
| JP2005339582A (ja) * | 2005-08-09 | 2005-12-08 | Yanmar Co Ltd | 無人搬送車の走行制御機構 |
-
2010
- 2010-01-06 JP JP2010001236A patent/JP2011141663A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172338A (ja) * | 1998-12-01 | 2000-06-23 | Kawasaki Heavy Ind Ltd | 車両の走行制御装置およびそれを用いた車両 |
| JP2001350520A (ja) * | 2000-06-08 | 2001-12-21 | Nippon Sharyo Seizo Kaisha Ltd | 無人搬送車の走行制御装置 |
| JP2002278624A (ja) * | 2001-03-19 | 2002-09-27 | Nippon Steel Corp | 走行キャリア |
| JP2005339582A (ja) * | 2005-08-09 | 2005-12-08 | Yanmar Co Ltd | 無人搬送車の走行制御機構 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014181647A1 (ja) * | 2013-05-07 | 2014-11-13 | 村田機械株式会社 | 自律移動体の移動制御装置、自律移動体、及び自律移動体の制御方法 |
| JP2014219799A (ja) * | 2013-05-07 | 2014-11-20 | 村田機械株式会社 | 自律移動体の移動制御装置、自律移動体、及び自律移動体の制御方法 |
| KR101510250B1 (ko) * | 2013-11-05 | 2015-04-08 | 주식회사 이노텍 | 컨베이어와 연계된 무인반송대차 모니터링 시스템 및 그 제어방법 |
| US9200912B2 (en) | 2013-11-08 | 2015-12-01 | Hanwha Techwin Co., Ltd. | Apparatus and method of controlling traveling of automatic guided vehicle |
| US10967846B2 (en) | 2016-02-11 | 2021-04-06 | Jaguar Land Rover Limited | Vehicle speed control |
| GB2548969B (en) * | 2016-02-11 | 2018-08-29 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| GB2548969A (en) * | 2016-02-11 | 2017-10-04 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| KR20180103462A (ko) * | 2017-03-10 | 2018-09-19 | 현대자동차주식회사 | 라이더 스캔 데이터의 누적에 의한 자율주행 자동차의 위치인식 시스템 및 그 방법 |
| KR102283773B1 (ko) | 2017-03-10 | 2021-07-29 | 현대자동차주식회사 | 라이더 스캔 데이터의 누적에 의한 자율주행 자동차의 위치인식 시스템 및 그 방법 |
| US11614750B2 (en) | 2018-03-28 | 2023-03-28 | Nec Corporation | Self-propelled device, self-propelling method, and recording medium |
| KR20200060650A (ko) * | 2018-11-22 | 2020-06-01 | 현대자동차주식회사 | 차량 및 그 트레일러 결합 방법 |
| KR102699142B1 (ko) | 2018-11-22 | 2024-08-28 | 현대자동차주식회사 | 차량 및 그 트레일러 결합 방법 |
| CN110502018A (zh) * | 2019-09-06 | 2019-11-26 | 百度在线网络技术(北京)有限公司 | 确定车辆安全区域的方法、装置、电子设备及存储介质 |
| CN110502018B (zh) * | 2019-09-06 | 2022-04-12 | 百度在线网络技术(北京)有限公司 | 确定车辆安全区域的方法、装置、电子设备及存储介质 |
| WO2022237374A1 (zh) * | 2021-05-14 | 2022-11-17 | 灵动科技(北京)有限公司 | 用于仓库中的物流车的控制方法和控制装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011141663A (ja) | 無人搬送車、および、その走行制御方法 | |
| CN102269994B (zh) | 无人搬送车以及行驶控制方法 | |
| CN101971116B (zh) | 自动移动体及其控制方法、以及控制系统 | |
| JP6599543B2 (ja) | 自動搬送車 | |
| EP3088280B1 (en) | Autonomous driving vehicle system | |
| US20210284198A1 (en) | Self-driving vehicle path adaptation system and method | |
| KR101503418B1 (ko) | 반자동 주차 기계 | |
| US20160062357A1 (en) | Mobile Body and Position Detection Device | |
| KR101049906B1 (ko) | 자율 이동 장치 및 이의 충돌 회피 방법 | |
| WO2019026761A1 (ja) | 移動体およびコンピュータプログラム | |
| CN108369418A (zh) | 用于自主车辆的虚拟线路跟随和改进方法 | |
| JP7043847B2 (ja) | 無人搬送車の制御システム及び制御方法 | |
| JP2021047670A (ja) | 無人搬送車の制御システム及び制御方法 | |
| JP2019036302A (ja) | 無人搬送車の制御装置及び制御方法 | |
| JP2009237851A (ja) | 移動体制御システム | |
| JP4670807B2 (ja) | 移動経路作成方法、自律移動体および自律移動体制御システム | |
| JP2021056764A (ja) | 移動体 | |
| JP2015055906A (ja) | 移動体の走行制御手段に対して制御指令を出力する位置検出装置及び移動体システム | |
| JP2009129016A (ja) | 移動経路作成方法、自律移動体及び自律移動体制御システム | |
| JP6406894B2 (ja) | 環境地図生成制御装置、移動体、及び環境地図生成方法 | |
| JP2018013860A (ja) | 自律移動体制御装置 | |
| JP2009223632A (ja) | 自律移動装置、及び、自律移動装置システム | |
| CN109947105A (zh) | 一种自动牵引车的调速方法和调速装置 | |
| JP2019067001A (ja) | 移動体 | |
| JP2011141665A (ja) | 無人搬送車、および、その走行制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120704 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20130614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130926 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140204 |