JP2011102707A - 測位装置及び測位方法 - Google Patents
測位装置及び測位方法 Download PDFInfo
- Publication number
- JP2011102707A JP2011102707A JP2009256785A JP2009256785A JP2011102707A JP 2011102707 A JP2011102707 A JP 2011102707A JP 2009256785 A JP2009256785 A JP 2009256785A JP 2009256785 A JP2009256785 A JP 2009256785A JP 2011102707 A JP2011102707 A JP 2011102707A
- Authority
- JP
- Japan
- Prior art keywords
- positioning
- information
- current position
- positioning means
- environment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims description 26
- 230000001133 acceleration Effects 0.000 claims description 6
- 230000015556 catabolic process Effects 0.000 abstract description 2
- 238000006731 degradation reaction Methods 0.000 abstract description 2
- 238000012937 correction Methods 0.000 description 12
- 238000011156 evaluation Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1654—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with electromagnetic compass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
【選択図】図1
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
【選択図】図1
Description
本発明は、測位装置及び測位方法に関する。
従来、例えば携帯端末によって位置情報を得る方法としてはGPS(Global Positioning System)が実用的であり、多くの携帯電話への搭載が実現している。しかし、ビル街や屋内のようにGPSの信号が弱い場所においては、携帯電話を携帯する歩行者の位置を自動検出することが難しくなる。この問題を解決する一つの方法として、自律航法を用いた位置測定がある。この自律航法に関連する技術を記載した例として特許文献1〜5及び非特許文献1がある。
特許文献1〜4では、歩行者の動きを観測して、観測した歩行者の動きに基づいて歩行者が移動した距離や方向を算出して自律航法を行っている。また、非特許文献1では、自律航法で観測した誤差をなくすために、ノードとエッジからなる道路ネットワークと、周辺の地物の境界線及び領域とを表した地図データベースを利用している。そして、観測対象の歩行者が周囲の地物境界線と交差した場合や体の向きに大きな角度変化があった場合に補正を行う方法を提示している。また、特許文献5では、歩行者が通常は通路内を移動し、ときには通路外のエリアに進入する環境において、歩行環境情報、移動歩行者からの移動情報、歩行モード設定手段等に基づいて、歩行者の位置座標を補正して歩行者の移動履歴を精度良く求める装置を提示している。
「Personal Positioning Systemにおけるマップマッチング法の提案」全国計測技術大会 学生フォーラム、2001
特許文献1〜5及び非特許文献1では、自律航法を行うにあたって各種センサーにより歩行者の動きを観測し、歩行者の現在位置や移動履歴などを測位する方法が提示されている。しかしながら、過去に測位を行ったときに経験した測位環境の不良等の情報が、新たに測位を行うときに有効に活かされることはなかった。このため、様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
[適用例1]位置情報信号を受信して現在位置を測位する第1の測位手段と、自律航法により現在位置を測位する第2の測位手段と、前記第1の測位手段及び前記第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶する記憶部と、を有し、前記第1の測位手段及び前記第2の測位手段は、前記記憶部に記憶されている前記測位環境情報に基づいて現在位置を測位することを特徴とする測位装置。
上記した測位装置によれば、記憶部は、第1の測位手段及び第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶している。そして、当該測位環境情報に基づいて、第1の測位手段及び第2の測位手段において現在位置を測位する。
したがって、測位環境情報には、第1の測位手段及び第2の測位手段において過去に測位したときの測位環境を示す情報が含まれており、第1の測位手段及び第2の測位手段において新たに測位する際、過去に測位したときの測位環境を考慮して測位することができる。これにより、様々な環境下で測位を行う際、過去に経験した測位環境に応じて、より高い精度で測位を行うことが可能になる。
したがって、測位環境情報には、第1の測位手段及び第2の測位手段において過去に測位したときの測位環境を示す情報が含まれており、第1の測位手段及び第2の測位手段において新たに測位する際、過去に測位したときの測位環境を考慮して測位することができる。これにより、様々な環境下で測位を行う際、過去に経験した測位環境に応じて、より高い精度で測位を行うことが可能になる。
[適用例2]前記測位環境情報は、前記第1の測位手段及び前記第2の測位手段において測位したときの経路上のノード及びリンクの少なくともいずれかにおける情報であることを特徴とする上記測位装置。
上記した測位装置によれば、経路上において測位環境が変化し易いノード及びリンクの少なくともいずれかにおける測位環境情報が記憶部に記憶される。これにより、測位環境情報を効率的に利用して現在位置を測位することができる。
[適用例3]前記測位環境情報に基づいて、前記第1の測位手段及び前記第2の測位手段への電力供給を制御することを特徴とする上記測位装置。
上記した測位装置によれば、第1の測位手段及び第2の測位手段への電力供給を、測位環境情報に基づいて制御する。これにより、第1の測位手段及び第2の測位手段における測位の際、測位精度の低い構成機器については、電力供給を抑制して利用しないようにすることで、電力消費を節減することができる。
[適用例4]前記記憶部は、前記第1の測位手段及び前記第2の測位手段において測位したときの経路上の移動履歴を示す移動履歴情報を更に記憶し、前記第1の測位手段及び前記第2の測位手段は、前記記憶部に記憶されている前記移動履歴情報に基づいて現在位置を測位することを特徴とする上記測位装置。
上記した測位装置によれば、記憶部に記憶されている移動履歴情報には、第1の測位手段及び第2の測位手段において過去に測位したときの移動履歴が記憶されており、第1の測位手段及び第2の測位手段において新たに測位する際、過去の移動履歴に基づいて測位することができる。これにより、現在位置がいずれの経路上にあるか判断するときの精度を高めることができる。
[適用例5]前記第2の測位手段は、加速度センサー、角速度センサー、気圧センサー及び地磁気センサーの少なくとも1つを有することを特徴とする上記測位装置。
上記した測位装置によれば、加速度センサー、角速度センサー、気圧センサー及び地磁気センサーの少なくとも1つを利用して自律航法を行い、現在位置を測位することができる。
[適用例6]位置情報信号を受信して現在位置を測位する第1の測位手段と、自律航法により現在位置を測位する第2の測位手段と、を有し、前記第1の測位手段及び前記第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶し、前記第1の測位手段及び前記第2の測位手段は、前記記憶されている前記測位環境情報に基づいて現在位置を測位することを特徴とする測位方法。
上記した測位方法によれば、第1の測位手段及び第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶する。そして、当該測位環境情報に基づいて、第1の測位手段及び第2の測位手段において現在位置を測位する。
したがって、測位環境情報には、第1の測位手段及び第2の測位手段において過去に測位したときの測位環境を示す情報が含まれており、第1の測位手段及び第2の測位手段において新たに測位する際、過去に測位したときの測位環境を考慮して測位することができる。これにより、様々な環境下で測位を行う際、過去に経験した測位環境に応じて、より高い精度で測位を行うことが可能になる。
したがって、測位環境情報には、第1の測位手段及び第2の測位手段において過去に測位したときの測位環境を示す情報が含まれており、第1の測位手段及び第2の測位手段において新たに測位する際、過去に測位したときの測位環境を考慮して測位することができる。これにより、様々な環境下で測位を行う際、過去に経験した測位環境に応じて、より高い精度で測位を行うことが可能になる。
以下、本実施形態に係る測位装置について、図面を参照して説明する。
<測位装置の機能構成>
最初に、本実施形態に係る測位装置の機能構成について説明する。
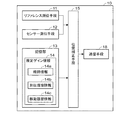
図1は、本実施形態に係る測位装置10の機能構成を示すブロック図である。測位装置10は、第1の測位手段としてのリファレンス測位手段11、第2の測位手段としてのセンサー測位手段12、記憶部13、位置補正手段15、通信手段18等を有している。
最初に、本実施形態に係る測位装置の機能構成について説明する。
図1は、本実施形態に係る測位装置10の機能構成を示すブロック図である。測位装置10は、第1の測位手段としてのリファレンス測位手段11、第2の測位手段としてのセンサー測位手段12、記憶部13、位置補正手段15、通信手段18等を有している。
リファレンス測位手段11は、外部から位置情報信号を受信して、測位装置10を装着したユーザーの現在位置の測位を行う。現在位置を測位する方法として、本実施形態では、GPS(Global Positioning System) 衛星からの位置情報信号を受信し、位置情報信号に含まれる航法メッセージを解析して測位する方法と、RFID(Radio Frequency Identification)及びWifiなどの短距離無線を利用して測位する方法と、照明光を発光するLEDを利用して測位する方法とが適用できる。
なお、現在位置を測位するための位置情報信号の受信方法は、上記に限られず、例えば、カメラ画像に基づいた位置情報の取得等、他の方法によるものであっても良い。
なお、現在位置を測位するための位置情報信号の受信方法は、上記に限られず、例えば、カメラ画像に基づいた位置情報の取得等、他の方法によるものであっても良い。
センサー測位手段12は、各種センサーによる計測値に基づいて自律航法を行い、測位装置10を装着したユーザーの現在位置や方位を推測する。各種センサーとして、本実施形態では、ユーザーの歩行に伴う上下運動及び水平運動等の加速度を検出する加速度センサーと、角速度を検出してユーザーの進行方向を検出する角速度センサーとしてのジャイロセンサーと、ユーザーが位置する場所の高度を検出する気圧センサーと、地磁気ベクトルを検出してユーザーの身体の向きを検出する地磁気センサーとが適用できる。
なお、自律航法に用いる各種センサーは、上記のセンサーの組み合わせに限られず、上記のセンサーの一部のみを用いても、他の種類のセンサーを用いても良い。
なお、自律航法に用いる各種センサーは、上記のセンサーの組み合わせに限られず、上記のセンサーの一部のみを用いても、他の種類のセンサーを用いても良い。
記憶部13は、例えばEEPROM(Electrically Erasable Programmable Read-Only Memory)やフラッシュメモリーのような不揮発性メモリーである。記憶部13には、経路情報14a、測位環境情報14b及び移動履歴情報14cによって構成される推定ゲイン情報14が記憶されている。この推定ゲイン情報14に基づいて、リファレンス測位手段11による測位を行う際には、GPS、RFID、Wifi及びLEDのいずれの位置情報信号を利用するかを判断する。そして、センサー測位手段12による測位を行う際には、利用するセンサーの種類を判断する。
ここで、経路情報14aには、地図上の経路の情報が予め登録されている。また、測位環境情報14bには、これまで、リファレンス測位手段11及びセンサー測位手段12において過去に測位したときの測位環境の情報が登録されている。この測位環境情報14bは、経路情報14aにおける経路上の測位地点に対応した情報となっている。なお、測位環境情報14bへの情報の登録は、測位装置10を製品に搭載して出荷するときに、デフォルト値として予め登録されているようにしても良い。また、ユーザーが地図上の経路を歩行して測位した際、経路上におけるそのときの測位環境の情報を登録するようにしても良い。移動履歴情報14cには、ユーザーが地図上のどの経路を移動したかの履歴が登録されている。
ここで、各経路における測位環境情報14bを履歴だけから得るのではなく、デフォルト値が提供されて、それを個人の通行履歴によって最適化ができる。また、通信手段を用いて同じ経路を通行した他の人(先行、逆行)から最新の測位環境情報14bを得ることが可能である。
位置補正手段15は、リファレンス測位手段11及びセンサー測位手段12における測位データに基づいて、カルマンフィルター等を用いて補正を行い、測位装置10を装着したユーザーの現在位置を算出する。
通信手段18は、位置補正手段15において補正を行い算出した、測位装置10を装着したユーザーの現在位置を上位装置へ送信する。
<測位装置における動作>
次に、測位装置10における動作について説明する。
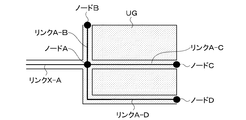
図2は、測位装置10を装着したユーザーの移動経路の例を示す地図である。同図におけるノード地点は、地図上の各経路が交差、合流、分岐する地点を示している。リンクは、各ノード地点を結ぶ経路を示している。ここで、同図に示すリンクX−Aは屋外の経路であり、網掛けの部分にあるリンクA−B,A−C,A−Dは地下街UGにおける経路を示している。本実施形態では、ユーザーがリンクX−A経路を歩行により移動してノードA地点に到達し、その後、地下街UGに下りてリンクA−C経路を移動する例について説明する。
次に、測位装置10における動作について説明する。
図2は、測位装置10を装着したユーザーの移動経路の例を示す地図である。同図におけるノード地点は、地図上の各経路が交差、合流、分岐する地点を示している。リンクは、各ノード地点を結ぶ経路を示している。ここで、同図に示すリンクX−Aは屋外の経路であり、網掛けの部分にあるリンクA−B,A−C,A−Dは地下街UGにおける経路を示している。本実施形態では、ユーザーがリンクX−A経路を歩行により移動してノードA地点に到達し、その後、地下街UGに下りてリンクA−C経路を移動する例について説明する。
図3は、測位装置10における動作例を示すフローチャートである。同図に示すフローチャートの動作は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えた図示しない制御手段により実行される。
ここで、図3のスタート時点において、測位装置10はユーザーの例えば腰辺りに装着されている。そして、ユーザーは、この測位装置10を装着して図2に示すリンクX−A経路をノードA地点へ向けて移動中の状態であるとする。
ここで、図3のスタート時点において、測位装置10はユーザーの例えば腰辺りに装着されている。そして、ユーザーは、この測位装置10を装着して図2に示すリンクX−A経路をノードA地点へ向けて移動中の状態であるとする。
先ず、測位装置10は、リファレンス測位手段11及びセンサー測位手段12により、測位装置10の現在位置の測位処理を行う(ステップS10)。ここでは、リンクX−A経路は屋外であることから、GPSを利用した測位結果が適用されている。
そして、測位装置10は、通信手段18により、GPSの測位データに対して位置補正手段15による補正の結果、即ち測位装置10を装着したユーザーの現在位置の情報を外部装置へ出力する(ステップS20)。
そして、測位装置10は、通信手段18により、GPSの測位データに対して位置補正手段15による補正の結果、即ち測位装置10を装着したユーザーの現在位置の情報を外部装置へ出力する(ステップS20)。
次に、 測位装置10は、ステップS10において測位した測位装置10の現在位置が図2に示すノードA地点に到達したか否かを判定する(ステップS30)。測位装置10の現在位置がノードA地点に到達したと判定された場合(ステップS30:Yes)は、次のステップS40へ進む。
他方、測位装置10の現在位置がノードA地点に到達していないと判定された場合(ステップS30:No)は、ステップS10に戻り、GPSによる測位を継続する。つまり、ユーザーがリンクX−A経路を移動中の間、GPSによる測位及び測位結果の出力が継続されることになる。
なお、測位装置10の現在位置がノード地点に到達したか否かの判定は、厳密にノード地点に到達したか否かを判定するのではなく、ノード地点の近辺に到達したか否かを判定することでも良い。
他方、測位装置10の現在位置がノードA地点に到達していないと判定された場合(ステップS30:No)は、ステップS10に戻り、GPSによる測位を継続する。つまり、ユーザーがリンクX−A経路を移動中の間、GPSによる測位及び測位結果の出力が継続されることになる。
なお、測位装置10の現在位置がノード地点に到達したか否かの判定は、厳密にノード地点に到達したか否かを判定するのではなく、ノード地点の近辺に到達したか否かを判定することでも良い。
次に、測位装置10は、記憶部13に記憶されている推定ゲイン情報14を取得する(ステップS40)。
図4は、ノードA地点において取得する推定ゲイン情報14の例を示す図である。同図に示す表では、各ノード地点及び各リンク経路における各測位機器(RFID、GPS、Wifi、・・・)のゲイン情報の識別と、経路情報(MAP)及び移動履歴情報の識別とが示されている。
図4は、ノードA地点において取得する推定ゲイン情報14の例を示す図である。同図に示す表では、各ノード地点及び各リンク経路における各測位機器(RFID、GPS、Wifi、・・・)のゲイン情報の識別と、経路情報(MAP)及び移動履歴情報の識別とが示されている。
各ノード地点及び各リンク経路におけるゲイン情報は、各測位機器について、位置情報信号の受信環境の信頼性評価、又はセンシング環境の信頼性評価を示している。例えば、GPSの場合、屋内などマルチパスの影響が大きい場所では信頼性評価が低下する。また、地磁気センサーの場合、金属構造物内などでは地磁気の乱れのために信頼性評価が低下する。
各ノード地点及び各リンク経路における経路情報(MAP)は、例えばノードA地点における識別M(A)では、ノードA地点から3方向に分岐している情報を含んでいる。また、移動履歴情報は、例えばノードA地点における識別R(A)では、例えばユーザーが過去にノードA地点からリンクA−Cの経路に移動したことを示す情報を履歴として保存している。この移動履歴情報は、ユーザーの現在位置を算出する際に、ユーザーが選択したリンク経路を推定する情報の一部として利用することができる。なお、ここで、移動履歴情報に対してユーザー固有の情報を重み付けして用いても良い。また、移動履歴情報として、各リンク経路での移動速度の比較が行える情報を付加して、ユーザーが選択したリンク経路を推定できるようにしても良い。
次に、測位装置10は、通信手段18により、RFIDの測位データに対して位置補正手段15による補正の結果、即ち測位装置10を装着したユーザーの現在位置の情報を外部装置へ出力する(ステップS50)。ここで、測位装置10は、ステップS40において取得した推定ゲイン情報14に基づいて、ノードA地点ではRFIDによる測位結果が最も正確で信頼性評価が高いと判断したことで、RFIDを利用した測位結果を選択している。
次に、測位装置10は、ステップS40において取得した推定ゲイン情報14に基づいて、加速度センサー、ジャイロセンサー、気圧センサー及び地磁気センサーの初期値を補正する(ステップS60)。ここでは、各種センサーに対して、推定ゲイン情報14を用いて、測位装置10についての電圧、温度、姿勢等の環境状態に応じた初期値補正を行うことになる。
次に、測位装置10は、リファレンス測位手段11及びセンサー測位手段12により、測位装置10の現在位置の測位処理を行う(ステップS70)。
そして、測位装置10は、通信手段18により、自律航法による測位データに対して位置補正手段15による補正の結果、即ち測位装置10を装着したユーザーの現在位置の情報を外部装置へ出力する(ステップS80)。
そして、測位装置10は、通信手段18により、自律航法による測位データに対して位置補正手段15による補正の結果、即ち測位装置10を装着したユーザーの現在位置の情報を外部装置へ出力する(ステップS80)。
ここで、測位装置10は、ステップS40において取得した推定ゲイン情報14に基づいて、ノードA地点では各種センサーの計測データから算出した自律航法による測位結果が最も信頼性評価が高いと判断したことで、自律航法による測位結果を選択している。更に、本実施形態では、この自律航法の結果に加えて推定ゲイン情報14の移動履歴情報を参照することで、ユーザーがリンクA−C経路をノードC地点に向けて移動中であると判断する。
次に、測位装置10は、ステップS70において測位した測位装置10の現在位置がノードC地点に到達したか否かを判定する(ステップS90)。測位装置10の現在位置がノードC地点に到達したと判定された場合(ステップS90:Yes)は、処理を終了する。その後は、ノードC地点における推定ゲイン情報14を取得して測位処理等を繰り返して行う。
ここで、ノードC地点に到達したとき、各種センサーの電圧、温度、携帯姿勢等による誤差補償演算も行われ、得られた情報は、ノードC地点からの移動位置推定に活用される。ノードC地点への接近にあたり、ノードC地点での推定ゲイン情報14を用いての各種センサーへの電力供給制御も可能となる。具体的にノードC地点では、RFID、GPS、Wifiからの位置誤差が少ないことが判るので、それらの回路、演算制御が最適化され、ノードC地点への到達時には、GPSによる測位により正確(約2m)な位置情報が得られ、リンクA−C経路で位置推測して得た位置情報、ゲイン情報の校正が可能となる。このとき、リンクA−C経路で用いた推定ゲイン情報14に対してのバックフォワードフィードバックを行い、それらの値をより最適化することができる。
他方、測位装置10の現在位置がノードC地点に到達していないと判定された場合(ステップS90:No)は、ステップS70に戻り、自律航法による測位を継続する。つまり、ユーザーがリンクA−Cの経路を移動中の間、自律航法による測位及び測位結果の出力が継続されることになる。
上記したように、本実施形態では、各ノード地点及び各リンク経路における過去の測位環境を示す推定ゲイン情報14に基づいて、外部から位置情報信号を取得する方法を選択し、且つ自律航法において利用するセンサーの種類を選択している。
これにより、例えば、GPSの場合、推定ゲイン情報14を参照することにより、地下街UGではGPSによる測位の信頼性評価が低く精度良い情報が得られないと判断できる。そして、GPSセンサー及び演算間隔を適度に制御することによって低消費電力化が実現できる。なお、ここで、地下街UGであってもIMES(Indoor Messaging System)等を用いることにより、信頼性評価が高い屋内測位を行うこともできる。
これにより、例えば、GPSの場合、推定ゲイン情報14を参照することにより、地下街UGではGPSによる測位の信頼性評価が低く精度良い情報が得られないと判断できる。そして、GPSセンサー及び演算間隔を適度に制御することによって低消費電力化が実現できる。なお、ここで、地下街UGであってもIMES(Indoor Messaging System)等を用いることにより、信頼性評価が高い屋内測位を行うこともできる。
また、Wifiについても、基地局の設置状況によって大きく変わる誤差の情報が、推定ゲイン情報14を参照することで得ることができ、Wifiを有効に活用することができる。また、このとき、Wifi信号が使えないことが推定ゲイン情報14から明確であれば、Wifi受信回路を使わないように制御することもできる。
また、地下街UGに設置されたLED照明から位置情報信号を受信できる環境である場合、LEDについての推定ゲイン情報14から信頼性評価が高い(数mの誤差)ことを示す情報が得られ、LED情報受信回路について適正な制御を行うことができる。
また、地下街UGに設置されたLED照明から位置情報信号を受信できる環境である場合、LEDについての推定ゲイン情報14から信頼性評価が高い(数mの誤差)ことを示す情報が得られ、LED情報受信回路について適正な制御を行うことができる。
また、地磁気センサー、気圧センサー等、環境による誤差が非常に大きいセンサーについても、推定ゲイン情報14を参照してその有効性を判断して活用することができる。例えば、地磁気センサーについて、推定ゲイン情報14のリンクA−C経路において通常(外乱物が少なく信頼性評価が高い)であるとの情報が得られた場合、その計測データを活用することができる。一方、気圧センサーについて、誤差大(地下街での密封状態により信頼性評価が低い)であるとの情報が得られた場合、その計測データの位置演算への寄与を少なくすることができる。
このように、各ノード地点及び各リンク経路に対応した推定ゲイン情報14を得ることで、ユーザーが位置する環境に応じた測位方法を選択することができる。これにより、様々な環境下で測位を行う際に、過去に経験した測位環境に応じて、より高い精度で測位を行うことができる。また、各センサーを最適な状況で作動させることができるので、低消費電力化が可能となり、測位装置10の小型化も実現することができる。
(変形例)
上記した測位装置10からの位置情報を、例えば、PC(Personal Computer)、PDA(Personal Digital Assistant)、電子ペーパー等の表示装置に転送することにより、位置案内の機能を備えた電子機器として適用することができる。
上記した測位装置10からの位置情報を、例えば、PC(Personal Computer)、PDA(Personal Digital Assistant)、電子ペーパー等の表示装置に転送することにより、位置案内の機能を備えた電子機器として適用することができる。
また、例えば、FeliCa(登録商標)を使用したEdy(登録商標)やSuica(登録商標)等を収容するためのカードケースに、上記の測位装置10を組み込むようにしても良い。これにより、ユーザーが、当該カードケースを例えば駅や街中等に設置されているリーダー/ライター装置にかざすことにより、位置情報信号を受信して正確な現在位置を取得することができる。また、カードケースに表示装置を備えることで位置案内用の端末装置にすることができる。
10…測位装置、11…リファレンス測位手段、12…センサー測位手段、13…記憶部、14…推定ゲイン情報、14a…経路情報、14b…測位環境情報、14c…移動履歴情報、15…位置補正手段、18…通信手段。
Claims (6)
- 位置情報信号を受信して現在位置を測位する第1の測位手段と、
自律航法により現在位置を測位する第2の測位手段と、
前記第1の測位手段及び前記第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶する記憶部と、を有し、
前記第1の測位手段及び前記第2の測位手段は、前記記憶部に記憶されている前記測位環境情報に基づいて現在位置を測位することを特徴とする測位装置。 - 前記測位環境情報は、前記第1の測位手段及び前記第2の測位手段において測位したときの経路上のノード及びリンクの少なくともいずれかにおける情報であることを特徴とする請求項1に記載の測位装置。
- 前記測位環境情報に基づいて、前記第1の測位手段及び前記第2の測位手段への電力供給を制御することを特徴とする請求項1又は2に記載の測位装置。
- 前記記憶部は、前記第1の測位手段及び前記第2の測位手段において測位したときの経路上の移動履歴を示す移動履歴情報を更に記憶し、
前記第1の測位手段及び前記第2の測位手段は、前記記憶部に記憶されている前記移動履歴情報に基づいて現在位置を測位することを特徴とする請求項1から3のいずれか一項に記載の測位装置。 - 前記第2の測位手段は、加速度センサー、角速度センサー、気圧センサー及び地磁気センサーの少なくとも1つを有することを特徴とする請求項1から4のいずれか一項に記載の測位装置。
- 位置情報信号を受信して現在位置を測位する第1の測位手段と、
自律航法により現在位置を測位する第2の測位手段と、を有し、
前記第1の測位手段及び前記第2の測位手段において測位したときの測位環境を示す測位環境情報を記憶し、
前記第1の測位手段及び前記第2の測位手段は、前記記憶されている前記測位環境情報に基づいて現在位置を測位することを特徴とする測位方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009256785A JP2011102707A (ja) | 2009-11-10 | 2009-11-10 | 測位装置及び測位方法 |
| US12/942,935 US8566019B2 (en) | 2009-11-10 | 2010-11-09 | Positioning apparatus and positioning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009256785A JP2011102707A (ja) | 2009-11-10 | 2009-11-10 | 測位装置及び測位方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010216619A Division JP2011102792A (ja) | 2010-09-28 | 2010-09-28 | 測位装置及び測位方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011102707A true JP2011102707A (ja) | 2011-05-26 |
| JP2011102707A5 JP2011102707A5 (ja) | 2011-11-04 |
Family
ID=43974809
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009256785A Withdrawn JP2011102707A (ja) | 2009-11-10 | 2009-11-10 | 測位装置及び測位方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8566019B2 (ja) |
| JP (1) | JP2011102707A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150094434A (ko) * | 2014-02-11 | 2015-08-19 | 한국전자통신연구원 | 와이-파이 위치와 센서정보 결합을 통한 단말 위치 필터링 시스템 및 그 방법 |
| JP2017194969A (ja) * | 2017-04-27 | 2017-10-26 | 株式会社メガチップス | 拡張現実システム、プログラムおよび拡張現実提供方法 |
| WO2022240013A1 (ko) * | 2021-05-13 | 2022-11-17 | 한국철도기술연구원 | 관성 데이터 및 무선신호 데이터 기반 실내 측위 방법 및 장치 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103189757B (zh) * | 2011-10-31 | 2015-12-09 | 松下电器(美国)知识产权公司 | 位置推测装置、位置推测方法、程序以及集成电路 |
| JP6012204B2 (ja) * | 2012-03-06 | 2016-10-25 | 株式会社メガチップス | 測位システム、端末装置、プログラムおよび測位方法 |
| JP5870817B2 (ja) * | 2012-03-30 | 2016-03-01 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| KR101887422B1 (ko) * | 2012-11-19 | 2018-09-10 | 삼성전자주식회사 | 설정된 디바이스의 위치정보를 디스플레이하는 전자 장치 및 방법 |
| JP6268945B2 (ja) * | 2013-02-04 | 2018-01-31 | 株式会社リコー | 慣性装置、方法及びプログラム |
| JP2015111096A (ja) * | 2013-10-28 | 2015-06-18 | 株式会社リコー | 方位推定装置、方位推定システム、方位推定方法およびプログラム |
| CN104536567B (zh) * | 2014-12-23 | 2018-03-13 | 深圳市金立通信设备有限公司 | 一种方向检测方法 |
| CN104596510A (zh) * | 2014-12-23 | 2015-05-06 | 深圳市金立通信设备有限公司 | 一种终端 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6366413A (ja) * | 1986-09-09 | 1988-03-25 | Nissan Motor Co Ltd | 車両用経路案内装置 |
| JPH0989584A (ja) * | 1995-09-26 | 1997-04-04 | Honda Motor Co Ltd | 携帯用ナビゲーション装置 |
| JPH1183532A (ja) * | 1997-09-10 | 1999-03-26 | Hitachi Cable Ltd | ロケーションシステム |
| JPH11325927A (ja) * | 1998-05-18 | 1999-11-26 | Fujitsu Ten Ltd | ナビゲーション装置の測位方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02216011A (ja) | 1989-02-15 | 1990-08-28 | Matsushita Electric Works Ltd | 歩行用ロケーション装置 |
| JP3200747B2 (ja) | 1991-12-24 | 2001-08-20 | カシオ計算機株式会社 | 行程検出装置及び行程検出方法 |
| JPH0868643A (ja) | 1994-08-26 | 1996-03-12 | Alpine Electron Inc | 携帯用ナビゲーション装置 |
| JP4427517B2 (ja) | 2006-02-14 | 2010-03-10 | 株式会社東芝 | 歩行者動線観測装置、方法およびプログラム |
| US7940194B2 (en) * | 2006-03-07 | 2011-05-10 | Pioneer Corporation | Position registration device, route search device, position registration method, position registration program, and recording medium |
-
2009
- 2009-11-10 JP JP2009256785A patent/JP2011102707A/ja not_active Withdrawn
-
2010
- 2010-11-09 US US12/942,935 patent/US8566019B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6366413A (ja) * | 1986-09-09 | 1988-03-25 | Nissan Motor Co Ltd | 車両用経路案内装置 |
| JPH0989584A (ja) * | 1995-09-26 | 1997-04-04 | Honda Motor Co Ltd | 携帯用ナビゲーション装置 |
| JPH1183532A (ja) * | 1997-09-10 | 1999-03-26 | Hitachi Cable Ltd | ロケーションシステム |
| JPH11325927A (ja) * | 1998-05-18 | 1999-11-26 | Fujitsu Ten Ltd | ナビゲーション装置の測位方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150094434A (ko) * | 2014-02-11 | 2015-08-19 | 한국전자통신연구원 | 와이-파이 위치와 센서정보 결합을 통한 단말 위치 필터링 시스템 및 그 방법 |
| KR102034527B1 (ko) * | 2014-02-11 | 2019-10-21 | 한국전자통신연구원 | 와이-파이 위치와 센서정보 결합을 통한 단말 위치 필터링 시스템 및 그 방법 |
| JP2017194969A (ja) * | 2017-04-27 | 2017-10-26 | 株式会社メガチップス | 拡張現実システム、プログラムおよび拡張現実提供方法 |
| WO2022240013A1 (ko) * | 2021-05-13 | 2022-11-17 | 한국철도기술연구원 | 관성 데이터 및 무선신호 데이터 기반 실내 측위 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110112752A1 (en) | 2011-05-12 |
| US8566019B2 (en) | 2013-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011102707A (ja) | 測位装置及び測位方法 | |
| Ban et al. | Indoor positioning method integrating pedestrian Dead Reckoning with magnetic field and WiFi fingerprints | |
| US8965684B2 (en) | Mobile terminal, system and method | |
| KR101728123B1 (ko) | 지구 자기장을 이용한 동시 로컬리제이션 및 매핑 | |
| US10499198B2 (en) | Positioning device and positioning system | |
| US8886452B2 (en) | Mobile terminal, system and method | |
| KR102035771B1 (ko) | 휴대용 단말기에서 위치 정보를 보상하기 위한 장치 및 방법 | |
| US9378558B2 (en) | Self-position and self-orientation based on externally received position information, sensor data, and markers | |
| TWI626857B (zh) | 無線定位系統 | |
| US10530498B2 (en) | Transmission device and transmission method, reception device and reception method, and program | |
| JP5202613B2 (ja) | 移動端末、システム及び方法 | |
| JP2011102792A (ja) | 測位装置及び測位方法 | |
| CN104950284A (zh) | 装置相对位置的判定方法及电子装置 | |
| CN103376107A (zh) | 位置信息提供系统、导航系统以及终端装置 | |
| CN112041635A (zh) | 移动机、地图管理装置以及定位系统 | |
| KR20160092611A (ko) | 단일 단말기를 이용한 비콘 위치 탐색 방법 및 그 장치 | |
| US20130210459A1 (en) | Mobile terminal, system and method | |
| US20190265037A1 (en) | Position measurement apparatus, position correction method, and position information acquisition system | |
| JP2016206017A (ja) | 電子機器、及び移動速度算出プログラム | |
| KR101161103B1 (ko) | 사용자 위치 추적 방법, 이를 이용한 평면도 제작 방법 및 장치 | |
| Kuusniemi et al. | Multi-sensor multi-network seamless positioning with visual aiding | |
| KR101140045B1 (ko) | 사용자 위치 추적 방법 및 장치 | |
| JP5203411B2 (ja) | 携帯型地図表示装置及びその表示制御方法 | |
| KR101614549B1 (ko) | 근거리 무선 랜 통신을 통해 네비게이션 기능을 수행하는 무선 통신 단말기 및 그 제어방법 | |
| Zhuang et al. | Design and evaluation of an improved integration of WiFi fingerprinting and MEMS sensors in smartphones |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110914 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120124 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20120322 |