JP2010503096A - 工作機械監視装置 - Google Patents
工作機械監視装置 Download PDFInfo
- Publication number
- JP2010503096A JP2010503096A JP2009527129A JP2009527129A JP2010503096A JP 2010503096 A JP2010503096 A JP 2010503096A JP 2009527129 A JP2009527129 A JP 2009527129A JP 2009527129 A JP2009527129 A JP 2009527129A JP 2010503096 A JP2010503096 A JP 2010503096A
- Authority
- JP
- Japan
- Prior art keywords
- machine tool
- monitoring device
- identification unit
- workpiece
- distance parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/148—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using capacitive technology
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D59/00—Accessories specially designed for sawing machines or sawing devices
- B23D59/001—Measuring or control devices, e.g. for automatic control of work feed pressure on band saw blade
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q11/00—Accessories fitted to machine tools for keeping tools or parts of the machine in good working condition or for cooling work; Safety devices specially combined with or arranged in, or specially adapted for use in connection with, machine tools
- B23Q11/0078—Safety devices protecting the operator, e.g. against accident or noise
- B23Q11/0082—Safety devices protecting the operator, e.g. against accident or noise by determining whether the operator is in a dangerous position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/24—Arrangements for observing, indicating or measuring on machine tools using optics or electromagnetic waves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/24—Arrangements for observing, indicating or measuring on machine tools using optics or electromagnetic waves
- B23Q17/2433—Detection of presence or absence
- B23Q17/2438—Detection of presence or absence of an operator or a part thereof
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/141—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using sound propagation, e.g. sonar
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/142—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using image capturing devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/144—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using light grids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
- F16P3/147—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact using electro-magnetic technology, e.g. tags or radar
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T83/00—Cutting
- Y10T83/081—With randomly actuated stopping means
Abstract
Description
本発明は工作機械の使用状況を識別するための識別ユニットを備えた工作機械監視装置から出発している。この使用状況は被加工物の特に想定外若しくは予想外の特性、例えば処理作業中の被加工物の"バウンド"などを含み得る。その場合にはいわゆる"キックバック"に基づいて負傷するおそれもある。
Claims (25)
- 工作機械(10;116)における使用状況識別のための識別ユニット(24)を備えた工作機械監視装置において、
前記識別ユニット(24)が少なくとも1つの間隔距離パラメータ(42,44,46,82,98;114)に基づいて使用状況を識別するように構成されていることを特徴とする工作機械監視装置。 - 前記識別ユニット(24)は、使用状況を間隔距離パラメータ(42,44,46,82,98;114.1−114.6)のセットに基づいて識別できるようにするために設けられている、請求項1記載の工作機械監視装置。
- 前記識別ユニット(24)は、少なくとも1つの間隔距離パラメータ(42,44,46,82;114.1−114.6)の検出のための少なくとも2つのセンサ手段(28,30,32,58,60,62,78;112.1−112.6)を有している、請求項1または2記載の工作機械監視装置。
- 前記識別ユニット(24)は、少なくとも1つの間隔距離パラメータ(114.2,114.4,114.6)の検出のための少なくとも2つのセンサ手段(112.2,112.4,114.6)を有し、この場合前記センサ手段(112.2,112.4,114.6)によって確定される監視領域(115.2,115.4,115.6)が工作機械(10;116)の搬送手段(108;124)に沿って配置される、請求項3記載の工作機械監視装置。
- 前記識別ユニット(24)は、少なくとも1つの間隔距離パラメータ(114,1,114.2)の検出のための少なくとも2つのセンサ手段(112.1,112.2)を有し、前記センサ手段は工作機械(10)の分離面(102)の両側に配設されている、請求項3記載の工作機械監視装置。
- 前記識別ユニット(24)は、使用状況を間隔距離パラメータ(42,44,46,82)間の差分に基づいて識別できるようにするために設けられている、請求項1から5いずれか1項記載の工作機械監視装置。
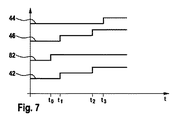
- 前記識別ユニット(24)は、使用状況を間隔距離パラメータ(42,44,46,82,98;114.1−114.6)の時間的変化に基づいて識別できるようにするために設けられている、請求項1から6いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、少なくとも1つの間隔距離パラメータ(114.2)の時間的変化のもとで間隔距離パラメータ(114.2)の変化値を段階付けできるようにするために設けられている、請求項7記載の工作機械監視装置。
- 前記識別ユニット(24)は、被加工物(106;120)の予期せぬ動きを識別できるようにするために設けられている、請求項1から8いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、検出された少なくとも1つの間隔距離パラメータ(114.2,114.4,114.6)に基づいて、被加工物の搬送方向(108)とは反対方向の被加工物(106)の逆行運動を識別できるようにするために設けられている、請求項1から9いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、検出された少なくとも1つの間隔距離パラメータ(114.1,114.3,114.5)に基づいて、工作機械の搬送方向(124)とは反対方向の工作機械(116)の逆行運動を識別できるようにするために設けられている、請求項1から9いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、検出された少なくとも1つの間隔距離パラメータ(114.2,114.4,114.6;114.1,114.3,114.5)に基づいて、被加工物(106)及び/又は工作機械部材(117)の、被加工物加工面(104;122)に相対的な離昇運動を識別できるようにするために設けられている、請求項1から9いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、間隔距離パラメータ(114)の識別のための少なくとも1つのセンサ手段(112)を有し、該センサ手段(112)は超広帯域な作動モードに対して設けられている、請求項1から12いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、工作機械(10)の使用プロセス監視のために少なくとも2つの監視領域(48,50,52,74,76)を確定する、請求項1から13いずれか1項記載の工作機械監視装置。
- 前記監視領域(74,76)に工作機械(10)の様々なそれぞれ1つの作動モードが対応付けられている、請求項14記載の工作機械監視装置。
- 前記監視領域の少なくとも1つ(74)に工作機械(10)の警報モードが対応付けられている、請求項14記載の工作機械監視装置。
- 前記識別ユニット(24)は、警報モードにおいて工具の駆動を遅くさせるべく、工具(18)の駆動のための工作機械駆動ユニット(20)と協働するように構成されている、請求項16記載の工作機械監視装置。
- 監視領域(76)の少なくとも1つに、工作機械(10)の駆動領域から駆動している工具(18)を取り除くことが割当てられている、請求項14から17いずれか1項記載の工作機械監視装置。
- 監視領域(76)の少なくとも1つに、工作機械(10)の安全のための遮断が割当てられている、請求項14から18いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は計算ユニット(56)を含んでおり、該計算ユニット(56)はファジー論理及び/又はニューロン論理に基づく間隔距離パラメータ(42,44,46,82)の評価によって適用状況が識別できるように構成されている、請求項1から19いずれか1項記載の工作機械監視装置。
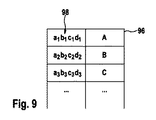
- 前記識別ユニット(24)はデータバンク(96)を有しており、該データバンクにおいては間隔距離パラメータ(98)のセットに適用状況が対応付けられている、請求項1から20いずれか1項記載の工作機械監視装置。
- 前記識別ユニット(24)は、人体の一部の存在が監視領域(48,50,52,74,76)において少なくとも1つの間隔距離パラメータ(42,44,46,82,98)の評価によって識別できるように構成されている、請求項1から21いずれか1項記載の工作機械監視装置。
- 安全手段の実施のために前記識別ユニット(24)と作用的に接続されたアクチュエータユニット(81)が設けられている、請求項1から22いずれか1項記載の工作機械監視装置。
- 請求項1から23いずれか1項記載の工作機械監視装置(22)を備えていることを特徴とする工作機械。
- 工作機械(10;116)の適用プロセスにおける適用状況の識別のための方法において、
適用状況の識別のために、少なくとも1つの間隔距離パラメータ(42,44,46,82,98;114)が検出されることを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006041755 | 2006-09-04 | ||
| DE102007041097A DE102007041097A1 (de) | 2006-09-04 | 2007-08-30 | Werkzeugmaschinenüberwachungsvorrichtung |
| PCT/EP2007/059246 WO2008028911A1 (de) | 2006-09-04 | 2007-09-04 | Werkzeugmaschinenüberwachungsvorrichtung |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010503096A true JP2010503096A (ja) | 2010-01-28 |
Family
ID=38719719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009527129A Pending JP2010503096A (ja) | 2006-09-04 | 2007-09-04 | 工作機械監視装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8615320B2 (ja) |
| EP (1) | EP2076357B1 (ja) |
| JP (1) | JP2010503096A (ja) |
| AT (1) | ATE522320T1 (ja) |
| DE (1) | DE102007041097A1 (ja) |
| RU (1) | RU2459138C2 (ja) |
| WO (1) | WO2008028911A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011524263A (ja) * | 2008-06-18 | 2011-09-01 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 工作機械監視装置 |
| JP2013071194A (ja) * | 2011-09-27 | 2013-04-22 | Hitachi Koki Co Ltd | 切断機及びモータの緊急停止方法 |
| JP2014501179A (ja) * | 2010-12-16 | 2014-01-20 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 操作装置用の安全装置の動作方法、操作装置用の安全装置および操作装置 |
| JP2020529928A (ja) * | 2017-07-24 | 2020-10-15 | フェストール・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 電動工具、および、電動工具のキックバック−現象を認識するための方法 |
| JP2020535026A (ja) * | 2017-09-29 | 2020-12-03 | フェスツール ゲーエムベーハー | 可搬型工作機械 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6922153B2 (en) * | 2003-05-13 | 2005-07-26 | Credo Technology Corporation | Safety detection and protection system for power tools |
| DE102007044804A1 (de) * | 2007-09-20 | 2009-04-09 | Robert Bosch Gmbh | Werkzeugmaschinensicherheitsvorrichtung |
| DE102008001727A1 (de) * | 2008-05-13 | 2009-11-19 | Robert Bosch Gmbh | Werkzeugmaschine |
| DE102010054855B4 (de) * | 2010-12-17 | 2015-06-11 | Deckel Maho Pfronten Gmbh | Werkzeugmaschine, insbesondere programmgesteuerte Fräs- und Bohrmaschine |
| US10222781B2 (en) | 2010-12-17 | 2019-03-05 | Deckel Maho Pfronten Gmbh | Apparatus for monitoring and providing visual representations of the operating conditions of machine tool parameters |
| CN102407461B (zh) * | 2011-08-03 | 2013-04-24 | 杭州电子科技大学 | 一种金属带锯床全程线速度实时检测装置 |
| CN106132649B (zh) * | 2013-11-18 | 2019-11-19 | 罗伯特·博世有限公司 | 带有电容性伤害缓解系统的动力工具 |
| RU2548973C1 (ru) * | 2013-11-22 | 2015-04-20 | Федеральное государственное автономное образовательное учреждение высшего профессионального образования "Санкт-Петербургский государственный университет аэрокосмического приборостроения" | Устройство для моделирования гравитационного тягача при борьбе с астероидной опасностью |
| CN105829792B (zh) * | 2013-12-24 | 2019-10-11 | 罗伯特·博世有限公司 | 具有用于感测器具与物体之间的接触的超声波传感器的电动工具 |
| DE102014210612A1 (de) * | 2014-06-04 | 2015-12-17 | Holzma Plattenaufteiltechnik Gmbh | Verfahren zum Betreiben einerPlattenbearbeitungsanlage, sowiePlattenbearbeitungsanlage |
| US9810524B2 (en) | 2015-12-15 | 2017-11-07 | Sears Brands, L.L.C. | Power tool with optical measurement device |
| NZ748481A (en) * | 2016-05-12 | 2019-10-25 | Kando Innovation Ltd | Enhanced safety attachment for cutting machine |
| CN106863360A (zh) * | 2017-03-31 | 2017-06-20 | 上汽通用五菱汽车股份有限公司 | 一种曲轴机械手工件类型识别方法 |
| US10906110B2 (en) | 2017-04-28 | 2021-02-02 | Transform Sr Brands Llc | Power tool with integrated measurement device and associated methods |
| EP3488984A1 (en) * | 2017-11-24 | 2019-05-29 | SCM Group S.p.A. | Machine for working workpieces, made of wood and the like, provided with a system for detecting the presence of an operator, and operation method thereof |
| DE102018216933A1 (de) * | 2018-10-02 | 2020-04-02 | Festool Gmbh | Elektrowerkzeug |
| DE102018127518A1 (de) * | 2018-11-05 | 2020-05-07 | Advanced Realtime Tracking Gmbh | Vorrichtung und Verfahren zur Bearbeitung mindestens eines Arbeitsbereiches mit einem Bearbeitungswerkzeug |
| CN111553179B (zh) * | 2019-02-12 | 2023-05-05 | 阿里巴巴集团控股有限公司 | 服装质检状态、动作状态确定方法和装置以及电子设备 |
| IT201900004211A1 (it) * | 2019-03-22 | 2020-09-22 | Comacchio S R L | Sistema di sicurezza per organi di lavoro di macchine di perforazione o di lavorazione in genere, e metodo di funzionamento di detto sistema di sicurezza |
| TWI751434B (zh) * | 2019-08-22 | 2022-01-01 | 邱智煇 | 工具機 |
| DE102020207520A1 (de) * | 2019-09-02 | 2021-03-04 | Robert Bosch Gesellschaft mit beschränkter Haftung | Werkzeugmaschinenvorrichtung |
| WO2021127104A1 (en) * | 2019-12-20 | 2021-06-24 | Milwaukee Electric Tool Corporation | Reciprocating saw |
| DE202021100243U1 (de) | 2021-01-19 | 2022-04-20 | Altendorf Gmbh | Formatkreissäge mit Sicherheitseinrichtung zur Vermeidung von Schnittverletzungen |
| CN114433658A (zh) * | 2022-02-15 | 2022-05-06 | 苏州三姆森光电科技有限公司 | 一种平面度整形机床及整形方法 |
| CN114833611B (zh) * | 2022-07-04 | 2022-09-30 | 广东原点智能技术有限公司 | 可识别工件型号的夹具及数控机床 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004160822A (ja) * | 2002-11-12 | 2004-06-10 | Makita Corp | 電動工具 |
| JP2006511770A (ja) * | 2002-12-23 | 2006-04-06 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 接触保護のための装置及び可動部材の接触前に保護するための方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1208396A1 (ru) * | 1984-06-04 | 1986-01-30 | Андроповский авиационный технологический институт | Защитное устройство рабочей зоны |
| US5212645A (en) * | 1990-07-19 | 1993-05-18 | General Electric Company | Flexible real-time, multi-tasking architecture for tool condition monitoring |
| JP3100406B2 (ja) * | 1991-03-06 | 2000-10-16 | ジヤトコ・トランステクノロジー株式会社 | 工作機械の故障予知装置 |
| US6041271A (en) * | 1991-10-10 | 2000-03-21 | Finn-Power International, Inc. | Apparatus to determine the operational effectiveness of a machine tool and method therefor |
| CA2095398C (en) * | 1993-05-03 | 2001-06-12 | Kalyan Ghosh | System for detecting human presence in hazardous situations |
| JP3025421B2 (ja) * | 1995-06-14 | 2000-03-27 | 三菱電機株式会社 | 制御システムの異常検知装置 |
| EP1061487A1 (en) * | 1999-06-17 | 2000-12-20 | Istituto Trentino Di Cultura | A method and device for automatically controlling a region in space |
| US6604013B1 (en) * | 2000-10-11 | 2003-08-05 | Ford Motor Company | Tool failure detection utilizing frequency derived, pre-characterization templates |
| CA2448479C (en) | 2002-11-12 | 2009-05-05 | Makita Corporation | Power tools |
| JP2005088248A (ja) * | 2003-09-12 | 2005-04-07 | Makita Corp | 動力工具 |
| JP4359573B2 (ja) * | 2005-03-31 | 2009-11-04 | オークマ株式会社 | 工作機械の熱変位補正方法 |
| US20090199610A1 (en) * | 2005-04-06 | 2009-08-13 | Kikuchi Seisakusho Co., Ltd. | Actuator, parallel link mechanism using the same, and long material bending device |
-
2007
- 2007-08-30 DE DE102007041097A patent/DE102007041097A1/de not_active Withdrawn
- 2007-09-04 RU RU2009112163/02A patent/RU2459138C2/ru not_active IP Right Cessation
- 2007-09-04 WO PCT/EP2007/059246 patent/WO2008028911A1/de active Application Filing
- 2007-09-04 JP JP2009527129A patent/JP2010503096A/ja active Pending
- 2007-09-04 AT AT07803210T patent/ATE522320T1/de active
- 2007-09-04 US US12/439,781 patent/US8615320B2/en active Active
- 2007-09-04 EP EP07803210A patent/EP2076357B1/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004160822A (ja) * | 2002-11-12 | 2004-06-10 | Makita Corp | 電動工具 |
| JP2006511770A (ja) * | 2002-12-23 | 2006-04-06 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 接触保護のための装置及び可動部材の接触前に保護するための方法 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011524263A (ja) * | 2008-06-18 | 2011-09-01 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 工作機械監視装置 |
| JP2014501179A (ja) * | 2010-12-16 | 2014-01-20 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 操作装置用の安全装置の動作方法、操作装置用の安全装置および操作装置 |
| US9296106B2 (en) | 2010-12-16 | 2016-03-29 | Robert Bosch Gmbh | Method for operating a safety device for a handling device, safety device for a handling device, and handling device |
| JP2013071194A (ja) * | 2011-09-27 | 2013-04-22 | Hitachi Koki Co Ltd | 切断機及びモータの緊急停止方法 |
| JP2020529928A (ja) * | 2017-07-24 | 2020-10-15 | フェストール・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 電動工具、および、電動工具のキックバック−現象を認識するための方法 |
| JP7050897B2 (ja) | 2017-07-24 | 2022-04-08 | フェストール・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 電動工具、および、電動工具のキックバック現象を認識するための方法 |
| US11491564B2 (en) | 2017-07-24 | 2022-11-08 | Festool Gmbh | Power tool, system, and method |
| US11701723B2 (en) | 2017-07-24 | 2023-07-18 | Festool Gmbh | Power tool, system, and method |
| JP2020535026A (ja) * | 2017-09-29 | 2020-12-03 | フェスツール ゲーエムベーハー | 可搬型工作機械 |
| US11426808B2 (en) | 2017-09-29 | 2022-08-30 | Festool Gmbh | Mobile machine tool |
| JP7354095B2 (ja) | 2017-09-29 | 2023-10-02 | フェスツール ゲーエムベーハー | 可搬型工作機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100152882A1 (en) | 2010-06-17 |
| EP2076357B1 (de) | 2011-08-31 |
| WO2008028911A1 (de) | 2008-03-13 |
| RU2459138C2 (ru) | 2012-08-20 |
| US8615320B2 (en) | 2013-12-24 |
| DE102007041097A1 (de) | 2008-03-06 |
| ATE522320T1 (de) | 2011-09-15 |
| EP2076357A1 (de) | 2009-07-08 |
| RU2009112163A (ru) | 2010-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010503096A (ja) | 工作機械監視装置 | |
| US8051759B2 (en) | Motion detecting system for use in a safety system for power equipment | |
| JP4031042B2 (ja) | 可動部品に取り付けるための光学的装置 | |
| EP3548792B1 (en) | Monitoring device for monitoring a boundary section of a safety zone | |
| EP1442834B1 (en) | Machine safety protection system | |
| US20150049911A1 (en) | Method and device for safeguarding a hazardous working area of an automated machine | |
| US20040181951A1 (en) | Chain saw safety system | |
| AU2017210492B2 (en) | Power tool with capacitive injury mitigation system | |
| US20190001504A1 (en) | Method For Detecting A Collision Of A Robot Arm With An Object, And A Robot With A Robot Arm | |
| JP2003222295A (ja) | 機械の保安関連機能を制御する方法及び装置 | |
| JPH09168980A (ja) | 携帯用工具機械の動作遮断方法及びその装置 | |
| CN110869178A (zh) | 手持式圆锯 | |
| CN101512211B (zh) | 机床监控装置 | |
| US20190234559A1 (en) | Method and system to monitor and shut down saw | |
| CN101511531A (zh) | 机床监测装置 | |
| EP3473387A1 (en) | Robot supervision system | |
| WO2019232142A1 (en) | Method and system to control, automate, monitor, and shut down a deli slicer | |
| CN110270717A (zh) | 电动切割工具 | |
| WO2018024889A1 (en) | Blade guard having a safety feature | |
| CN117697180A (zh) | 一种具有预防人身伤害的激光切割系统及方法 | |
| KR20200015352A (ko) | 대상물, 특히 공구 장치의 공구를 감시하고 및/또는 대상물, 특히 공구 또는 가공물을 기계적으로 스캐닝하기 위한 장치 및 방법 및 이와 같은 장치의 구동 및/또는 이와 같은 방법의 수행을 위한 컴퓨터 프로그램 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120419 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120718 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120725 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121015 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130306 |