JP2010101231A - 内燃機関の出力制御装置 - Google Patents
内燃機関の出力制御装置 Download PDFInfo
- Publication number
- JP2010101231A JP2010101231A JP2008272725A JP2008272725A JP2010101231A JP 2010101231 A JP2010101231 A JP 2010101231A JP 2008272725 A JP2008272725 A JP 2008272725A JP 2008272725 A JP2008272725 A JP 2008272725A JP 2010101231 A JP2010101231 A JP 2010101231A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- upper limit
- limit value
- internal combustion
- combustion engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【解決手段】出力制御装置ECU2は、内燃機関3の運転状態に応じて、要求トルクTRQ_REQが算出されるとともに、算出された要求トルクTRQ_REQを制限するために、上限値TRQ_LMTが設定される。また、内燃機関3が加速状態にあると判定されたときに、ギヤ段NGRに応じて、上限値TRQ_LMTの増大時間T_CHGを設定し、設定された増大時間T_CHGにおいて、上限値TRQ_LMTをより大きな加速時上限値TRQ_LMTに設定することにより、要求トルクTRQ_REQの制限が緩和され、良好な加速感が得られ、ドライバビリティを向上させることができる。
【選択図】図3
Description

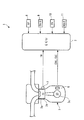
2 ECU(運転状態検出手段、要求トルク算出手段、上限値設定手段、変速比検出手段、加速判定手段、増大期間設定手段、加速時上限値設定手段)
3 エンジン(内燃機関)
6 クランク角センサ(運転状態検出手段、変速比検出手段)
8 アクセル開度センサ(運転状態検出手段)
11 出力軸回転数センサ(変速比検出手段)
TRQ_REQ 要求トルク
NE エンジン回転数
AP アクセル開度
TRQ_LMTBASE 基本上限値(上限値)
NGR ギヤ段(変速比)
T_CHG 増大時間
TRQ_LMT 上限値(加速時上限値)
Claims (3)
- 変速機に接続され、要求トルクに基づいて内燃機関の出力を制御する内燃機関の出力制御装置であって、
前記内燃機関の運転状態を検出する運転状態検出手段と、
当該検出された内燃機関の運転状態に応じて、前記要求トルクを算出する要求トルク算出手段と、
当該算出された要求トルクを制限するための上限値を設定する上限値設定手段と、
前記変速機の変速比を検出する変速比検出手段と、
前記内燃機関が加速状態にあるか否かを判定する加速判定手段と、
当該加速判定手段により、前記内燃機関が加速状態にあると判定されたときに、前記検出された変速比に応じて、前記上限値の増大期間を設定する増大期間設定手段と、
当該設定された増大期間において、前記上限値をより大きな加速時上限値に設定する加速時上限値設定手段と、
を備えることを特徴とする内燃機関の出力制御装置。 - 前記増大期間設定手段は、前記変速比が小さいほど、前記増大期間をより大きな値に設定することを特徴とする、請求項1に記載の内燃機関の出力制御装置。
- 前記加速時上限値設定手段は、前記増大期間の経過後、前記加速時上限値を前記上限値に復帰させるときに、前記加速時上限値を前記変速比に応じた速度で徐々に減少させることを特徴とする、請求項1に記載の内燃機関の出力制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008272725A JP5058124B2 (ja) | 2008-10-23 | 2008-10-23 | 内燃機関の出力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008272725A JP5058124B2 (ja) | 2008-10-23 | 2008-10-23 | 内燃機関の出力制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010101231A true JP2010101231A (ja) | 2010-05-06 |
| JP5058124B2 JP5058124B2 (ja) | 2012-10-24 |
Family
ID=42292091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008272725A Expired - Fee Related JP5058124B2 (ja) | 2008-10-23 | 2008-10-23 | 内燃機関の出力制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5058124B2 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1089129A (ja) * | 1996-09-18 | 1998-04-07 | Toyota Motor Corp | 燃料噴射装置 |
| JPH10339177A (ja) * | 1997-06-11 | 1998-12-22 | Honda Motor Co Ltd | 車両用エンジンの制御装置 |
| JPH11101142A (ja) * | 1997-09-26 | 1999-04-13 | Mitsubishi Motors Corp | 車両用出力トルク制御装置 |
| JP2000027684A (ja) * | 1998-07-09 | 2000-01-25 | Mitsubishi Motors Corp | エンジンの燃料噴射制御装置 |
| JP2000303893A (ja) * | 1999-04-26 | 2000-10-31 | Mitsubishi Motors Corp | 内燃機関のトルク制御装置 |
| JP2005083373A (ja) * | 2003-09-09 | 2005-03-31 | Hyundai Motor Co Ltd | 内燃機関のトルク制御方法 |
| JP2006170116A (ja) * | 2004-12-17 | 2006-06-29 | Nissan Motor Co Ltd | 原動機トルク制御装置 |
| JP2007263093A (ja) * | 2006-03-30 | 2007-10-11 | Toyota Motor Corp | 内燃機関のトルク制御装置 |
-
2008
- 2008-10-23 JP JP2008272725A patent/JP5058124B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1089129A (ja) * | 1996-09-18 | 1998-04-07 | Toyota Motor Corp | 燃料噴射装置 |
| JPH10339177A (ja) * | 1997-06-11 | 1998-12-22 | Honda Motor Co Ltd | 車両用エンジンの制御装置 |
| JPH11101142A (ja) * | 1997-09-26 | 1999-04-13 | Mitsubishi Motors Corp | 車両用出力トルク制御装置 |
| JP2000027684A (ja) * | 1998-07-09 | 2000-01-25 | Mitsubishi Motors Corp | エンジンの燃料噴射制御装置 |
| JP2000303893A (ja) * | 1999-04-26 | 2000-10-31 | Mitsubishi Motors Corp | 内燃機関のトルク制御装置 |
| JP2005083373A (ja) * | 2003-09-09 | 2005-03-31 | Hyundai Motor Co Ltd | 内燃機関のトルク制御方法 |
| JP2006170116A (ja) * | 2004-12-17 | 2006-06-29 | Nissan Motor Co Ltd | 原動機トルク制御装置 |
| JP2007263093A (ja) * | 2006-03-30 | 2007-10-11 | Toyota Motor Corp | 内燃機関のトルク制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5058124B2 (ja) | 2012-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007224727A (ja) | 内燃機関の制御装置 | |
| JP2002276447A (ja) | 内燃機関の制御装置 | |
| JP2004150424A (ja) | 内燃機関の制御装置 | |
| JP2007192082A (ja) | 車両に搭載された内燃機関の推定トルク算出装置 | |
| EP2096285A2 (en) | Torque calculation method for engine | |
| JP4799654B2 (ja) | 内燃機関の発電制御装置 | |
| JP2010185433A (ja) | 内燃機関の触媒暖機制御装置 | |
| JP2009167889A (ja) | 内燃機関の制御方法 | |
| JP5058124B2 (ja) | 内燃機関の出力制御装置 | |
| US6769401B2 (en) | Power output control system for internal combustion engine | |
| JP2010185425A (ja) | 内燃機関の制御装置 | |
| JP5071349B2 (ja) | クラッチ機構付き車両の制御装置 | |
| JP4120614B2 (ja) | 内燃機関の始動制御装置 | |
| JP5141673B2 (ja) | 内燃機関のアイドルストップ制御装置 | |
| JP2010264817A (ja) | ハイブリッド車両の制御装置 | |
| JP2004183615A (ja) | 内燃機関の制御装置 | |
| JP2011157948A (ja) | 燃料噴射制御装置 | |
| JP4788277B2 (ja) | 自動車用内燃機関の制御装置 | |
| JP4738473B2 (ja) | 内燃機関のトルク制御装置 | |
| JP6153342B2 (ja) | 内燃機関の制御装置 | |
| JP2018189023A (ja) | 車両の制御装置 | |
| JP5400672B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4216309B2 (ja) | 内燃機関の制御装置 | |
| JP2009216037A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP5047012B2 (ja) | 内燃機関の燃料噴射制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120731 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5058124 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |