JP2010083305A - シート装置 - Google Patents
シート装置 Download PDFInfo
- Publication number
- JP2010083305A JP2010083305A JP2008253892A JP2008253892A JP2010083305A JP 2010083305 A JP2010083305 A JP 2010083305A JP 2008253892 A JP2008253892 A JP 2008253892A JP 2008253892 A JP2008253892 A JP 2008253892A JP 2010083305 A JP2010083305 A JP 2010083305A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- seat
- angle
- seat cushion
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005489 elastic deformation Effects 0.000 claims abstract description 21
- 238000001514 detection method Methods 0.000 claims abstract description 14
- 230000007246 mechanism Effects 0.000 claims description 26
- 230000000630 rising effect Effects 0.000 abstract 1
- 238000000034 method Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 19
- 230000009467 reduction Effects 0.000 description 7
- 230000004044 response Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009532 heart rate measurement Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
Images







Landscapes
- Seats For Vehicles (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
Abstract
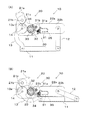
【解決手段】シートクッション22とモータ31のピニオンギヤ31bとの間にスパイラルスプリング34が介在されており、このスパイラルスプリング34は、ピニオンギヤ31bの前傾回動方向の回動に応じた弾性変形によりシートバック21をシートクッション22に対して前傾方向に付勢し、ピニオンギヤ31bの起立回動方向の回動に応じた弾性変形によりシートバック21をシートクッション22に対して起立方向に付勢する。そして、駆動制御装置40は、入力側回動角度θgと出力側回動角度θs(シートバック21の傾動角度)との相対角度差Δθが角度閾値(Δθp1,Δθp2)以上になると、ピニオンギヤ31bを直前の回転方向に対して逆方向に所定量だけ回転させるようにモータ31を駆動する。
【選択図】図6
Description
前傾状態のシート本体20においてロック機構37がロック解除状態となると(図9中のP1参照)、上述のごとくスパイラルスプリング34の付勢力に応じてシートバック21が所定量だけ起立方向に傾斜し出力側回動角度θsは起立回動方向に変化する。このとき、入力側回動角度θgは一定であるから、相対角度差Δθは負側に増加する。
上述したモータ駆動制御処理の変形例として、角度閾値Δθp1,Δθp2は、出力側回動角度θs、すなわち、シートバック21の傾動角度に応じて設定されてもよい。
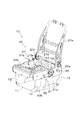
(1)シート装置10は、上述したリンク機構を採用することなく、例えば、床面に支持されるシートクッション22とこのシートクッション22に傾動可能に支持されるシートバック21を有するシート本体20とリクライニング装置30とにより構成されてもよい。
12…前側リンク(リンク機構)
13…後側リンク(リンク機構)
13a…リンク側ギヤ
14…連結軸
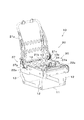
20…シート本体
21…シートバック
21c…シート側ギヤ
22…シートクッション
30…リクライニング装置
31…モータ
31b…ピニオンギヤ(回転軸)
32…セクタギヤ
33…中間ギヤ
34…スパイラルスプリング(付勢部材)
35…回転角度センサ(回転角度検出手段)
36…回動角度センサ(傾動角度検出手段)
37…ロック機構
40…駆動制御装置(モータ駆動制御手段)
θg…入力側回動角度(回転角度)
θm…回転角度(回転角度)
θs…出力側回動角度(傾動角度)
Δθ…相対角度差
Δθp,Δθp1,Δθp2,Δθp3,Δθp4…角度閾値(所定の閾値)
Claims (3)
- 床面に支持されるシートクッションと、
前記シートクッションに対して傾動可能に取り付けられるシートバックと、
前記シートバックを前記シートクッションに対して前傾または起立させるためのモータと、
前記シートクッションと前記モータの回転軸との間に介在されて、前記シートバックを前傾させるための前記回転軸の回転に応じた弾性変形により前記シートバックを前記シートクッションに対して前傾方向に付勢し、前記シートバックを起立させるための前記回転軸の回転に応じた弾性変形により前記シートバックを前記シートクッションに対して起立方向に付勢する付勢部材と、
前記モータを駆動制御するモータ駆動制御手段と、
前記シートクッションに対する前記シートバックの傾動角度を検出する傾動角度検出手段と、
前記回転軸の回転角度を検出する回転角度検出手段と、を備え、
前記モータ駆動制御手段は、前記回転角度と前記傾動角度との相対角度差が所定の閾値以上になると前記モータの前記回転軸を直前の回転方向に対して逆方向に所定量だけ回転させることを特徴とするシート装置。 - 前記回転軸の回転に応じた前記付勢部材の弾性変形により前記シートクッションを前記床面に対して移動させるように支持するリンク機構を備えることを特徴とする請求項1に記載のシート装置。
- 前記所定の閾値は、前記傾動角度に応じて設定されることを特徴とする請求項1または2に記載のシート装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008253892A JP5151873B2 (ja) | 2008-09-30 | 2008-09-30 | シート装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008253892A JP5151873B2 (ja) | 2008-09-30 | 2008-09-30 | シート装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010083305A true JP2010083305A (ja) | 2010-04-15 |
| JP5151873B2 JP5151873B2 (ja) | 2013-02-27 |
Family
ID=42247695
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008253892A Active JP5151873B2 (ja) | 2008-09-30 | 2008-09-30 | シート装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5151873B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005306339A (ja) * | 2004-04-26 | 2005-11-04 | Aisin Seiki Co Ltd | 車両の乗員保護装置 |
| JP2007331716A (ja) * | 2006-06-19 | 2007-12-27 | Auto Network Gijutsu Kenkyusho:Kk | 車両用の電動シート |
| JP2008136325A (ja) * | 2006-11-29 | 2008-06-12 | Imasen Electric Ind Co Ltd | モータ駆動装置 |
-
2008
- 2008-09-30 JP JP2008253892A patent/JP5151873B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005306339A (ja) * | 2004-04-26 | 2005-11-04 | Aisin Seiki Co Ltd | 車両の乗員保護装置 |
| JP2007331716A (ja) * | 2006-06-19 | 2007-12-27 | Auto Network Gijutsu Kenkyusho:Kk | 車両用の電動シート |
| JP2008136325A (ja) * | 2006-11-29 | 2008-06-12 | Imasen Electric Ind Co Ltd | モータ駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5151873B2 (ja) | 2013-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6675276B2 (ja) | 車両用シート装置 | |
| JP5311876B2 (ja) | 座席制御装置 | |
| CN101610935A (zh) | 车辆座椅操作装置及车辆座椅操作方法 | |
| US20120032487A1 (en) | Headrest device, method of adjusting headrest positiion, and vehicle seat | |
| US8511750B2 (en) | Vehicle seat device | |
| JP6266977B2 (ja) | シート装置 | |
| JP5151873B2 (ja) | シート装置 | |
| US20110042993A1 (en) | Seat apparatus for vehicle | |
| JP2008105607A (ja) | シートポジション制御装置 | |
| CN103507663B (zh) | 车辆座椅组件和控制车辆座椅组件的方法 | |
| JP2011000219A (ja) | 車両用シート | |
| JP2009214819A (ja) | 表示パネルの駆動装置 | |
| JP5684008B2 (ja) | 車両用シート | |
| JP2010095010A (ja) | シート装置 | |
| JP2007030843A (ja) | 自動車用シート | |
| JP2013244914A (ja) | シート位置制御装置 | |
| JP5252182B2 (ja) | シートの制御システム | |
| JPS63149237A (ja) | パワ−シ−トの安全装置 | |
| JP2012148753A (ja) | 車両用パワーシート装置 | |
| JP2008189061A (ja) | シート装置 | |
| JP2023102522A (ja) | シート制御装置、シート制御方法 | |
| JP2012214193A (ja) | 車両用シート制御装置 | |
| JP6662707B2 (ja) | シート駆動装置 | |
| JP7674998B2 (ja) | パワーシート制御装置及びパワーシート | |
| JP2012192912A (ja) | 車両用シート |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101028 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121119 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5151873 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |