JP2010074981A - 電動機駆動装置 - Google Patents
電動機駆動装置 Download PDFInfo
- Publication number
- JP2010074981A JP2010074981A JP2008241011A JP2008241011A JP2010074981A JP 2010074981 A JP2010074981 A JP 2010074981A JP 2008241011 A JP2008241011 A JP 2008241011A JP 2008241011 A JP2008241011 A JP 2008241011A JP 2010074981 A JP2010074981 A JP 2010074981A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- winding
- windings
- drive device
- vector control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Control Of Ac Motors In General (AREA)
Abstract
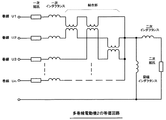
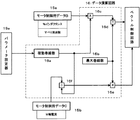
【解決手段】一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機2の第1電動機駆動装置10、第2電動機駆動装置20・・第N電動機駆動装置30、指令手段19,29,39などからなり、この第1電動機駆動装置10はインバータ回路11と、電流検出器12と、ベクトル制御回路A13と、このベクトル制御に必要な制御データを格納するモータ制御用データA14,モータ制御用データB,C15と、その格納値から多巻線電動機2の動作状態に対応した値を導出するデータ演算回路16とから構成し、減機運転するときには、このときの多巻線電動機2の稼動巻線数のみを指令手段19から設定するだけで、この減機運転でのベクトル制御に必要な制御用データとしての多巻線電動機2の電動機定数などを、ベクトル制御回路A15内で速やかに設定し直す。
【選択図】図1
Description
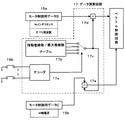
[数1]
iM *=(1/Lm)×Φ2 *
ここで、Lmは多巻線電動機2の励磁インダクタンスである。
[数2]
iT *=τ*/Φ2 *
すなわち、励磁電流演算回路75では上記数1式の演算を行い、除算演算器74では上記数2式の演算を行っている。
た一次周波数指令値ω1 *に積分器83を介することにより、多巻線電動機2のU相巻線と二次磁束とのなす角度値θ* が導出される。
[数3]
Em=vM−R1・iM−L1(di/dt)iM+jω1 *・L1・iT
[数4]
Et=vT−R1・iT−L1(di/dt)iT−jω1 *・L1・iM
上記数3,4式において、R1 は多巻線電動機2の一次抵抗であり、L1 は多巻線電動機2の一次インダクタンスであり、jは虚数単位である。
加算演算器76は、励磁電流演算回路75が出力するM軸電流指令値iM *と前記M軸電流補正値ΔiM *との加算値を新たなM軸電流指令値iM *`として出力している。
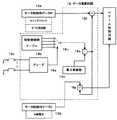
選択された稼動巻線数で除算し、乗算器47jにおいて除算器47iの出力値とメモリ47fに格納されている最大巻線数とを乗算し、さらに、乗算器47kにおいて乗算器47jの出力値と選択された巻線並列数とを乗算して当該稼動巻線数における「M軸電流」が演算される。また、乗算器47mにおいてモータ制御用データD45cに格納されている「T軸電流」と選択された巻線並列数とを乗算して当該稼動巻線数における「T軸電流」が演算される。
Claims (4)
- 一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機の各巻線毎に備えられ、該多巻線電動機をベクトル制御により可変速駆動するそれぞれの電動機駆動装置において、
前記電動機駆動装置では、前記ベクトル制御を行うための制御用データとしての前記多巻線電動機の最大巻線数および該最大巻線数での電動機定数を予め設定し、
前記電動機駆動装置の内の少なくとも1台を稼動させて前記多巻線電動機を減機運転する際には、指令手段を介した外部からの前記多巻線電動機を稼動させる巻線数により、このときのベクトル制御に必要な制御用データを演算するデータ演算回路を備えたことを特徴とする電動機駆動装置。 - 一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機の各巻線毎に備えられ、該多巻線電動機をベクトル制御により可変速駆動するそれぞれの電動機駆動装置において、
前記電動機駆動装置では、前記ベクトル制御を行うための制御用データとしての前記多巻線電動機の最大巻線数および該最大巻線数での電動機定数を予め設定し、
前記電動機駆動装置の内の少なくとも1台を稼動させて前記多巻線電動機を減機運転する際には、指令手段を介した外部から論理信号により、前記多巻線電動機を稼動させる巻線数でのベクトル制御に必要な制御用データを演算するデータ演算回路を備えたことを特徴とする電動機駆動装置。 - 一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機の巻線k(kは2以上の整数)本に対してk:1の割合で備えられ、該多巻線電動機をベクトル制御により可変速駆動するそれぞれの電動機駆動装置において、
前記電動機駆動装置では、前記ベクトル制御を行うための制御用データとしての前記多巻線電動機の最大巻線数および該最大巻線数での電動機定数を予め設定し、
前記電動機駆動装置の内の少なくとも1台を稼動させて前記多巻線電動機を減機運転する際には、指令手段を介した外部からの前記多巻線電動機を稼動させる巻線数および並列させる巻線数とにより、このときのベクトル制御に必要な制御用データを演算するデータ演算回路を備えたことを特徴とする電動機駆動装置。 - 一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機の巻線k(kは2以上の整数)本に対してk:1の割合で備えられ、該多巻線電動機をベクトル制御により可変速駆動するそれぞれの電動機駆動装置において、
前記電動機駆動装置では、前記ベクトル制御を行うための制御用データとしての前記多巻線電動機の最大巻線数および該最大巻線数での電動機定数を予め設定し、
前記電動機駆動装置の内の少なくとも1台を稼動させて前記多巻線電動機を減機運転する際には、指令手段を介した外部から論理信号により、前記多巻線電動機を稼動させる巻線数および並列させる巻線数でのベクトル制御に必要な制御用データを演算するデータ演算回路を備えたことを特徴とする電動機駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008241011A JP5313604B2 (ja) | 2008-09-19 | 2008-09-19 | 電動機駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008241011A JP5313604B2 (ja) | 2008-09-19 | 2008-09-19 | 電動機駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010074981A true JP2010074981A (ja) | 2010-04-02 |
| JP5313604B2 JP5313604B2 (ja) | 2013-10-09 |
Family
ID=42206239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008241011A Active JP5313604B2 (ja) | 2008-09-19 | 2008-09-19 | 電動機駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5313604B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016063562A (ja) * | 2014-09-16 | 2016-04-25 | 東芝三菱電機産業システム株式会社 | 電動機駆動装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5471309A (en) * | 1977-11-17 | 1979-06-07 | Micro Technology Kenkyusho | Columnar rotor |
| JP2000004600A (ja) * | 1998-06-16 | 2000-01-07 | Nippon Otis Elevator Co | 可変速駆動装置 |
| JP2006129667A (ja) * | 2004-11-01 | 2006-05-18 | Honda Motor Co Ltd | ロータ位置のセンサレス検出方法 |
| JP2006314184A (ja) * | 2005-05-09 | 2006-11-16 | Sofutoronikusu Kk | モータ装置 |
| JP2008043046A (ja) * | 2006-08-07 | 2008-02-21 | Aida Eng Ltd | サーボモータの制御方法 |
-
2008
- 2008-09-19 JP JP2008241011A patent/JP5313604B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5471309A (en) * | 1977-11-17 | 1979-06-07 | Micro Technology Kenkyusho | Columnar rotor |
| JP2000004600A (ja) * | 1998-06-16 | 2000-01-07 | Nippon Otis Elevator Co | 可変速駆動装置 |
| JP2006129667A (ja) * | 2004-11-01 | 2006-05-18 | Honda Motor Co Ltd | ロータ位置のセンサレス検出方法 |
| JP2006314184A (ja) * | 2005-05-09 | 2006-11-16 | Sofutoronikusu Kk | モータ装置 |
| JP2008043046A (ja) * | 2006-08-07 | 2008-02-21 | Aida Eng Ltd | サーボモータの制御方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016063562A (ja) * | 2014-09-16 | 2016-04-25 | 東芝三菱電機産業システム株式会社 | 電動機駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5313604B2 (ja) | 2013-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8022660B2 (en) | Control apparatus for AC rotary machine | |
| EP2544361A2 (en) | Inverter Device and Electric Motor Drive System | |
| US11223313B2 (en) | Inverter control device and motor drive system | |
| US9692340B2 (en) | Variable torque angle for electric motor | |
| JP2019097341A (ja) | モータ制御装置およびモータシステム | |
| JP2005065439A (ja) | 電圧形インバータの制御方法 | |
| JPH11252986A (ja) | 多重巻き電動機の制御装置 | |
| JP2002233180A (ja) | 電力変換装置 | |
| JP5313604B2 (ja) | 電動機駆動装置 | |
| JP6674765B2 (ja) | 電動機の制御装置及びそれを用いた電動車両 | |
| JP5217760B2 (ja) | 電動機駆動装置 | |
| JP6376049B2 (ja) | 回転機の制御装置 | |
| KR20140093156A (ko) | 모터 제어 장치 및 모터 제어 방법 | |
| JP6981135B2 (ja) | 誘導電動機の制御装置 | |
| Drozdowski | Speed control of multiphase cage induction motors incorporating supply sequence | |
| JP5930071B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP2007082321A (ja) | 電動機駆動装置 | |
| JP4061517B2 (ja) | 交流電動機の可変速制御装置 | |
| JP4655405B2 (ja) | 誘導電動機のベクトル制御方法とベクトル制御装置 | |
| JP6387813B2 (ja) | 超電導並列回路装置における偏流防止装置 | |
| JP5170370B2 (ja) | 直列多重インバータと過電圧防止方法 | |
| Guerrero et al. | Flux level selection in vector-controlled dual stator winding induction machines | |
| JP5699489B2 (ja) | 電動機駆動装置 | |
| JP4682521B2 (ja) | 誘導電動機の可変速制御装置 | |
| Guerrero et al. | Air-gap flux density optimization in dual stator winding induction machines |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20110422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130704 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5313604 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |