JP2010071797A - 画像処理による車両のホイル位置計測装置 - Google Patents
画像処理による車両のホイル位置計測装置 Download PDFInfo
- Publication number
- JP2010071797A JP2010071797A JP2008239520A JP2008239520A JP2010071797A JP 2010071797 A JP2010071797 A JP 2010071797A JP 2008239520 A JP2008239520 A JP 2008239520A JP 2008239520 A JP2008239520 A JP 2008239520A JP 2010071797 A JP2010071797 A JP 2010071797A
- Authority
- JP
- Japan
- Prior art keywords
- foil
- vehicle
- line sensor
- wheel
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012545 processing Methods 0.000 title claims abstract description 67
- 238000011056 performance test Methods 0.000 claims abstract description 22
- 239000011888 foil Substances 0.000 claims description 130
- 230000002093 peripheral effect Effects 0.000 claims description 50
- 230000001133 acceleration Effects 0.000 claims description 10
- 238000003384 imaging method Methods 0.000 claims description 10
- 230000000007 visual effect Effects 0.000 abstract description 10
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 8
- 238000005259 measurement Methods 0.000 description 7
- 238000012360 testing method Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000009434 installation Methods 0.000 description 5
- 238000007689 inspection Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 230000010485 coping Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
Images





Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】ローラ21上に設置されホイル11を回転させて性能試験を行う車両1のホイル11の位置を計測する車両のホイル位置計測装置を、回転する前記ホイル11に対向する位置に走査方向が水平方向または鉛直方向となるように且つその視野が前記ホイル11の外周縁と二箇所で交差するように設置されて、回転する前記ホイル11を撮像するラインセンサ3と、前記ラインセンサ3によって取得した画像上に前記ホイル11の外周縁を検出し、検出した前記ホイル11の外周縁の位置及び検出した前記ホイル11の外周縁間の距離に基づいて前記ホイル11の位置を算出する画像処理部4とから構成した。
【選択図】図1
Description
ky=(y−y0)/(w−w0) …(2)
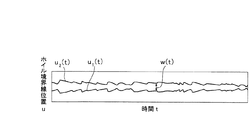
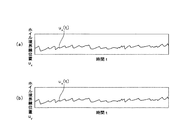
y(t)=ky(w(t)−w0)−y0 …(4)
ky=(y−y0)/(uy−uy0) …(6)
y(t)=ky(wy(t)−uy0) …(8)
2 シャシーダイナモメータ
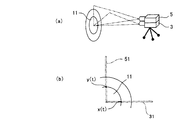
3,5 ラインセンサ
4 画像処理部
11 ホイル
21 ローラ
22 ダイナモメータ
23 シャシーダイナモメータ制御装置
31,51 ラインセンサの視野
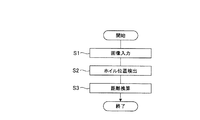
41 画像入力部
42 変換係数入力部
43 ホイル位置検出部
44 距離換算部
45 処理メモリ
Claims (4)
- ローラ上に設置されホイルを回転させて性能試験を行う車両のホイルの位置を計測するホイル位置計測装置であって、
回転する前記ホイルに対向する位置に走査方向が水平方向または鉛直方向となるように且つその視野が前記ホイルの外周縁と二箇所で交差するように設置されて、回転する前記ホイルを撮像するラインセンサと、
前記ラインセンサによって取得した画像上に前記ホイルの外周縁を検出し、検出した前記ホイルの外周縁の位置に基づいて前記ホイルの前記走査方向の位置を算出する一方、検出した前記ホイルの外周縁間の距離に基づいて前記ホイルの前記走査方向と直交する方向の位置を算出する画像処理手段と
からなることを特徴とする画像処理による車両のホイル位置計測装置。 - ローラ上に設置されホイルを回転させて性能試験を行う車両のホイルの位置を計測するホイル位置計測装置であって、
前記ホイルに対向する位置に走査方向が水平方向となるように且つその視野が前記ホイルの外周縁と一箇所で交差するように配置されて、回転する前記ホイルを撮像する第一のラインセンサと、
前記ホイルに対向する位置に走査方向が鉛直方向となるように且つその視野が前記ホイルの外周縁と一箇所で交差するように配置されて、回転する前記ホイルを撮像する第二のラインセンサと、
前記第一のラインセンサによって取得した画像上の前記ホイルの外周縁の位置及び前記第二のラインセンサによって取得した画像上の前記ホイルの外周縁の位置を検出し、検出した前記ホイルの二つの外周縁の位置に基づいて前記ホイルの水平方向の位置及び鉛直方向の位置をそれぞれ算出する画像処理手段と
からなることを特徴とする画像処理による車両のホイル位置計測装置。 - 前記画像処理手段によって算出した車両の位置の変化に基づいて前記車両の移動速度を算出する演算手段を備える
ことを特徴とする請求項1又は請求項2のいずれか1項に記載の画像処理による車両のホイル位置計測装置。 - 前記画像処理手段において算出した車両の位置の変化に基づいて移動加速度を算出する演算手段を備える
ことを特徴とする請求項1乃至請求項3のいずれか1項に記載の画像処理による車両のホイル位置計測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008239520A JP5228731B2 (ja) | 2008-09-18 | 2008-09-18 | 画像処理による車両のホイル位置計測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008239520A JP5228731B2 (ja) | 2008-09-18 | 2008-09-18 | 画像処理による車両のホイル位置計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010071797A true JP2010071797A (ja) | 2010-04-02 |
| JP5228731B2 JP5228731B2 (ja) | 2013-07-03 |
Family
ID=42203729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008239520A Expired - Fee Related JP5228731B2 (ja) | 2008-09-18 | 2008-09-18 | 画像処理による車両のホイル位置計測装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5228731B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101858828A (zh) * | 2010-05-31 | 2010-10-13 | 吴明 | 轻重车型通用底盘测功机 |
| CN110546456A (zh) * | 2017-04-20 | 2019-12-06 | 百斯巴特有限责任公司 | 用于底盘测量的方法和设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62177410A (ja) * | 1985-12-30 | 1987-08-04 | アンスティチュ ナショナル ドゥ ルシェルシュ シュル レ トランスポール エ ラール セキュリテ | 自動車のタイヤの変形を測定するための装置 |
| JPH07125513A (ja) * | 1993-11-02 | 1995-05-16 | Bridgestone Corp | 円環体の自動装着方法及び装置 |
| JP2005351730A (ja) * | 2004-06-10 | 2005-12-22 | Horiba Ltd | 車両設置状態判定装置 |
| WO2006057363A1 (ja) * | 2004-11-26 | 2006-06-01 | Honda Motor Co., Ltd. | 車両用灯体検査装置および検査方法 |
| JP2007331641A (ja) * | 2006-06-16 | 2007-12-27 | Bridgestone Corp | 支持リムへのタイヤの芯合わせ方法および装置 |
| JP2009222679A (ja) * | 2008-03-18 | 2009-10-01 | Ono Sokki Co Ltd | 車両位置検出装置及び車両位置検出方法 |
-
2008
- 2008-09-18 JP JP2008239520A patent/JP5228731B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62177410A (ja) * | 1985-12-30 | 1987-08-04 | アンスティチュ ナショナル ドゥ ルシェルシュ シュル レ トランスポール エ ラール セキュリテ | 自動車のタイヤの変形を測定するための装置 |
| JPH07125513A (ja) * | 1993-11-02 | 1995-05-16 | Bridgestone Corp | 円環体の自動装着方法及び装置 |
| JP2005351730A (ja) * | 2004-06-10 | 2005-12-22 | Horiba Ltd | 車両設置状態判定装置 |
| WO2006057363A1 (ja) * | 2004-11-26 | 2006-06-01 | Honda Motor Co., Ltd. | 車両用灯体検査装置および検査方法 |
| JP2007331641A (ja) * | 2006-06-16 | 2007-12-27 | Bridgestone Corp | 支持リムへのタイヤの芯合わせ方法および装置 |
| JP2009222679A (ja) * | 2008-03-18 | 2009-10-01 | Ono Sokki Co Ltd | 車両位置検出装置及び車両位置検出方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101858828A (zh) * | 2010-05-31 | 2010-10-13 | 吴明 | 轻重车型通用底盘测功机 |
| CN110546456A (zh) * | 2017-04-20 | 2019-12-06 | 百斯巴特有限责任公司 | 用于底盘测量的方法和设备 |
| CN110546456B (zh) * | 2017-04-20 | 2021-11-30 | 百斯巴特有限责任公司 | 用于底盘测量的方法和设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5228731B2 (ja) | 2013-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1210541C (zh) | 用于评价相互联接部件的轴承或者活节中间隙的方法和装置 | |
| US9097514B2 (en) | Device and method for inspecting tyre shape | |
| CN102753313B (zh) | 用于在车辆上确定间距的方法和装置 | |
| JP5387202B2 (ja) | タイヤ解析システムおよびタイヤ解析方法 | |
| JP2003505681A (ja) | 自動車のホイールジオメトリ及び/又は軸線ジオメトリを規定する装置 | |
| JP5533216B2 (ja) | タイヤ性能測定システム及びタイヤ性能測定方法 | |
| JP2003207319A (ja) | レール断面形状測定装置 | |
| CN107367228A (zh) | 用于分析和检测物体几何特征的设备和方法 | |
| JP5444879B2 (ja) | シャシーダイナモメータ | |
| JP6966198B2 (ja) | 車両試験装置、車両試験方法及び車両試験装置用プログラム | |
| JPH1038533A (ja) | タイヤの形状測定装置とその方法 | |
| CN105051486B (zh) | 形状检查装置 | |
| JP2006064690A (ja) | 管内面形状測定装置 | |
| JP5228731B2 (ja) | 画像処理による車両のホイル位置計測装置 | |
| JP6040770B2 (ja) | タイヤ解析システムおよび解析方法 | |
| JP2008096152A (ja) | ラジアルランアウト測定装置、及び、ラジアルランアウトの測定方法 | |
| JP6638353B2 (ja) | 重錘位置検出装置及び方法 | |
| JP5857481B2 (ja) | タイヤ状態検出方法及び装置 | |
| JP4802967B2 (ja) | 画像処理による車両のホイル中心位置計測装置 | |
| JP2009198370A (ja) | 画像処理による非接触式位置計測装置 | |
| JPH07174672A (ja) | 車輪踏面欠陥検査装置 | |
| JP5446502B2 (ja) | シャシーダイナモメータ | |
| JP5605491B2 (ja) | シャシーダイナモメータ | |
| US9772259B2 (en) | Method for calibrating an X-ray testing system for a tire type and method for checking the position of cords in a tire | |
| JP5017919B2 (ja) | 検査装置及び検査方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130304 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5228731 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |