JP2010069662A - 輪転印刷装置 - Google Patents
輪転印刷装置 Download PDFInfo
- Publication number
- JP2010069662A JP2010069662A JP2008237867A JP2008237867A JP2010069662A JP 2010069662 A JP2010069662 A JP 2010069662A JP 2008237867 A JP2008237867 A JP 2008237867A JP 2008237867 A JP2008237867 A JP 2008237867A JP 2010069662 A JP2010069662 A JP 2010069662A
- Authority
- JP
- Japan
- Prior art keywords
- transfer roller
- printing
- substrate
- conveyor
- moving means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007639 printing Methods 0.000 claims abstract description 152
- 239000000758 substrate Substances 0.000 claims description 85
- 239000000463 material Substances 0.000 claims description 22
- 238000007645 offset printing Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 8
- 238000004140 cleaning Methods 0.000 description 6
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 238000000034 method Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000013518 transcription Methods 0.000 description 2
- 230000035897 transcription Effects 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 239000000123 paper Substances 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Landscapes
- Rotary Presses (AREA)
- Inking, Control Or Cleaning Of Printing Machines (AREA)
Abstract
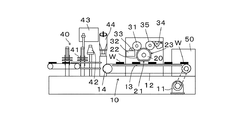
【解決手段】コンベア10等の移動手段によって移動と停止を繰り返しながら送られてくる被印刷物Wに対して転写ローラ20で印刷を行う輪転印刷装置であって、前記転写ローラ20の一部に印刷退避部21を設けると共に、前記移動手段が移動を停止している間は回転する転写ローラ20の前記印刷退避部21が前記被印刷物Wに対面して非接触状態を維持するようタイミングを制御する制御手段50を設けている。
【選択図】 図1
Description
特開平6−255085号公報はオフセット印刷機のゴム胴に関し、ゴム胴本体(2)に設けたブランケット(1)巻回用のスリット溝(3)の一部を中断することで、局部的に完全な円筒面を形成して、これによって2つのゴム胴本体(2)のスリット溝(3)同士が出会った時に生じる接触圧を吸収してショックが発生しないようにした構成が開示されている(特許文献1)。
また特開平9−277493号公報はオフセット印刷機のブランケット胴着脱装置に関し、版胴と圧胴に対するブランケット胴の印刷時における胴入れと印刷終了時における胴抜きとを高速印刷化に対応して最適に行うようにした構成が開示されている。即ち、圧胴の回転軸の近くにエンコーダ(1)を設け、そこからのパルスを高速のカウンタ(2)でカウントすることで、中央演算装置(CPU)(3)の速度演算部(4)で圧胴の回転速度、即ち印刷速度を算出し、この算出された印刷速度に基づき印刷運転中に常時胴抜きタイミングを演算し、指令信号(7)が出されると、中央演算装置(3)のタイミング出力部(6)から空気圧シリンダ(8)に胴抜きタイミングが出力されるようにした構成が提供されている(特許文献2)。
また印刷を間歇的に停止させるたび、転写ローラ全体を一旦後退させる構成を採用する場合には、やはり良好な印刷状態を安定して行うことが難しいし、転写ローラを進退させる必要から、周期の短い間歇印刷には対応できない問題がある。
勿論、転写ローラを印刷位置に置いたまま回転を続けると、被印刷物の印刷不要位置がインキで汚されたり、転写ローラが被印刷物の印刷不要位置と接触することで摩耗したり破損する問題も生じる。
上記のような問題は、例えばコンベア等の移動手段により間歇的に供給されてくる被印刷物に対して印刷を行う場合に生じる。
また特許文献1に示すオフセット印刷機のゴム胴の場合、ゴム胴本体(2)のスリット溝(3)の一部を局部的に完全な円筒面とすることで、ゴム胴同士の接触圧を軽減することを主たる目的として構成されているが、それらの構成は印刷を間歇的に行うために適したものではない。
また特許文献2に示すオフセット印刷機のブランケット胴着脱装置の場合、高速印刷における胴抜きのタイミングを正確に行わせることができるものではあるが、やはり間歇供給される被印刷物に対して良好な印刷を行わせるものではない。
前記移動手段として、コンベアベルト12上に載せられた各被印刷物Wの移動と停止とを一定の周期で行うようにしたコンベア10を設けると共に、該コンベア10の停止中に前記被印刷物Wをコンベアベルト12上に順次供給、載置する供給装置40を設けたものにおいて、
前記転写ローラ20を回転させる印刷機駆動用モータ30と前記コンベア10を駆動させるコンベア駆動用モータ11と前記供給装置40の供給アームロボット44との全体の動きを制御する中央制御装置50を設け、
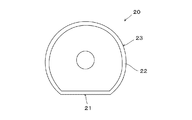
前記転写ローラ20は、その外側周全体にブランケット22を取り付けると共に、該ブランケット22を取り付けた状態の外側周に凹部からなる印刷退避部21を設け、該印刷退避部21によって移動停止状態の被印刷物Wに対して回転状態の転写ローラ20が接触するのを回避可能に構成し、
前記印刷退避部21以外の転写ローラ20の円弧部分23は、これを現に印刷を行うための部分とすると共にその円弧部分23の長さを前記被印刷物Wの1回の移動長さと同じ長さに構成し、
前記中央制御装置50は、コンベアベルト12の移動速度と転写ローラ20の回転速度とを同速に一致させるように制御構成すると共に、前記コンベア駆動用モータ11の停止と再開のタイミングをそれぞれ前記印刷機駆動用モータ30の所定の回転角度に同期させるように制御構成し、更にコンベア駆動用モータ11停止期間中にタイミングを合わせて前記供給アームロボット44を駆動させるように制御構成することにより、
停止状態にある被印刷物Wに対する転写ローラ20の接触を前記印刷退避部21により回避すると共に移動状態の被印刷物Wに対する転写ローラ20の接触による印刷を前記円弧部分23により行い、且つ各被印刷物Wの1回の移動長さを転写ローラ20の前記円弧部分23の長さに調整して、順次間歇供給されてくる各被印刷物Wに対する印刷を同じ様に行い、更に被印刷物Wを停止しているコンベアベルト12上にタイミングを合わせて順次供給、載置するようにした、ことを特徴としている。
しかも移動手段が移動している間は、転写ローラは、その位置を何ら変位させることなく、元ある位置を保ったまま、移動する被印刷物に接触して印刷を行うことができる。このため、短い周期で間歇供給(移動)されてくる被印刷物に対しても速やかに対応して、効率よく印刷を行うことができる。またその際、転写ローラの位置が変位することがなく、且つ転写ローラの回転も停止したり開始したりすることなく安定して行われるので、安定した状況のもとで良好な印刷が可能となる。
印刷退避部を凹部としたことで、転写ローラの軸からの半径を短くすることができ、被印刷物との接触を容易に回避することができる。
これにより転写ローラの回転速度と移動手段の移動速度を同じにすることで、簡単且つ確実に両者間でのタイミングをとって、間歇供給(移動)される被印刷物に対して正確に、安定して印刷を行うことが可能となる。
オフセット印刷が現にできると共に、オフセット印刷に際して転写ブランケットが印刷退避部で途絶えることなく、外側周全体に取り付けられていることで、インクや水のバランスが崩れることなく保持され、良好な印刷ができる。転写ブランケットが途中で分断されるとインクや水の分散が偏りやすく、印刷の仕上がりがよくない。
勿論、被印刷物の大きさに適した転写ブランケットを取り付けることで、ブランケットの表面に余分なインキが付着せずインキ量も経済的に消費できる。
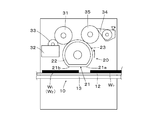
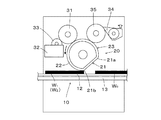
図1は本発明の実施形態を示す輪転印刷装置の概略正面図、図2は本実施形態を示す輪転印刷装置の要部を示す側面図、図3はコンベアが停止した時の転写ローラとコンベア上の被印刷物との関係を説明する図、図4はコンベアが停止して転写ローラだけが回転している状態を説明する図、図5はコンベアが移動を再開した時の転写ローラとコンベア上の被印刷物との関係を説明する図、図6は印刷退避部を複数(2箇所)設けた転写ローラを用いた場合の転写ローラと被印刷物との関係を説明する図、図7は転写ローラに転写ブランケットを巻着した状態を示す図、図8は本発明の実施形態に係る輪転印刷装置の制御系を説明するブロック図である。
前記コンベア駆動用サーボモータ11は、前記コンベア10を間歇駆動するために用いられる。即ち、コンベア駆動用サーボモータ11が回転とその停止を繰り返すことで、コンベア10は移動と停止を繰り返しながら間歇移動されるようになされている。
コンベア駆動用サーボモータ11の回転とその停止は、ベルト車14に伝達され、更にコンベアベルト12に伝達されて、コンベアベルト12が移動と停止を繰り返す。これによりコンベアベルト12上或いはコンベアベルト12に取り付けられた図示しない載置台上に置かれた被印刷物Wが、移動と停止を繰り返しながら前記転写ローラ20の方へ移動供給されて行く。
なおコンベアベルト12は、コンベア駆動用サーボモータ11の回転及び停止を正確に伝えることができるものを用いる。勿論、コンベア駆動用サーボモータ11からコンベアベルト12に至る間には必要に応じて減速機や他の伝達手段を介在させることができる。コンベアベルト12は必ずしもベルトである必要はなく、要するに被印刷物Wを間歇移動させながら転写ローラ20に供給できればよい。
また前記吸引装置13は、例えば図示しないエアコンプレッサと接続した装置とし、前記コンベアベルト12の下方から被印刷物Wを吸引する構成とすることができる。
インキ壺32のインキがインキローラ33によって、また図示しない湿し水が版胴31に供給され、版胴31の版のインキ模様が転写ローラ20に転写される。そして転写ローラ20により被印刷物Wに印刷が施される。転写ローラ20の汚れは、クリーニング装置34のクリーニングローラ35で解消される。
本実施形態では、オフセット印刷仕様として、版胴31から転写ローラ20を介して被印刷物Wに印刷を施す構成を記載した。しかしオフセット印刷以外の輪転印刷にも適用することができる。オフセット印刷以外の輪転印刷の場合は、版胴(版ローラ)31から被印刷物Wに印刷がなされる。従って本実施形態の転写ローラ20は、被印刷物Wに印刷を施す(転写させる)ローラとしての意味を持ち、オフセット印刷以外の輪転印刷の場合には版胴(版ローラ)をその範疇に含む概念である。
図8を参照して、中央制御装置50からの制御指令は、それぞれドライバー11a、30a、44aを介してコンベア駆動用サーボモータ11、印刷機駆動用サーボモータ30、供給アームロボット44を制御動作させる。それらコンベア駆動用サーボモータ11、印刷機駆動用サーボモータ30、供給アームロボット44の動きは、それぞれのドライバー11a、30a、44aにフィードバックされて、動作の修正がなされる。
先ず図7も参照して、転写ローラ20には外側周の全体にブランケット22が取り付けられている。そしてこのブランケット22が取り付けられた転写ローラ20の円周、即ち外側周の一部に印刷退避部21を設けている。この印刷退避部21は、本実施形態では転写ローラ20に1箇所(図1〜5、図7参照)設けているが、勿論、2箇所(図6参照)に設けてもよい。また転写ローラ20の大きさに応じて、3箇所以上設けることもできる。
転写ローラ20の印刷退避部21以外の部分は円弧部分23とされ、現に印刷を行う部分とされる。
前記印刷退避部21は、被印刷物Wとの接触を絶つことで、被印刷物Wに対して印刷を行わない退避部分である。この印刷退避部21は、円形ロールの外側周の一部を切り欠いて形成してもよいし、或いはロール製造時に最初から円形ロールの外側周を弦のような平面形状に一体成形してもよく、その形状についての成形方法は問わない。
印刷退避部21の特徴は、要するにロールの回転中心軸からの半径が他の円形部分より短いということであり、これにより被印刷物Wとの接触が物理的に回避されるようにしたことである。
勿論、印刷退避部21では印刷が行われないので、該印刷退避部21には必ずしも前記ブランケット22を取り付ける必要はない。しかしブランケット22を全体に取り付けることで、転写ローラ20上に転写されたインキ等が分断されるのが防止され、良好な印刷を確保することができる。
前記コンベアベルト12が停止されている間に、前記供給装置40の供給アームロボット44による被印刷物Wのコンベアベルト12上への載置動作が行われる。
前記コンベアベルト12の移動と停止に伴って、コンベアベルト12上に載置された被印刷物Wが移動と停止を繰り返しながら、その途中で転写ローラ20による印刷がなされる。
その一方、被印刷物Wが停止している時に転写ローラ20が被印刷物Wに接触すると、被印刷物Wがインクで汚れること、また転写ローラ20のインキの分布が乱れて印刷に悪影響が出ること、また転写ローラ20が被印刷物Wとの接触摩擦で破損し或いは寿命が短くなる等の問題がある。
従って被印刷物Wが停止している状態においては、転写ローラ20の印刷退避部21が被印刷物Wに対面しながら回転するようにして、非接触を保つ必要がある。また被印刷物Wが停止状態から再び移動を開始した時には、転写ローラ20の印刷退避部21以外の円弧部分23が速やかに被印刷物Wに接触することができるようにする必要がある。
先ず転写ローラ20の回転速度とコンベアベルト12の移動速度(被印刷物Wの移動速度)とが同じ速度になるように、中央制御装置50で制御する。これにより印刷時における転写ローラ20の回転速度と被印刷物Wの移動速度とが同じになり、軽減された摩擦下で良好な印刷が可能となる。
被印刷物Wはコンベアベルト12上に予め定められた一定位置に一定の間隔で載置され、移動と停止を繰り返す。転写ローラ20は、印刷運転中は回転を停止することなく回転する。
前記転写ローラ20の印刷退避部21の先端部分21aが被印刷物W1の先端に対面した時点でコンベアベルト12の移動を停止するには、転写ローラ20を回転駆動させる印刷機駆動用サーボモータ30の回転角度が所定の回転角度(以後、移動停止角度とする)になった時にコンベア駆動用サーボモータ11の回転を停止すればよい。前記移動停止角度とは、転写ローラ20の印刷退避部21の先端部分21aの位置が、被印刷物Wの先端に対面する位置となる時点に対応する印刷機駆動用サーボモータ30の回転角度である。
中央制御装置50は自らが制御する印刷機駆動用サーボモータ30の回転角度が移動停止角度になるのに合わせて、コンベア駆動用サーボモータ11の回転を停止するようにコンベア駆動用サーボモータ11の回転を制御すればよい。この制御は、例えば両サーボモータ30、11をパルス制御する際に、印刷機駆動用サーボモータ30が移動停止角度になるパルス数に対応してコンベア駆動用サーボモータ11を停止するように、コンベア駆動用サーボモータ11に対するパルス数制御を行えばよい。
この時点では、転写ローラ20の印刷退避部21の後端部分21b(回転方向の後端部分)が被印刷物W1の先端に対面した状態となる。この状態から被印刷物W1が移動を再び開始し、また回転を継続する転写ローラ20は、その円弧部分23が被印刷物W1に対面してくるので、印刷モードに入る。
前記転写ローラ20の印刷退避部21の後端部分21bが被印刷物W1の先端に対面した時点でコンベアベルト12の移動を再開するには、転写ローラ20を回転駆動させる印刷機駆動用サーボモータ30の回転角度が対応する所定の回転角度(以後、移動開始角度とする)になった時に、コンベア駆動用サーボモータ11の回転を再開すればよい。前記移動開始角度とは、転写ローラ20の印刷退避部21の後端部分21bの位置が被印刷物Wの先端に対面する位置となる時点に対応する印刷機駆動用サーボモータ30の回転角度である。
中央制御装置50は、自らが制御する印刷機駆動用サーボモータ30の回転角度が移動開始角度になるのに合わせて、コンベア駆動用サーボモータ11の回転を再開するように、コンベア駆動用サーボモータ11の回転を制御すればよい。この制御は、例えば両サーボモータ30、11をパルス制御する際に、印刷機駆動用サーボモータ30が移動開始角度になるパルス数に対応して、コンベア駆動用サーボモータ11の回転を再開するように、コンベア駆動用サーボモータ11に対するパルス出力の再開を指令するようにパルス出力制御を行えばよい。
以上から明らかなように、被印刷物Wが1回に移動する距離、即ちコンベアベルト12の1回当りの移動長さは、転写ローラ20の印刷退避部21間の円弧部分23の長さと同じになる。
コンベアベルト12が間歇停止されるのは、停止している間に被印刷物Wをコンベアベルト12上に供給して載置するためである。コンベアベルト12が停止している状態で被印刷物Wを供給することで、コンベアベルト12上の所定の位置に正確に位置決めすることができる。
供給アームロボット44で被印刷物Wをコンベアベルト12上に載せるタイミングは、中央制御装置50によって制御される。即ち中央制御装置50は、印刷機駆動用サーボモータ30の回転角度が移動停止角度になった時から移動開始角度になるまでの間に、被印刷物Wがコンベアベルト12上に置かれるよう、供給アームロボット44に対して動作タイミングの指令を出す。
中央制御装置50による制御の方法は、既に説明した制御方法と同様である。しかし、この場合は、印刷機駆動用サーボモータ30に2つの移動停止角度が設定され、また2つの移動再開始角度が設定される。そして移動停止角度になる都度、コンベア駆動用サーボモータ11を停止させる。また移動開始角度になる都度、コンベア駆動用サーボモータ11の回転を再開させる。コンベアベルト12が停止した時(停止直後)は、印刷退避部21の先端部分21aが転写ローラ20の下方にある被印刷物Wの先端に対面した状態となって非接触となる。またコンベアベルト12が停止状態から移動を再開した時(移動再開直後)は、印刷退避部21の後端部分21bが転写ローラ20の下方にある被印刷物Wの先端に対面した状態となる。その後、移動を開始した被印刷物Wと転写ローラ20の円弧部分23とが対面して接触し、印刷が行われる。この場合、個々の円弧部分23の長さはコンベアベルト12の1回の移動長さと同じにされる。
11 コンベア駆動用サーボモータ
12 コンベアベルト
13 吸引装置
14 ベルト車
20 転写ローラ
21 印刷退避部
21a 先端部分
21b 後端部分
22 ブランケット
23 円弧部分
30 印刷機駆動用サーボモータ
31 版胴
32 インキ壺
33 インキローラ
34 クリーニング装置
35 クリーニングローラ
36 ギア
40 供給装置
41 回転テーブル
42 検知カメラ
43 供給制御モニタ
44 供給アームロボット
50 中央制御装置
W 被印刷部
W0 被印刷物
W1 被印刷物
W2 被印刷物
Claims (6)
- コンベア等の移動手段によって移動と停止を繰り返しながら送られてくる被印刷物に対して転写ローラで印刷を行う輪転印刷装置であって、前記転写ローラの一部に印刷退避部を設けると共に、前記移動手段が移動を停止している間は回転する転写ローラの前記印刷退避部が前記被印刷物に対面して非接触状態を維持するようタイミングを制御する制御手段を設けていることを特徴とする輪転印刷装置。
- 印刷退避部は転写ローラの外側周の周りに凹部として1乃至複数を設けていることを特徴とする請求項1に記載の輪転印刷装置。
- 転写ローラの印刷退避部間の円弧部分の長さと、移動手段による1回の移動長さとを同じにしてあることを特徴とする請求項1又は2に記載の輪転印刷装置。
- 印刷退避部を含めた転写ローラの外側周全体に転写ブランケットを取り付けてあることを特徴とする請求項1〜3の何れかに記載の輪転印刷装置。
- 制御手段は、マイクロコンピュータを用いた中央制御装置であって、転写ローラを回転させる印刷機駆動用サーボモータに所定の回転角度を設定することで、該印刷機駆動用サーボモータの前記所定の回転角度と同期を取って移動手段の移動と停止とを行うよう制御すると共に、前記転写ローラと前記移動手段との速度を一致させるよう前記印刷機駆動用サーボモータと前記移動手段の駆動用サーボモータとを制御する構成としていることを特徴とする請求項1〜4の何れかに記載の輪転印刷装置。
- 移動手段に対して被印刷物を載置するための供給装置を付属させると共に、該供給装置による被印刷物の移動手段への載置が移動手段の停止期間中になされるよう制御手段でタイミングを制御する構成としていることを特徴とする請求項1〜5の何れかに記載の輪転印刷装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008237867A JP4391574B1 (ja) | 2008-09-17 | 2008-09-17 | 輪転印刷装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008237867A JP4391574B1 (ja) | 2008-09-17 | 2008-09-17 | 輪転印刷装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4391574B1 JP4391574B1 (ja) | 2009-12-24 |
| JP2010069662A true JP2010069662A (ja) | 2010-04-02 |
Family
ID=41549849
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008237867A Active JP4391574B1 (ja) | 2008-09-17 | 2008-09-17 | 輪転印刷装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4391574B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108215475A (zh) * | 2017-12-13 | 2018-06-29 | 重庆市琦缘包装有限公司 | 一种纸板印刷装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6218048B2 (ja) * | 2012-05-31 | 2017-10-25 | エルジー・ケム・リミテッド | 反転オフセット印刷装置および方法 |
-
2008
- 2008-09-17 JP JP2008237867A patent/JP4391574B1/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108215475A (zh) * | 2017-12-13 | 2018-06-29 | 重庆市琦缘包装有限公司 | 一种纸板印刷装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4391574B1 (ja) | 2009-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100849934B1 (ko) | 랜덤 주기 칩 이송장치 | |
| JP4772766B2 (ja) | 加工機械内において、ショート・インキング装置を備える印刷装置を駆動する方法及び駆動装置 | |
| CN103502100B (zh) | 图像形成装置及形成有图像的罐体的制造方法 | |
| JP5675198B2 (ja) | ラベルを切断するための切断装置および切断方法、ならびにラベル貼付装置 | |
| CN102458706A (zh) | 压花加工装置、压花加工方法及压花罐 | |
| JP4391574B1 (ja) | 輪転印刷装置 | |
| US9302461B2 (en) | Proof printing press | |
| CN103101290B (zh) | 间歇式柔印设备 | |
| US20070119316A1 (en) | Cylindrical body supporting device | |
| US8074569B2 (en) | Roller pad printer and method for printing | |
| JP5775733B2 (ja) | 画像形成装置、および、画像が形成された缶体の製造方法 | |
| JP5647939B2 (ja) | 画像形成装置、および、画像が形成された缶体の製造方法 | |
| JP6233807B2 (ja) | グラビア印刷機およびグラビア印刷機の運転方法 | |
| JP2005534536A (ja) | 印刷装置および印刷方法 | |
| JP2004082741A (ja) | シリンダ洗浄制御方法 | |
| KR100844216B1 (ko) | 금박인쇄장치의 가공재료 이송장치 | |
| US20150158287A1 (en) | Printing machine, printing apparatus, and printing method | |
| JP2013043347A (ja) | シート又はウェブの異物除去装置 | |
| EP2842748A1 (en) | Liquid transfer device and liquid transfer method | |
| JP4391957B2 (ja) | アンビルロール機構、それを用いた作業装置及びその装置の使用方法 | |
| JP2003205598A (ja) | 個別駆動式印刷機械の駆動モータ制御方法 | |
| JPS624163A (ja) | 連続シ−トの間欠送り装置 | |
| JP2009137297A (ja) | 枚葉紙材料加工機械の駆動のための方法および駆動装置 | |
| JP6405219B2 (ja) | 印刷機 | |
| JPH1034456A (ja) | 電子部品供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090908 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091007 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121016 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4391574 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151016 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |