JP2010066965A - 搬送システム - Google Patents
搬送システム Download PDFInfo
- Publication number
- JP2010066965A JP2010066965A JP2008232123A JP2008232123A JP2010066965A JP 2010066965 A JP2010066965 A JP 2010066965A JP 2008232123 A JP2008232123 A JP 2008232123A JP 2008232123 A JP2008232123 A JP 2008232123A JP 2010066965 A JP2010066965 A JP 2010066965A
- Authority
- JP
- Japan
- Prior art keywords
- transport
- vehicle
- conveyance
- notice
- advance notice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012546 transfer Methods 0.000 title abstract description 58
- 238000001514 detection method Methods 0.000 claims abstract description 67
- 230000008859 change Effects 0.000 claims abstract description 65
- 238000005304 joining Methods 0.000 claims description 11
- 230000032258 transport Effects 0.000 description 328
- 238000000034 method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









Landscapes
- Warehouses Or Storage Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
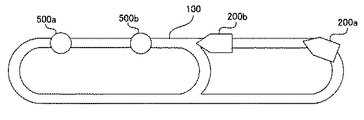
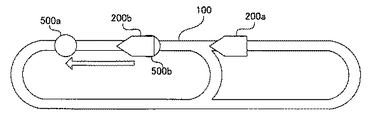
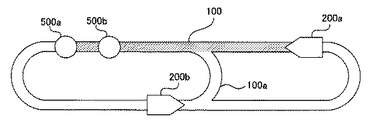
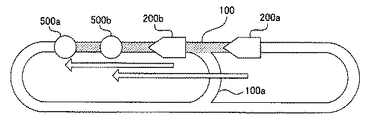
【解決手段】搬送システムは、軌道(100)と、軌道上を夫々走行する複数の搬送車(200)と、複数の搬送車のうち一の搬送車を被搬送物(400)の搬送元に呼び寄せる搬送予告を行う搬送予告手段(310)と、一の搬送車以外の他の搬送車における走行状態の変化を検出する変化検出手段(320,360)と、一の搬送車とされた第1搬送車(200a)及び搬送元(500a)、並びに走行状態の変化が検出された第2搬送車(200b)の位置を夫々検出する位置検出手段(330)と、第2搬送車が第1搬送車と比べて搬送元に近い場合に、第1搬送車に対する搬送予告を解除すると共に、第2搬送車に搬送予告を行うように搬送予告手段を制御する制御手段(340)とを備える。
【選択図】図1
Description
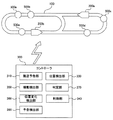
先ず、第1実施形態に係る搬送システムの全体構成について、図1及び図2を参照して説明する。ここに図1は、第1実施形態に係る搬送システムの全体構成を概略的に示す上面図であり、図2は、ビークルの具体的な構成を示す斜視図である。
次に、第2実施形態に係る搬送システムについて、図7から図11を参照して説明する。尚、第2実施形態は、上述の第1実施形態と比べて、再配車に関する構成及び再配車の際の動作が異なり、その他の構成及び動作については概ね同様である。このため第2実施形態では、第1実施形態と異なる部分について詳細に説明し、その他の重複する部分については適宜説明を省略する。
次に、第3実施形態に係る搬送システムについて、図12から図15を参照して説明する。尚、第3実施形態は、上述の第1及び第2実施形態と比べて、再配車に関する構成及び再配車の際の動作が異なり、その他の構成及び動作については概ね同様である。このため第3実施形態では、第1及び第2実施形態と異なる部分について詳細に説明し、その他の重複する部分については適宜説明を省略する。
Claims (8)
- 軌道と、
該軌道上を夫々走行する複数の搬送車と、
前記複数の搬送車のうち一の搬送車を被搬送物の搬送元に呼び寄せる搬送予告を前記一の搬送車に対して行う搬送予告手段と、
前記一の搬送車以外の他の搬送車における走行状態の変化を検出する変化検出手段と、
前記一の搬送車とされた第1搬送車及び前記搬送元、並びに前記走行状態の変化が検出された第2搬送車の位置を夫々検出する位置検出手段と、
前記第2搬送車が前記第1搬送車と比べて前記搬送元に近い場合に、前記第1搬送車に対する前記搬送予告を解除すると共に、前記第2搬送車を新たに前記一の搬送車として前記第2搬送車に対して前記搬送予告を行うように前記搬送予告手段を制御する制御手段と
を備えることを特徴とする搬送システム。 - 前記変化検出手段は、前記他の搬送車の前記被搬送物の搬送終了を、前記走行状態の変化として検出することを特徴とする請求項1に記載の搬送システム。
- 前記変化検出手段は、前記他の搬送車の前記軌道における分岐箇所又は合流箇所の通過を、前記走行状態の変化として検出することを特徴とする請求項1又は2に記載の搬送システム。
- 前記軌道は、複数のエリアを有するように構成されており、
前記変化検出手段は、前記他の搬送車の前記複数のエリア間の移動を、前記走行状態の変化として検出することを特徴とする請求項1から3のいずれか一項に記載の搬送システム。 - 前記他の搬送車が前記被搬送物を積載していることを検出する積載検出手段を更に備え、
前記変化検出手段は、前記他の搬送車のうち前記被搬送物を積載していない搬送車について、前記走行状態の変化を検出する
ことを特徴とする請求項1から4のいずれか一項に記載の搬送システム。 - 前記第2搬送車が前記搬送予告を受けることができるか否かを判定する判定手段を更に備え、
前記制御手段は、前記第2搬送車が前記搬送予告を受けることができないとされた場合に、前記搬送予告手段を制御しない
ことを特徴とする請求項1から5のいずれか一項に記載の搬送システム。 - 前記判定手段は、前記第2搬送車から前記搬送元までの距離が所定距離より短い場合に、前記第2搬送車は前記搬送予告を受けることができないと判定することを特徴とする請求項6に記載の搬送システム。
- 前記第1搬送車が受けている前記搬送予告以外の他の搬送予告を、前記第2搬送車が受けているか否かを検出する予告検出手段を更に備え、
前記位置検出手段は、前記第2搬送車が前記他の搬送予告を受けている場合に、前記第1搬送車及び前記搬送元、並びに前記第2搬送車の位置に加えて、前記他の搬送予告に係る他の搬送元の位置を検出し、
前記制御手段は、前記第2搬送車及び前記他の搬送元が、いずれも前記第1搬送車及び前記搬送元間に存在する場合に、前記第1搬送車に対する前記搬送予告及び前記第2搬送車に対する前記他の搬送予告を解除すると共に、前記第2搬送車に前記搬送予告を行うように、且つ前記第1搬送車に前記他の搬送予告を行うように前記搬送予告手段を制御する
ことを特徴とする請求項1から7のいずれか一項に記載の搬送システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232123A JP5374981B2 (ja) | 2008-09-10 | 2008-09-10 | 搬送システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232123A JP5374981B2 (ja) | 2008-09-10 | 2008-09-10 | 搬送システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010066965A true JP2010066965A (ja) | 2010-03-25 |
| JP5374981B2 JP5374981B2 (ja) | 2013-12-25 |
Family
ID=42192505
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008232123A Active JP5374981B2 (ja) | 2008-09-10 | 2008-09-10 | 搬送システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5374981B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090334A1 (ja) * | 2015-11-27 | 2017-06-01 | 村田機械株式会社 | 搬送システム及び搬送方法 |
| JP2019085223A (ja) * | 2017-11-07 | 2019-06-06 | 村田機械株式会社 | 搬送車システム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7006775B2 (ja) * | 2018-04-12 | 2022-01-24 | 村田機械株式会社 | 搬送車システム及び搬送車制御方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05324064A (ja) * | 1992-05-26 | 1993-12-07 | Toshiba Corp | 軌道台車制御装置 |
| JP2002006951A (ja) * | 2000-06-16 | 2002-01-11 | Murata Mach Ltd | 有軌道台車システム |
| JP2002332105A (ja) * | 2001-05-09 | 2002-11-22 | Murata Mach Ltd | 無人搬送車システム |
-
2008
- 2008-09-10 JP JP2008232123A patent/JP5374981B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05324064A (ja) * | 1992-05-26 | 1993-12-07 | Toshiba Corp | 軌道台車制御装置 |
| JP2002006951A (ja) * | 2000-06-16 | 2002-01-11 | Murata Mach Ltd | 有軌道台車システム |
| JP2002332105A (ja) * | 2001-05-09 | 2002-11-22 | Murata Mach Ltd | 無人搬送車システム |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090334A1 (ja) * | 2015-11-27 | 2017-06-01 | 村田機械株式会社 | 搬送システム及び搬送方法 |
| CN108290684A (zh) * | 2015-11-27 | 2018-07-17 | 村田机械株式会社 | 输送系统以及输送方法 |
| JPWO2017090334A1 (ja) * | 2015-11-27 | 2018-11-01 | 村田機械株式会社 | 搬送システム及び搬送方法 |
| TWI676582B (zh) * | 2015-11-27 | 2019-11-11 | 日商村田機械股份有限公司 | 搬送系統及搬送方法 |
| US10479613B2 (en) | 2015-11-27 | 2019-11-19 | Murata Machinery, Ltd. | Transport system and transport method |
| CN108290684B (zh) * | 2015-11-27 | 2020-06-23 | 村田机械株式会社 | 输送系统以及输送方法 |
| JP2019085223A (ja) * | 2017-11-07 | 2019-06-06 | 村田機械株式会社 | 搬送車システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5374981B2 (ja) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108001979B (zh) | 物品搬运设备 | |
| JP4337683B2 (ja) | 搬送システム | |
| JP4366663B2 (ja) | 搬送台車システム | |
| US9086697B2 (en) | Processing facility | |
| JP4766111B2 (ja) | 搬送車システム | |
| JP6652083B2 (ja) | 物品搬送設備 | |
| EP3848769B1 (en) | Conveyance vehicle system | |
| JP2003146412A (ja) | 搬送システム | |
| JP2004207335A (ja) | 搬送システムの制御装置 | |
| JP2005243729A (ja) | 搬送システム | |
| JP5374981B2 (ja) | 搬送システム | |
| JP2005029319A (ja) | 搬送システム | |
| US12187548B2 (en) | Article transport facility | |
| JP2010006478A (ja) | 走行システム | |
| TW202423811A (zh) | 搬運車系統 | |
| JP2008230843A (ja) | 搬送台車の制御方法 | |
| JP2000353015A (ja) | 自動搬送システムの空車の追出し制御方法 | |
| JP7591203B2 (ja) | 保管システム | |
| JP2010097998A (ja) | 搬送システム | |
| JP2002332105A (ja) | 無人搬送車システム | |
| JP2011162329A (ja) | 荷搬送システムの荷搬送方法 | |
| JP2005162451A (ja) | 搬送システム | |
| JP3995085B2 (ja) | ループ搬送システム | |
| JP2006005047A (ja) | 搬送システムおよび搬送方法 | |
| TW202601473A (zh) | 物品搬送設備 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110803 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20120420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120904 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5374981 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |