JP2010066965A - Transfer system - Google Patents
Transfer system Download PDFInfo
- Publication number
- JP2010066965A JP2010066965A JP2008232123A JP2008232123A JP2010066965A JP 2010066965 A JP2010066965 A JP 2010066965A JP 2008232123 A JP2008232123 A JP 2008232123A JP 2008232123 A JP2008232123 A JP 2008232123A JP 2010066965 A JP2010066965 A JP 2010066965A
- Authority
- JP
- Japan
- Prior art keywords
- transport
- vehicle
- conveyance
- notice
- advance notice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012546 transfer Methods 0.000 title abstract description 58
- 238000001514 detection method Methods 0.000 claims abstract description 67
- 230000008859 change Effects 0.000 claims abstract description 65
- 238000005304 joining Methods 0.000 claims description 11
- 230000032258 transport Effects 0.000 description 328
- 238000000034 method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









Abstract
Description
本発明は、例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、軌道上で搬送する搬送システムの技術分野に関する。 The present invention relates to a technical field of a transport system that transports an object to be transported such as a container in which various substrates for manufacturing a semiconductor device are accommodated on a track.
この種の搬送システムとして、複数の搬送車が軌道上を走行することによって、被搬送物を搬送するというものがある。搬送指示を受けた複数の搬送車は、先ず搬送元まで走行し、そこで被搬送物を積載した後、搬送先まで走行する。そして、搬送先に被搬送物を荷下ろしする。 As this type of transport system, there is a system in which a plurality of transport vehicles travel on a track to transport an object to be transported. The plurality of transport vehicles that have received the transport instruction first travels to the transport source, loads the objects to be transported there, and then travels to the transport destination. Then, the object to be transported is unloaded to the transport destination.
このような搬送システムでは、システムの動作を管理するコントローラ等から搬送車に対して夫々搬送指示が行われる。コントローラは、搬送効率を高めるため、最短所要時間で被搬送物を搬送できるように搬送車を制御するとされている(例えば、特許文献1参照)。 In such a transport system, a transport instruction is issued to the transport vehicle from a controller or the like that manages the operation of the system. The controller is supposed to control the transport vehicle so that the transported object can be transported in the shortest required time in order to increase the transport efficiency (see, for example, Patent Document 1).
しかしながら、上述したような技術においては、軌道に複数の搬送車が存在しており、システム全体における搬送車の状況は時間と共に変化する。このため、例えば搬送指示を行った時点では搬送に最適であったはずの搬送車が、搬送元に到着するまでの期間において別の搬送車へと変わってしまう場合がある。言い換えれば、システムにおける状況の変化に応じて搬送指示を行わなければ、最適な搬送を行えないという技術的問題点がある。 However, in the technique as described above, there are a plurality of transport vehicles on the track, and the state of the transport vehicles in the entire system changes with time. For this reason, for example, a transport vehicle that should have been optimal for transport at the time when the transport instruction is given may change to another transport vehicle in a period until it arrives at the transport source. In other words, there is a technical problem that optimum transport cannot be performed unless a transport instruction is issued according to a change in the situation in the system.
本発明は、例えば上述した問題点に鑑みなされたものであり、効率的に被搬送物を搬送可能な搬送システムを提供することを課題とする。 This invention is made | formed in view of the problem mentioned above, for example, and makes it a subject to provide the conveyance system which can convey a to-be-conveyed object efficiently.
本発明の搬送システムは上記課題を解決するために、軌道と、該軌道上を夫々走行する複数の搬送車と、前記複数の搬送車のうち一の搬送車を被搬送物の搬送元に呼び寄せる搬送予告を前記一の搬送車に対して行う搬送予告手段と、前記一の搬送車以外の他の搬送車における走行状態の変化を検出する変化検出手段と、前記一の搬送車とされた第1搬送車及び前記搬送元、並びに前記走行状態の変化が検出された第2搬送車の位置を夫々検出する位置検出手段と、前記第2搬送車が前記第1搬送車と比べて前記搬送元に近い場合に、前記第1搬送車に対する前記搬送予告を解除すると共に、前記第2搬送車を新たに前記一の搬送車として前記第2搬送車に対して前記搬送予告を行うように前記搬送予告手段を制御する制御手段とを備える。 In order to solve the above problems, the transport system of the present invention calls a track, a plurality of transport vehicles respectively traveling on the track, and one of the plurality of transport vehicles to the transport source of the object to be transported. A transport notice unit that performs a transport advance notice on the one transport vehicle, a change detection unit that detects a change in a running state in a transport vehicle other than the one transport vehicle, and a first transport vehicle. Position detection means for detecting the position of the first transport vehicle and the transport source, and the position of the second transport vehicle from which the change in the running state is detected, and the second transport vehicle compared to the first transport vehicle. The transfer notice to the first transfer vehicle is canceled and the second transfer vehicle is newly set as the first transfer vehicle so that the transfer notice is made to the second transfer vehicle. Control means for controlling the notice means.
本発明の搬送システムによれば、その動作時には、例えば天井に敷設されたレール等の軌道上を走行する、ビークル、OHT(Overhead Hoist Transport)等の搬送車によって、FOUP(Front Opening Unified Pod)等の被搬送物が搬送される。搬送車は、軌道に沿って設けられた複数の保管棚間で被搬送物を搬送する。 According to the transport system of the present invention, during operation, for example, FOUP (Front Opening Unified Pod) or the like by a transport vehicle such as a vehicle or OHT (Overhead Hoist Transport) that travels on a track such as a rail laid on the ceiling. To-be-conveyed object is conveyed. A conveyance vehicle conveys a to-be-conveyed object between the several storage shelves provided along the track.
搬送の際には、先ず搬送予告手段によって搬送予告が一の搬送車に対して行われ、該一の搬送車が被搬送物の搬送元に呼び寄せられる。呼び寄せられた搬送車には、搬送元から搬送先へ被搬送物を搬送するように搬送指示が行われる。搬送指示を受けた搬送車は、搬送元から被搬送物を積載し、搬送先へと搬送する。尚、搬送予告は、典型的には、上述したように搬送元へ搬送車を呼び寄せるだけのものであるが、搬送指示を含んでいてもよい。即ち、搬送車を呼び寄せる段階で、搬送先への搬送が指示されてもよい。言い換えれば、本発明の搬送予告は、搬送元から搬送先へと被搬送物を搬送させる搬送指示に含まれるものであってもよく、被搬送物を積載する搬送車を搬送元に向かわせるような制御であれば、搬送予告と呼ぶことができる。即ち、搬送予告は、搬送指示に先立って行われるような制御に限定されない。但し、説明の便宜上、以降の説明においては、搬送指示が行われる前に搬送予告が行われる場合(即ち、搬送予告と搬送指示とが別々に行われる場合)を例にとり説明する。搬送予告を受けていない搬送車は、典型的には、軌道上を巡回している。即ち、搬送を行っていない搬送車も、軌道上を夫々走行し続けている。 At the time of conveyance, first, a conveyance advance notice is given to one conveyance vehicle by the conveyance advance notice unit, and the one conveyance vehicle is called to the conveyance source of the object to be conveyed. The transported vehicle is instructed to transport the object to be transported from the transport source to the transport destination. The transport vehicle that has received the transport instruction loads the transport object from the transport source and transports the transport object to the transport destination. Note that the conveyance advance notice is typically only for calling the conveyance vehicle to the conveyance source as described above, but may include a conveyance instruction. That is, the conveyance to the conveyance destination may be instructed at the stage of calling the conveyance vehicle. In other words, the transport notice of the present invention may be included in a transport instruction for transporting the transported object from the transport source to the transport destination, and the transport vehicle on which the transported object is loaded is directed to the transport source. If it is a simple control, it can be called a conveyance advance notice. That is, the conveyance advance notice is not limited to the control performed prior to the conveyance instruction. However, for convenience of explanation, in the following description, a case where a conveyance advance notice is performed before a conveyance instruction is performed (that is, a case where a conveyance advance notice and a conveyance instruction are performed separately) will be described as an example. A transport vehicle that has not received a transport notice typically travels on a track. That is, the transport vehicles that are not transporting continue to travel on the tracks.
搬送予告が行われると、変化検出手段によって、一の搬送車以外の他の搬送車における走行状態の変化が検出される。尚、ここでの「走行状態」とは、複数の搬送車の中から搬送予告が行われる一の搬送車を決定する際に用いられる、搬送車に係るパラメータであり、例えば搬送車の走行位置や搬送車が被搬送物を搬送中であるか否か等の情報を含んでいる。搬送予告手段は、典型的には、搬送元に最も近く、且つ被搬送物を搬送中でない搬送車に対して搬送予告を行うことで、システムにおける搬送を効率的なものとする。即ち、本発明における走行状態とは、複数の搬送車の中から効率的に搬送を行える搬送車を決定するための情報ともいえる。言い換えれば、搬送予告を行う搬送車を決定する際に利用できる各種情報は、本発明における走行状態を示すものであるといえる。 When the conveyance advance notice is performed, the change detection means detects a change in the running state in another conveyance vehicle other than the one conveyance vehicle. Here, the “traveling state” is a parameter related to the transport vehicle used when determining one transport vehicle for which the transport advance notice is performed from a plurality of transport vehicles. For example, the travel position of the transport vehicle And whether the transport vehicle is transporting the object to be transported or the like. The conveyance notice unit typically makes the conveyance in the system efficient by giving a conveyance notice to the conveyance vehicle that is closest to the conveyance source and is not conveying the object to be conveyed. That is, the traveling state in the present invention can be said to be information for determining a transport vehicle that can efficiently transport a plurality of transport vehicles. In other words, it can be said that the various types of information that can be used when determining the transport vehicle for which the transport notification is to be performed indicates the traveling state in the present invention.
走行状態の変化が検出されると、位置検出手段によって、一の搬送車とされた第1搬送車及び搬送元、並びに走行状態の変化が検出された第2搬送車の位置が夫々検出される。尚、第2搬送車は、1台の第1搬送車に対して複数存在し得る。よって、第2搬送車の位置は、典型的には、複数の第2搬送車について夫々検出されることとなる。第1搬送車及び搬送元についても、搬送予告毎に存在することになるため、システム全体で見れば複数存在し得る。このため、第1搬送車及び搬送元の位置も、搬送予告毎に夫々検出される。 When the change in the running state is detected, the position detection unit detects the first and second transfer vehicles, which are a single transfer vehicle, and the position of the second transfer vehicle from which the change in the running state is detected. . Note that a plurality of second transport vehicles may exist for one first transport vehicle. Therefore, the position of the second transport vehicle is typically detected for each of the plurality of second transport vehicles. Since the first transport vehicle and the transport source exist for each transport advance notice, a plurality of first transport vehicles and transport sources may exist in the whole system. For this reason, the positions of the first transport vehicle and the transport source are also detected for each transport advance notice.
本発明では特に、第2搬送車が第1搬送車と比べて搬送元に近い場合に、制御手段によって、第1搬送車に対する搬送予告を解除すると共に、第2搬送車を第1搬送車に代わる新たに一の搬送車とした上で、該第2搬送車に対して搬送予告を行うように搬送予告手段が制御される。尚、ここでの第2搬送車及び第1搬送車、並びに搬送元の互いの位置関係は、直線距離ではなく、軌道上の走行距離によって比較される。即ち、「第2搬送車が第1搬送車と比べて搬送元に近い」とは、第2搬送車が軌道を走行して搬送元に到達するまでの時間が、第1搬送車が軌道を走行して搬送元に到達するまでの時間より短いことを意味している。 In the present invention, in particular, when the second transport vehicle is closer to the transport source than the first transport vehicle, the control means cancels the transport advance notice for the first transport vehicle, and the second transport vehicle is changed to the first transport vehicle. The transport notice means is controlled so that a transport notice is given to the second transport car after a new transport car is replaced. The positional relationship between the second transport vehicle, the first transport vehicle, and the transport source here is not a straight line distance, but is compared by a travel distance on the track. That is, “the second transport vehicle is closer to the transport source than the first transport vehicle” means that the time until the second transport vehicle travels on the track and reaches the transport source is the first transport vehicle on the track. It means that it is shorter than the time required to travel and reach the transfer source.
第1搬送車から第2搬送車へ搬送予告が受け継がれることにより、第1搬送車は軌道上を巡回する状態となる。一方、第2搬送車は、搬送予告によって搬送元へ呼び寄せられる。上述したように、第2搬送車は、第1搬送車よりも搬送元から近い位置を走行している。よって、第2搬送車に搬送予告が行われることで、搬送元に搬送車が到達するまでの時間を短縮することができる。従って、より速やかに搬送を行うことが可能となる。尚、搬送予告が重複して行われている状態となってしまうのを防止するため、第2搬送車に対する搬送予告は、第1搬送車に対する搬送予告が解除された後に行われるのが好ましい。また、第2搬送車が複数存在する場合には、その中から1台の搬送車が選択された上で、搬送予告が行われる。例えば、搬送予告は、搬送元までの距離が最も短い第2搬送車に対して行われる。 When the conveyance advance notice is inherited from the first conveyance vehicle to the second conveyance vehicle, the first conveyance vehicle goes around on the track. On the other hand, the second transport vehicle is called to the transport source by the transport advance notice. As described above, the second transport vehicle travels closer to the transport source than the first transport vehicle. Therefore, the time until the transport vehicle reaches the transport source can be shortened by performing the transport advance notice on the second transport vehicle. Therefore, it becomes possible to carry out more promptly. In order to prevent the conveyance advance notice from being repeated, it is preferable that the conveyance advance notice for the second conveyance vehicle is performed after the conveyance advance notice for the first conveyance vehicle is canceled. In addition, when there are a plurality of second transport vehicles, a transport advance notice is performed after one transport vehicle is selected from them. For example, the conveyance advance notice is performed for the second conveyance vehicle having the shortest distance to the conveyance source.
以上説明したように、本発明の搬送システムによれば、搬送車の走行状態が変化した際に、その時点で最適な搬送車に対して搬送予告が再び行われる。従って、効率的に被搬送物を搬送することが可能である。 As described above, according to the transport system of the present invention, when the traveling state of the transport vehicle changes, the transport advance notice is performed again for the optimal transport vehicle at that time. Therefore, it is possible to efficiently transport the object to be transported.
本発明の搬送システムの一態様では、前記変化検出手段は、前記他の搬送車の前記被搬送物の搬送終了を、前記走行状態の変化として検出する。 In one aspect of the transport system of the present invention, the change detecting means detects the end of transport of the transported object of the other transport vehicle as a change in the traveling state.
この態様によれば、変化検出手段によって、他の搬送車における被搬送物の搬送終了が、走行状態の変化として検出される。尚、「搬送終了」とは、搬送車が搬送を終えて、次の搬送予告を受けることができるようになった状態を指している。検出手段は、例えば搬送車が被搬送物を荷下ろしした際に、走行状態の変化を検出する。 According to this aspect, the change detection means detects the end of conveyance of the object to be conveyed in another conveyance vehicle as a change in the traveling state. “Transport end” refers to a state in which the transport vehicle has finished transporting and can receive the next transport notice. For example, when the transport vehicle unloads the object to be transported, the detection unit detects a change in the traveling state.
上述したように構成すれば、他の搬送車が搬送中の状態(即ち、搬送予告を受けることができない状態)から搬送予告を受けることができる状態へとなったことを、容易且つ確実に検出できる。即ち、他の搬送車の走行状態の変化を好適に検出できる。よって、第2搬送車とされる搬送車を好適に検出できる。 If comprised as mentioned above, it will detect easily and reliably that the state which can receive a conveyance advance notice from the state (namely, the state which cannot receive a conveyance advance notice) of the other conveyance vehicle is conveyed. it can. That is, it is possible to suitably detect a change in the traveling state of another transport vehicle. Therefore, the conveyance vehicle used as the 2nd conveyance vehicle can be detected suitably.
本発明の搬送システムの他の態様では、前記変化検出手段は、前記他の搬送車の前記軌道における分岐箇所又は合流箇所の通過を、前記走行状態の変化として検出する。 In another aspect of the transport system of the present invention, the change detecting means detects passage of a branching point or a joining point in the track of the other transport vehicle as a change in the traveling state.
この態様によれば、変化検出手段によって、他の搬送車による軌道の分岐箇所又は合流箇所の通過が、走行状態の変化として検出される。尚、「分岐箇所」は、軌道が複数の分岐経路に分岐する箇所であり、「合流箇所」は、複数の分岐経路が合流する箇所である。分岐箇所及び合流箇所は、典型的には、軌道上に複数設けられている。また、ここでの「通過」とは、搬送車が分岐箇所又は合流箇所を通り過ぎた状態を含む他、分岐箇所又は合流箇所に到達した、或いは分岐箇所又は合流箇所から所定距離の位置に到達した状態を含むものとする。 According to this aspect, the change detection means detects the passage of the track at the branching point or the joining point as a change in the traveling state. The “branch point” is a point where the trajectory branches into a plurality of branch paths, and the “merge point” is a part where a plurality of branch paths merge. Typically, a plurality of branch points and junction points are provided on the track. In addition, the term “passing” here includes a state where the transport vehicle has passed through a branching point or a joining point, and has reached a branching point or a joining point, or has reached a position at a predetermined distance from the branching point or the joining point. Including state.
分岐箇所においては、搬送車がいずれの分岐経路を選択したかによって、複数の搬送車の互いの位置関係(即ち、走行状態)が変化する。また、搬送車が合流箇所において合流された経路に進入した際においても、上述した分岐箇所の場合と同様に、複数の搬送車の互いの位置関係が変化する。よって、搬送車が分岐箇所又は合流箇所を通過したことを検出すれば、走行状態の変化を好適に検出できる。従って、第2搬送車とされる搬送車を好適に検出できる。 At the branch point, the positional relationship (that is, the traveling state) of the plurality of transport vehicles changes depending on which branch route the transport vehicle has selected. In addition, even when the transport vehicle enters the route joined at the joining location, the mutual positional relationship of the plurality of transport vehicles changes as in the case of the branch location described above. Therefore, if it is detected that the transport vehicle has passed through the branch point or the junction point, it is possible to suitably detect the change in the traveling state. Therefore, it is possible to suitably detect the transport vehicle as the second transport vehicle.
本発明の搬送システムの他の態様では、前記軌道は、複数のエリアを有するように構成されており、前記変化検出手段は、前記他の搬送車の前記複数のエリア間の移動を、前記走行状態の変化として検出する。 In another aspect of the transport system of the present invention, the track is configured to have a plurality of areas, and the change detection unit moves the travel between the plurality of areas of the other transport vehicle as the travel. Detect as a change in state.
この態様によれば、変化検出手段によって、他の搬送車による複数のエリア間の移動が、走行状態の変化として検出される。即ち、搬送車が一のエリアから他のエリアへと移動した際に、走行状態の変化が検出される。 According to this aspect, the movement between the plurality of areas by the other transport vehicles is detected as a change in the traveling state by the change detection means. That is, when the transport vehicle moves from one area to another area, a change in traveling state is detected.
軌道が複数のエリアを有する場合には、例えば複数の搬送車の走行は、エリア毎に管理される。そして、各エリアにおける搬送車の台数は、互いに大きな差が出ないように、ある程度バランスがとられる。具体的には、搬送車の数が多くなりすぎたエリアから、搬送車の少ないエリアへ搬送車が移動することで、搬送車の台数バランスがとられる。 When the track has a plurality of areas, for example, the traveling of the plurality of transport vehicles is managed for each area. The number of transport vehicles in each area is balanced to some extent so that there is no great difference between them. Specifically, the number of transport vehicles is balanced by moving the transport vehicles from an area where the number of transport vehicles is excessive to an area where there are few transport vehicles.
エリア間で搬送車が移動すると、搬送車が移動してきたエリアにおいては、新たな搬送車が突然現われた状態となる。このため、搬送予告によって搬送元に向かう搬送車と比べて、より搬送元に近い位置に搬送車が存在することになり得る。よって、エリア間での搬送車の移動を検出すれば、走行状態の変化を好適に検出できる。従って、第2搬送車とされる搬送車を好適に検出できる。 When the transport vehicle moves between areas, a new transport vehicle suddenly appears in the area where the transport vehicle has moved. For this reason, compared with the transport vehicle heading to the transport source due to the transport advance notice, the transport vehicle may exist at a position closer to the transport source. Therefore, if the movement of the transport vehicle between the areas is detected, a change in the traveling state can be suitably detected. Therefore, it is possible to suitably detect the transport vehicle as the second transport vehicle.
本発明の搬送システムの他の態様では、前記他の搬送車が前記被搬送物を積載していることを検出する積載検出手段を更に備え、前記変化検出手段は、前記他の搬送車のうち前記被搬送物を積載していない搬送車について、前記走行状態の変化を検出する。 In another aspect of the transport system of the present invention, the transport system further includes a load detection unit that detects that the other transport vehicle is stacking the object to be transported, and the change detection unit includes the other transport vehicle. A change in the traveling state is detected for a transport vehicle on which the object to be transported is not loaded.
この態様によれば、変化検出手段によって走行状態の変化が検出される前に、積載検出手段によって、他の搬送車が被搬送物を積載しているか否かが検出される。変化検出手段では、他の搬送車のうち被搬送物を積載していない搬送車について、走行状態の変化を検出する。即ち、被搬送物を積載している搬送車については、走行状態の変化を検出しない。 According to this aspect, before the change detection unit detects a change in the traveling state, the loading detection unit detects whether another conveyance vehicle is loaded with an object to be conveyed. The change detection means detects a change in the running state of a transport vehicle that is not loaded with an object to be transported among other transport vehicles. That is, no change in the running state is detected for a transport vehicle carrying a transported object.
被搬送物を積載している搬送車は、仮にその走行位置が検出され、第1搬送車よりも搬送元に近いとされた場合であっても、第1搬送車に代わって搬送予告を受けることができない。このため、被搬送物を積載している搬送車についての走行状態の検出は、制御手段による搬送予告手段の制御には影響しない。よって、搬送物を積載していない搬送車について走行状態の変化を検出するようにすれば、システムにおける処理を軽くすることができ、より好適に搬送効率を向上させることが可能となる。 The transport vehicle loaded with the object to be transported receives a transport advance notice on behalf of the first transport vehicle even if the travel position is detected and the transport vehicle is closer to the transport source than the first transport vehicle. I can't. For this reason, the detection of the traveling state of the transport vehicle carrying the transported object does not affect the control of the transport notice unit by the control unit. Therefore, if a change in the running state is detected for a transport vehicle on which a transported product is not loaded, processing in the system can be lightened, and transport efficiency can be improved more favorably.
本発明の搬送システムの他の態様では、前記第2搬送車が前記搬送予告を受けることができるか否かを判定する判定手段を更に備え、前記制御手段は、前記第2搬送車が前記搬送予告を受けることができないとされた場合に、前記搬送予告手段を制御しない。 In another aspect of the transport system of the present invention, the transport system further comprises determination means for determining whether or not the second transport vehicle can receive the transport advance notice, and the control means is configured such that the second transport vehicle is transported by the transport vehicle. If it is determined that the advance notice cannot be received, the conveyance advance notice means is not controlled.
この態様によれば、制御手段によって搬送予告手段が制御される前に、判定手段によって、第2搬送車が搬送予告を受けることができるか否かが判定される。このため、第2搬送車は、搬送予告手段によって行われた搬送予告を確実に受けることができる。従って、第1搬送車における搬送予告を解除したにもかかわらず、第2搬送車が搬送予告をうけることができないという事態を回避することが可能である。 According to this aspect, before the conveyance notice unit is controlled by the control unit, the determination unit determines whether or not the second conveyance vehicle can receive the conveyance notice. For this reason, the 2nd conveyance vehicle can receive the conveyance advance notice performed by the conveyance advance notice means certainly. Therefore, it is possible to avoid a situation in which the second transport vehicle cannot receive the transport advance notice even though the transport advance notice in the first transport vehicle is cancelled.
上述した判定手段を備える態様では、前記判定手段は、前記第2搬送車から前記搬送元までの距離が所定距離より短い場合に、前記第2搬送車は前記搬送予告を受けることができないと判定するように構成してもよい。 In the aspect including the determination unit described above, the determination unit determines that the second transport vehicle cannot receive the transport notice when the distance from the second transport vehicle to the transport source is shorter than a predetermined distance. You may comprise.
このように構成すれば、前記第2搬送車から前記搬送元までの距離が所定距離より短い場合には、判定手段によって、第2搬送車は搬送予告を受けることができないと判定される。尚、「所定距離」とは、仮に第2搬送車と搬送元が近い位置であったとしても、搬送車が搬送予告を受けてから搬送元に停止できるような距離であり、搬送車の速度やシステムの処理能力等に応じて予め設定される。 If comprised in this way, when the distance from the said 2nd conveyance vehicle to the said conveyance origin is shorter than predetermined distance, it will determine with a determination means that the 2nd conveyance vehicle cannot receive conveyance advance notice. The “predetermined distance” is a distance at which the transport vehicle can stop at the transport source after receiving the transport advance notice even if the transport vehicle is close to the transport source. And preset according to the processing capacity of the system.
上述したように構成すれば、例えば第2搬送車が搬送元に近過ぎることにより、第2搬送車が搬送元に向かおうとした際に、搬送元を通過してしまっている(即ち、停止が間に合わない)という状態を回避することができる。従って、搬送予告を受けた第2搬送車は、確実に搬送元に向かうことが可能となる。 If comprised as mentioned above, when the 2nd conveyance vehicle tries to go to a conveyance source, for example because the 2nd conveyance vehicle is too close to a conveyance source, it has passed the conveyance source (namely, stop). Is not in time). Therefore, the second transport vehicle that has received the transport notice can surely head for the transport source.
本発明の搬送システムの他の態様では、前記第1搬送車が受けている前記搬送予告以外の他の搬送予告を、前記第2搬送車が受けているか否かを検出する予告検出手段を更に備え、前記位置検出手段は、前記第2搬送車が前記他の搬送予告を受けている場合に、前記第1搬送車及び前記搬送元、並びに前記第2搬送車の位置に加えて、前記他の搬送予告に係る他の搬送元の位置を検出し、前記制御手段は、前記第2搬送車及び前記他の搬送元が、いずれも前記第1搬送車及び前記搬送元間に存在する場合に、前記第1搬送車に対する前記搬送予告及び前記第2搬送車に対する前記他の搬送予告を解除すると共に、前記第2搬送車に前記搬送予告を行うように、且つ前記第1搬送車に前記他の搬送予告を行うように前記搬送予告手段を制御する。 In another aspect of the transport system of the present invention, a notice detection unit for detecting whether or not the second transport vehicle receives a transport notice other than the transport notice received by the first transport vehicle is further provided. The position detection means, in addition to the position of the first transport vehicle, the transport source, and the second transport vehicle, when the second transport vehicle has received the other transport advance notice, The position of the other transport source related to the transport advance notice is detected, and the control means detects that the second transport vehicle and the other transport source are both between the first transport vehicle and the transport source. Canceling the conveyance advance notice for the first conveyance vehicle and the other conveyance advance notice for the second conveyance vehicle, and performing the conveyance advance notice for the second conveyance vehicle, The transportation notice means is controlled so as to make a transportation advance notice.
この態様によれば、制御手段によって搬送予告手段が制御される前に、予告検出手段によって、第1搬送車が受けている搬送予告以外の他の搬送予告を、第2搬送車が受けているか否かが検出される。即ち、第2搬送車が他の搬送予告に係る他の搬送元に向かっている、或いは他の搬送予告に係る他の搬送先に被搬送物を搬送中であることが検出される。 According to this aspect, before the conveyance notice means is controlled by the control means, whether the second conveyance vehicle receives a conveyance notice other than the conveyance notice received by the first conveyance vehicle by the notice detection means. Whether or not is detected. That is, it is detected that the second transport vehicle is heading for another transport source related to another transport advance notice or that the object to be transported is being transported to another transport destination related to another transport advance notice.
第2搬送車が他の搬送予告を受けている場合には、位置検出手段によって、第1搬送車及び搬送元、並びに第2搬送車の位置に加えて、他の搬送元の位置が検出される。そして、第2搬送車及び他の搬送元が、いずれも第1搬送車及び搬送元間に存在する場合には、制御手段によって、第1搬送車に対する搬送予告及び第2搬送車に対する他の搬送予告を解除すると共に、第2搬送車に搬送予告を行うように、且つ前1搬送車に他の搬送予告を行うように搬送予告手段が制御される。尚、「第1搬送車及び搬送元間」とは、第1搬送車が搬送元まで走行する走行経路を指している。即ち、本態様では、第1搬送車が搬送元まで走行する走行経路に、第2搬送車及び他の搬送予告における搬送元が存在する場合に、第1搬送車に対して行われていた搬送予告と、第2搬送車に対して行われていた他の搬送予告とが互いに入れ替えられた状態とされる。 When the second transport vehicle is notified of another transport, the position detection means detects the positions of other transport sources in addition to the positions of the first transport vehicle and the transport source and the second transport vehicle. The When both the second transport vehicle and the other transport source exist between the first transport vehicle and the transport source, the control means causes the transport advance notice for the first transport vehicle and the other transport to the second transport vehicle. In addition to canceling the advance notice, the advance notice means is controlled so that the advance notice is given to the second delivery vehicle and the other delivery notice is given to the previous delivery vehicle. Note that “between the first transport vehicle and the transport source” refers to a travel route along which the first transport vehicle travels to the transport source. That is, in this aspect, when the first transport vehicle travels to the transport source and the transport source in the second transport vehicle and other transport notices exists on the travel route, the transport that has been performed on the first transport vehicle is performed. The advance notice and the other advance notice for the second transport vehicle are replaced with each other.
第1搬送車に対して行われていた搬送予告と、第2搬送車に対して行われていた他の搬送予告とが互いに入れ替えられることにより、第1搬送車及び第2搬送車は、夫々効率よく搬送を行うことが可能となる。即ち、第1搬送車に行われていた搬送予告に係る搬送元には、より近い位置にいる第2搬送車が向かうようにし、第1搬送車を、それまで向かっていた搬送元より近い位置にある他の搬送予告に係る他の搬送元に向かうようにすることで、効率よく搬送を行うことが可能となる。 The first conveyance vehicle and the second conveyance vehicle are respectively replaced by the exchange advance notice that has been performed on the first conveyance vehicle and the other conveyance advance notice that has been performed on the second conveyance vehicle. It becomes possible to carry out efficiently. In other words, the second transport vehicle that is closer to the transport source related to the transport advance notice that has been performed on the first transport vehicle is directed toward the transport source, and the first transport vehicle is closer to the transport source that was approaching so far. It is possible to carry out the transfer efficiently by going to another transfer source related to the other transfer notice.
本発明の作用及び他の利得は次に説明する発明を実施するための最良の形態から明らかにされる。 The operation and other advantages of the present invention will become apparent from the best mode for carrying out the invention described below.
以下では、本発明の実施形態について図を参照しつつ説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
<第1実施形態>
先ず、第1実施形態に係る搬送システムの全体構成について、図1及び図2を参照して説明する。ここに図1は、第1実施形態に係る搬送システムの全体構成を概略的に示す上面図であり、図2は、ビークルの具体的な構成を示す斜視図である。
<First Embodiment>
First, the overall configuration of the transport system according to the first embodiment will be described with reference to FIGS. 1 and 2. FIG. 1 is a top view schematically showing the overall configuration of the transport system according to the first embodiment, and FIG. 2 is a perspective view showing a specific configuration of the vehicle.
図1において、第1実施形態に係る搬送システムは、軌道100と、複数のビークル200と、コントローラ300と、複数のステーション500とを備えて構成されている。
In FIG. 1, the transport system according to the first embodiment includes a
軌道100は、例えば天井に敷設されており、アルミニウムやステンレス等の金属から構成される。尚、ここでは説明の便宜上、軌道100の構成を極めて簡単なものとして図示しているが、実際の軌道100は、例えば分岐箇所において複数の分岐経路に分岐されるような複雑な構成とされてもよい。
The
ビークル200は、本発明の「搬送車」の一例であり、軌道100に沿って夫々走行することで、半導体基板等の被搬送物を搬送する。ビークル200は、例えばリニアモータを動力として、軌道100上を走行する。また、ビークル200の各々には識別番号が付与されており、例えば、後述するコントローラ300等によって、どのビークル200が、軌道100上におけるどの位置を走行中であるかを識別することが可能である。尚、ここではビークル200をビークル200a及びビークル200bの2台しか図示していないが、典型的には、より多く(例えば数十台、或いは数百台)のビークル200が軌道100上に備えられる。
The
図2において、ビークル200は、軌道100に吊下げられる形で取り付けられている。ビークル200によって、被搬送物であるFOUP400を移載する際には、ビークル本体220から、グリップ部240がステーション500上に配置されているFOUP400を把持できる位置まで下降する。グリップ部240は、複数のベルト230を介してビークル本体220と接続されており、ベルト230を巻き出し、或いは巻き取ることによって上昇及び下降が可能とされている。FOUP400がグリップ部240に把持されると、グリップ部240及び把持されたFOUP400がビークル本体220の位置まで上昇され、その後にビークル200の走行が開始される。
In FIG. 2, the
図1に戻り、コントローラ300は、例えばメモリや演算回路等を含んで構成されており、システム全体の動作を管理して制御するコントロールユニットである。コントローラ300は、搬送予告部310と、搬送終了検出部320と、位置検出部330と、制御部340とを有している。
Returning to FIG. 1, the
搬送予告部310は、本発明の「搬送予告手段」の一例であり、搬送元となるステーション500にビークルを呼び寄せるようにビークル200を制御する。搬送予告部310は、例えば無線や、軌道100に設けられた配線等を介して、軌道100上を走行するビークル200を夫々制御する。
The
搬送終了検出部320は、本発明の「変化検出手段」の一例であり、ビークル200の搬送状況を監視し、搬送が終了したことを検出する。搬送終了は、例えばFOUP400を積載していた状態から、FOUP400を積載していない状態へと変化した際に検出される。この場合は、上述した積載検出部350における結果を用いることで、容易に搬送終了を検出することができる。
The conveyance
位置検出部330は、本発明の「位置検出手段」の一例であり、ビークル200及び搬送元となるステーション500位置を夫々検出する。位置検出部は、検出した位置を用いることにより、ビークル200と搬送元となるステーション500との間の距離も検出することが可能である。
The
制御部340は、本発明の「制御手段」の一例であり、位置検出部330において検出された距離に応じて、搬送予告部310を制御する。制御の詳細については、後述する搬送システムの動作の説明において述べる。
The
ステーション500は、軌道100に沿って複数設けられており、夫々FOUP400を保管することが可能とされている。ステーション500は、図2に示したように、FOUP400を保管する単なる棚のようなものであってもよいし、FOUPに対する各種作業を行う装置等を備えた作業ステーションのようなものであってもよい。
A plurality of
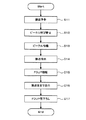
次に、第1実施形態に係る搬送システムの動作について図3及び図4を参照して説明する。ここに図3は、第1実施形態に係る搬送システムの全体的な動作の流れを示すフローチャートであり、図4は、第1実施形態に係る搬送システムにおける再配車の際の動作について示すフローチャートである。 Next, the operation of the transport system according to the first embodiment will be described with reference to FIGS. FIG. 3 is a flowchart showing the overall operation flow of the transport system according to the first embodiment, and FIG. 4 is a flowchart showing the operation during redistribution in the transport system according to the first embodiment. is there.
図3において、本実施形態に係る搬送システムの動作時には、先ず搬送予告部310(図1参照)が、一のビークル200に対して搬送予告を行う(ステップS11)。搬送予告は、典型的には、搬送元となるステーション500の近くを巡回中であるビークル200に対して行われる。尚、搬送予告は必ずしも全ての搬送作業に対して行われなくともよい。即ち、搬送予告が行われずに搬送指示が行われる場合があってもよい。具体的には、搬送元となるステーション500に極めて近い位置にビークル200が存在している場合であれば、搬送予告を行わずとも効率的な搬送作業が行える。搬送予告を受けたビークル200は、搬送元となるステーション500に呼び込まれ(ステップS12)、搬送指示が行われるまで呼び込まれたステーション500で待機させられる(ステップS13)。即ち、搬送指示が行われた際に、速やかにFOUP400を積載できるような状態とされる。
In FIG. 3, at the time of operation of the transport system according to the present embodiment, first, the transport notice unit 310 (see FIG. 1) makes a transport notice to one vehicle 200 (step S11). The conveyance advance notice is typically performed for the
搬送予告後には、搬送予告を行ったビークル200に対して、搬送指示が行われる(ステップS14)。具体的には、搬送指示部320は、ビークル200に対して、搬送元となるステーション500及び搬送先となるステーション500を伝達する。搬送元で待機していたビークル200は搬送指示に従い、搬送元であるステーション500に保管されているFOUP400を積載する(ステップS15)。FOUP400を積載したビークル200は、搬送先であるステーション500まで走行し(ステップS16)、FOUP400を荷下ろしする。
After the conveyance notice, a conveyance instruction is given to the
上述したような一連の処理が各ビークル200に対して夫々行われることにより、被搬送物であるFOUP400が各ステーション間で搬送される。但し、搬送予告が行われる際に、搬送先に呼び寄せるだけでなく、搬送先等を示す搬送指示が行われるようにしてもよい。
By performing a series of processes as described above for each
第1実施形態に係る搬送システムの動作時には、ビークル200による搬送終了が検出された際に所定の条件が満たされると、搬送予告を受けて搬送元となるステーション500へと向かっているビークル200に対する搬送予告が解除され、搬送が終了したビークル200に対して再び搬送予告が行われる(以下、このような動作を適宜「再配車」と称する)。
During the operation of the transport system according to the first embodiment, if a predetermined condition is satisfied when the end of transport by the
図4において、ビークル200の搬送終了が検出されると(ステップS21)、搬送予告済であるビークル200の各々に対して、搬送終了したビークル200が搬送予告を受け継ぐことができるか否かが判定される。この際には、先ず判定の対象となる搬送予告済のビークル200のうち、ビークル番号Vが“1”であるビークル200が対象とされる(ステップS22)。尚、ここでのビークル番号Vは、搬送予告済とされているビークル200の各々にふられている番号であるとする。以下では、判定の対象とされた搬送予告済のビークル200を第1ビークル、搬送終了が検出されたビークル200を第2ビークルとして説明する。
In FIG. 4, when the end of transport of the
第1ビークルが決定されると、位置検出部330は、第1ビークル及び第2ビークル、並びに搬送元であるステーション500の位置を夫々検出する(ステップS23)。ここで検出された位置から、第1ビークルから搬送元であるステーション500までの距離及び第2ビークルから搬送元であるステーション500までの距離が算出され、どちらがより搬送元であるステーションに500に近いかが判定される(ステップS24)。
When the first vehicle is determined, the
ここで、第1ビークルの方が搬送元であるステーション500に近い場合(ステップS24:NO)、搬送予告済のビークル200の中から、判定の対象となるビークル200(即ち、第2ビークル)が再び決定されることになる。具体的には、搬送予告済のビークル200の中に、まだ判定の対象とされていないビークル200が存在しているか否かが検出され(ステップS25)、判定の対象とされていないビークル200が存在していた場合(ステップS25:YES)、対象となるビークル番号がインクリメントされ(ステップS26)、対象となるビークル200が変化する。新たな第2ビークルが決定されると、再び夫々について位置検出が行われる(ステップS23)。一方、判定の対象とされていない搬送予告済ビークルが存在しない場合には(ステップS25:NO)、再配車に係る一連の処理は終了する。
Here, when the first vehicle is closer to the
第2ビークルの方が搬送元であるステーション500に近い場合(ステップS24:YES)、制御部340によって搬送予告部310が制御され、第1ビークルに行われていた搬送予告が解除されると共に(ステップS27)第2ビークルに対して、第1ビークルに行われていた搬送予告(即ち、解除された搬送予告)が行われる(ステップS28)。これにより、搬送元となるステーション500に対して、より近い第2ビークルに、第1ビークルに行われていた搬送予告が受け継がれることとなる。よって、搬送元となるステーション500にビークルが到達するまでの時間を短縮できる。
When the second vehicle is closer to the
尚、第1ビークルから搬送元までの距離及び第2ビークルから搬送元までの距離の差が殆どない場合には、典型的には、上述した第1ビークルの方が搬送元に近い場合(ステップS25及びステップS26)が行われる。但し、いずれの処理を行うか、及びどの程度の差が生じている場合に差が殆どないと判定するかは、システムの設計事項であり適宜設定することが可能である。 When there is almost no difference between the distance from the first vehicle to the transport source and the distance from the second vehicle to the transport source, typically, the first vehicle described above is closer to the transport source (step S25 and step S26) are performed. However, it is a design matter of the system and can be set as appropriate to determine which process is performed and to what extent a difference is generated.
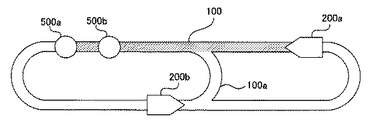
以下では、上述した再配車に係る動作について、図5及び図6に示す具体例を用いて説明する。ここに図5及び図6は夫々、第1実施形態に係る搬送システムにおけるビークルの位置関係の一例を示す上面図である。尚、図5及び図6では、説明の便宜上、図1に示した複数のステーション500のうち説明に必要となるもののみを図示している。
Below, the operation | movement which concerns on the above-mentioned reallocation is demonstrated using the specific example shown in FIG.5 and FIG.6. FIGS. 5 and 6 are top views showing examples of the positional relationship of the vehicles in the transport system according to the first embodiment. In FIGS. 5 and 6, for convenience of explanation, only those necessary for explanation among the plurality of
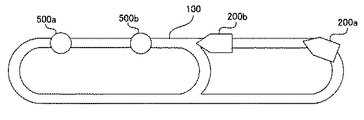
図5において、例えば第1ビークル200aは、搬送予告を受けて搬送元となるステーション500aに向かっており、第2ビークル200bは、搬送先であるステーション500bに向かってFOUP400を搬送中であるとする。
In FIG. 5, for example, it is assumed that the
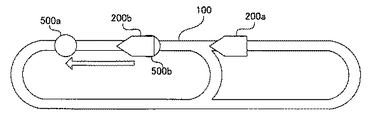
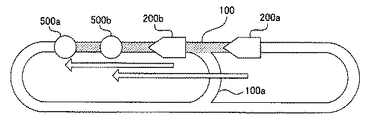
図6において、図5に示した第1ビークル200a及び第2ビークル200bが夫々走行し、第2ビークル200bの搬送が終了したとする。ここでの、2ビークル200bからステーション500aまでの距離は、第1ビークル200aからステーション500aまでの距離よりも短い。よって、第1ビークル200aに行われていた搬送予告は解除され、第2ビークル200bに行われる。この結果、第1ビークル200aは、搬送予告を受けていない巡回状態となり、第2ビークル200bは、搬送元であるステーション500aに呼び寄せられる。
In FIG. 6, it is assumed that the
以上説明したように、第1実施形態に係る搬送システムによれば、搬送予告を受けたビークル200が搬送元となるステーション500aに到達する時間を短縮できる。従って、より効率的な搬送が可能である。
As described above, according to the transport system according to the first embodiment, the time required for the
<第2実施形態>
次に、第2実施形態に係る搬送システムについて、図7から図11を参照して説明する。尚、第2実施形態は、上述の第1実施形態と比べて、再配車に関する構成及び再配車の際の動作が異なり、その他の構成及び動作については概ね同様である。このため第2実施形態では、第1実施形態と異なる部分について詳細に説明し、その他の重複する部分については適宜説明を省略する。
<Second Embodiment>
Next, a transport system according to the second embodiment will be described with reference to FIGS. Note that the second embodiment differs from the first embodiment described above in the configuration relating to relocation and the operation during relocation, and the other configurations and operations are generally the same. Therefore, in the second embodiment, portions different from the first embodiment will be described in detail, and descriptions of other overlapping portions will be omitted as appropriate.
先ず、第2実施形態に係る搬送システムの構成について、図7を参照して説明する。ここに図7は、第2実施形態に係る搬送システムの全体構成を概略的に示す上面図である。尚、図7では、図1に示した第1実施形態に係る構成要素と同様の構成要素に同一の参照符合を付している。 First, the configuration of the transport system according to the second embodiment will be described with reference to FIG. FIG. 7 is a top view schematically showing the overall configuration of the transport system according to the second embodiment. In FIG. 7, the same reference numerals are given to the same components as the components according to the first embodiment shown in FIG. 1.
図7において、第2実施形態に係る搬送システムにおけるコントローラは、搬送予告部310と、位置検出部330と、制御部340と、積載検出部350と、位置変化検出部360と、判定部370とを有している。
7, the controller in the transport system according to the second embodiment includes a
積載検出部350は、本発明の「積載検出手段」の一例であり、ビークル200がFOUP400を積載しているか否かを検出する。積載検出部350は、ビークル200が積載動作を行ったか否かによってFOUP400を積載しているか否かを検出するようなものであってもよいし、FOUP400を物理的に検出するセンサのようなものであってもよい。
The
位置変化検出部360は、本発明の「変化検出手段」の一例であり、ビークル200が軌道100における分岐箇所又は合流箇所を通過したことを、走行状態の変化として検出する。尚、位置変化検出360に加えて、第1実施形態において示した搬送終了検出部320(図1参照)が備えられてもよい。即ち、ビークル200が分岐箇所又は合流箇所を通過したことに加えて、搬送を終了したことを走行状態の変化として検出するようにしてもよい。
The position
判定部370は、積載検出部350や位置検出部340から得られた情報等に基づいて、ビークル200が搬送予告を受けられる状態であるか否かを判定する。判定部370は、例えばビークル200が搬送予告を受けているか否か、FOUP400を積載しているか否か、搬送元となるステーション500に対して近過ぎないかといった情報に基づいて判定を行う。
The
次に、第2実施形態に係る搬送システムの動作について、図8を参照して説明する。ここに図8は、第2実施形態に係る搬送システムにおける再配車の際の動作について示すフローチャートである。 Next, the operation of the transport system according to the second embodiment will be described with reference to FIG. FIG. 8 is a flowchart showing the operation at the time of redistribution in the transport system according to the second embodiment.
図8において、第2実施形態に係る搬送システムの動作時には、ビークル200が軌道100における分岐箇所又は合流箇所を通過したことが走行状態の変化として検出され(ステップS31)、搬送予告済であるビークル200の各々に対して、搬送終了したビークル200が搬送予告を受け継ぐことができるか否かが判定される。但し、ビークル200は、積載検出部350によって、夫々FOUP400を積載しているか否かが検出されており、ここではFOUP400を積載していないビークル200についてのみ分岐箇所又は合流箇所を通過したことが検出される。
In FIG. 8, at the time of the operation of the transport system according to the second embodiment, it is detected as a change in the running state that the
走行状態の変化が検出されると、上述した第1実施形態と同様に、第1ビークル及び第2ビークル、並びに搬送元であるステーション500の位置が検出され、搬送予告を受け継ぐビークル200が決定される(ステップS32〜ステップS36)。第2実施形態では特に、第1ビークルより第2ビークルの方が搬送元であるステーション500に近い場合に(ステップS35:YES)、判定部370によって、第2ビークルが搬送可能な状態であるか否かが判定される(ステップS37)。
When a change in the running state is detected, the positions of the first vehicle and the second vehicle and the
ここで、第2ビークルが搬送可能でないと判定されると(ステップS37:NO)、ステップS35及びステップS36の処理に戻り、新たな第2ビークルが決定される。一方、第2ビークルが搬送可能である判定されると(ステップS37:YES)、第1ビークルに行われていた搬送予告が解除されると共に(ステップS38)第2ビークルに対して、第1ビークルに行われていた搬送予告(即ち、解除された搬送予告)が行われる(ステップS39)。 Here, when it is determined that the second vehicle cannot be transported (step S37: NO), the process returns to step S35 and step S36, and a new second vehicle is determined. On the other hand, when it is determined that the second vehicle can be transported (step S37: YES), the transport advance notice performed on the first vehicle is canceled (step S38), and the first vehicle is compared with the second vehicle. The conveyance advance notice (that is, the canceled advance notice) that has been performed in step S39 is performed (step S39).
以下では、上述した再配車に係る動作について、図9及び図10に示す具体例を用いて説明する。ここに図9及び図10は夫々、第2実施形態に係る搬送システムにおけるビークルの位置関係の一例を示す上面図である。尚、図9及び図10では、説明の便宜上、図7に示した複数のステーション500のうち説明に必要となるもののみを図示している。
Below, the operation | movement which concerns on the re-allocation mentioned above is demonstrated using the specific example shown in FIG.9 and FIG.10. FIG. 9 and FIG. 10 are top views showing examples of the positional relationship of the vehicles in the transport system according to the second embodiment. In FIGS. 9 and 10, for convenience of explanation, only those necessary for explanation among the plurality of
図9において、第1ビークル200aが搬送元であるステーション500aに向かって走行しており、第2ビークル200bが、図に示す位置を巡回中であるとする。尚、この時点では、第2ビークル200bがこのまま直進するのか、或いは分岐した経路100aを走行するのかは決定されていない。
In FIG. 9, it is assumed that the
図10において、第2ビークル200bが分岐した経路100aを通過すると、第2ビークル200bは分岐箇所及び合流箇所を通過するので、第1ビークル200a及び第2ビークル200b、並びに搬送元であるステーション500aの位置が夫々検出される(但し、第2ビークル200bが直進した場合であっても、分岐箇所を通過したことになるので、位置検出は行われる)。この際、図に示すように、第2ビークル200bは第1ビークル200aの前を走行することになっているため、第2ビークル200bからステーション500aまでの距離は、第1ビークル200aからステーション500aまでの距離よりも短くなっている。よって、第1ビークル200aに行われていた搬送予告は解除され、第2ビークル200bに行われる。この結果、第1ビークル200aは、搬送予告を受けていない巡回状態となり、第2ビークル200bは、搬送元であるステーション500aに呼び寄せられる。
In FIG. 10, when the
上述したように、第2実施形態に係る搬送システムによれば、ビークル200の走行位置の変化に応じて再配車が行われる。よって、効果的にビークルの搬送元への到達時間を短縮できる。但し、走行位置の変化は、上述した分岐箇所及び合流箇所の通過以外の方法によって検出されてもよい。以下では、走行状態の変化の検出における変形例について、図11を参照して説明する。ここに図11は、複数のエリアを有する軌道の構成を示す上面図である。
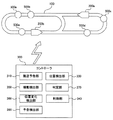
As described above, according to the transport system according to the second embodiment, the vehicle is relocated according to the change in the travel position of the
図11において、軌道100が図に示すように複数のエリア(第1エリア〜第6エリア)を有する場合には、ビークル200の走行は、例えばエリア毎に管理される。即ち、コントローラ300は、エリア毎に別々に各ビークル200の走行を制御する。この際、各エリアにおけるビークル200の台数は、互いに大きな差が出ないように、ある程度バランスがとられる。具体的には、ビークル200の数が多くなりすぎたエリアから、ビークル200の少ないエリアへビークル200が移動することで、ビークル200の台数バランスがとられる。
In FIG. 11, when the
エリア間でビークル200が移動すると、ビークル200が移動してきたエリアにおいては、それまで管理していなかった新たなビークル200が突然現われた状態となる。このため、搬送予告によって搬送元に向かうビークル200と比べて、より搬送元に近い位置にビークル200が存在することになり得る。よって、エリア間でのビークル200の移動を検出すれば、走行状態の変化を好適に検出できる。
When the
以上説明したように、第2実施形態に係る搬送システムによれば、上述した第1実施形態に係る搬送システムと同様に、搬送予告を受けたビークル200が搬送元となるステーション500aに到達する時間を短縮できる。従って、効率的な搬送が可能である。
As described above, according to the transport system according to the second embodiment, as with the transport system according to the first embodiment described above, the time for the
<第3実施形態>
次に、第3実施形態に係る搬送システムについて、図12から図15を参照して説明する。尚、第3実施形態は、上述の第1及び第2実施形態と比べて、再配車に関する構成及び再配車の際の動作が異なり、その他の構成及び動作については概ね同様である。このため第3実施形態では、第1及び第2実施形態と異なる部分について詳細に説明し、その他の重複する部分については適宜説明を省略する。
<Third Embodiment>
Next, a transport system according to the third embodiment will be described with reference to FIGS. Note that the third embodiment is different from the first and second embodiments described above in the configuration relating to relocation and the operation during relocation, and the other configurations and operations are generally the same. Therefore, in the third embodiment, portions different from those in the first and second embodiments will be described in detail, and description of other overlapping portions will be omitted as appropriate.
先ず、第3実施形態に係る搬送システムの構成について、図12を参照して説明する。ここに図12は、第3実施形態に係る搬送システムの全体構成を概略的に示す上面図である。尚、図12では、図1や図7に示した第1実施形態に係る構成要素と同様の構成要素に同一の参照符合を付している。 First, the configuration of the transport system according to the third embodiment will be described with reference to FIG. FIG. 12 is a top view schematically showing the overall configuration of the transport system according to the third embodiment. In FIG. 12, the same reference numerals are assigned to the same components as those according to the first embodiment shown in FIG. 1 and FIG.
図12において、第3実施形態に係る搬送システムにおけるコントローラ300は、搬送予告部310と、位置検出部330と、制御部340と、積載検出部350と、位置変化検出部360と、判定部370と、予告検出部380とを有している。
In FIG. 12, the
予告検出部380は、本発明の「予告検出手段」の一例であり、ビークル200が搬送予告を受けている状態であるか否かを検出する。予告検出部380は、例えば搬送予告部310が搬送予告を行ったビークル200を夫々管理しておくことで、ビークル200が搬送予告を受けている状態であるか否かを検出可能とされている。
The
次に、第3実施形態に係る搬送システムの動作について、図13を参照して説明する。ここに図13は、第3実施形態に係る搬送システムにおける再配車の際の動作について示すフローチャートである。 Next, the operation of the transport system according to the third embodiment will be described with reference to FIG. FIG. 13 is a flowchart showing the operation at the time of redistribution in the transport system according to the third embodiment.
図13において、第3実施形態に係る搬送システムの動作時には、上述した第2実施形態と同様に走行状態の変化が検出され(ステップS41)、判定の対象となる第2ビークルが決定される(ステップS42)。 In FIG. 13, during the operation of the transport system according to the third embodiment, a change in the traveling state is detected (step S41) as in the second embodiment described above, and the second vehicle to be determined is determined ( Step S42).
ここで第3実施形態では特に、予告検出部380によって、第2ビークルが第1ビークルに行われた搬送予告(以下、適宜「第1搬送予告」と称する)以外の他の搬送予告(以下、適宜「第2搬送予告」と称する)を受けているか否かが判定される(ステップS43)。第2ビークルが第2搬送予告を受けていると判定された場合には(ステップ43:YES)、ステップS44以降の処理に進む。一方、第2ビークルが第2搬送予告を受けていないと判定された場合には(ステップS43:NO)、ステップS33(図8参照)の処理へと進む。即ち、この場合は、第2実施形態に係る搬送システムと同様の処理が行われることとなる。
Here, in the third embodiment, in particular, the advance notice (hereinafter, referred to as “first advance notice” as appropriate) other than the advance notice (hereinafter, referred to as “first advance notice”) made by the advance
第2ビークルが第2搬送予告を受けていると判定されると、位置検出部330は、第1ビークル及び第2ビークル、並びに第1搬送予告に係る搬送元(以下、適宜「第1搬送元」と称する)及び第2搬送予告に係る搬送元(以下、適宜「第2搬送元」と称する)の位置を夫々検出する(ステップS44)。そして、検出された位置関係を用いて、第1ビークルと第1搬送元との間に、第2ビークル及び第2搬送元がいずれも存在しているか否かが判定される(ステップS45)。
When it is determined that the second vehicle has received the second conveyance notice, the
第1ビークルと第1搬送元との間に、第2ビークル及び第2搬送元がいずれも存在している場合には(ステップS45:YES)、ステップS48以降の処理に進む。一方、第1ビークルと第1搬送元との間に、第2ビークル及び第2搬送元のいずれも存在していない、或いはいずれか一方しか存在していない場合には(ステップS45:NO)、ステップS46及びステップS47の処理へと進み、新たな第2ビークルが決定される。 If both the second vehicle and the second transport source exist between the first vehicle and the first transport source (step S45: YES), the process proceeds to step S48 and subsequent steps. On the other hand, when neither the second vehicle nor the second transport source exists between the first vehicle and the first transport source, or only one of them exists (step S45: NO), Proceeding to step S46 and step S47, a new second vehicle is determined.
第1ビークルと第1搬送元との間に、第2ビークル及び第2搬送元がいずれも存在していると判定されると、判定部370によって、第2ビークルが搬送可能であるか否かが判定される(ステップS48)。ここで、第2ビークルが搬送可能でないと判定されると(ステップS48:NO)、ステップS46及びステップS47の処理へと戻り、新たな第2ビークルが決定される。一方、第2ビークルが搬送可能であると判定されると(ステップS48:YES)、第1ビークルに行われていた第1搬送予告及び第2ビークルに行われていた第2搬送予告が解除されると共に(ステップS49及びステップS50)、第2ビークルに対し第1搬送予告が行われ(ステップS51)、第1ビークルに対し第2搬送予告が行われる(ステップS52)。即ち、第1ビークル及び第2ビークル間で、搬送予告が入れ替えられた状態となる。
If it is determined that both the second vehicle and the second transport source exist between the first vehicle and the first transport source, the
以下では、上述した再配車に係る動作について、図14及び図15に示す具体例を用いて説明する。ここに図14及び図15は夫々、第3実施形態に係る搬送システムにおけるビークルの位置関係の一例を示す上面図である。尚、図14及び図15では、説明の便宜上、図3に示した複数のステーション500のうち説明に必要となるもののみを図示している。
Below, the operation | movement which concerns on the re-allocation mentioned above is demonstrated using the specific example shown in FIG.14 and FIG.15. FIGS. 14 and 15 are top views showing examples of the positional relationship of the vehicles in the transport system according to the third embodiment. 14 and 15, for convenience of explanation, only those necessary for explanation among the plurality of
図14において、第1ビークル200aは、第1搬送予告を受けて、第1搬送元であるステーション500aに向かって走行しており、第2ビークル200bは、第2搬送予告を受けて、第2搬送元であるステーション500bに向かって走行しているとする。この段階では、第1ビークル200aと第1搬送元であるステーション500aとの間には、第2ビークル200bは存在していない。
In FIG. 14, the
図15において、第2ビークル200bが分岐された経路100aを走行し、第1ビークルの前を走行することになったとすると、第1ビークル200aと第1搬送元であるステーション500aとの間には、第2ビークル200b及び第2搬送元であるステーション500bの両方が存在することになる。よって、この場合には、第1ビークル200a及び第2ビークル200bに行われた第1搬送予告及び第2搬送予告が夫々解除されると共に、第2ビークル200bに第1搬送予告が行われ、第1ビークル200aに第2搬送予告が行われる。これにより、第2ビークル200bは、ステーション500aに向かって走行することとなる。また、第1ビークル200aは、ステーション500bに向かって走行することとなる。
In FIG. 15, if the
上述したように、第1ビークル200aに対して行われていた第1搬送予告と、第2ビークル200bに対して行われていた第2搬送予告とが互いに入れ替えられることにより、第1ビークル200a及び第2ビークル200bは、夫々効率よく搬送を行うことが可能となる。具体的には、第1ビークル200aが向かっていた第1搬送元であるステーション500aには、より近い位置にいる第2ビークル200bが向かうように制御され、第1ビークル200aは、それまで向かっていた第1搬送元であるステーション500aより近い位置にある第2搬送元であるステーション500bに向かうように制御される。
As described above, the first conveyance notice performed for the
以上説明したように、第3実施形態に係る搬送システムによれば、第2ビークル500bが搬送予告を既に受けている場合であっても、第1ビークル500a及び第2ビークル500bを夫々好適に制御し、効率的に搬送を行うことが可能である。
As described above, according to the transport system according to the third embodiment, the
本発明は、上述した実施形態に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う搬送システムもまた本発明の技術的範囲に含まれるものである。 The present invention is not limited to the above-described embodiment, and can be appropriately changed without departing from the gist or concept of the invention that can be read from the claims and the entire specification. Moreover, it is included in the technical scope of the present invention.
100…軌道、200…ビークル、220…ビークル本体、230…ベルト、240…グリップ部、300…コントローラ、310…搬送予告部、320…搬送終了検出部320…位置検出部330…制御部340…積載検出部、360…位置変化検出部、370…判定部、380…予告検出部、400…FOUP、500…ステーション
DESCRIPTION OF
Claims (8)
該軌道上を夫々走行する複数の搬送車と、
前記複数の搬送車のうち一の搬送車を被搬送物の搬送元に呼び寄せる搬送予告を前記一の搬送車に対して行う搬送予告手段と、
前記一の搬送車以外の他の搬送車における走行状態の変化を検出する変化検出手段と、
前記一の搬送車とされた第1搬送車及び前記搬送元、並びに前記走行状態の変化が検出された第2搬送車の位置を夫々検出する位置検出手段と、
前記第2搬送車が前記第1搬送車と比べて前記搬送元に近い場合に、前記第1搬送車に対する前記搬送予告を解除すると共に、前記第2搬送車を新たに前記一の搬送車として前記第2搬送車に対して前記搬送予告を行うように前記搬送予告手段を制御する制御手段と
を備えることを特徴とする搬送システム。 Orbit,
A plurality of transport vehicles each traveling on the track;
A conveyance advance notice means for carrying out a conveyance advance notice for calling one conveyance vehicle of the plurality of conveyance vehicles to a conveyance source of the object to be conveyed;
A change detecting means for detecting a change in a running state in another transport vehicle other than the one transport vehicle;
Position detection means for respectively detecting the position of the first transport vehicle and the transport source that are the one transport vehicle, and the position of the second transport vehicle from which the change in the traveling state is detected;
When the second transport vehicle is closer to the transport source than the first transport vehicle, the transport advance notice for the first transport vehicle is canceled and the second transport vehicle is newly set as the first transport vehicle. And a control unit that controls the conveyance notice unit so as to perform the conveyance notice to the second conveyance vehicle.
前記変化検出手段は、前記他の搬送車の前記複数のエリア間の移動を、前記走行状態の変化として検出することを特徴とする請求項1から3のいずれか一項に記載の搬送システム。 The trajectory is configured to have a plurality of areas,
4. The transport system according to claim 1, wherein the change detection unit detects a movement of the other transport vehicle between the plurality of areas as a change in the traveling state. 5.
前記変化検出手段は、前記他の搬送車のうち前記被搬送物を積載していない搬送車について、前記走行状態の変化を検出する
ことを特徴とする請求項1から4のいずれか一項に記載の搬送システム。 A load detecting means for detecting that the other transport vehicle is loading the object to be transported;
5. The change detection unit according to claim 1, wherein the change detection unit detects a change in the traveling state of a transport vehicle that is not loaded with the object to be transported among the other transport vehicles. The transport system described.
前記制御手段は、前記第2搬送車が前記搬送予告を受けることができないとされた場合に、前記搬送予告手段を制御しない
ことを特徴とする請求項1から5のいずれか一項に記載の搬送システム。 A determination means for determining whether or not the second conveyance vehicle can receive the conveyance advance notice;
6. The control unit according to claim 1, wherein the control unit does not control the conveyance notice unit when the second conveyance vehicle cannot receive the conveyance notice. 6. Conveying system.
前記位置検出手段は、前記第2搬送車が前記他の搬送予告を受けている場合に、前記第1搬送車及び前記搬送元、並びに前記第2搬送車の位置に加えて、前記他の搬送予告に係る他の搬送元の位置を検出し、
前記制御手段は、前記第2搬送車及び前記他の搬送元が、いずれも前記第1搬送車及び前記搬送元間に存在する場合に、前記第1搬送車に対する前記搬送予告及び前記第2搬送車に対する前記他の搬送予告を解除すると共に、前記第2搬送車に前記搬送予告を行うように、且つ前記第1搬送車に前記他の搬送予告を行うように前記搬送予告手段を制御する
ことを特徴とする請求項1から7のいずれか一項に記載の搬送システム。 Further comprising notice detection means for detecting whether or not the second transport vehicle receives a transport notice other than the transport notice received by the first transport vehicle;
When the second transport vehicle has received the other transport notice, the position detection means is configured to add the other transport in addition to the positions of the first transport vehicle, the transport source, and the second transport vehicle. Detect the location of other transport sources related to the notice,
The control means is configured such that when the second transport vehicle and the other transport source are both present between the first transport vehicle and the transport source, the transport advance notice and the second transport are performed on the first transport vehicle. Canceling the other transportation advance notice for the vehicle, and controlling the transportation advance notice means so as to make the second transportation vehicle make the transportation advance notice, and to make the other transportation advance notice to the first transportation vehicle. The conveyance system according to any one of claims 1 to 7, wherein
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232123A JP5374981B2 (en) | 2008-09-10 | 2008-09-10 | Transport system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008232123A JP5374981B2 (en) | 2008-09-10 | 2008-09-10 | Transport system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010066965A true JP2010066965A (en) | 2010-03-25 |
| JP5374981B2 JP5374981B2 (en) | 2013-12-25 |
Family
ID=42192505
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008232123A Active JP5374981B2 (en) | 2008-09-10 | 2008-09-10 | Transport system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5374981B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090334A1 (en) * | 2015-11-27 | 2017-06-01 | 村田機械株式会社 | Transport system and transport method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05324064A (en) * | 1992-05-26 | 1993-12-07 | Toshiba Corp | Orbital truck controller |
| JP2002006951A (en) * | 2000-06-16 | 2002-01-11 | Murata Mach Ltd | Orbital bogie system |
| JP2002332105A (en) * | 2001-05-09 | 2002-11-22 | Murata Mach Ltd | Automated guided vehicle system |
-
2008
- 2008-09-10 JP JP2008232123A patent/JP5374981B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05324064A (en) * | 1992-05-26 | 1993-12-07 | Toshiba Corp | Orbital truck controller |
| JP2002006951A (en) * | 2000-06-16 | 2002-01-11 | Murata Mach Ltd | Orbital bogie system |
| JP2002332105A (en) * | 2001-05-09 | 2002-11-22 | Murata Mach Ltd | Automated guided vehicle system |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090334A1 (en) * | 2015-11-27 | 2017-06-01 | 村田機械株式会社 | Transport system and transport method |
| CN108290684A (en) * | 2015-11-27 | 2018-07-17 | 村田机械株式会社 | Transport system and carrying method |
| JPWO2017090334A1 (en) * | 2015-11-27 | 2018-11-01 | 村田機械株式会社 | Transport system and transport method |
| TWI676582B (en) * | 2015-11-27 | 2019-11-11 | 日商村田機械股份有限公司 | Transfer system and transfer method |
| US10479613B2 (en) | 2015-11-27 | 2019-11-19 | Murata Machinery, Ltd. | Transport system and transport method |
| CN108290684B (en) * | 2015-11-27 | 2020-06-23 | 村田机械株式会社 | Conveying system and conveying method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5374981B2 (en) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI731185B (en) | Article transport facility | |
| JP4337683B2 (en) | Transport system | |
| JP4366663B2 (en) | Conveyor cart system | |
| US9086697B2 (en) | Processing facility | |
| JP2003146412A (en) | Transfer system | |
| JP4766111B2 (en) | Transport vehicle system | |
| EP3848769B1 (en) | Conveyance vehicle system | |
| CN108394672B (en) | Article carrying apparatus | |
| JP2005243729A (en) | Conveyer system | |
| JP5374981B2 (en) | Transport system | |
| JP2005029319A (en) | Conveying system | |
| JP2008230843A (en) | Control method for carriage | |
| JP2010067146A (en) | Transfer system | |
| JP2010006478A (en) | Traveling system | |
| JP2002087539A (en) | Carrying system | |
| JP2010097998A (en) | Transportation system | |
| US20230373733A1 (en) | Article Transport Facility | |
| JP2011162329A (en) | Cargo carrying method of cargo carrying system | |
| JP5229622B2 (en) | Transport vehicle system | |
| JP2005162451A (en) | Conveying system | |
| TW202325629A (en) | storage system | |
| TW202408909A (en) | Article transport facility | |
| JP2002332105A (en) | Automated guided vehicle system | |
| JP2008108031A (en) | Article carrier system | |
| JP3995085B2 (en) | Loop transfer system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110803 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20120420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120904 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5374981 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |