JP2010054430A - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP2010054430A JP2010054430A JP2008221516A JP2008221516A JP2010054430A JP 2010054430 A JP2010054430 A JP 2010054430A JP 2008221516 A JP2008221516 A JP 2008221516A JP 2008221516 A JP2008221516 A JP 2008221516A JP 2010054430 A JP2010054430 A JP 2010054430A
- Authority
- JP
- Japan
- Prior art keywords
- light
- detection
- reflected
- reflection
- reflecting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
- G01S7/4813—Housing arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Transform (AREA)
Abstract
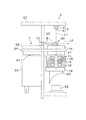
【解決手段】位置検出手段1は、回転可能なビームスプリッタ50により、光源2からの検出光L1の少なくとも一部を空間に向けて投射すると共に、検出物体からの反射光を、凹面鏡20及びフォトダイオード25を用いて検出している。さらに、フォトダイオード25とは異なる位置に受光センサ10が設けられており、ビームスプリッタ50が所定の回転位置となったときには、ビームスプリッタ50に入射した検出光の少なくとも一部が導光手段によって導かれ、受光センサ10に受光される。そして、この受光センサ10による検出結果に基づいて、ビームスプリッタ50の回転位置が検出される。
【選択図】図1
Description
前記光源からの前記検出光の少なくとも一部を空間に向けて反射する反射面を備えた投光側反射手段と、前記投光側反射手段を所定の中心軸を中心として回転させる回転機構と、前記回転機構を駆動する駆動手段と、前記空間に位置する検出物体からの反射光を受光する第1の受光手段と、前記投光側反射手段の前記反射面にて反射された前記検出光が前記検出物体に照射されたときに、当該検出物体からの前記反射光を前記第1の受光手段に向けて反射する受光側反射手段と、前記投光側反射手段が所定の回転位置となったときに、当該投光側反射手段の前記反射面にて反射された前記検出光、又は前記反射面を透過した前記検出光を、前記第1の受光手段に導く導光手段と、前記第1の受光手段による検出結果に基づき、前記投光側反射手段の回転位置を検出する回転位置検出手段と、を備えたことを特徴とする。
以下、本発明の位置検出装置を具現化した第1実施形態について、図面を参照して説明する。
図1は、本発明の第1実施形態に係る位置検出装置の要部を概略的に示す概略図である。図2は、図1の位置検出装置の伝達機構を説明する説明図である。図3は、図1の位置検出装置において、検出光がビームスプリッタで分岐する様子を説明する説明図であり、図4は、図3の状態からビームスプリッタが180°回転した状態を説明する説明図である。
本実施形態では、ビームスプリッタ50が「投光側反射手段」の一例に相当する。
なお、フォトダイオード25は、「第1の受光手段」の一例に相当する。また、凹面鏡20は、「受光側反射手段」の一例に相当する。
本実施形態に係る位置検出装置1では、ビームスプリッタ50が所定の回転位置(図1、図3)になったときに検出光L3が光ファイバ8に入射し、受光センサ10によって受光されるようになっており、このような受光がなされる回転位置(受光センサ10が検出光L3を受光する回転位置)を基準位置として回転位置の検出が行われる。
本実施形態に係る位置検出装置1は、ビームスプリッタ50が所定の回転位置となったときに、当該ビームスプリッタ50の反射面51aを透過した検出光を、受光センサ10に導く第2の反射部52及び光ファイバ8が設けられているため、ビームスプリッタ50が所定の回転位置となる毎に受光センサ10にて検出光L3が良好に受光されるようになり、回転位置検出の基準となる基準位置を複雑な構成を用いることなく簡易に検出できるようになる。そして、このような受光センサ10での受光結果(即ち、基準位置検出結果)に基づいてビームスプリッタ50の回転位置検出がなされるため、ビームスプリッタ50の回転位置を検出するための構成がより小型かつ簡易なものとなり、ひいては装置全体の小型化、軽量化を効果的に図ることができる。
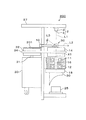
次に第2実施形態について説明する。図5は、第2実施形態に係る位置検出装置200の要部を概略的に例示する概略図である。なお、第2実施形態に係る位置検出装置200は、モータ30の駆動軸31にロータリエンコーダが取り付けられている点が第1実施形態と異なっており、それ以外は第1実施形態と同様である。
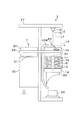
次に、第3実施形態について説明する。図6は、第3実施形態に係る位置検出装置300の要部を概略的に例示する概略図である。第3実施形態の位置検出装置300は、構成的には、ビームスプリッタ50をミラー60に変更した点のみが第1実施形態と異なり、それ以外は第1実施形態と同様である。よって同様の部分については第1実施形態と同一の符号を付し、詳細な説明は省略する。
次に、第4実施形態について説明する。図7は、第4実施形態に係る位置検出装置400の要部を概略的に例示する概略図である。第4実施形態の位置検出装置400は、構成的には、受光センサ10を省略した点、ファイバ8の光導出部がフォトダイオード25付近となるようにファイバ8を延ばした点のみが第3実施形態と異なり、それ以外は第3実施形態と同様である。よって同様の部分については第3実施形態と同一の符号を付し、詳細な説明は省略する。
本発明は上記記述及び図面によって説明した実施形態に限定されるものではなく、例えば次のような実施形態も本発明の技術的範囲に含まれる。
2…光源
5…回転機構
7…伝達機構
8…ファイバ(導光部材、導光手段)
10…受光センサ(第2の受光手段)
20…凹面鏡(受光側反射手段)
25…フォトダイオード(第1の受光手段)
27…制御基板(回転位置検出手段)
30…モータ(駆動手段)
31…駆動軸
50…ビームスプリッタ(投光側反射手段)
51…第1の反射部
51a…反射面
52…第2の反射部(導光手段)
60…ミラー(投光側反射手段)
408…ファイバ(導光手段)
X1…中心軸
Claims (9)
- 指向性を有する検出光を発する光源と、
前記光源からの前記検出光の少なくとも一部を空間に向けて反射する反射面を備えた投光側反射手段と、
前記投光側反射手段を所定の中心軸を中心として回転させる回転機構と、
前記回転機構を駆動する駆動手段と、
前記空間に位置する検出物体からの反射光を受光する第1の受光手段と、
前記投光側反射手段の前記反射面にて反射された前記検出光が前記検出物体に照射されたときに、当該検出物体からの前記反射光を前記第1の受光手段に向けて反射する受光側反射手段と、
前記投光側反射手段から発せられる前記検出光を受光する第2の受光手段と、
前記投光側反射手段が所定の回転位置となったときに、当該投光側反射手段の前記反射面にて反射された前記検出光、又は前記反射面を透過した前記検出光を、前記第2の受光手段に導く導光手段と、
前記第2の受光手段による検出結果に基づき、前記投光側反射手段の回転位置を検出する回転位置検出手段と、
を備えたことを特徴とする位置検出装置。 - 前記受光側反射手段は、凹面鏡からなることを特徴とする請求項1に記載の位置検出装置。
- 前記導光手段は、前記投光側反射手段が前記所定の回転位置となったときに、当該投光側反射手段から発せられる前記検出光の経路上に位置し、且つ当該導光手段に入射する前記検出光を前記第2の受光手段に導く導光部材を有してなることを特徴とする請求項1又は請求項2に記載の位置検出装置。
- 前記導光部材は、光ファイバからなることを特徴とする請求項3に記載の位置検出装置。
- 前記導光部材は、屈折率の異なる複数の複数材料を組み合わせてなる光導波路からなることを特徴とする請求項3に記載の位置検出装置。
- 前記投光側反射手段は、当該投光側反射手段に入射する前記検出光の一部を前記反射面にて反射する第1の反射部と、前記反射面を透過する前記検出光を前記反射面とは異なる方向に反射する第2の反射部と、を有するビームスプリッタからなり、
前記導光手段は、前記第2の反射部を有してなることを特徴とする請求項1から請求項5のいずれか一項に記載の位置検出装置。 - 前記ビームスプリッタが前記所定の回転位置となったときに前記第2の反射部にて反射した前記検出光が前記第2の受光手段で受光され、
前記ビームスプリッタが前記所定の回転位置とは異なる第2の回転位置となったときに前記第1の反射部にて反射した前記検出光が前記第2の受光手段で受光されることを特徴とする請求項6に記載の位置検出装置。 - 前記受光側反射手段は、前記投光側反射手段と連結され、当該投光側反射手段と共に前記中心軸を中心として回転する構成をなし、
前記モータは、前記中心軸と異なる位置で回転する駆動軸を有し、
前記受光側反射手段と前記投光側反射手段とが一体化してなる投受光ユニットに対し、前記駆動軸の駆動力を伝達する伝達機構が設けられていることを特徴とする請求項1から請求項7のいずれか一項に記載の位置検出装置。 - 指向性を有する検出光を発する光源と、
前記光源からの前記検出光の少なくとも一部を空間に向けて反射する反射面を備えた投光側反射手段と、
前記投光側反射手段を所定の中心軸を中心として回転させる回転機構と、
前記回転機構を駆動する駆動手段と、
前記空間に位置する検出物体からの反射光を受光する第1の受光手段と、
前記投光側反射手段の前記反射面にて反射された前記検出光が前記検出物体に照射されたときに、当該検出物体からの前記反射光を前記第1の受光手段に向けて反射する受光側反射手段と、
前記投光側反射手段が所定の回転位置となったときに、当該投光側反射手段の前記反射面にて反射された前記検出光、又は前記反射面を透過した前記検出光を、前記第1の受光手段に導く導光手段と、
前記第1の受光手段による検出結果に基づき、前記投光側反射手段の回転位置を検出する回転位置検出手段と、
を備えたことを特徴とする位置検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221516A JP4579321B2 (ja) | 2008-08-29 | 2008-08-29 | 位置検出装置 |
| US12/461,480 US8045182B2 (en) | 2008-08-29 | 2009-08-13 | Location detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221516A JP4579321B2 (ja) | 2008-08-29 | 2008-08-29 | 位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010054430A true JP2010054430A (ja) | 2010-03-11 |
| JP4579321B2 JP4579321B2 (ja) | 2010-11-10 |
Family
ID=41724989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008221516A Expired - Fee Related JP4579321B2 (ja) | 2008-08-29 | 2008-08-29 | 位置検出装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8045182B2 (ja) |
| JP (1) | JP4579321B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013545976A (ja) * | 2010-10-25 | 2013-12-26 | 株式会社ニコン | 装置、光学アセンブリ、物体を検査又は測定する方法、及び構造体を製造する方法 |
| KR20190086420A (ko) * | 2019-07-11 | 2019-07-22 | 전자부품연구원 | 오목 반사 미러를 가지는 스캐닝 라이다 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102410836B (zh) * | 2011-07-26 | 2014-01-29 | 清华大学 | 基于二维位置敏感传感器的空间六自由度物体定位系统 |
| JP7427487B2 (ja) * | 2020-03-24 | 2024-02-05 | キヤノン株式会社 | 光学装置、車載システム、および移動装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08122061A (ja) * | 1994-10-21 | 1996-05-17 | Mitsubishi Electric Corp | 障害物検知装置 |
| JPH10132934A (ja) * | 1996-10-29 | 1998-05-22 | Mitsubishi Electric Corp | 車両用光レーダ装置 |
| JP2006349449A (ja) * | 2005-06-15 | 2006-12-28 | Hokuyo Automatic Co | 走査型レンジセンサ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3875665B2 (ja) * | 2003-07-31 | 2007-01-31 | 北陽電機株式会社 | スキャニング型レンジセンサ |
| JP4160611B2 (ja) | 2006-09-13 | 2008-10-01 | 北陽電機株式会社 | 走査式測距装置 |
| JP4098341B1 (ja) * | 2006-12-28 | 2008-06-11 | 北陽電機株式会社 | 走査式測距装置の光学窓汚れ検出装置 |
-
2008
- 2008-08-29 JP JP2008221516A patent/JP4579321B2/ja not_active Expired - Fee Related
-
2009
- 2009-08-13 US US12/461,480 patent/US8045182B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08122061A (ja) * | 1994-10-21 | 1996-05-17 | Mitsubishi Electric Corp | 障害物検知装置 |
| JPH10132934A (ja) * | 1996-10-29 | 1998-05-22 | Mitsubishi Electric Corp | 車両用光レーダ装置 |
| JP2006349449A (ja) * | 2005-06-15 | 2006-12-28 | Hokuyo Automatic Co | 走査型レンジセンサ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013545976A (ja) * | 2010-10-25 | 2013-12-26 | 株式会社ニコン | 装置、光学アセンブリ、物体を検査又は測定する方法、及び構造体を製造する方法 |
| KR20190086420A (ko) * | 2019-07-11 | 2019-07-22 | 전자부품연구원 | 오목 반사 미러를 가지는 스캐닝 라이다 |
| KR102145931B1 (ko) * | 2019-07-11 | 2020-08-20 | 전자부품연구원 | 오목 반사 미러를 가지는 스캐닝 라이다 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4579321B2 (ja) | 2010-11-10 |
| US20100053637A1 (en) | 2010-03-04 |
| US8045182B2 (en) | 2011-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100365433C (zh) | 扫描测距仪 | |
| JP4088906B2 (ja) | 測量機の受光装置 | |
| JP5310098B2 (ja) | レーザ距離測定装置 | |
| JP5598831B2 (ja) | 走査式測距装置 | |
| JP2014071038A (ja) | レーザレーダ装置 | |
| EP2381272B1 (en) | Laser scanner | |
| US20110235018A1 (en) | Scanning-type distance measuring apparatus | |
| JP2009236774A (ja) | 三次元測距装置 | |
| WO2014010107A1 (ja) | 走査式測距装置 | |
| JP2010243491A (ja) | トランジットタイム原理に基づいて動作する光学センサ | |
| CN108627846B (zh) | 距离测量装置 | |
| JPH08510328A (ja) | 物体の寸法測定装置 | |
| JP2008070199A (ja) | 走査式測距装置 | |
| JP2013205414A (ja) | 監視領域内の対象物を検知するための光電センサおよび方法 | |
| JP4579321B2 (ja) | 位置検出装置 | |
| KR101556866B1 (ko) | 거리 측정 장치 | |
| JP2007170917A (ja) | 光走査装置および被測定物検出装置 | |
| JP5929675B2 (ja) | レーザレーダ装置 | |
| KR100976338B1 (ko) | 광섬유를 이용한 양방향 광모듈 및 이를 이용한 레이저거리 측정장치 | |
| JP2018151278A (ja) | 計測装置 | |
| KR20210009119A (ko) | 차량용 라이다 장치 | |
| JP2010151788A (ja) | レーザレーダ装置 | |
| JP6554464B2 (ja) | 距離測定装置およびその距離測定開始点探索方法 | |
| JP2014071028A (ja) | レーザレーダ装置 | |
| KR20050072340A (ko) | 변위와 각도 변화를 동시에 측정하기 위한 방법과 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100608 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100824 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100825 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130903 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |