JP2010051782A - 信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 - Google Patents
信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 Download PDFInfo
- Publication number
- JP2010051782A JP2010051782A JP2009051886A JP2009051886A JP2010051782A JP 2010051782 A JP2010051782 A JP 2010051782A JP 2009051886 A JP2009051886 A JP 2009051886A JP 2009051886 A JP2009051886 A JP 2009051886A JP 2010051782 A JP2010051782 A JP 2010051782A
- Authority
- JP
- Japan
- Prior art keywords
- correlation
- scanning line
- waveform data
- value
- signal processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8977—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using special techniques for image reconstruction, e.g. FFT, geometrical transformations, spatial deconvolution, time deconvolution
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52073—Production of cursor lines, markers or indicia by electronic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0825—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of the breast, e.g. mammography
Abstract
【解決手段】信号処理装置は、被検体内部に弾性波のビームを走査して複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う。この信号処理装置は、第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関値算出部(009)と、前記走査線上の複数の位置の中から、相関値が所定の値と異なる値となる位置を、特異領域が存在し得る位置として抽出する相関変化位置抽出部(010)と、を備える。
【選択図】図4
Description
石の後方側、つまり探触子から遠い側、より深い部位の画像に音響陰影が生じているかどうかによって、結石を検出する手法である。なお音響陰影とは高反射体の後方には超音波パルスが届かず、また受信ビームが高反射体で遮られるため、高反射体の後方の画像が形成されず生じる影の部分である。
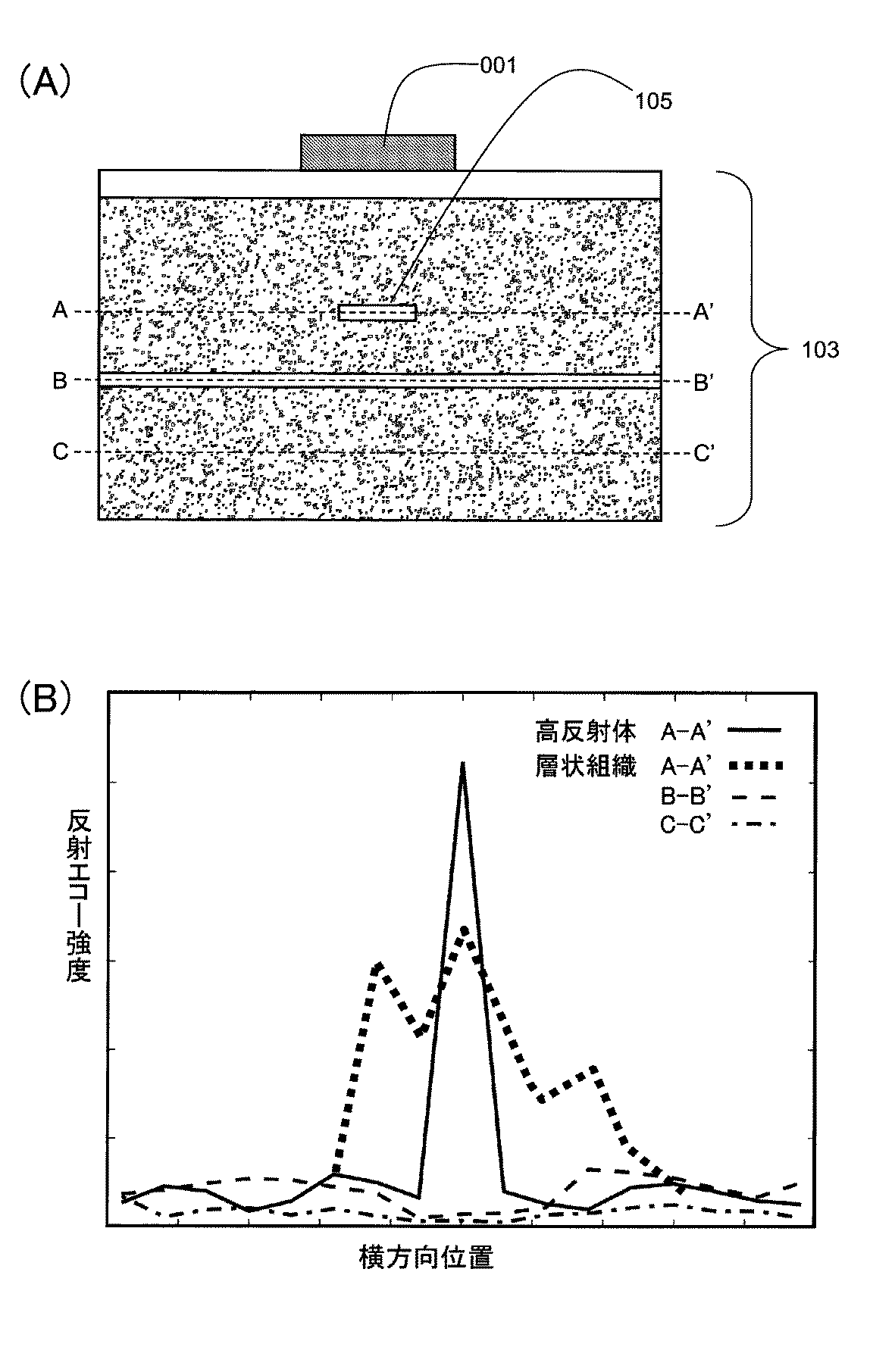
射体104を設置したものである。模擬的な組織103の上面に超音波探触子001を設置し、超音波の送受信を行なう。図2A中のA−A´、B−B´、C−C´の深さからの反射エコー強度を模式的にプロットしたグラフが図2Bである。図2Bのグラフ中、横軸の中央付近に高反射体が設置されている。グラフを見て分かるように高反射体からのエコーは周辺組織の反射エコーから突出している。次に、図3Aは、高反射体を設置せずに層状の組織105を設置した模擬的な組織103である。層状の組織105は高反射体よりも反射率が低く設定されている。図3A中のA−A´、B−B´、C−C´の深さからの反射エコー強度を模式的にプロットしたグラフが図3Bである。図3Bのグラフ中、凡例「高反射体A−A´」で示される実線は、図2Bの高反射体からの反射エコー強度を重ねてプロットしたものである。このグラフを見て分かるように、反射率の低い層状の組織からの反射エコー強度であっても、反射率の高い高反射体からの反射エコー強度と同程度の強度を有している。このように、反射エコーの強度のみでは高反射体が存在するのかそうでないのかを判別することは難しい。即ち高反射体が存在しない場合でもある程度の強度を有する信号が検出される場合がある。
鑑別する鑑別部と、を備えることを特徴とするものである。
層像を形成するために信号処理を行う信号処理装置の制御方法であって、第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について算出する走査線間相関算出工程と、所定の深さについて算出された相互相関値の走査方向の分布に対して、所定サイズの特異領域の両端に落ち込みを持つ第1の分布形状を前記特異領域の中心位置に落ち込みを持つ第2の分布形状へと変換する変換処理工程と、前記変換処理工程による処理の結果を用いて特異領域が存在し得る位置を推定する推定工程と、を含むことを特徴とするものである。
検出が可能である。発明者らの知見によれば、例えば、0.5程度の相互相関を有する走
査線同士であっても高反射体の検出が可能である。
g=Hf
なお、変換行列Hはビーム幅と高反射体のサイズに応じて変化する行列である。想定される高反射体のサイズに対応するフィルタリングパラメータを与えることで、変換行列Hを算出することが可能である。また異なるサイズに対応したフィルタリングパラメータを用いて、各サイズに対応した変換行列Hを算出することができる。なお、想定する高反射体のサイズは2mm以下が好ましいが、2mm以上のサイズに対応するパラメータを設定することも可能である。
体の両端に落ち込みを持つ第1の関数(第1の分布形状)へ変換する処理の逆変換を、上記相互相関値分布gに対して適用する処理ということもできる。このように、複数の走査線から算出された相互相関値分布gに対して相関フィルタリング処理を適用することにより、高反射体の存在位置を明確化することができる。
とする各種逆フィルタの設計手法によるフィルタ処理が適用可能である。また単純なパターンマッチングの手法を用いることも可能である。
以下、実施例1では隣接する走査線の相互相関を算出し、相関が設定値以下になる位置情報を示す超音波装置について説明する。
まず、図4を用いて断層像を表示するまでの流れを説明する。本実施例の超音波装置は複数の振動子002を有する超音波探触子001が接続されたシステムである。超音波を送信する位置(送信フォーカス)が設定されると、システム制御部004から送信回路系003にその設定情報が送られる。送信回路系003はその情報に基づいて、時間遅延ならびに強度を決定した後、超音波探触子001内の複数の振動子002を駆動するための電気信号を送信する。この電気信号は振動子002において変位に変換され、被検体内部を超音波として伝播する。このようにして送信された超音波は被検体内で直線的な音圧分布を形成する。これを送信ビームと呼ぶ。被検体内を伝播した超音波は被検体内の音響的性質により散乱・反射されたエコーとして振動子002に戻ってくる。このエコーが振動子002により電気信号に変換され、受信回路系005に入力される。受信回路系005では、システム制御部004から与えられた受信フォーカス位置に関する情報を元に時間遅延量を算出し、入力された時系列の電気信号に対して時間遅延処理を行なった後、それらを加算する。この処理によって被検体内の受信フォーカス位置における反射波(反射エコーともいう)を選択的に抽出することが出来る。このような処理によって形成される受信感度を有する領域を送信ビームに対して受信ビームと称する。
対して必要であればバンドパスフィルタなどのフィルタ処理を行なった後、データの包絡線を検出し強度データとして出力する。この強度データは画像処理系(画像処理部)007に送信される。画像処理系007は、システム制御部004から送られた送信ビームならびに受信ビームの位置情報と強度データとを使用して、表示画像のピクセルに合わせてデータを間引き、丸め、若しくは補間し、観察領域内の各位置での輝度信号を生成する。このような一連の動作によって1本の走査線に対する画像が形成される。送信ビームと受信ビームの方向や位置を変化させ、再度同様な処理を行なうことによって被検体内の違う領域に走査線を形成する。このようにして観察領域内に複数本の走査線を形成することで観察領域の断層像を形成することが可能となる。画像処理系007は、このようにして得られた断層像を画像表示装置008に送信し表示する。
次に、図4から図6を用いて、高反射体を検出し、その存在位置の候補を表示するための処理について説明する。
低下した位置とみなしてもよい。本実施例では後者の判定手法を採用する。以下詳しく述べる。
候補を抽出できることを意味している。
以下、実施例2では、高反射体の位置検出に隣接走査線間の相互相関だけでなく、強度も使用する場合の例について説明を行なう。
以下、実施例3では隣接する走査線の受信波形データから相互相関値を算出し、高反射体の存在位置候補を抽出し、さらに隣接する走査線の強度比から高反射体の物性値を推定する超音波装置について説明する。
度との比を取ることにより、減衰による影響を抑制することが可能となる。
R=|(Z2−Z1)/(Z2+Z1)|2
である。それぞれの組成を有する結石のエネルギー透過率T(=1−R)は、生体の平均
的音響インピーダンスを約1.5kg/m2・sとすると、それぞれ77.6%、48.2%となる。結石よりも深い位置から戻ってくる反射エコーは、結石の界面を4回透過することとなり、T4で求めることができ、それぞれ36.3%、54%のエネルギーとなる。このように、結石であっても組成が違う場合、反射エコーの強度が変化することが分かる。
以下、実施例4では高反射体の位置候補によって送信フォーカスを変化させる超音波装置について述べる。図11Aは本実施例の超音波装置のシステム概念図であり、図11Bは図11Aのハッチング領域の構成を詳しく示す図である。断層像を表示するところは、前述の実施例と同様であるため省略する。本実施例では相関変化位置抽出部023によって算出された位置情報をシステム制御部004に出力する(図中では矢印031で表示)。この位置情報を入力されたシステム制御部004はその位置に送信フォーカスを設定した走査線を形成するように送信回路系003に信号を送信する。このように設定された走査線の受信波形データは再度走査線間相関算出部021に入力され、物性算出部022によって物性が算出される。
実施例5では、特異領域である高反射体の位置をさらに精度良く抽出できる超音波装置について述べる。
ィルタリング処理した結果(の極小値)が閾値以下であれば、相関フィルタリング処理部050は、その位置情報を画像処理系007に送信する。画像処理系007は、その位置情報を断層像に重畳して画像表示装置008に表示する。なお、相関フィルタリング処理部050は、相関フィルタリング処理した結果の平均値からその標準偏差のX倍を減じた値を上記閾値として用いることができる。このXの値は不図示の制御画面においてユーザが変更することも可能である。Xの値を小さくすれば、より高い感度で高反射体を抽出可能であり、Xの値を大きくすれば、より高い特異度で高反射体を検出可能となる。
g=Hf+n
fsを算出する。
fs=Wg
W=FHT(HFHT+N)−1
F=E[ffT]
N=E[nnT]
0=E[fnT]
ただし、E[・]は期待値であり、fとnは無相関であるとする。
ズを有する高反射体の位置候補が抽出される。つまり、本実施例の超音波装置は、高反射体の位置をより精度良く推定するだけでなく、抽出された高反射体のサイズを推定することが可能である。このようにして推定された高反射体のサイズを画像上に候補位置とともに表示することで、より信頼性の高い超音波装置を提供することができる。
実施例6では、相関フィルタリング処理を行う領域を絞った超音波装置について説明する。
対しては相関フィルタリング処理を行うため、相関フィルタリング処理を行わない場合と比べてより精度の高い位置抽出が可能となる。
Claims (19)
- 被検体内部に弾性波のビームを走査して複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う信号処理装置であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関算出部と、
前記走査線上の複数の位置の中から、前記相関値が所定の値と異なる値となる位置を、特異領域が存在し得る位置として抽出する相関変化位置抽出部と、
を備えることを特徴とする信号処理装置。 - 前記相関変化位置抽出部は、前記特異領域が存在し得る位置として前記相関値が第1の値から第2の値に変化した位置を抽出することを特徴とする請求項1に記載の信号処理装置。
- 前記第1の走査線と前記第2の走査線との所定の相関は、該第1の走査線と該第2の走査線との相関値が0.5以上であることを特徴とする請求項1または2に記載の信号処理装置。
- 前記第1の走査線と前記第2の走査線とは隣接する走査線であることを特徴とする請求項1〜3のうちいずれか1項に記載の信号処理装置。
- 前記相関変化位置抽出部から出力された前記特異領域が存在し得る位置を前記被検体の断層像に重畳して表示する画像処理部をさらに備えることを特徴とする請求項1〜4のうちいずれか1項に記載の信号処理装置。
- 前記走査線間相関算出部は、
前記走査線上に注目位置を設定し、前記第1の走査線と前記第2の走査線それぞれの受信波形データから前記注目位置を基準とする所定幅の領域の波形データを抽出し、前記抽出した波形データ間の相関値を算出することにより、前記注目位置の相関値を得るものであり、
前記注目位置を移動させることによって、前記走査線上の複数の位置それぞれの相関値を算出するものであることを特徴とする請求項1〜5のうちいずれか1項に記載の信号処理装置。 - 前記相関変化位置抽出部は、相関値が所定の設定値よりも小さい位置を、相関値が前記所定の値と異なる値となる位置とみなして、前記特異領域が存在し得る位置として抽出することを特徴とする請求項1〜6のうちいずれか1項に記載の信号処理装置。
- 前記相関変化位置抽出部は、前記相関値に基づいて前記特異領域が存在し得る位置の第1の候補を抽出した後、前記第1の候補の周辺領域のエコー強度を取得し、前記周辺領域の中でエコー強度が所定の値よりも高くなる位置を、前記第1の候補の代わりに、前記特異領域が存在し得る位置として出力することを特徴とする請求項1〜7のうちいずれか1項に記載の信号処理装置。
- 前記第1の走査線上の第1の位置が前記特異領域が存在し得る位置として抽出された場合に、前記第1の位置よりも浅い部分における前記第1の走査線と前記第2の走査線とのエコー強度の比と、前記第1の位置よりも深い部分における前記第1の走査線と前記第2の走査線とのエコー強度の比と、を用いて、前記第1の位置における物性パラメータを算出する物性算出部をさらに備えることを特徴とする請求項1〜8のうちいずれか1項に記
載の信号処理装置。 - 前記特異領域が存在し得る位置および/または前記物性パラメータの値を前記断層像とともに表示し、
前記物性パラメータの値に応じて、前記特異領域が存在し得る位置および/または前記物性パラメータの値の表示形態を異ならせることを特徴とする請求項9に記載の信号処理装置。 - 前記相関変化位置抽出部から出力された特異領域が存在し得る位置に送信フォーカスが合うように送信ビームが形成され、該送信ビームに基づく受信波形データが前記走査線間相関算出部による相関値の算出に用いられることを特徴とする請求項1〜10のうちいずれか1項に記載の信号処理装置。
- 被検体内からの弾性波の反射信号を受信して得られた信号を画像を形成するために信号処理する信号処理装置であって、
前記反射信号の少なくとも2本の近接する走査線の受信波形データから該近接する走査線間の相関値を算出し、出力する走査線間相関算出部と、
前記相関値の変化から前記被検体内の深さ方向の位置情報を抽出するとともに、前記変化の後の相関値に基づいて前記被検体内の特異領域の種類を鑑別する鑑別部と、
を備えることを特徴とする信号処理装置。 - 被検体内部に弾性波である超音波のビームを走査して複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う超音波装置であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関算出部と、
前記走査線上の複数の位置の中から、前記相関値が所定の値と異なる値となる位置を、高反射体が存在し得る位置として抽出する相関変化位置抽出部と、
を備えることを特徴とする超音波装置。 - 被検体内部で反射される複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う信号処理装置の制御方法であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関算出工程と、
前記走査線上の複数の位置の中から、前記相関値が所定の値と異なる値となる位置を、特異領域が存在し得る位置として抽出する相関変化位置抽出工程と、
を含むことを特徴とする信号処理装置の制御方法。 - 被検体内部で反射される複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成する超音波装置の制御方法であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関算出工程と、
前記走査線上の複数の位置の中から、前記相関値が所定の値と異なる値となる位置を、高反射体の存在位置の候補として抽出する相関変化位置抽出工程と、
を含むことを特徴とする超音波装置の制御方法。 - 被検体内部に弾性波のビームを走査して複数の走査線の受信波形データを取得し、該複
数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う信号処理装置であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について算出する走査線間相関算出部と、
所定の深さについて算出された相互相関値の走査方向の分布に対して、所定サイズの特異領域の両端に落ち込みを持つ第1の分布形状を前記特異領域の中心位置に落ち込みを持つ第2の分布形状へと変換する変換処理を、適用し、その変換処理の結果を用いて特異領域が存在し得る位置を推定する処理部と、
を備えることを特徴とする信号処理装置。 - 前記処理部は、前記特異領域のサイズが異なる複数の変換処理を、前記相互相関値の走査方向の分布に対して適用し、各変換処理の結果を用いて特異領域が存在し得る位置を推定することを特徴とする請求項16に記載の信号処理装置。
- 被検体内部に弾性波のビームを走査して複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う信号処理装置であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について、算出する走査線間相関算出部と、
前記走査線上の複数の位置の中から、前記相関値が所定の値と異なる値となる位置を、特異領域が存在し得る位置候補として抽出する相関変化位置抽出部と、
前記位置候補を基準として設定される注目領域について算出された相互相関値の走査方向の分布に対して、所定サイズの特異領域の両端に落ち込みを持つ第1の分布形状を前記特異領域の中心位置に落ち込みを持つ第2の分布形状へと変換する変換処理を、適用し、その変換処理の結果を用いて特異領域が存在し得る位置を推定する処理部と、
を備えることを特徴とする信号処理装置。 - 被検体内部に弾性波のビームを走査して複数の走査線の受信波形データを取得し、該複数の走査線の受信波形データから前記被検体の断層像を形成するために信号処理を行う信号処理装置の制御方法であって、
第1の走査線と、該第1の走査線と所定の相関を有する第2の走査線との間の受信波形データの相関値を、該走査線上の複数の位置について算出する走査線間相関算出工程と、
所定の深さについて算出された相互相関値の走査方向の分布に対して、所定サイズの特異領域の両端に落ち込みを持つ第1の分布形状を前記特異領域の中心位置に落ち込みを持つ第2の分布形状へと変換する変換処理工程と、前記変換処理工程による処理の結果を用いて特異領域が存在し得る位置を推定する推定工程と、
を含むことを特徴とする信号処理装置の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009051886A JP5511201B2 (ja) | 2008-07-31 | 2009-03-05 | 信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 |
| CN200980129082.7A CN102105107B (zh) | 2008-07-31 | 2009-07-24 | 用于检测诸如高反射率的反射体的独特区域的信号处理装置 |
| PCT/JP2009/063623 WO2010013792A1 (en) | 2008-07-31 | 2009-07-24 | Signal processing apparatus, ultrasonic apparatus and method for detecting a unique region such as a reflector of high reflectivity |
| EP09788007A EP2306903B1 (en) | 2008-07-31 | 2009-07-24 | Signal processing apparatus, ultrasonic apparatus and method for detecting a unique region such as a reflector of high reflectivity |
| US12/995,536 US8784317B2 (en) | 2008-07-31 | 2009-07-24 | Signal processing apparatus, ultrasonic apparatus, control method for signal processing apparatus, and control method for ultrasonic apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198500 | 2008-07-31 | ||
| JP2008198500 | 2008-07-31 | ||
| JP2009051886A JP5511201B2 (ja) | 2008-07-31 | 2009-03-05 | 信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010051782A true JP2010051782A (ja) | 2010-03-11 |
| JP5511201B2 JP5511201B2 (ja) | 2014-06-04 |
Family
ID=41130589
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009051886A Active JP5511201B2 (ja) | 2008-07-31 | 2009-03-05 | 信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8784317B2 (ja) |
| EP (1) | EP2306903B1 (ja) |
| JP (1) | JP5511201B2 (ja) |
| CN (1) | CN102105107B (ja) |
| WO (1) | WO2010013792A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012105718A1 (en) | 2011-02-04 | 2012-08-09 | Canon Kabushiki Kaisha | Ultra sound imaging signal processing apparatus |
| JP2014213134A (ja) * | 2013-04-30 | 2014-11-17 | キヤノン株式会社 | 被検体情報取得装置、被検体情報取得装置の制御方法 |
| JP2016512779A (ja) * | 2013-03-20 | 2016-05-09 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波による微小石灰化の検出のためのビームフォーミング技術 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011500715A (ja) * | 2007-10-16 | 2011-01-06 | ザイモジェネティクス, インコーポレイテッド | 自己免疫疾患の治療のためのBLyS阻害剤および抗CD20剤の組合せ |
| JP5483905B2 (ja) | 2009-03-03 | 2014-05-07 | キヤノン株式会社 | 超音波装置 |
| JP5393256B2 (ja) | 2009-05-25 | 2014-01-22 | キヤノン株式会社 | 超音波装置 |
| JP5424933B2 (ja) * | 2010-02-23 | 2014-02-26 | キヤノン株式会社 | 生体情報処理装置 |
| JP5637725B2 (ja) | 2010-04-12 | 2014-12-10 | キヤノン株式会社 | 音響波イメージング装置 |
| JP5847490B2 (ja) | 2011-08-25 | 2016-01-20 | キヤノン株式会社 | 被検体情報取得装置 |
| JP5967901B2 (ja) | 2011-11-07 | 2016-08-10 | キヤノン株式会社 | 被検体情報取得装置 |
| US9792411B2 (en) * | 2013-03-14 | 2017-10-17 | The Trustees Of Dartmouth College | Poroelastic dynamic mechanical analyzer for determining mechanical properties of biological materials |
| JP6238556B2 (ja) | 2013-04-25 | 2017-11-29 | キヤノン株式会社 | 被検体情報取得装置およびその制御方法、ならびに探触子 |
| KR102376953B1 (ko) * | 2014-03-26 | 2022-03-21 | 삼성전자주식회사 | 초음파 영상을 위한 적응 복조 방법 및 장치 |
| EP3190975B1 (en) * | 2014-08-05 | 2021-01-06 | Habico, Inc. | Device, system, and method for hemispheric breast imaging |
| DE102014216015A1 (de) * | 2014-08-13 | 2016-02-18 | Robert Bosch Gmbh | Verfahren und Messvorrichtung zur Detektion mindestens eines Objektes anhand von an diesem reflektierten Ultraschallsignalen |
| KR102389866B1 (ko) * | 2014-12-30 | 2022-04-22 | 삼성전자주식회사 | 초음파 영상을 생성하는 방법 및 영상 처리 장치 |
| JP6589619B2 (ja) * | 2015-01-09 | 2019-10-16 | コニカミノルタ株式会社 | 超音波診断装置 |
| HU231249B1 (hu) * | 2015-06-26 | 2022-05-28 | Dermus Kft. | Eljárás ultrahangkép előállítására és számítógépes adathordozó |
| JP7195759B2 (ja) | 2018-04-20 | 2022-12-26 | キヤノン株式会社 | 光音響装置および被検体情報取得方法 |
| JP7347314B2 (ja) * | 2020-04-13 | 2023-09-20 | トヨタ自動車株式会社 | センサ及びセンサシステム |
| EP4006579A1 (en) * | 2020-11-25 | 2022-06-01 | Supersonic Imagine | Method and system for compensating depth-dependent attenuation in ultrasonic signal data |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004528921A (ja) * | 2001-05-22 | 2004-09-24 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ノイズの多い超音波データにおけるコヒーレント反射体の検出 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3109749B2 (ja) | 1991-04-17 | 2000-11-20 | 株式会社東芝 | 超音波映像化装置 |
| JPH08206117A (ja) * | 1994-05-27 | 1996-08-13 | Fujitsu Ltd | 超音波診断装置 |
| JP3696616B2 (ja) | 1994-05-27 | 2005-09-21 | フクダ電子株式会社 | 超音波診断装置 |
| JP2002360567A (ja) * | 2001-05-30 | 2002-12-17 | Ge Medical Systems Global Technology Co Llc | 超音波撮影方法および超音波撮影装置 |
| US20040034304A1 (en) * | 2001-12-21 | 2004-02-19 | Chikayoshi Sumi | Displacement measurement method and apparatus, strain measurement method and apparatus elasticity and visco-elasticity constants measurement apparatus, and the elasticity and visco-elasticity constants measurement apparatus-based treatment apparatus |
| JP4427228B2 (ja) | 2002-05-21 | 2010-03-03 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| US6824514B2 (en) * | 2002-10-11 | 2004-11-30 | Koninklijke Philips Electronics N.V. | System and method for visualizing scene shift in ultrasound scan sequence |
| US6585648B1 (en) * | 2002-11-15 | 2003-07-01 | Koninklijke Philips Electronics N.V. | System, method and machine readable program for performing ultrasonic fat beam transmission and multiline receive imaging |
| JP4575737B2 (ja) * | 2004-09-29 | 2010-11-04 | 富士フイルム株式会社 | 超音波撮像装置 |
| US20070167802A1 (en) * | 2005-12-05 | 2007-07-19 | General Electric Company | Accurate time delay estimation method and system for use in ultrasound imaging |
| EP2002784B1 (en) * | 2007-06-11 | 2018-07-11 | Canon Kabushiki Kaisha | Intravital-information imaging apparatus |
| JP5294687B2 (ja) * | 2008-05-02 | 2013-09-18 | キヤノン株式会社 | 超音波測定装置およびその制御方法 |
| JP5495607B2 (ja) * | 2008-05-27 | 2014-05-21 | キヤノン株式会社 | 超音波診断装置 |
-
2009
- 2009-03-05 JP JP2009051886A patent/JP5511201B2/ja active Active
- 2009-07-24 CN CN200980129082.7A patent/CN102105107B/zh active Active
- 2009-07-24 US US12/995,536 patent/US8784317B2/en active Active
- 2009-07-24 WO PCT/JP2009/063623 patent/WO2010013792A1/en active Application Filing
- 2009-07-24 EP EP09788007A patent/EP2306903B1/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004528921A (ja) * | 2001-05-22 | 2004-09-24 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ノイズの多い超音波データにおけるコヒーレント反射体の検出 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012105718A1 (en) | 2011-02-04 | 2012-08-09 | Canon Kabushiki Kaisha | Ultra sound imaging signal processing apparatus |
| JP2012161411A (ja) * | 2011-02-04 | 2012-08-30 | Canon Inc | 信号処理装置 |
| US9448100B2 (en) | 2011-02-04 | 2016-09-20 | Canon Kabushiki Kaisha | Signal processing apparatus |
| JP2016512779A (ja) * | 2013-03-20 | 2016-05-09 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波による微小石灰化の検出のためのビームフォーミング技術 |
| JP2014213134A (ja) * | 2013-04-30 | 2014-11-17 | キヤノン株式会社 | 被検体情報取得装置、被検体情報取得装置の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2306903A1 (en) | 2011-04-13 |
| EP2306903B1 (en) | 2013-03-20 |
| WO2010013792A1 (en) | 2010-02-04 |
| US20110083511A1 (en) | 2011-04-14 |
| CN102105107B (zh) | 2014-06-18 |
| CN102105107A (zh) | 2011-06-22 |
| US8784317B2 (en) | 2014-07-22 |
| JP5511201B2 (ja) | 2014-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5511201B2 (ja) | 信号処理装置、超音波装置、信号処理装置の制御方法及び超音波装置の制御方法 | |
| JP6162094B2 (ja) | 超音波高調波撮像のためのシステム | |
| JP6462340B2 (ja) | 超音波診断装置、画像処理装置及び画像処理方法 | |
| JP5619191B2 (ja) | 超音波診断装置,および方法 | |
| JP6063553B2 (ja) | 超音波イメージング方法及び超音波イメージング装置 | |
| JP5814556B2 (ja) | 信号処理装置 | |
| JP6288996B2 (ja) | 超音波診断装置及び超音波イメージングプログラム | |
| JP6601320B2 (ja) | 超音波診断装置、及び超音波診断装置の制御方法 | |
| KR102011545B1 (ko) | 초음파 진단 장치, 화상 처리 장치 및 화상 처리 방법 | |
| EP2302414A2 (en) | Ultrasound system and method of performing measurement on three-dimensional ultrasound image | |
| JP6063552B2 (ja) | 超音波イメージング方法及び超音波イメージング装置 | |
| EP3013243A1 (en) | Elastography measurement system and method | |
| JP6741012B2 (ja) | 超音波診断装置、及び超音波信号処理方法 | |
| US8328723B2 (en) | Ultrasound diagnosis apparatus | |
| JP2009090102A (ja) | 超音波診断方法及び装置 | |
| JP2010046484A (ja) | 弾性映像を形成する超音波システム及び弾性映像形成方法 | |
| US9107631B2 (en) | Ultrasonic imaging apparatus and a method for generating an ultrasonic image | |
| JP5950599B2 (ja) | 被検体情報取得装置、被検体情報取得方法及びプログラム | |
| JP5823184B2 (ja) | 超音波診断装置、医用画像処理装置および医用画像処理プログラム | |
| JP5348829B2 (ja) | 超音波診断装置、超音波画像表示方法及び超音波画像表示プログラム | |
| JP6705261B2 (ja) | 画像生成装置および画像生成方法 | |
| JPWO2017047328A1 (ja) | 超音波診断装置、及び超音波撮像方法 | |
| JP2005318921A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110506 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130917 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140325 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5511201 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |