JP2010047377A - 高所作業車の操作装置 - Google Patents
高所作業車の操作装置 Download PDFInfo
- Publication number
- JP2010047377A JP2010047377A JP2008213746A JP2008213746A JP2010047377A JP 2010047377 A JP2010047377 A JP 2010047377A JP 2008213746 A JP2008213746 A JP 2008213746A JP 2008213746 A JP2008213746 A JP 2008213746A JP 2010047377 A JP2010047377 A JP 2010047377A
- Authority
- JP
- Japan
- Prior art keywords
- bucket
- signal
- sensor
- expansion
- contraction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008602 contraction Effects 0.000 claims description 55
- 238000004364 calculation method Methods 0.000 claims description 43
- 238000001514 detection method Methods 0.000 abstract description 9
- 238000000034 method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F11/00—Lifting devices specially adapted for particular uses not otherwise provided for
- B66F11/04—Lifting devices specially adapted for particular uses not otherwise provided for for movable platforms or cabins, e.g. on vehicles, permitting workmen to place themselves in any desired position for carrying out required operations
- B66F11/044—Working platforms suspended from booms
- B66F11/046—Working platforms suspended from booms of the telescoping type
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
【解決手段】操作レバー7と、操作レバー7の傾動操作方向を検出する傾動操作センサと、伸縮操作方向を検出する伸縮操作センサと、回動操作方向を検出する回動操作センサと、伸縮操作センサと回動操作センサからの検出信号を受けて操作レバー7の回動方向と伸縮方向に応じてバケット4を水平移動させ、又は傾動操作センサからの検出信号を受けて操作レバー7の傾動方向に応じてバケット4を垂直移動させるように各駆動部に制御信号を出力する制御手段を備える。係る構成によれば、操作レバー7を操作することのみによって、バケット4を平面視における姿勢を維持したまま所要方向へ水平移動又は垂直移動させることができ、高所作業の的確性及び操作の簡便性が確保される。
【選択図】図1
Description
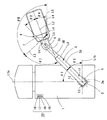
図1には、本願発明の実施形態に係る操作装置を備えた高所作業車Zの平面視を示しており、また図6には該高所作業車Zの側面視を示している。
B:高所作業車Zの動作形態
この実施形態における上記高所作業車Zでは、上記バケット4の移動形態として、上記車両側操作部20の操作に基づく第1の移動形態と、上記バケット側操作レバー7の操作に基づく第2の移動形態を、作業者が任意に選択できるようになっている。
C:作動制御の基本思想
ここで、上記バケット側操作レバー7の操作に基づく上記高所作業車Zの作動制御の基本思想を、図1、図3及び図6を参照して説明する。
D:制御系の構成
制御系は、図2に示すように、センサ群10とバケット側操作レバー7と車両側操作部20と制御手段25と駆動部群40及びアクセル55で構成される。
E:実際の作動制御の説明
ここで、上記制御系における水平移動又は垂直移動の実際の制御を、図7に示すフローチャートに基づいて説明する。
2 ・・旋回台
3 ・・伸縮ブーム
4 ・・バケット
5 ・・支点軸
6 ・・バケット支持軸
7 ・・吊ワイヤ
11 ・・伸縮量センサ
12 ・・起伏角センサ
13 ・・旋回角センサ
14 ・・首振り角センサ
15 ・・操作レバー方向センサ
16 ・・伸縮操作部
17 ・・起伏操作部
18 ・・旋回操作部
19 ・・バケット操作部
21 ・・現在位置算出手段
22 ・・目標位置算出手段
23 ・・移動量算出手段
24 ・・制御信号算出手段
25 ・・制御手段
41 ・・伸縮駆動部
42 ・・起伏駆動部
43 ・・旋回駆動部
44 ・・首振り駆動部
51 ・・傾動操作センサ
52 ・・伸縮操作センサ
53 ・・回動操作センサ
54 ・・捩り量センサ
55 ・・アクセル(移動速度指示手段)
71 ・・レバー本体
72 ・・握り部
73 ・・押しボタン
74 ・・基台
75 ・・支持ピン
Z ・・高所作業車
Claims (2)
- 車両(1)上に旋回可能に旋回台(2)を配置し該旋回台(2)を旋回駆動部(43)によって旋回駆動させるとともに、伸縮駆動部(41)によって伸縮駆動される伸縮ブーム(3)を上記旋回台(2)に起伏可能に配置し該伸縮ブーム(3)を起伏駆動部(42)によって起伏駆動させる一方、上記伸縮ブーム(3)の先端部には首振り可能にバケット(4)を配置し該バケット(4)を首振り駆動部(44)によって首振り駆動させるようにした高所作業車において、
上記伸縮ブーム(3)の伸縮量を検出する伸縮量センサ(11)と、
該伸縮ブーム(3)の起伏角を検出する起伏角センサ(12)と、
該伸縮ブーム(3)の旋回角を検出する旋回角センサ(13)と、
上記バケット(4)の首振り角を検出する首振り角センサ(14)と、
上記バケット(4)に配置された操作レバー(7)であって、上下方向に傾動可能で且つ軸方向に伸縮可能とされるとともに鉛直軸(Lc)回りに回動可能とされた操作レバー(7)と、
上記操作レバー(7)の傾動操作に伴う傾動操作方向を検出して傾動操作信号「Sf」を出力する傾動操作センサ(51)と、
上記操作レバー(7)の伸縮操作に伴う伸縮操作方向を検出して伸縮操作信号「Sg」を出力する伸縮操作センサ(52)と、
上記操作レバー(7)の回動操作に伴う回動操作方向を検出して回動操作信号「Sh」を出力する回動操作センサ(53)と、
上記伸縮量センサ(11)からの伸縮量信号「Sa」と上記起伏角センサ(12)からの起伏角信号「Sb」と上記旋回角センサ(13)からの旋回角信号「Sc」と上記首振り角センサ(14)からの首振り角信号「Sd」を受けて現在の上記バケット(4)の位置及び姿勢を現在位置「Ps」として算出する現在位置算出手段(21)と、
上記バケット(4)の移動速度を指示する速度指示手段(55)と、
上記速度指示手段(55)からの速度信号「Sv」と上記伸縮操作センサ(52)からの伸縮操作信号「Sg」と上記回動操作センサ(53)からの回動操作信号「Sh」を受けて上記バケット(4)を上記現在位置「Ps」から、上記速度信号「Sv」に対応した速度で且つ上記伸縮操作信号「Sg」と上記回動操作信号「Sh」に基づいて求められる水平方向における目標移動方向線(L3)上に仮想的に設定される目標位置「Pe」へ向けて水平移動させ、又は上記速度指示手段(55)からの速度信号「Sv」と上記傾動操作センサ(51)からの傾動操作信号「Sf」を受けて上記バケット(4)を上記現在位置「Ps」から、上記速度信号「Sv」に対応した速度で且つ上記傾動操作信号「Sf」に基づいて求められる垂直方向における目標移動方向線(Ld)上に仮想的に設定される目標位置「Pe」へ向けて垂直移動させるように、上記各駆動部(41),(42),(43),(44)に制御信号「Q1,Q2,Q3,Q4」を出力する制御手段(25)を備えたことを特徴とする高所作業車の操作装置。 - 請求項1において、
上記制御手段(25)は、上記現在位置「Ps」における上記操作レバー(7)の極座標上の点「Xs,Ys,Zs」と、仮想的に設定される上記目標位置「Pe」の極座標上の点「Xe,Ye,Ze」に基づいて上記各駆動部(41),(42),(43),(44)の各移動量「Xa1,Xa2,Xa3,Xa4」を算出し、さらに該各移動量「Xa1,Xa2,Xa3,Xa4」に対応する制御信号「Q1,Q2,Q3,Q4」を算出する構成であることを特徴とする高所作業車の操作装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008213746A JP5235115B2 (ja) | 2008-08-22 | 2008-08-22 | 高所作業車の操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008213746A JP5235115B2 (ja) | 2008-08-22 | 2008-08-22 | 高所作業車の操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010047377A true JP2010047377A (ja) | 2010-03-04 |
| JP5235115B2 JP5235115B2 (ja) | 2013-07-10 |
Family
ID=42064820
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008213746A Expired - Fee Related JP5235115B2 (ja) | 2008-08-22 | 2008-08-22 | 高所作業車の操作装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5235115B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012091227A1 (en) * | 2010-12-27 | 2012-07-05 | G.I.D. Co., Ltd. | Stand-alone platform combinable with a boom |
| JP2019527171A (ja) * | 2016-05-23 | 2019-09-26 | イヴェコ・マギルス・アー・ゲーIveco Magirus Ag | 空中装置のための制御レバーを備えた制御センター |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63140603U (ja) * | 1987-03-04 | 1988-09-16 | ||
| JPH08119597A (ja) * | 1994-10-26 | 1996-05-14 | Kyowa Exeo Corp | 高所作業装置の作業台操作装置 |
| JP2530255Y2 (ja) * | 1991-05-20 | 1997-03-26 | 株式会社アイチコーポレーション | 作業装置の操作装置 |
| JP2000344495A (ja) * | 1999-06-01 | 2000-12-12 | Tadano Ltd | 高所作業車の操作装置 |
| JP2001163598A (ja) * | 1999-12-13 | 2001-06-19 | Tadano Ltd | ブーム付き作業車の作動制御装置 |
| JP2003073094A (ja) * | 2001-09-05 | 2003-03-12 | Aichi Corp | 高所作業車 |
-
2008
- 2008-08-22 JP JP2008213746A patent/JP5235115B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63140603U (ja) * | 1987-03-04 | 1988-09-16 | ||
| JP2530255Y2 (ja) * | 1991-05-20 | 1997-03-26 | 株式会社アイチコーポレーション | 作業装置の操作装置 |
| JPH08119597A (ja) * | 1994-10-26 | 1996-05-14 | Kyowa Exeo Corp | 高所作業装置の作業台操作装置 |
| JP2000344495A (ja) * | 1999-06-01 | 2000-12-12 | Tadano Ltd | 高所作業車の操作装置 |
| JP2001163598A (ja) * | 1999-12-13 | 2001-06-19 | Tadano Ltd | ブーム付き作業車の作動制御装置 |
| JP2003073094A (ja) * | 2001-09-05 | 2003-03-12 | Aichi Corp | 高所作業車 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012091227A1 (en) * | 2010-12-27 | 2012-07-05 | G.I.D. Co., Ltd. | Stand-alone platform combinable with a boom |
| JP2019527171A (ja) * | 2016-05-23 | 2019-09-26 | イヴェコ・マギルス・アー・ゲーIveco Magirus Ag | 空中装置のための制御レバーを備えた制御センター |
| JP7012029B2 (ja) | 2016-05-23 | 2022-02-10 | イヴェコ・マギルス・アー・ゲー | 空中装置のための制御レバーを備えた制御センター |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5235115B2 (ja) | 2013-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2785273T3 (es) | Vehículo minero y método para mover el brazo | |
| JP4988625B2 (ja) | 移動ロボット及びその制御方法 | |
| WO2011003324A1 (zh) | 工程车辆臂架控制器、控制系统、工程车辆、及控制方法 | |
| CN105358469B (zh) | 一种带有伸缩节的起重机及其控制方法 | |
| CN111788143B (zh) | 远程操作终端及作业车辆 | |
| US20240026658A1 (en) | Target path changing system for attachment | |
| JP5235115B2 (ja) | 高所作業車の操作装置 | |
| JP6665554B2 (ja) | コンクリート吹付システム | |
| EP4015439A1 (en) | Systems and methods for use in coordinating boom motion of a construction machine | |
| JP2016079555A (ja) | 法面吹付装置及び法面吹付工法 | |
| JP4716765B2 (ja) | 遠隔操作装置 | |
| JP7413949B2 (ja) | アタッチメントの目標速度変更システム | |
| JP6772765B2 (ja) | 画像表示装置 | |
| JP7516976B2 (ja) | アタッチメントの目標軌跡変更システム | |
| JP2004231335A (ja) | 高所作業車のブーム作動制御装置 | |
| JP2007272837A (ja) | 作業機の操作レバー装置 | |
| JP4021529B2 (ja) | 作業機の制御装置 | |
| JP2001247300A (ja) | ブーム付き作業機の制御装置 | |
| JP2019108180A (ja) | 遠隔操作端末および遠隔操作端末を備える作業車両 | |
| JPH1053398A (ja) | 作業機のブーム制御装置 | |
| JP3919130B2 (ja) | 高所作業車の作動制御装置 | |
| JP7477034B1 (ja) | クレーンの制御システム、制御装置、及び制御方法 | |
| JP5543260B2 (ja) | 仮支持工法車 | |
| JP4602505B2 (ja) | 屈伸ブーム式作業車の作業姿勢移行装置 | |
| JP2001226081A (ja) | 屈伸ブーム式作業車のブーム作動速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110819 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20111219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130312 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130325 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5235115 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160405 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |