JP2010046485A - 歯科用放射線装置とその利用法 - Google Patents
歯科用放射線装置とその利用法 Download PDFInfo
- Publication number
- JP2010046485A JP2010046485A JP2009193274A JP2009193274A JP2010046485A JP 2010046485 A JP2010046485 A JP 2010046485A JP 2009193274 A JP2009193274 A JP 2009193274A JP 2009193274 A JP2009193274 A JP 2009193274A JP 2010046485 A JP2010046485 A JP 2010046485A
- Authority
- JP
- Japan
- Prior art keywords
- image acquisition
- slit
- collimation
- sensor
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 41
- 230000005855 radiation Effects 0.000 claims abstract description 41
- 239000011159 matrix material Substances 0.000 claims description 38
- 238000003325 tomography Methods 0.000 claims description 31
- 230000009471 action Effects 0.000 claims description 6
- 210000001847 jaw Anatomy 0.000 description 64
- 239000007787 solid Substances 0.000 description 33
- 210000002455 dental arch Anatomy 0.000 description 32
- 238000001514 detection method Methods 0.000 description 13
- 238000003384 imaging method Methods 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 4
- 210000004283 incisor Anatomy 0.000 description 4
- 230000002238 attenuated effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 230000001678 irradiating effect Effects 0.000 description 3
- 230000013011 mating Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 210000003625 skull Anatomy 0.000 description 3
- 210000000988 bone and bone Anatomy 0.000 description 2
- 238000013480 data collection Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- FSCYIRALRRUZFD-UHFFFAOYSA-N C=C(CC1)C1N Chemical compound C=C(CC1)C1N FSCYIRALRRUZFD-UHFFFAOYSA-N 0.000 description 1
- 0 CC(CC(F)(F)F)C(C1)C1C1*(C2)C2C1 Chemical compound CC(CC(F)(F)F)C(C1)C1C1*(C2)C2C1 0.000 description 1
- 241000219793 Trifolium Species 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/51—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for dentistry
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Dentistry (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
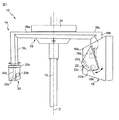
【解決手段】複数の形状のコリメーション用スリットにより適切にX線をコリメートするコリメーション装置を有するX線発生装置(18)と、画像取得用の第1の面、第2の面、第3の面を有する少なくとも1つのX線センサー(20a、20b)とを備える歯科用放射線装置において、各面が適切な形状のスリットと向かい合って配置され、パノラマ撮影モードと、コーン・ビーム断層撮影モードと、パノラマ撮影モードで利用される軌跡を決定するモードのそれぞれにおいて利用される。第3のモードでは、面Pに沿って延伸する1つの形状のスリットが、第2の面で面Pに垂直なZ軸に沿っている一部に対応する第3の面と向かい合うように配置され、X線発生装置とセンサーの組立体が、Z軸に平行な軸のまわりに回転駆動される。
【選択図】図1
Description
X線の出力ウインドウと、そのウインドウの前に位置していて、複数の形状のコリメーション用スリットを利用してX線を適切にコリメートするコリメーション装置とを有するX線発生装置と、
少なくとも1つのセンサーと、を具備し、
少なくとも1つのセンサーは画像取得用の第1の面と画像取得用の第2の面を備えていて、
画像取得用の第1の面は、面Pに垂直な軸Zに沿って延びていて歯科用放射線装置が第1の位置にあるときに利用され、X線発生装置とこの画像取得用の第1の面の間に位置する顎のパノラマ画像を生成させ、このパノラマ画像は、Z軸に沿って延伸する第1の形状のコリメーション用スリットによってコリメートされてセンサーの画像取得用の第1の面によって受光されるX線をもとにして、面P内の所定の軌跡に沿ったX線発生装置と第1の面の移動と、Z軸に平行な軸のまわりの回転とを組み合わせることによって生成され、
画像取得用の第2の面は、歯科用放射線装置が第2の位置にあるときにコーン・ビーム断層撮影モードで利用され、第2の形状のコリメーション用スリットによってコリメートされて画像取得用の第2の面によって受光されるX線をもとにして、顎の一部だけの立体表示を、X線発生装置と第2の面をZ軸に平行な軸のまわりに回転させることによって生成させ、第2の形状のコリメーション用スリットは、画像取得用の第2の面に合ったサイズを有する、
構成にされた歯科用放射線装置において、
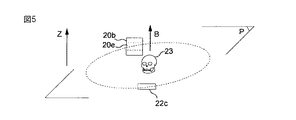
この歯科用放射線装置が、第3の利用位置を占めることができ、そうするためにX線出力ウインドウの前に、面Pに平行な方向に沿って延びていて、第2の面のZ軸に沿った一部に対応する画像取得用の第3の面と協働させるためその画像取得用の第3の面と向かい合って配置される第3の形状のコリメーション用スリットを位置決めする手段を備えていて、面Pに平行な方向に沿ったこのスリットの長手方向のサイズが、画像取得用の第2の面のこの同じ方向に沿ったサイズに適合している、
ことを特徴とする歯科用放射線装置を提案する。
画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を、面P内で、Z軸に平行な固定軸のまわりに位置決めする手段と、
第3の面−X線発生装置の組立体を固定軸のまわりに回転駆動する手段と、
回転運動の間に第3の面−X線発生装置の組立体が取る複数の位置について、面Pに平行な方向を向いた第3の形状のスリットによってコリメートされたX線を照射された顎の1つの部分に関する複数の画像信号を取得する手段と、
を備えている。
顎の異なる複数の部分の立体表示をもとにして顎の1つの立体表示を再構成する手段と、
このようにして再構成された立体表示をもとにして、顎のパノラマ画像をのちに生成させる際に画像取得用の第1の面−X線発生装置の組立体がたどるべき軌跡を特定する手段と、
を備えている。
歯科用放射線装置により患者の顎のパノラマ画像を生成させる方法であって、
歯科用放射線装置が、
X線の出力ウインドウと、そのウインドウの前に位置していて、複数の形状のコリメーション用スリットを利用してX線を適切にコリメートするコリメーション装置とを有するX線発生装置と、
少なくとも1つのセンサーと、を具備し、
その少なくとも1つのセンサーは画像取得用の第1の面と画像取得用の第2の面を備え、
画像取得用の第1の面が、面Pに垂直な軸Zに沿って延びていて歯科用放射線装置が第1の位置にあるときに利用され、X線発生装置とこの画像取得用の第1の面の間に位置する顎のパノラマ画像を生成させ、このパノラマ画像は、Z軸に沿って延伸する第1の形状のコリメーション用スリットによってコリメートされてセンサーの画像取得用の第1の面によって受光されるX線をもとにして、面P内の所定の軌跡に沿ったX線発生装置と第1の面の移動と、Z軸に平行な軸のまわりの回転とを組み合わせることによって生成され、
画像取得用の第2の面が、歯科用放射線装置が第2の位置にあるときにコーン・ビーム断層撮影モードで利用され、第2の形状のコリメーション用スリットによってコリメートされて画像取得用の第2の面によって受光されるX線をもとにして、顎の一部だけの立体表示を、X線発生装置と第2の面をZ軸に平行な軸のまわりに回転させることによって生成させ、第2の形状のコリメーション用スリットは、画像取得用の第2の面に合ったサイズを有する、
歯科用放射線装置であって、
この方法が、
コーン・ビーム断層撮影モードにおいてその歯科用放射線装置が第3の利用位置にあるとき、顎のパノラマ画像を生成させるためにその歯科用放射線装置の第1の利用位置においてX線発生装置−画像取得用の第1の面の組立体が面P内をたどることになる軌跡を得るため、
面Pに平行な方向に沿って延びていて、この方向に沿った長手方向のサイズが、画像取得用の第2の面のこの同じ方向に沿ったサイズに適合している第3の形状のコリメーション用スリットをX線出力ウインドウの前に位置決めするステップと、
このような方向を向いた第3の形状のコリメーション用スリットと向かい合うように、第2の面のZ軸に沿った一部に対応する画像取得用の第3の面を位置決めし、その第3の形状のスリットとその第3の面を協働させるステップと、
をあらかじめ含むことを特徴とする方法も目的としている。
a)画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を面P内でZ軸に平行な固定軸のまわりに位置決めするステップと;
b)画像取得用の第3の面−X線発生装置の組立体を固定回転軸のまわりに回転駆動するステップと;
c)回転運動の間に第3の面−X線発生装置の組立体が取る複数の位置について、面Pに平行な方向を向いた第3の形状のスリットによってコリメートされたX線を照射された顎の1つの部分に関する複数の画像信号を取得するステップと、
を含んでいる。
画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を、Z軸に平行な別の固定軸のまわりに位置決めするステップと、
ステップb)とステップc)を実施して顎の照射された別の部分に関する複数の画像信号を取得するステップと、
を含んでいる。
顎の異なる複数の部分の立体表示をもとにして顎の1つの立体表示を再構成するステップと、
このようにして再構成された立体表示をもとにして、顎のパノラマ画像をあとで生成させる際に画像取得用の第1の面−X線発生装置の組立体がたどるべき軌跡を特定するステップと、
を含んでいる。
X線出力ウインドウの前に、Z軸に沿って延伸する第1の形状のコリメーション用スリットを位置決めするステップと、
このような方向を向いた第1の形状のコリメーション用スリットと向かい合う位置に画像取得用の第1の面を位置決めするステップと、
第1の形状のコリメーション用スリットを有するX線発生装置と、軸Zに平行に配置された画像取得用の第1の面とで形成される組立体を得られた軌跡に沿って移動させることと、軸Zのまわりに回転運動させることを組み合わせる命令を出すステップと、
この移動命令の際に画像取得用の第1の面の画素をシフトさせる操作を組み合わせて顎のパノラマ画像を取得するステップとを、
を含んでいる。
1つの方向に沿って延びていて、軸回転によって図1のスリット22aの役割またはスリット22cの役割を果たす第1のスリットと、
図1のスリット22bと同様の第2のスリットである。
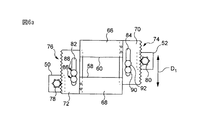
スリットの互いに垂直な方向に沿った長さを調節するため、可動性のある4つの辺によって区画されていて、各辺を互いに独立に移動させる調節手段を有する、幾何学的形状を変えることのできるスリットと、
図1のスリット22bと同様の第2のスリットである。
パノラマ撮影を行なう第1の動作モードにある(図2の第1のセンサー20aとスリット22a)か、
コーン・ビーム断層撮影を行なう第2の動作モード(図4の第2のセンサーとスリット22b)にある。このモードは、CBCT(コーン・ビーム断層撮影)とも呼ばれる。
再構成するすべての立体の画像信号の取得が順番になされる場合と、
撮影の間、固定システムが患者を動かなくする場合と、
である。
Claims (37)
- 歯科用放射線装置であって、
X線の出力ウインドウ(18b)と、そのウインドウの前に位置していて、複数の形状のコリメーション用スリットを利用してX線を適切にコリメートするコリメーション装置とを有するX線発生装置(18)と、
少なくとも1つのセンサー(20a、20b)と、を備えており、
少なくとも1つのセンサーは画像取得用の第1の面と画像取得用の第2の面を具備し、
画像取得用の第1の面は、面Pに垂直な軸Zに沿って延伸しており、歯科用放射線装置が第1の位置にあるときに、X線発生装置とこの画像取得用の第1の面の間に位置する顎のパノラマ画像を生成するために利用され、パノラマ画像は、Z軸に沿って延伸する第1の形状のコリメーション用スリット(22a)によってコリメートされたX線をセンサーの画像取得用の第1の面によって受光し、X線発生装置とセンサーの第1の面をZ軸に平行な軸のまわりの回転とを組み合わせられた面P内の所定の軌跡に沿って移動せしめることによって生成され、
画像取得用の第2の面は、歯科用放射線装置が第2の位置にあるときに、コーン・ビーム断層撮影モードで利用され、第2の形状のコリメーション用スリット(22b)によってコリメートされたX線を画像取得用の第2の面によって受光し、X線発生装置と第2の面をZ軸に平行な軸のまわりに回転させることによって、顎の一部だけの立体表示を生成され、第2の形状のコリメーション用スリットは、画像取得用の第2の面に合ったサイズを有する、
歯科用放射線装置において、
該歯科用放射線装置が、第3の位置を占めることができ、そうするためにX線出力ウインドウの前に、面Pに平行な方向に沿って延びていて、第2の面のZ軸に沿った一部に対応する画像取得用の第3の面と協働させるためその画像取得用の第3の面と向かい合って配置される第3の形状のコリメーション用スリット(22c)を位置決めする手段を備えていて、面Pに平行な方向に沿ったこのスリットの長手方向のサイズが、画像取得用の第2の面のこの同じ方向に沿ったサイズに適合している、
ことを特徴とする歯科用放射線装置。 - コーン・ビーム断層撮影モードにおいて、画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体をもとにして、それぞれが顎の異なる部分を表わす立体表示を所定の個数取得する手段を備える、ことを特徴とする請求項1に記載の歯科用放射線装置。
- 画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を、面P内で、Z軸に平行な固定軸のまわりに位置決めする手段と、
第3の面−X線発生装置の組立体を固定軸のまわりに回転駆動する手段と、
回転運動の間に第3の面−X線発生装置の組立体が取る複数の位置について、面Pに平行な方向を向いた第3の形状のスリットによってコリメートされたX線を照射された顎の1つの部分に関する複数の画像信号を取得する手段と、を備える、
ことを特徴とする請求項1または2に記載の歯科用放射線装置。 - 位置決め手段が、画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を、複数の別の固定回転軸のまわりに順番に位置決めできて、
その複数の別の固定回転軸のうちの1つの周囲に位置決めするごとに、駆動手段と取得手段が協働して、照射された顎の別の部分に関する画像信号を取得できる、
ことを特徴とする請求項3に記載の歯科用放射線装置。 - 取得した画像信号の集合をもとにして、照射された顎の各部分の立体表示を取得する手段を備える、ことを特徴とする請求項3または4に記載の歯科用放射線装置。
- 顎の異なる複数の部分の立体表示をもとにして顎の1つの立体表示を再構成する手段と、
このようにして再構成された立体表示をもとにして、顎のパノラマ画像をのちに生成させる際に画像取得用の第1の面−X線発生装置の組立体がたどるべき軌跡を特定する手段と、を備える、
ことを特徴とする請求項5に記載の歯科用放射線装置。 - 再構成された立体表示から軌跡を特定する手段が、その立体表示を構成するデータの閾値化手段またはセグメント化手段を備える、
ことを特徴とする請求項6に記載の歯科用放射線装置。 - コリメーション装置が、形状の異なる3つのコリメーション用スリットを備えていて、命令により、出力ウインドウの前に各スリットを位置させてX線を適切なやり方でコリメートすることができる、
ことを特徴とする請求項1から7のいずれか1項に記載の歯科用放射線装置。 - コリメーション装置が、コリメーション用スリットの可動支持体を備えていて、位置決め手段の作用により、1つの形態のコリメーション用スリットをX線出力ウインドウの前に位置させることができる、
ことを特徴とする請求項1から8のいずれか1項に記載の歯科用放射線装置。 - コリメーション用スリットの支持体が、位置決め手段の作用を受けて軸回転できる、ことを特徴とする請求項9に記載の歯科用放射線装置。
- コリメーション装置が、1つのコリメーション用スリットと、そのスリットのサイズを調節する手段を含んでいて、
そのスリットに、この歯科用放射線装置の3つの位置それぞれで利用されるコリメーション用スリットの3つの形状のうちの少なくともいくつかの形状が与えられる、
ことを特徴とする請求項1から7のいずれか1項に記載の歯科用放射線装置。 - 調節手段が、スリットの互いに垂直な方向に沿った長さを調節する手段である、ことを特徴とする請求項11に記載の歯科用放射線装置。
- 調節手段が方向ごとに独立である、ことを特徴とする請求項12に記載の歯科用放射線装置。
- コリメーション用スリットが4つの辺(58、60、62、64)によって区画されていて、調節手段が、その辺のそれぞれを互いに独立に移動させることができる、ことを特徴とする請求項11から13のいずれか1項に記載の歯科用放射線装置。
- 少なくとも1つのセンサーの画像取得用の第1の面、第2の面、第3の面のそれぞれが、1つの画素マトリックスまたは1つの画素サブマトリックスである、ことを特徴とする請求項1から14のいずれか1項に記載の歯科用放射線装置。
- 立体表示の所定の個数が、特に、画像取得用の第3の面の画素マトリックスまたは画素サブマトリックスのサイズに依存する、ことを特徴とする請求項2と15に記載の歯科用放射線装置。
- 複数の画像信号を取得する手段が、画素マトリックスまたは画素サブマトリックスによって捕集されたデータの読み取り手段を備えていて、その読み取り手段が、所定数の画素に従って画素をグループ化する手段を含んでいて、このようにしてグループ化された画素を読み取る、ことを特徴とする請求項3または4と請求項15に記載の歯科用放射線装置。
- 画像取得の第1の面と第2の面がそれぞれ第1のセンサーと第2のセンサーの一部をなす、ことを特徴とする請求項1から17のいずれか1項に記載の歯科用放射線装置。
- 適切な形状のコリメーション用スリットによってコリメートされたX線を受光するため、2つのセンサーを含んでいて、命令によってその2つのセンサーのそれぞれをX線発生装置と向かい合った位置に配置できる可動ユニット(20)を備えている、ことを特徴とする請求項18に記載の歯科用放射線装置。
- 画像取得の第1の面、第2の面、第3の面が同じセンサーの一部をなす、ことを特徴とする請求項1から17のいずれか1項に記載の歯科用放射線装置。
- 歯科用放射線装置により患者の顎のパノラマ画像を生成させる方法であって、
歯科用放射線装置が、
X線の出力ウインドウ(18b)と、そのウインドウの前に位置していて、複数の形状のコリメーション用スリットを利用してX線を適切にコリメートするコリメーション装置とを有するX線発生装置(18)と、
少なくとも1つのセンサー(20a、20b)とを備えており、
その少なくとも1つのセンサーは、面Pに垂直な軸Zに沿って延びていて歯科用放射線装置が第1の位置にあるときに利用される画像取得用の第1の面を備えていて、X線発生装置とこの画像取得用の第1の面の間に位置する顎のパノラマ画像を生成させ、 このパノラマ画像は、Z軸に沿って延伸する第1の形状のコリメーション用スリット(22a)によってコリメートされてセンサーの画像取得用の第1の面によって受光されるX線をもとにして、面P内の所定の軌跡に沿ったX線発生装置と第1の面の移動と、Z軸に平行な軸のまわりの回転とを組み合わせることによって生成され、
少なくとも1つのセンサーは、歯科用放射線装置が第2の位置にあるときにコーン・ビーム断層撮影モードで利用される画像取得用の第2の面を備えていて、
第2の形状のコリメーション用スリット(22b)によってコリメートされて画像取得用の第2の面によって受光されるX線をもとにして、
顎の一部だけの立体表示を、X線発生装置と第2の面をZ軸に平行な軸のまわりに回転させることによって生成させ、
第2の形状のコリメーション用スリットは、画像取得用の第2の面に合ったサイズを有する、
歯科用放射線装置であって、
この方法が、コーン・ビーム断層撮影モードにおいてその歯科用放射線装置が第3の利用位置にあるとき、顎のパノラマ画像を生成させるためにその歯科用放射線装置の第1の利用位置においてX線発生装置−画像取得用の第1の面の組立体が面P内をたどることになる軌跡を得るため、
面Pに平行な方向に沿って延びていて、この方向に沿った長手方向のサイズが、画像取得用の第2の面のこの同じ方向に沿ったサイズに適合している第3の形状のコリメーション用スリット(22c)をX線出力ウインドウの前に位置決めするステップ(S1)と、
このような方向を向いた第3の形状のコリメーション用スリットと向かい合うように、第2の面のZ軸に沿った一部に対応する画像取得用の第3の面を位置決めし、その第3の形状のスリットとその第3の面を協働させるステップ(S2)をあらかじめ含む、
ことを特徴とする方法。 - 2つの位置決めステップの後、コーン・ビーム断層撮影モードにおいて、画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体をもとにして、それぞれが顎の異なる部分を表わす立体表示を所定の個数取得するステップを含む、
ことを特徴とする請求項21に記載の方法。 - a)画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を面P内でZ軸に平行な固定軸のまわりに位置決めするステップ(S4)と;
b)画像取得用の第3の面−X線発生装置の組立体を固定回転軸のまわりに回転駆動するステップ(S5)と;
c)回転運動の間に第3の面−X線発生装置の組立体が取る複数の位置について、面Pに平行な方向を向いた第3の形状のスリットによってコリメートされたX線を照射された顎の1つの部分に関する複数の画像信号を取得するステップ(S6)と、を含む、
ことを特徴とする請求項21または22に記載の方法。 - 画像取得用の第3の面−面Pに平行に延伸する第3の形状のコリメーション用スリットを有するX線発生装置の組立体を、Z軸に平行な別の固定軸のまわりに位置決めするステップと、
前記ステップb)とステップc)を実施して照射された顎の別の部分に関する複数の画像信号を取得するステップと、を含む、
ことを特徴とする請求項23に記載の方法。 - 取得した画像信号の集合をもとにして、照射された顎の各部分の立体表示を取得するステップを含む、ことを特徴とする請求項23または24に記載の方法。
- 顎の異なる複数の部分の立体表示をもとにして顎の1つの立体表示を再構成するステップ(S12)と、
このようにして再構成された立体表示をもとにして、顎のパノラマ画像をのちに生成させる際に画像取得用の第1の面−X線発生装置の組立体がたどるべき軌跡を特定するステップ(S14)と、を含む、
ことを特徴とする請求項25に記載の方法。 - 再構成された立体表示から軌跡を特定するステップが、その立体表示を構成するデータを閾値化またはセグメント化するステップ(S13)を含む、ことを特徴とする請求項26に記載の方法。
- X線出力ウインドウの前に、Z軸に沿って延伸する第1の形状のコリメーション用スリットを位置決めするステップ(S16)と、
このような方向を向いた第1の形状のコリメーション用スリットと向かい合う位置に画像取得用の第1の面を位置決めするステップ(S17)と、
第1の形状のコリメーション用スリットを有するX線発生装置と、軸(Z)に平行に配置された画像取得用の第1の面とで形成される組立体を得られた軌跡に沿って移動させることと、軸(Z)のまわりに回転運動させることを組み合わせる命令を出すステップと、
この移動命令の際に画像取得用の第1の面の画素をシフトさせる操作を組み合わせて顎のパノラマ画像を取得するステップと、
を含む、
ことを特徴とする請求項21から27のいずれか1項に記載の方法。 - コリメーション装置が、形状の異なる3つのコリメーション用スリットを備えていて、命令によりそのそれぞれを出力ウインドウの前に位置させる操作を、X線発生装置から出るX線の外に位置する静止位置からの移動によって行なう、ことを特徴とする請求項21から28のいずれか1項に記載の方法。
- コリメーション装置が1つのコリメーション用スリットを備えていて、出力ウインドウの前に1つの形状のコリメーション用スリットを配置する操作を、そのスリットのサイズの調節によって行なう、ことを特徴とする請求項21から28のいずれか1項に記載の方法。
- 調節操作が、特に、スリットの互いに垂直な方向に沿った長さを調節する操作を含む、ことを特徴とする請求項30に記載の方法。
- 少なくとも1つのセンサーの画像取得用の第1の面、第2の面、第3の面のそれぞれが、1つの画素マトリックスまたは1つの画素サブマトリックスである、ことを特徴とする請求項21から31のいずれか1項に記載の方法。
- 立体表示の所定の個数が、特に、画像取得用の第3の面の画素マトリックスまたは画素サブマトリックスのサイズに依存する、ことを特徴とする請求項22と32に記載の方法。
- 複数の画像信号を取得するステップが、画素マトリックスまたは画素サブマトリックスによって捕集されたデータを読み取るステップを備えていて、その読み取りステップが、所定数の画素に従って画素をグループ化し、このようにしてグループ化された画素を読み取る操作を含んでいる、ことを特徴とする請求項23または24と請求項32に記載の方法。
- 画像取得の第1の面と第2の面がそれぞれ第1のセンサーと第2のセンサーの一部をなす、ことを特徴とする請求項21から34のいずれか1項に記載の方法。
- センサーをX線発生装置と向かい合うように配置する操作を、そのセンサーを移動させることによって行なう、ことを特徴とする請求項35に記載の方法。
- 画像取得の第1の面、第2の面、第3の面が同じセンサーの一部をなす、ことを特徴とする請求項21から34のいずれか1項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0855681A FR2938182B1 (fr) | 2008-08-22 | 2008-08-22 | Appareil de radiologie dentaire et procede d'utilisation associe |
| FR0855681 | 2008-08-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010046485A true JP2010046485A (ja) | 2010-03-04 |
| JP5519974B2 JP5519974B2 (ja) | 2014-06-11 |
Family
ID=40418461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009193274A Expired - Fee Related JP5519974B2 (ja) | 2008-08-22 | 2009-08-24 | 歯科用放射線装置とその利用法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7945016B2 (ja) |
| EP (1) | EP2156791B1 (ja) |
| JP (1) | JP5519974B2 (ja) |
| KR (1) | KR101598630B1 (ja) |
| FR (1) | FR2938182B1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013135765A (ja) * | 2011-12-28 | 2013-07-11 | Nihon Univ | X線ct撮影装置、及びx線ct撮影方法 |
| JP2014161510A (ja) * | 2013-02-25 | 2014-09-08 | Tele Systems:Kk | パノラマ撮像装置及びパノラマ画像の再構成方法 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI123978B (fi) * | 2008-06-27 | 2014-01-15 | Planmeca Oy | Hammashoitolaitteisto |
| FR2938183B1 (fr) * | 2008-08-22 | 2011-12-09 | Trophy | Appareil de radiologie dentaire panoramique et procede d'utilisation associe |
| DE102009038588A1 (de) * | 2009-08-26 | 2011-03-24 | Degudent Gmbh | Verfahren zur Ermittlung eines Gesamtdatensatzes eines zu messenden Objektes |
| US9004757B2 (en) * | 2010-03-24 | 2015-04-14 | PaloDEx Grou Oy | Systems, assemblies, computer readable media and methods for medical imaging |
| CN103458793B (zh) * | 2010-12-22 | 2018-08-03 | 特罗菲公司 | 数字检测器 |
| US9161727B2 (en) | 2011-09-01 | 2015-10-20 | Hologic Inc | Independently rotatable detector plate for medical imaging device |
| ITBO20110566A1 (it) * | 2011-10-05 | 2013-04-06 | Cefla Coop | Dispositivo per l'acquisizione di radiografie panoramiche e radiografie volumetriche cbct |
| FR2982759B1 (fr) * | 2011-11-17 | 2013-11-29 | Trophy | Appareil de radiologie dentaire panoramique |
| KR101362723B1 (ko) * | 2012-05-15 | 2014-02-13 | (주)포인트닉스 | 듀얼 씨티 촬영 모드를 가진 치과용 엑스선 촬영 장치 |
| WO2014037770A1 (en) * | 2012-09-07 | 2014-03-13 | Trophy | Apparatus for partial ct imaging |
| USD698022S1 (en) | 2013-05-30 | 2014-01-21 | Dentsply International Inc. | Holder for a digital dental x-ray sensor |
| KR20160060638A (ko) * | 2013-08-20 | 2016-05-30 | 주식회사바텍 | 엑스선 영상촬영장치 및 엑스선 영상촬영방법 |
| KR20150088679A (ko) * | 2014-01-24 | 2015-08-03 | 주식회사바텍 | Ct 촬영 장치 |
| US9408581B2 (en) | 2014-03-07 | 2016-08-09 | Elwha Llc | Systems, devices, and methods for lowering dental x-ray dosage including feedback sensors |
| US9888891B2 (en) | 2014-06-26 | 2018-02-13 | Palodex Group Oy | X-ray imaging unit for medical imaging |
| CN105741239B (zh) * | 2014-12-11 | 2018-11-30 | 合肥美亚光电技术股份有限公司 | 牙齿全景图像的生成方法、装置及用于拍摄牙齿的全景机 |
| ITUA20162102A1 (it) * | 2016-03-30 | 2017-09-30 | Cefla S C | Dispositivo di limitazione del fascio per apparecchiature radiografiche |
| JP6878583B2 (ja) * | 2017-06-20 | 2021-05-26 | シャープ株式会社 | 調湿装置および調湿方法 |
| KR101941019B1 (ko) * | 2018-11-26 | 2019-01-22 | 오스템임플란트 주식회사 | 엑스선 촬영 장치 및 방법 |
| US11862357B2 (en) * | 2020-10-21 | 2024-01-02 | Illinois Tool Works Inc. | Adjustable collimators and x-ray imaging systems including adjustable collimators |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10225455A (ja) * | 1996-12-10 | 1998-08-25 | Morita Mfg Co Ltd | X線撮影装置 |
| WO2006109802A1 (ja) * | 2005-04-11 | 2006-10-19 | J. Morita Manufacturing Corporation | X線ct撮影用ユニットおよびx線撮影装置 |
| JP2007029166A (ja) * | 2005-07-22 | 2007-02-08 | Morita Mfg Co Ltd | 画像処理装置 |
| WO2007046372A1 (ja) * | 2005-10-17 | 2007-04-26 | J. Morita Manufacturing Corporation | 医療用デジタルx線撮影装置及び医療用デジタルx線センサ |
| JP2007159913A (ja) * | 2005-12-15 | 2007-06-28 | Toshiba Corp | X線診断装置及びその作動方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3319905B2 (ja) * | 1995-03-24 | 2002-09-03 | 株式会社モリタ製作所 | デジタルx線撮影装置 |
| JP3919048B2 (ja) * | 1998-09-02 | 2007-05-23 | 株式会社モリタ製作所 | 局所照射x線ct撮影装置 |
| WO2000057789A1 (fr) * | 1999-03-25 | 2000-10-05 | Nihon University | Appareil et procede d'imagerie obtenue par tomographie informatisee (ct) aux rayons x, par rayonnement local |
| JP4149189B2 (ja) * | 2002-04-04 | 2008-09-10 | 株式会社日立メディコ | X線ct装置 |
| DE10313110A1 (de) * | 2003-03-24 | 2004-10-21 | Sirona Dental Systems Gmbh | Röntgeneinrichtung und röntgenstrahlenempfindliche Kamera |
| DE10313109A1 (de) * | 2003-03-24 | 2004-10-21 | Sirona Dental Systems Gmbh | Röntgenstrahlenempfindliche Kamera und Röntgeneinrichtung |
| FI118413B (fi) * | 2005-04-11 | 2007-11-15 | Planmeca Oy | Tietokonetomografialaitteisto |
| US7711085B2 (en) * | 2005-04-11 | 2010-05-04 | J. Morita Manufacturing Corporation | Radiography apparatus with scout view function |
| JP4307406B2 (ja) * | 2005-04-22 | 2009-08-05 | 株式会社モリタ製作所 | 医療用x線撮影装置及びこれに用いるx線検出器 |
| JP4632891B2 (ja) * | 2005-07-22 | 2011-02-16 | 株式会社モリタ製作所 | X線ct撮影装置およびx線ct撮影方法 |
| US7486759B2 (en) * | 2006-10-12 | 2009-02-03 | J. Morita Manufacturing Corporation | X-ray computer tomography apparatus |
| WO2008092009A2 (en) * | 2007-01-24 | 2008-07-31 | Imaging Sciences International Llc | Adjustable scanner |
| US7787586B2 (en) * | 2007-02-22 | 2010-08-31 | J. Morita Manufacturing Corporation | Display method of X-ray CT image of maxillofacial area, X-ray CT apparatus and X-ray image display apparatus |
-
2008
- 2008-08-22 FR FR0855681A patent/FR2938182B1/fr not_active Expired - Fee Related
-
2009
- 2009-08-21 EP EP09168418.3A patent/EP2156791B1/en not_active Not-in-force
- 2009-08-21 KR KR1020090077830A patent/KR101598630B1/ko not_active Expired - Fee Related
- 2009-08-24 US US12/546,201 patent/US7945016B2/en not_active Expired - Fee Related
- 2009-08-24 JP JP2009193274A patent/JP5519974B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10225455A (ja) * | 1996-12-10 | 1998-08-25 | Morita Mfg Co Ltd | X線撮影装置 |
| WO2006109802A1 (ja) * | 2005-04-11 | 2006-10-19 | J. Morita Manufacturing Corporation | X線ct撮影用ユニットおよびx線撮影装置 |
| JP2007029166A (ja) * | 2005-07-22 | 2007-02-08 | Morita Mfg Co Ltd | 画像処理装置 |
| WO2007046372A1 (ja) * | 2005-10-17 | 2007-04-26 | J. Morita Manufacturing Corporation | 医療用デジタルx線撮影装置及び医療用デジタルx線センサ |
| JP2007159913A (ja) * | 2005-12-15 | 2007-06-28 | Toshiba Corp | X線診断装置及びその作動方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013135765A (ja) * | 2011-12-28 | 2013-07-11 | Nihon Univ | X線ct撮影装置、及びx線ct撮影方法 |
| JP2014161510A (ja) * | 2013-02-25 | 2014-09-08 | Tele Systems:Kk | パノラマ撮像装置及びパノラマ画像の再構成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100074402A1 (en) | 2010-03-25 |
| EP2156791B1 (en) | 2013-05-15 |
| EP2156791A1 (en) | 2010-02-24 |
| FR2938182B1 (fr) | 2010-11-19 |
| KR20100023782A (ko) | 2010-03-04 |
| KR101598630B1 (ko) | 2016-02-29 |
| JP5519974B2 (ja) | 2014-06-11 |
| US7945016B2 (en) | 2011-05-17 |
| FR2938182A1 (fr) | 2010-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5519974B2 (ja) | 歯科用放射線装置とその利用法 | |
| JP5547443B2 (ja) | 歯科用放射線装置とその利用法 | |
| CN108463170B (zh) | X光图像显示设备和x光图像显示方法 | |
| JP5805688B2 (ja) | 医療用x線撮影装置 | |
| JP6546173B2 (ja) | X線画像撮影装置及びx線画像撮影方法 | |
| US10687768B2 (en) | X-ray image forming device | |
| JPH10243944A (ja) | 人間の身体部分のx線撮影セットアップ装置 | |
| JP2013085667A (ja) | 歯科用x線撮影装置 | |
| US9066687B2 (en) | Panoramic dental x-ray unit | |
| JP2019536605A (ja) | 複数のx線画像から2d画像を再構築する方法 | |
| KR100280198B1 (ko) | Ct촬영이가능한x선촬영장치및방법 | |
| JP4653303B2 (ja) | コンピュータ断層撮影装置 | |
| KR101941019B1 (ko) | 엑스선 촬영 장치 및 방법 | |
| JP5217179B2 (ja) | X線断層撮影装置 | |
| KR102203630B1 (ko) | 엑스선 영상 생성 방법, 엑스선 영상 생성 장치 및 컴퓨터 판독 가능한 기록 매체 | |
| KR102203644B1 (ko) | 엑스선 영상 생성 방법, 엑스선 영상 생성 장치 및 컴퓨터 판독 가능한 기록 매체 | |
| JP2007151849A (ja) | X線ct撮影方法およびx線ct装置 | |
| CN120713549A (zh) | 用于采集双能量cbct容积射线照相术的设备和方法 | |
| KR20180096410A (ko) | 엑스선 촬영 장치 및 방법 | |
| KR20200037998A (ko) | 파노라마 영상 생성 방법, 파노라마 영상 생성 장치 및 컴퓨터 판독 가능한 기록 매체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110907 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20130307 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20130307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130703 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130925 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140404 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5519974 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |