JP2010044055A - 誘導性マルチターン式エンコーダ - Google Patents
誘導性マルチターン式エンコーダ Download PDFInfo
- Publication number
- JP2010044055A JP2010044055A JP2009159575A JP2009159575A JP2010044055A JP 2010044055 A JP2010044055 A JP 2010044055A JP 2009159575 A JP2009159575 A JP 2009159575A JP 2009159575 A JP2009159575 A JP 2009159575A JP 2010044055 A JP2010044055 A JP 2010044055A
- Authority
- JP
- Japan
- Prior art keywords
- rotating shaft
- encoder module
- inductive
- geared
- base plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2073—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils
- G01D5/208—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils using polyphase currents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/02—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using mechanical means
- G01D5/04—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using mechanical means using levers; using cams; using gearing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/20—Detecting rotary movement
- G01D2205/26—Details of encoders or position sensors specially adapted to detect rotation beyond a full turn of 360°, e.g. multi-rotation
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
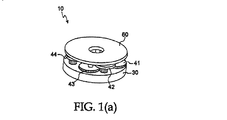
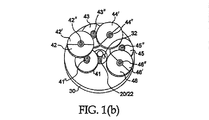
【解決手段】誘導性手段を用いてモジュールに動作的に接続された回転シャフト20が回転した回転数を決定する。誘導性コイルは、エミッタ・コイルと受信コイルとを備えている。これらのコイルは、対応するギア付の円形ディスクに対して動作するように関連付けられ、かつこれらのディスクに対向して配置されている。これらのギア付の円形ディスクは、所定のギア減速比を実行するように配列されている。
【選択図】図1b
Description
Claims (28)
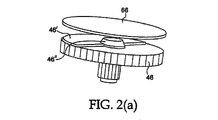
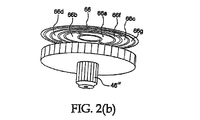
- 周囲にギアが配置された回転シャフトと、
貫通して配置された開口を有するベースプレートであって、該ベースプレートが、そのベースプレートの中に前記回転シャフトの少なくとも一部を受け入れるように構成され、前記ベースプレートが、そのベースプレートの中又は上に取付けられた複数のギア付の円形ディスクを備え、前記ギア付の円形ディスクの少なくともいくつかが、その円形ディスクの中又は上に導電性部分を有する、ベースプレートと、
上側に複数の誘導性コイルが配置された基板であって、前記複数の誘電性コイルのそれぞれが、少なくとも1つの対応する反対側のギア付の円形ディスク及び前記導電性部分に対して動作可能に整列されている、基板と、
前記ギア付の円形ディスクの互いに対する相対位置に基づいて、前記円形ディスクが前記誘導性コイルによって感知されたときに、前記回転シャフトの回転パラメータを決定するように構成されたポジション・ロジック装置と
を備え、
前記基板が、前記ベースプレートに対向するように配置され、前記回転シャフトが、シャフト・ギアによって前記ギア付の円形ディスクの少なくとも1つに機械的かつ動作可能に接続されており、前記少なくとも1つギア付の円形ディスクが、前記回転シャフトの回転により回転し、これにより、残りの前記ギア付の円形ディスクが、所定のギア減速比に基づいて回転するようになっており、前記誘導性コイルのそれぞれが、前記誘導性コイルに対して動作するように整列されかつ対向するように配置された前記ギア付の円形ディスクの回転数を表す出力信号を生成するように構成され、これにより、前記回転シャフトが回転した回転数が、前記ポジション・ロジック装置によって決定されるようになっていることを特徴とするマルチターン式エンコーダ・モジュール。 - 前記回転シャフトの回転と前記回転シャフトの回転によって回転させられた最後のギア付の円形ディスクの回転とに関する前記ギア減速比が、4,096、2,048、1,024、512のうちのいずれかであることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記モジュールが、3つのギア付の円形ディスクを備えており、前記円形ディスクのそれぞれが、4ビットの分解能を前記エンコーダ・モジュールに提供するようになっていることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記ギア付の円形ディスクの前記導電性部分が、金属、金属箔、導電性ポリマー、導電性プラスチック、合金、及び金属の組合せの少なくとも1つを含むものであることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記複数の誘導性コイルのそれぞれが、前記基板内に組み込まれていることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記複数の誘導性コイルのそれぞれが、前記基板に装着される別個の構成部品を形成していることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
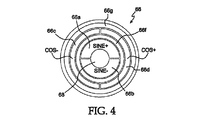
- 前記複数の誘導性コイルのそれぞれが、少なくとも1つのエミッタ・コイルと、少なくとも1つの受信コイルとを備えていることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記少なくとも1つの受信コイルが、少なくとも一対の受信コイルを含むものであることを特徴とする請求項7に記載のマルチターン式エンコーダ・モジュール。
- 前記受信コイルが、互いに90度位相がずれて配列されていることを特徴とする請求項8に記載のマルチターン式エンコーダ・モジュール。
- 前記出力信号を受信及び増幅するように構成された可変利得前置増幅器を更に備えていることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- 前記出力信号の搬送周波数を取り除くように構成されたディジタル・フィルタリング回路を更に備えていることを特徴とする請求項10に記載のマルチターン式エンコーダ・モジュール。
- アナログ形式の出力信号をディジタル表現に変換するように構成されたアナログ−ディジタル変換器を更に備えていることを特徴とする請求項10に記載のマルチターン式エンコーダ・モジュール。
- 回転シャフトの位置を表すディジタル出力信号を提供するように構成されたディジタル信号プロセッサを更に備えていることを特徴とする請求項10に記載のマルチターン式エンコーダ・モジュール。
- 前記回転シャフトが回転した回転数を表すディジタル出力信号を提供するように構成されたディジタル信号プロセッサを更に備えていることを特徴とする請求項10に記載のマルチターン式エンコーダ・モジュール。
- 前記エンコーダ・モジュールが、フレキシブル回路、プリント回路基板、セラミック基板のうちの1つに装着されているか又は取り付けられていることを特徴とする請求項1に記載のマルチターン式エンコーダ・モジュール。
- マルチターン式エンコーダの中の回転シャフトが回転した回転数を決定する方法であって、
周囲にギアが配置された回転シャフトを設けるステップと、
貫通して配置された開口を有するベースプレートを設けるステップであって、前記ベースプレートが、該ベースプレートの中に前記回転シャフトの少なくとも一部を受け入れるように構成され、前記ベースプレートが、前記ベースプレートの中又は上に取付けられた複数のギア付の円形ディスクを備え、前記ギア付の円形ディスクの少なくともいくつかが、その円形ディスクの中又は上に形成された導電性部分を有し、前記回転シャフトが、前記ギアによって前記ギア付の円形ディスクの少なくとも1つに機械的かつ動作可能に接続されている、ステップと、
上側に複数の誘導性コイルが配置された基板を設けるステップであって、前記複数の誘電性コイルのそれぞれが、少なくとも1つの対応する反対側のギア付の円形ディスク及び前記導電性部分に対して動作可能に整列され、前記基板が、前記ベースプレートに対向するように配置されている、ステップと、
前記ギア付の円形ディスクの互いに対する相対位置に基づいて、前記円形ディスクが前記誘導性コイルによって感知されたときに、前記回転シャフトの回転パラメータを決定するように構成されたポジション・ロジック装置を設けるステップと、
前記回転シャフトを回転させて、これにより前記ギア付の円形ディスクを所定のギア減速比に基づいて回転させるステップと、
前記誘導性コイルに対応して、前記誘導性コイルに対して動作するように整列されかつ前記誘導性コイルに対向するように配置された前記ギア付の円形ディスクの回転数を表す出力信号を、前記誘導性コイルのそれぞれについて生成するステップであって、前記出力信号の生成により、前記回転シャフトが回転した回転数が前記ポジション・ロジック装置によって決定される、ステップと
を含む方法。 - 前記回転シャフトの回転と前記回転シャフトの回転によって回転させられた最後のギア付の円形ディスクの回転とに関する前記ギア減速比が、4,096、2,048、1,024、512のうちのいずれかであることを特徴とする請求項16に記載の方法。
- 前記ギア付の円形ディスクの前記導電性部分が、金属、金属箔、導電性ポリマー、導電性プラスチック、合金、及び金属の組合せの少なくとも1つを含むものであることを特徴とする請求項16に記載の方法。
- 前記複数の誘導性コイルのそれぞれを前記基板内に組み込むステップを更に含むことを特徴とする請求項16に記載の方法。
- 前記複数の誘導性コイルのそれぞれに関して別個の構成部品で形成するステップと
前記構成部品を前記基板に装着するステップとを
更に含むことを特徴とする請求項16に記載の方法。 - 少なくとも1つのエミッタ・コイル及び少なくとも1つの受信コイルとして前記複数の誘導性コイルのそれぞれを設けるステップを更に含むことを特徴とする請求項16に記載の方法。
- 前記少なくとも1つの受信コイルが、少なくとも一対の受信コイルを含むものであることを特徴とする請求項21に記載の方法。
- 前記受信コイルが、互いに90度位相がずれて配列されていることを特徴とする請求項22に記載の方法。
- 前記出力信号を受信及び増幅するように構成された可変利得前置増幅器を設けるステップを更に含むことを特徴とする請求項16に記載の方法。
- 前記出力信号の搬送周波数を取り除くように構成されたディジタル・フィルタリング回路を設けるステップを更に含むことを特徴とする請求項16に記載の方法。
- アナログ形式の出力信号をディジタル表現に変換するように構成されたアナログ−ディジタル変換器を設けるステップを更に含むことを特徴とする請求項16に記載の方法。
- 回転シャフトの位置を表すディジタル出力信号を提供するように構成されたディジタル信号プロセッサを設けるステップを更に含むことを特徴とする請求項16に記載の方法。
- 前記回転シャフトが回転した回転数を表すディジタル出力信号を提供するように構成されたディジタル信号プロセッサを更に含むことを特徴とする請求項16に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/168,151 US7579829B1 (en) | 2008-07-06 | 2008-07-06 | Inductive multi-turn encoder |
| US12/168,151 | 2008-07-06 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010044055A true JP2010044055A (ja) | 2010-02-25 |
| JP4865014B2 JP4865014B2 (ja) | 2012-02-01 |
Family
ID=40973408
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009159575A Expired - Fee Related JP4865014B2 (ja) | 2008-07-06 | 2009-07-06 | 誘導性マルチターン式エンコーダ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7579829B1 (ja) |
| JP (1) | JP4865014B2 (ja) |
| DE (1) | DE102009031012A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012093716A1 (ja) | 2011-01-07 | 2012-07-12 | オリエンタルモーター株式会社 | 多回転アブソリュート回転角を検出する装置及びその回転角を検出する方法 |
| JP2016151576A (ja) * | 2015-02-16 | 2016-08-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 車両における回転モジュールの回転角度を検出するためのセンサ装置 |
| JP2016220426A (ja) * | 2015-05-21 | 2016-12-22 | オークマ株式会社 | 多回転検出器 |
| US9528855B2 (en) | 2011-11-14 | 2016-12-27 | Oriental Motor Co., Ltd. | Multi-turn absolute rotation angle detection device and method of detecting absolute rotation angle |
| DE102017205423A1 (de) | 2016-04-01 | 2017-10-05 | Fanuc Corporation | Encoder; der infiltration von flüssigkeit mittels licht erfasst |
| US9841947B2 (en) | 2011-07-12 | 2017-12-12 | Oriental Motor Co., Ltd. | Device and method for calculating absolute amount of displacement, and method for same |
| WO2021079898A1 (ja) * | 2019-10-24 | 2021-04-29 | 日本精機株式会社 | 位置検出装置及び液面検出装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110207578A1 (en) * | 2010-02-23 | 2011-08-25 | Avago Technologies Ecbu (Singapore) Pte, Ltd. | Harmonic Gear Multi-Turn Encoder |
| FR2999701B1 (fr) * | 2012-12-19 | 2015-01-09 | Sagem Defense Securite | Dispositif de detection d'un deplacement angulaire d'un organe de commande d'un vehicule |
| US9350216B2 (en) | 2012-12-28 | 2016-05-24 | Quicksilver Controls, Inc. | Integrated multi-turn absolute position sensor for high pole count motors |
| EP3686562B1 (en) * | 2019-01-25 | 2022-03-23 | Ratier-Figeac SAS | Inductive optical rotary sensor |
| US11169000B2 (en) * | 2019-09-06 | 2021-11-09 | Measurement Specialties, Inc. | Multi-turn measurement system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6247501A (ja) * | 1985-08-27 | 1987-03-02 | S G:Kk | アブソリユ−ト回転位置検出装置 |
| JP2004333478A (ja) * | 2003-05-09 | 2004-11-25 | Dr Johannes Heidenhain Gmbh | 電磁誘導式回転センサ及びこの電磁誘導式回転センサを備えたシャフトエンコーダ |
| JP2007155698A (ja) * | 2005-12-08 | 2007-06-21 | Bei Sensors & Systems Co Inc | マルチターン用非接触式角度位置センサ |
| JP2007187588A (ja) * | 2006-01-13 | 2007-07-26 | Furukawa Electric Co Ltd:The | 回転センサ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE302937T1 (de) | 2000-06-16 | 2005-09-15 | Amo Automatisierung Messtechni | Induktives längenmesssystem |
| DE10060574A1 (de) | 2000-12-06 | 2002-06-13 | Heidenhain Gmbh Dr Johannes | Multiturn-Codedrehgeber |
| JP2003202224A (ja) * | 2001-12-28 | 2003-07-18 | Niles Parts Co Ltd | 回転角検出装置 |
| US7098654B2 (en) | 2003-12-24 | 2006-08-29 | Walter Mehnert | Position detector |
| JP4432809B2 (ja) * | 2005-03-17 | 2010-03-17 | パナソニック株式会社 | 回転角度検出装置 |
| JP2007139741A (ja) * | 2005-10-20 | 2007-06-07 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
-
2008
- 2008-07-06 US US12/168,151 patent/US7579829B1/en not_active Expired - Fee Related
-
2009
- 2009-06-29 DE DE102009031012A patent/DE102009031012A1/de not_active Withdrawn
- 2009-07-06 JP JP2009159575A patent/JP4865014B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6247501A (ja) * | 1985-08-27 | 1987-03-02 | S G:Kk | アブソリユ−ト回転位置検出装置 |
| JP2004333478A (ja) * | 2003-05-09 | 2004-11-25 | Dr Johannes Heidenhain Gmbh | 電磁誘導式回転センサ及びこの電磁誘導式回転センサを備えたシャフトエンコーダ |
| JP2007155698A (ja) * | 2005-12-08 | 2007-06-21 | Bei Sensors & Systems Co Inc | マルチターン用非接触式角度位置センサ |
| JP2007187588A (ja) * | 2006-01-13 | 2007-07-26 | Furukawa Electric Co Ltd:The | 回転センサ |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012093716A1 (ja) | 2011-01-07 | 2012-07-12 | オリエンタルモーター株式会社 | 多回転アブソリュート回転角を検出する装置及びその回転角を検出する方法 |
| EP3081906A1 (en) | 2011-01-07 | 2016-10-19 | Oriental Motor Co., Ltd. | Device for detecting multi-turn absolute rotation angle and method for detecting the same |
| US9513142B2 (en) | 2011-01-07 | 2016-12-06 | Oriental Motor Co., Ltd. | Device for detecting multi-turn absolute rotation angle and method for detecting the same |
| US9841947B2 (en) | 2011-07-12 | 2017-12-12 | Oriental Motor Co., Ltd. | Device and method for calculating absolute amount of displacement, and method for same |
| US9528855B2 (en) | 2011-11-14 | 2016-12-27 | Oriental Motor Co., Ltd. | Multi-turn absolute rotation angle detection device and method of detecting absolute rotation angle |
| JP2016151576A (ja) * | 2015-02-16 | 2016-08-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 車両における回転モジュールの回転角度を検出するためのセンサ装置 |
| JP2016220426A (ja) * | 2015-05-21 | 2016-12-22 | オークマ株式会社 | 多回転検出器 |
| US10545033B2 (en) | 2015-05-21 | 2020-01-28 | Okuma Corporation | Multi-turn detector |
| DE102017205423A1 (de) | 2016-04-01 | 2017-10-05 | Fanuc Corporation | Encoder; der infiltration von flüssigkeit mittels licht erfasst |
| US10260912B2 (en) | 2016-04-01 | 2019-04-16 | Fanuc Corporation | Encoder that detects infiltration of liquid by light |
| DE102017205423B4 (de) * | 2016-04-01 | 2021-06-10 | Fanuc Corporation | Encoder, der infiltration von flüssigkeit mittels licht erfasst |
| WO2021079898A1 (ja) * | 2019-10-24 | 2021-04-29 | 日本精機株式会社 | 位置検出装置及び液面検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4865014B2 (ja) | 2012-02-01 |
| US7579829B1 (en) | 2009-08-25 |
| DE102009031012A1 (de) | 2010-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4865014B2 (ja) | 誘導性マルチターン式エンコーダ | |
| JP4733338B2 (ja) | 多回転コードシャフトエンコーダ | |
| EP2527796B1 (en) | Capacitive rotary encoder and method for sensing a rotation angle | |
| JP4464637B2 (ja) | マルチターン・角度測定器 | |
| US8063355B2 (en) | Reflective multi-turn encoders with different light sensing systems | |
| US7365654B2 (en) | Absolute angle detection apparatus | |
| JP5314125B2 (ja) | 誘導式回転角センサおよび誘導式回転角センサを作動させる方法 | |
| JP2006220530A (ja) | 絶対回転角度検出装置 | |
| JP2007516415A (ja) | 磁界依存角度センサを備える装置 | |
| US4740690A (en) | Absolute combinational encoders coupled through a fixed gear ratio | |
| JP2006220529A (ja) | 絶対回転角度およびトルク検出装置 | |
| US20110207578A1 (en) | Harmonic Gear Multi-Turn Encoder | |
| JP2008026039A (ja) | 回転角度検出装置 | |
| US20100222967A1 (en) | Multiturn rotational sensor | |
| US7406772B2 (en) | Device for measuring the position, the path or the rotational angle of an object | |
| EP1925912A2 (en) | Absolute angle detecting apparatus | |
| JP2008128961A (ja) | 絶対角検出装置 | |
| JP2006084348A (ja) | 絶対角検出装置 | |
| US4888986A (en) | Rotational position indicator | |
| JP2007017428A (ja) | 絶対角検出装置 | |
| JP2006322764A (ja) | 絶対角度検出装置 | |
| JP2008275517A (ja) | 多回転絶対角検出装置 | |
| JP2021043194A (ja) | マルチターン測定システム | |
| KR101772205B1 (ko) | 앱솔루트 엔코더 | |
| JP2006322929A (ja) | 絶対角検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111011 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111109 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141118 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| LAPS | Cancellation because of no payment of annual fees |