JP2010044024A - 印刷はんだ検査装置、及び印刷はんだ検査方法 - Google Patents
印刷はんだ検査装置、及び印刷はんだ検査方法 Download PDFInfo
- Publication number
- JP2010044024A JP2010044024A JP2008209923A JP2008209923A JP2010044024A JP 2010044024 A JP2010044024 A JP 2010044024A JP 2008209923 A JP2008209923 A JP 2008209923A JP 2008209923 A JP2008209923 A JP 2008209923A JP 2010044024 A JP2010044024 A JP 2010044024A
- Authority
- JP
- Japan
- Prior art keywords
- measurement point
- solder
- resist
- displacement
- sensing means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Electric Connection Of Electric Components To Printed Circuits (AREA)
Abstract
【解決手段】第1のセンシング手段(OS1,D1,D2)により、プリント板の表面の測定点に垂直に、レジストが透過する波長0.76〜0.9μm内の近赤外光を照射し、測定点からの散乱光を受光する。データ処理部3は、その第1のセンシング手段の出力に基づいてプリント板の表面における各測定点における変位を求める。第2のセンシング手段は、同じ測定点に垂直に対し所定角度斜めの角度で近赤外光を照射し測定点で正反射した正反射光を受光する。測定点判定部5は、その第2のセンシング手段の出力に基づく輝度データにより少なくとも測定点がはんだ箇所であるかレジスト箇所であるかを識別する。測定演算部7は、その識別の結果とデータ処理部が求めた変位とを受けて、レジスト箇所底部の変位を基準として、はんだ箇所の変位を求める。
【選択図】図1
Description
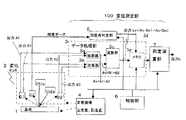
(1)前記変位センサ2が走査機構4の制御により、基板1上をはんだ1b、レジスト1aにかかわりなく相対的に走査する。そして、上記の第1の受光手段D1と第2の受光手段D2で受光する。加算器3aは、第1の受光手段D1の出力A1及び第2の受光手段D2が出力するA2を受けて、Ax=A1+A2を算出して出力する。加算器3bは、第1の受光手段D1の出力B1及び第2の受光手段D2が出力するB2を受けて、Bx=B1+B2を算出して出力する。
ステップS01:パッド1c面にはんだが印刷されたはんだ1bとレジストが塗布されたレジスト1aを有する基板1の表面の測定点に対して、波長が0.76〜0.9μm内のいずれかを有する第1の近赤外光源OS1aにより光(近赤外光)を垂直に照射し、その散乱反射光を第1の受光手段D1及びD2で受光し、一方第2の近赤外光源OS2aにより光(近赤外光)を斜めに照射し、その正反射光を第3の受光手段D3で受光する変位センサ2を準備する。
上記では、測定点の変位を算出した後に、測定点判定部5の判定結果に基づいて、はんだ1bとレジスト1aに振り分けて、レジスト1aの底部からのはんだ1bの高さを求める構成であった。しかし、測定点判定部5の判定結果に基づいて、変位センサ2の出力、加算器3a、3bの出力のいずれでもはんだ1bとレジスト1aの各データに振り分けができる。したがって、振り分けて加算器3a、3b及び演算部3cで演算し、その結果から、レジスト1aの底部からのはんだ1bの高さを求める構成であっても良い。
変位センサ2の他の実施形態としての変位センサ2aを図3に示す。図3(a)は変位センサ2aを上面から見た図で、図3(b)は側面から見た図で、いずれも各素子間の光路を示す図である。図3(c)は、図3(b)の矢視A又は矢視Bから見た光路を示す図である。図3において、図1と同一符号の要素は同一機能を有する。
3a、3b 加算器、 3c 演算部、 3d メモリ、
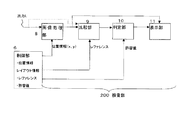
4 走査機構、 6 制御部、 7 測定演算部、 8 画像処理部、 9 比較部、 10 判定部、 11 表示部、 100 変位測定部、 200 検査部、
D1 第1の受光手段、D2 第2の受光手段、D3 第3の受光手段、
K1a,K2a,K3a 受光レンズ
K1b,K2b,K3b 結像レンズ
OSC1a レーザ(近赤外光)、 OSC1b ハーフミラー、
OSC1c,OSC1d,OSC1e、OSC1g ミラー
OSC2a,OSC2b ミラー
OSC1f,OSC2c fθレンズ
PM ポリゴンミラー
Claims (4)
- パッド面にはんだが印刷されたはんだ箇所とレジストが塗布されたレジスト箇所を有するプリント板の表面の測定点に垂直に、前記レジストが透過する波長0.76〜0.9μm内の近赤外光を照射し、該測定点からの散乱光を受ける第1のセンシング手段(OS1,D1,D2)と、前記測定点と同じ測定点に前記垂直に対し所定角度斜めの角度で前記近赤外光を照射し該測定点で正反射した正反射光を受ける第2のセンシング手段(OS2,D3)とを含む変位センサ(2)と、
第1のセンシング手段の出力に基づいて前記プリント板の表面における各測定点における変位を求めるデータ処理部(3)と、
前記第2のセンシング手段の出力に基づく輝度データにより少なくとも前記測定点がはんだ箇所であるかレジスト箇所であるかを識別する測定点判定部(5)と、
該識別の結果と前記データ処理部が求めた変位とを受けて、前記レジスト箇所を測定点としたときの該レジスト箇所底部にあるパッド面に対する前記はんだ箇所の高さを求める測定演算部(7)と、を備えたことを特徴とする印刷はんだ検査装置。 - 前記第1のセンシング手段は測定点の輝度データを出力し、
前記測定点判定部は、該第1のセンシング手段の輝度データ及び前記第2のセンシング手段の輝度データを基に、予め記憶していた閾値と比較することにより、前記測定点が前記はんだ箇所と前記レジスト底部の前記パッド面とを識別し、
前記測定演算部は、該識別の結果と前記データ処理部が求めた変位を基に、該パッド面からの該はんだ箇所の高さを求めることを特徴とする請求項1に記載の印刷はんだ検査装置。 - パッド面にはんだが印刷されたはんだ箇所とレジストが塗布されたレジスト箇所を有するプリント板の該表面の測定点に垂直に前記レジストが透過する波長0.76〜0.9μm内の近赤外光を照射し、該測定点からの散乱光を受ける第1のセンシング手段(OS1,D1,D2)と、前記測定点と同じ測定点に前記垂直に対し所定角度斜めの角度で前記近赤外光を照射し該測定点で正反射した正反射光を受ける第2のセンシング手段(OS2,D3)とを含む変位センサ(2)と、
前記第2のセンシング手段の出力に基づく輝度データにより少なくとも前記測定点がはんだ箇所であるかレジスト箇所であるかを識別する測定点判定部(5)を有し、該識別結果を受けて、前記レジスト箇所を測定点として該測定点の底部にある前記パッド面からの散乱光を受光したときの前記第1のセンシング手段の出力を基に前記パッド面の変位を算出し、さらに、前記はんだ箇所を測定点として該はんだ箇所からの散乱光を受光したときの該第1のセンシング手段の出力に基づいて、該パッド面からの該はんだ箇所の高さ求める変位測定部(100)と、を備えたことを特徴とする印刷はんだ検査装置。 - パッド面にはんだが印刷されたはんだ箇所とレジストが塗布されたレジスト箇所を有するプリント板の該表面の測定点に垂直に前記レジストが透過する波長0.76〜0.9μm内の近赤外光を照射し、該測定点からの散乱光を受ける第1のセンシング手段(OS1,D1,D2)と、前記測定点と同じ測定点に前記垂直に対し所定角度斜めの角度で前記近赤外光を照射し該測定点で正反射した正反射光を受ける第2のセンシング手段(OS2,D3)とを含む変位センサ(2)を準備する段階と、
前記変位センサを、前記はんだ箇所及びレジスト箇所を含む前記プリント基板上を相対的に走査させて、前記第1のセンシング手段の出力と前記第2のセンシング手段の出力を取得する走査段階と、
第1のセンシング手段の出力に基づいて前記走査された各測定点における変位を求める変位演算段階と、
前記第2のセンシング手段の出力に基づいて前記測定点がはんだ箇所であるかレジスト箇所であるかを識別する測定点判定段階と、
該識別結果と前記変位演算段階で求めた変位とを受けて、前記レジスト箇所を測定点としたときの該レジスト箇所底部にある前記パッド面の変位と、前記はんだ箇所の変位とから、該パッド面からの該はんだ箇所の高さを求める測定演算段階と、を備えたことを特徴とする印刷はんだ検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209923A JP5129689B2 (ja) | 2008-08-18 | 2008-08-18 | 印刷はんだ検査装置、及び印刷はんだ検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209923A JP5129689B2 (ja) | 2008-08-18 | 2008-08-18 | 印刷はんだ検査装置、及び印刷はんだ検査方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010044024A true JP2010044024A (ja) | 2010-02-25 |
| JP5129689B2 JP5129689B2 (ja) | 2013-01-30 |
Family
ID=42015518
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008209923A Expired - Fee Related JP5129689B2 (ja) | 2008-08-18 | 2008-08-18 | 印刷はんだ検査装置、及び印刷はんだ検査方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5129689B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020004544A1 (ja) * | 2018-06-29 | 2020-01-02 | 株式会社荏原製作所 | バンプ高さ測定装置、基板処理装置、バンプ高さ測定方法、記憶媒体 |
-
2008
- 2008-08-18 JP JP2008209923A patent/JP5129689B2/ja not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020004544A1 (ja) * | 2018-06-29 | 2020-01-02 | 株式会社荏原製作所 | バンプ高さ測定装置、基板処理装置、バンプ高さ測定方法、記憶媒体 |
| JPWO2020004544A1 (ja) * | 2018-06-29 | 2021-08-12 | 株式会社荏原製作所 | バンプ高さ測定装置、基板処理装置、バンプ高さ測定方法、記憶媒体 |
| JP7213876B2 (ja) | 2018-06-29 | 2023-01-27 | 株式会社荏原製作所 | バンプ高さ測定装置、基板処理装置、バンプ高さ測定方法、記憶媒体 |
| US11604150B2 (en) | 2018-06-29 | 2023-03-14 | Ebara Corporation | Device for measuring bump height, apparatus for processing substrate, method of measuring bump height, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5129689B2 (ja) | 2013-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7641099B2 (en) | Solder joint determination method, solder inspection method, and solder inspection device | |
| JP5754752B2 (ja) | 帯状体の端部位置検出装置及び帯状体の端部位置検出方法 | |
| TWI507660B (zh) | 發光二極體元件的三維視覺檢查方法及三維視覺檢查裝置 | |
| US20100289891A1 (en) | Apparatus for inspecting object under inspection | |
| JP4864734B2 (ja) | 光変位センサー及びそれを用いた変位測定装置 | |
| JP4275661B2 (ja) | 変位測定装置 | |
| JP6748393B2 (ja) | 液体の境界面検出装置 | |
| JP5129689B2 (ja) | 印刷はんだ検査装置、及び印刷はんだ検査方法 | |
| JP2008003650A (ja) | ポインティングデバイス | |
| JP5337419B2 (ja) | 変位測定装置、それを用いたシール部材形状測定装置及びそれらに用いられる変位検出装置 | |
| JP4995041B2 (ja) | 印刷はんだ検査方法、及び印刷はんだ検査装置 | |
| JP2019100753A (ja) | プリント基板検査装置及びプリント基板検査方法 | |
| JP2003501753A (ja) | 指及び/又は掌の表面構造物を検知するための配列構造 | |
| JPH04221705A (ja) | 外観検査装置 | |
| JP5033587B2 (ja) | 印刷はんだ検査装置、及び印刷はんだ検査方法 | |
| JP5509035B2 (ja) | 印刷はんだ検査装置および印刷はんだ検査方法 | |
| JP2006003168A (ja) | 表面形状の測定方法およびその装置 | |
| JP7332417B2 (ja) | 測定装置、及び測定方法 | |
| JPH0894330A (ja) | 非接触外観検査装置及び非接触容量検査装置 | |
| JPH05267117A (ja) | マスクと基板間のギャップ検出・設定方法およびその装置 | |
| JP2006184091A (ja) | 面内方向変位計 | |
| JPH09166424A (ja) | フラットパッケージのピン曲がりの検出装置 | |
| JPH0325739B2 (ja) | ||
| JPH03180707A (ja) | 表面欠陥検出装置 | |
| JPH01202608A (ja) | Icのリード曲がり検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121102 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |