JP2010042376A - 液体と混合物の混合装置及びその混合方法 - Google Patents
液体と混合物の混合装置及びその混合方法 Download PDFInfo
- Publication number
- JP2010042376A JP2010042376A JP2008209562A JP2008209562A JP2010042376A JP 2010042376 A JP2010042376 A JP 2010042376A JP 2008209562 A JP2008209562 A JP 2008209562A JP 2008209562 A JP2008209562 A JP 2008209562A JP 2010042376 A JP2010042376 A JP 2010042376A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- hopper
- mixing tank
- mixture
- mixing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Accessories For Mixers (AREA)
Abstract
【解決手段】真空ポンプ17により混合槽10内の圧力を減圧した状態で、ホッパ5に収容された粉体3を混合槽10内へ供給する際に、ホッパ5内と混合槽10内との圧力差の変動幅Lを算出し、算出した変動幅Lが予め設定された設定変動幅α以上であると判定された場合に、CPU41は真空ポンプ17の設定圧力を上げ、バルブV1の開度を絞り、ホッパ窒素供給コントロールバルブV3の開度を絞り、サーボモータ13を制御して攪拌翼12の回転速度を上げるように構成する。
【選択図】図1
Description
(1)ホッパ内の空気、特に混合物内に混在する空気が混合物とともに減圧された混合槽内に供給されるため、混合槽内で著しい発泡が生じることがあった。それにより、溶存酸素の増加による次工程での不具合が生じる。
(2)また、発泡によって液面上へと混合物や液体が飛散し、混合槽内への混合物、液体の不要な付着による、固形分濃度のバラツキや製造量の低下、及び液体タンクの汚れとそれによる洗浄工程の増加などの問題点が生じる。
(3)更に、発泡することを想定した製造量にするために、混合槽の容量を必要量以上に大きくする必要がある。
(4)一方、発泡を発生させることなく混合槽内の液体に混合物を供給する方法として、混合槽内の圧力を目標値まで減圧し、その後混合物を供給し、混合槽内の圧力が事前に決定された限界値を超えると、混合物の供給を停止し、混合槽内の圧力を目標値まで減圧する、という動作を混合物の供給完了まで繰り返しおこなうことも行われていた。しかし、この方法では、混合物の供給に時間がかかり、リードタイムの長時間化、製品特性のバラツキなどの問題があった。
尚、液体と混合する「混合物」は、粉体でも良いし、液体であっても良い。
先ず、第1実施形態に係る混合装置1について図1に基づき説明する。図1は第1実施形態に係る混合装置1の要部を示す概略側面図である。尚、以下の第1実施形態に示す混合装置1は、予め容器内に貯留された液体に対して粉体を投入し、その後、容器内で液体を攪拌することにより、液体及び投入された粉体を攪拌混合する装置である。
図1に示すように、第1実施形態に係る混合装置1は、液体2を粉体3とともに攪拌する攪拌機4と、粉体3を収容したホッパ5と、攪拌機4及びホッパ5の各種制御を行う制御部6と、種々の条件の入力設定や操作を行う操作部7から基本的に構成されている。
また、制御部6は、回路基板上に配置され予め設定されたプログラムに従って制御動作を行うCPU41、並びに記憶手段であるROM42やRAM43等を備える。また、制御部6には液体2と粉体3の混合条件に応じた攪拌翼12の回転速度、真空ポンプ17の設定圧力Pmin及び真空圧力上限Pmax、設定変動幅α、外浴の温度の設定温度等の種々の設定条件が操作部7から予め入力設定されて、RAM43等のメモリに記憶されている。
尚、攪拌翼を回転駆動させる駆動源としてはサーボモータ13以外であっても、回転数を制御できるモータであれば良い。例えば、インバータ制御モータを用いても良い。
次に、上記構成を有する第1実施形態に係る混合装置1の操作手順について説明する。
(1)バルブV1を閉じた状態で、液体2を混合槽10内に所定量投入する。
(2)サーボモータ13の駆動を開始し、攪拌翼12を予め設定された回転速度で回転させる。尚、混合槽10内の内浴温度の制御が必要な場合は、ジャケット20の制御を開始し、混合槽10の内浴温度が目的の設定温度となるように制御を行う。
(3)粉体供給ライン19の末端まで粉体3の充填状態を均一にするため、窒素を粉体供給ライン19に間欠供給しながらホッパ5に粉体を充填させる。尚、間欠供給はバルブV2の開閉を制御することにより行う。
(4)ホッパ5内の粉体3の充填が終了すると、バルブV2を閉じて、ホッパ5の蓋を閉め、密閉状態にする。
(5)真空ポンプ17の駆動を開始し、混合槽10内の減圧を開始する。
(6)混合槽10内の減圧が設定圧力に到達したら、バルブV1を徐々に開く。同時にホッパ窒素供給コントロールバルブV3も徐々に開き、窒素をホッパ内に供給する。
(7)ホッパ5内と混合槽10内の圧力差ΔPにより、ホッパ内に貯留された粉体3が粉体供給口18を介して混合槽内の液体2に流入する。尚、粉体3とともにホッパ5内の窒素も同時に混合槽内の液体2に流入する。
(8)粉体3および窒素の流入により圧力差ΔPは変動するが、圧力差ΔPの変動幅が設定変動幅α以下になるよう、以下の各制御因子(a)〜(d)を制御する。
(a)真空ポンプ17の設定圧力(変動を減らすために、設定圧を上げる)。但し、設定圧力に応じて真空度を調整できる真空ポンプが必要。
(b)バルブV1の開度(変動を減らすために、開度を絞る)。
(c)ホッパ窒素供給コントロールバルブV3の開度(変動を減らすために、開度を緩める)
(d)攪拌翼12の回転数(変動を減らすために、回転数を上げる)
上記各制御因子の制御を行うことによって、圧力差ΔPの変動幅が小さくなり、混合槽10内への粉体吸引時に液上に粉体3が飛散せずに、効率よく混合することができる。
(9)目標量の粉体3の供給が終了したら、バルブV1及びバルブV3を閉じ、真空ポンプ17の駆動を停止し、混合槽10内の圧力を大気圧に回復させる。
続いて、前記構成を有する第1実施形態に係る混合装置1の混合制御に係る各処理について図2及び図3に基づき説明する。図2及び図3は第1実施形態に係る混合装置1の混合制御プログラムのフローチャートである。尚、混合装置1の混合制御プログラムは、操作部7により所定の操作が行われた場合に開始される。また、図2及び図3にフローチャートで示されるプログラムは、制御部6が備えているROM42やRAM43に記憶されており、CPU41により実行される。
(A)液体2を混合槽10内に予め設定された所定量投入する。
(B)サーボモータ13の駆動を開始し、攪拌翼12を予め設定された回転速度で回転させる。
(C)混合槽10内の内浴温度の制御が必要な場合は、ジャケット20による温度制御を開始する。
(D)窒素を粉体供給ライン19に間欠供給しながらホッパ5に予め設定された所定量の粉体を充填させる。尚、間欠供給はバルブV2の開閉を制御することにより行う。
(E)ホッパ5内の粉体3の充填が終了した時点で、バルブV2を閉じて、ホッパ5の蓋を閉め、密閉状態にする。
また、粉体3の混合槽10内への供給を開始する前に、供給される粉体3が通過する粉体供給ライン19に窒素を間欠供給するので、粉体供給ライン19の末端まで粉体3の充填状態を均一にすることができる。従って、その後に実行される粉体と液体との混合処理において、目標量の粉体を液体内に容易に流入させることができる。
次に、第2実施形態に係る混合装置101について図5乃至図10に基づいて説明する。尚、以下の説明において上記図1乃至図4の第1実施形態に係る混合装置1等の構成と同一符号は、前記第1実施形態に係る混合装置1等の構成と同一あるいは相当部分を示すものである。
ただし、第1実施形態に係る混合装置1では、液体が貯留される混合槽10内のみを減圧していたのに対して、第2実施形態に係る混合装置101は、混合槽内に加えてホッパ内も減圧する点で前記第1実施形態に係る混合装置1と異なっている。
図5に示すように、第2実施形態に係る混合装置101は、液体2を粉体3とともに攪拌する攪拌機104と、粉体3を収容したホッパ105と、攪拌機104及びホッパ105の各種制御を行う制御部106と、種々の条件の入力設定や操作を行う操作部107から基本的に構成されている。
また、粉体供給ライン122には、粉体供給口121付近に粉体流量計(供給速度検出手段)135が取り付けられている。そして、粉体流量計135は、ホッパ105に貯留された粉体3が混合槽110へと供給される単位時間当たりの供給量(即ち、供給速度)を検出する。
また、制御部106は、回路基板上に配置され予め設定されたプログラムに従って制御動作を行うCPU141、並びに記憶手段であるROM142やRAM143等を備える。また、制御部106には液体2と粉体3の混合条件に応じた攪拌翼112の回転速度、混合槽110の目標圧力PL、ホッパ105の目標圧力PH、外浴の温度の設定温度等の種々の設定条件が操作部107から予め入力設定されて、RAM143等のメモリに記憶されている。
次に、上記構成を有する第2実施形態に係る混合装置101の操作手順について説明する。
(1)バルブV11を閉じた状態で、液体2を混合槽110内に所定量投入する。
(2)サーボモータ113の駆動を開始し、攪拌翼112を予め設定された回転速度で回転させる。尚、混合槽110内の内浴温度の制御が必要な場合は、ジャケット123の制御を開始し、混合槽110の内浴温度が目的の設定温度となるように制御を行う。
(3)粉体供給ライン122の末端まで粉体3の充填状態を均一にするため、窒素を粉体供給ライン122に間欠供給しながらホッパ105に粉体を充填させる。尚、間欠供給はバルブV2の開閉を制御することにより行う。
(4)ホッパ5内の粉体3の充填が終了すると、バルブV2を閉じて、ホッパ5の蓋を閉め、密閉状態にする。
(5)真空ポンプ117の駆動を開始し、混合槽減圧コントロールバルブV15を開くことにより混合槽110内の減圧を開始する。
(6)更に、混合槽窒素供給コントロールバルブV13を開いて、混合槽110内に窒素を供給し、減圧された混合槽110内の残存空気を窒素に置換する。
(7)その後、混合槽110内の圧力を目標圧力(例えば20kPa abs)に近づけ、安定させるために、後述の図8に示す表に従って混合槽窒素供給コントロールバルブV13と混合槽減圧コントロールバルブV15の開度を調整する。
(8)真空ポンプ129の駆動を開始し、ホッパ減圧コントロールバルブV16を開くことによりホッパ105内の減圧を開始する。
(9)更に、ホッパ窒素供給コントロールバルブV14を開いて、ホッパ105内に窒素を供給し、減圧されたホッパ105内の残存空気を窒素に置換する。
(10)その後、ホッパ105内の圧力を目標圧力(例えば80kPa abs)に近づけ、安定させるために、後述の図9に示す表に従ってホッパ窒素供給コントロールバルブV14とホッパ減圧コントロールバルブV16の開度を調整する。
(11)混合槽110内の圧力P1及びホッパ105内の圧力P2がそれぞれ目標圧力で安定した後に、バルブV11を徐々に開く。
(12)ホッパ105内と混合槽110内の圧力差により、ホッパ内に貯留された粉体3が粉体供給口121を介して混合槽内の液体2に流入する。尚、粉体3とともにホッパ105内の窒素も同時に混合槽内の液体2に流入する。
(13)粉体3および窒素の流入により混合槽110内の圧力P1は上昇し、ホッパ105内の圧力P2は低下する。そこで、混合槽110内の圧力P1を目標圧力(例えば20kPa abs)に近づけ、安定させるために、後述の図8に示す表に従って混合槽窒素供給コントロールバルブV13と混合槽減圧コントロールバルブV15の開度を調整する。また、ホッパ105内の圧力P2を目標圧力(例えば80kPa abs)に近づけ、安定させるために、後述の図9に示す表に従ってホッパ窒素供給コントロールバルブV14とホッパ減圧コントロールバルブV16の開度を調整する。尚、真空ポンプ117や真空ポンプ129の設定圧力を調整することによって、混合槽110内の圧力P1やホッパ105内の圧力P2を目標圧力に近づけ、安定させるようにしても良い。但し、その場合には設定圧力に応じて真空度を調整できる真空ポンプが必要となる。
(14)目標量の粉体3の供給が終了したら、混合槽窒素供給コントロールバルブV13及びホッパ窒素供給コントロールバルブV14を閉じ、真空ポンプ117、129の駆動を停止し、混合槽110内及びホッパ105内の圧力を大気圧に回復させる。
続いて、前記構成を有する第2実施形態に係る混合装置101の混合制御に係る各処理について図6及び図7に基づき説明する。図6及び図7は第2実施形態に係る混合装置101の混合制御プログラムのフローチャートである。尚、混合装置101の混合制御プログラムは、操作部107により所定の操作が行われた場合に開始される。また、図6及び図7にフローチャートで示されるプログラムは、制御部106が備えているROM142やRAM143に記憶されており、CPU141により実行される。
(A)液体2を混合槽110内に予め設定された所定量投入する。
(B)サーボモータ113の駆動を開始し、攪拌翼112を予め設定された回転速度で回転させる。
(C)混合槽110内の内浴温度の制御が必要な場合は、ジャケット123による温度制御を開始する。
(D)窒素を粉体供給ライン122に間欠供給しながらホッパ105に予め設定された所定量の粉体を充填させる。尚、間欠供給はバルブV12の開閉を制御することにより行う。
(E)ホッパ105内の粉体3の充填が終了した時点で、バルブV12を閉じて、ホッパ105の蓋を閉め、密閉状態にする。
例えば、図8に示すように、現在の混合槽110内の圧力P1が目標圧力PLと同値であった場合には、混合槽減圧コントロールバルブV15の開度を30%に調整し、混合槽窒素供給コントロールバルブV13の開度を40%に調整する。また、現在の混合槽110内の圧力P1が目標圧力PLより5kPa未満高い場合には、混合槽減圧コントロールバルブV15の開度を40%に調整し、混合槽窒素供給コントロールバルブV13の開度を35%に調整する。また、現在の混合槽110内の圧力P1が目標圧力PLより5kPa以上10kPa未満低い場合には、混合槽減圧コントロールバルブV15の開度を10%に調整し、混合槽窒素供給コントロールバルブV13の開度を60%に調整する。
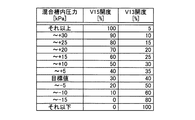
また、図9に示すように、現在のホッパ105内の圧力P2が目標圧力PHより15kPa以上20kPa未満高い場合には、ホッパ減圧コントロールバルブV16の開度を70%に調整し、ホッパ窒素供給コントロールバルブV14の開度を20%に調整する。また、現在のホッパ105内の圧力P2が目標圧力PHより15kPa以上低い場合には、ホッパ減圧コントロールバルブV16の開度を0%に調整し、ホッパ窒素供給コントロールバルブV14の開度を100%に調整する。尚、S127においては、真空ポンプ117や真空ポンプ129の設定圧力を調整することによって、混合槽110内の圧力P1やホッパ105内の圧力P2を設定圧力に近づけ、安定させるようにしても良い。但し、その場合には設定圧力に応じて真空度を調整できる真空ポンプが必要となる。
図10に示すように、混合槽110内の圧力は、粉体3の供給を開始した直後に高圧力側に大きく変動するが、混合槽110内へ流入する窒素流量を調整することによって、徐々に目標圧力である20kPa absに収束する。
一方、ホッパ105内の圧力は、粉体3の供給を開始した直後に低圧力側に大きく変動するが、ホッパ105内へ流入する窒素流量を調整することによって、徐々に目標圧力である80kPa absに収束する。
また、減圧された混合槽110内の残存空気及び減圧されたホッパ105内の残存空気を窒素に置換するので、粉体3を液体2に供給する際に粉体3とともに液体2内へと供給される酸素量を更に減少させることが可能となる。
また、混合槽窒素供給コントロールバルブV13及びホッパ窒素供給コントロールバルブV14の開度を調整することにより、混合槽110内の圧力がホッパ105内の圧力より低くなるように混合槽110内及びホッパ105内へと供給される各窒素供給量を制御するので、混合槽110内へと粉体3をスムーズに流入させることが可能となる。また、粉体3を液体2に供給する際に粉体3とともに液体2内へと供給される酸素量を減少させることが可能となる。
例えば、第2実施形態では、混合槽110内の圧力と目標圧力との差異及びホッパ105内の圧力と目標圧力との差異に基づいて混合槽110内及びホッパ105内を減圧するための各減圧手段(真空ポンプやバルブ)を制御することとしていたが、粉体流量計135によりホッパ105に貯留された粉体3が混合槽110へと供給される単位時間当たりの供給量(即ち、供給速度)を検出し、検出した粉体の供給速度の目標値からの偏差並びに粉体の供給速度の変化率に基づいて混合槽110内及びホッパ105内を減圧するための各減圧手段を制御するようにしても良い。それにより、粉体の供給速度を目標値へと近づけることが可能となる。その結果、液体の種類や量に応じた適切な速度で粉体を供給することができ、一定の製品特性を保つことが可能となる。
2 液体
3 粉体
5、105 ホッパ
6、106 制御部
10、110 混合槽
41、141 CPU
42、142 ROM
43、143 RAM
Claims (26)
- 液体が貯留される混合槽と、
前記混合槽に接続され、混合物を収容したホッパと、
前記混合槽に貯留される液体の液面下に形成され、前記ホッパに収容された混合物を前記混合槽内へ供給する混合物供給口と、
前記混合槽内の圧力を減圧する混合槽減圧手段と、
前記混合槽内の圧力を検出する第1圧力検出手段と、
前記ホッパ内の圧力を検出する第2圧力検出手段と、
前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差に基づいて、前記混合槽減圧手段を制御する混合槽減圧制御手段と、を有することを特徴とする液体と混合物の混合装置。 - 前記混合槽減圧制御手段は、前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記混合槽減圧手段を制御することを特徴とする請求項1に記載の液体と混合物の混合装置。
- 前記混合槽内に配置され、回転に伴って混合槽内に貯留された液体を攪拌する攪拌翼と、
前記攪拌翼を所定の回転周期で回転軸を中心に回転駆動させる駆動手段と、
前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差に基づいて、前記駆動手段を制御する駆動制御手段と、を有することを特徴とする請求項1又は請求項2に記載の液体と混合物の混合装置。 - 前記駆動制御手段は、前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記駆動手段を制御することを特徴とする請求項3に記載の液体と混合物の混合装置。
- 前記ホッパ内へ供給する窒素の流量を調整するホッパ窒素流量調整手段と、
前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差に基づいて、前記ホッパ窒素流量調整手段を制御するホッパ窒素流量調整制御手段と、を有することを特徴とする請求項1乃至請求項4のいずれかに記載の液体と混合物の混合装置。 - 前記ホッパ窒素流量調整制御手段は、前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記ホッパ窒素流量調整手段を制御することを特徴とする請求項5に記載の液体と混合物の混合装置。
- 前記ホッパから前記混合槽への混合物供給量を調整する混合物供給量調整手段と、
前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差に基づいて、前記混合物供給量調整手段を制御する混合物供給量調整制御手段と、を有することを特徴とする請求項1乃至請求項6のいずれかに記載の液体と混合物の混合装置。 - 前記混合物供給量調整制御手段は、前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記混合物供給量調整手段を制御することを特徴とする請求項7に記載の液体と混合物の混合装置。
- 前記混合物供給口を介して前記ホッパと前記混合槽とを連絡し、前記ホッパから前記混合槽へと供給される混合物が通過する混合物供給路と、
前記混合物供給路に形成され、混合物供給路内に窒素を供給する窒素供給口と、を有し、
前記窒素供給口から窒素を前記混合物供給路に間欠供給することを特徴とする請求項1乃至請求項8のいずれかに記載の液体と混合物の混合装置。 - 液体が貯留される混合槽と、
前記混合槽に接続され、混合物を収容したホッパと、
前記混合槽内に貯留される液体の液面下に形成され、前記ホッパに収容された混合物を前記混合槽内へ供給する混合物供給口と、
前記混合槽内の圧力を減圧する混合槽減圧手段と、
前記ホッパ内の圧力を減圧するホッパ減圧手段と、
前記混合槽内の圧力が前記ホッパ内の圧力より低くなるように前記混合槽減圧手段及び前記ホッパ減圧手段を制御する減圧制御手段と、を有することを特徴とする液体と混合物の混合装置。 - 前記混合槽減圧手段により減圧された混合槽内の残存空気及び前記ホッパ減圧手段により減圧されたホッパ内の残存空気を窒素に置換する窒素置換手段を有することを特徴とする請求項10に記載の液体と混合物の混合装置。
- 前記ホッパから前記混合槽への混合物の供給速度を検出する供給速度検出手段を有し、
前記減圧制御手段は、前記混合物の供給速度の目標値からの偏差並びに混合物の供給速度の変化率に基づいて、前記混合槽減圧手段及びホッパ減圧手段を制御することを特徴とする請求項10又は請求項11に記載の液体と混合物の混合装置。 - 前記混合槽内へ供給する窒素の流量を調整する混合槽窒素流量調整手段と、
前記ホッパ内へ供給する窒素の流量を調整するホッパ窒素流量調整手段と、
前記混合槽窒素流量調整手段及び前記ホッパ窒素流量調整手段を制御することにより、前記混合槽内の圧力及び前記ホッパ内の圧力を調整する窒素流量調整制御手段と、を有することを特徴とする請求項10乃至請求項12のいずれかに記載の液体と混合物の混合装置。 - 混合槽に貯留される液体の液面下に形成された混合物供給口を介して、ホッパに収容された混合物を前記混合槽内へ供給する液体及び混合物の混合方法において、
前記混合槽内の圧力を検出する第1圧力検出ステップと、
前記ホッパ内の圧力を検出する第2圧力検出ステップと、
前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差に基づいて、前記混合槽内の圧力を減圧する混合槽減圧ステップと、を有することを特徴とする液体と混合物の混合方法。 - 前記混合槽減圧ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記混合槽内の圧力を減圧することを特徴とする請求項14に記載の液体と混合物の混合方法。
- 前記混合槽内に配置された攪拌翼を所定の回転周期で回転軸を中心に回転駆動させ、混合槽内に貯留された液体を攪拌する攪拌ステップを有し、
前記攪拌ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差に基づいて、前記回転周期を変動させることを特徴とする請求項14又は請求項15に記載の液体と混合物の混合方法。 - 前記攪拌ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記回転周期を変動させることを特徴とする請求項16に記載の液体と混合物の混合方法。
- 前記ホッパ内に窒素を供給するホッパ窒素供給ステップを有し、
前記ホッパ窒素供給ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差に基づいて、前記ホッパ内に供給される窒素の流量を調整することを特徴とする請求項14乃至請求項17のいずれかに記載の液体と混合物の混合方法。 - 前記ホッパ窒素供給ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記窒素の流量を調整することを特徴とする請求項18に記載の液体と混合物の混合方法。
- 前記第1圧力検出手段により検出した前記混合槽内の圧力と前記第2圧力検出手段により検出した前記ホッパ内の圧力との圧力差に基づいて、前記ホッパから前記混合槽への混合物供給量を調整する混合物供給量調整ステップを有することを特徴とする請求項14乃至請求項19のいずれかに記載の液体と混合物の混合方法。
- 前記混合物供給量調整ステップは、前記第1圧力検出ステップにより検出した前記混合槽内の圧力と前記第2圧力検出ステップにより検出した前記ホッパ内の圧力との圧力差の変動を軽減するように前記ホッパから前記混合槽への混合物供給量を調整することを特徴とする請求項20に記載の液体と混合物の混合方法。
- 前記混合物供給口を介して前記ホッパと前記混合槽とを連絡し、前記ホッパから前記混合槽へと供給される混合物が通過する混合物供給路に窒素を間欠供給する供給路窒素供給ステップを有することを特徴とする請求項14乃至請求項21のいずれかに記載の液体と混合物の混合方法。
- 混合槽に貯留される液体の液面下に形成された混合物供給口を介して、ホッパに収容された混合物を前記混合槽内へ供給する液体及び混合物の混合方法において、
前記混合槽内の圧力が前記ホッパ内の圧力より低くなるように前記混合槽内の圧力及び前記ホッパ内の圧力を減圧する減圧ステップを有することを特徴とする液体と混合物の混合方法。 - 前記減圧ステップにより減圧された混合槽内の残存空気及びホッパ内の残存空気を窒素に置換する窒素置換ステップを有することを特徴とする請求項23に記載の液体と混合物の混合方法。
- 前記ホッパから前記混合槽への混合物の供給速度を検出する供給速度検出ステップを有し、
前記減圧ステップは、前記混合物の供給速度の目標値からの偏差並びに混合物の供給速度の変化率に基づいて、前記混合槽内の圧力及び前記ホッパ内の圧力を減圧することを特徴とする請求項23又は請求項24に記載の液体と混合物の混合方法。 - 前記混合槽内に供給される窒素の流量及び前記ホッパ内に供給される窒素の流量を調整することにより、前記混合槽内の圧力及び前記ホッパ内の圧力を調整する圧力調整ステップを有することを特徴とする請求項23乃至請求項25のいずれかに記載の液体と混合物の混合方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209562A JP5017694B2 (ja) | 2008-08-18 | 2008-08-18 | 液体と混合物の混合装置及びその混合方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209562A JP5017694B2 (ja) | 2008-08-18 | 2008-08-18 | 液体と混合物の混合装置及びその混合方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010042376A true JP2010042376A (ja) | 2010-02-25 |
| JP5017694B2 JP5017694B2 (ja) | 2012-09-05 |
Family
ID=42014199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008209562A Active JP5017694B2 (ja) | 2008-08-18 | 2008-08-18 | 液体と混合物の混合装置及びその混合方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5017694B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013163170A (ja) * | 2012-02-13 | 2013-08-22 | Ohkura Pharmaceutical Co Ltd | 混合液製造方法及びそれを用いた経口ゼリー剤製造方法並びに混合液製造装置 |
| KR101310576B1 (ko) | 2011-10-12 | 2013-09-23 | 삼성전기주식회사 | 액 혼합 시스템 |
| KR101551742B1 (ko) * | 2014-03-21 | 2015-09-11 | 한국표준과학연구원 | 진공 가열 교반장치 및 그 제어방법 |
| WO2021161608A1 (ja) * | 2020-02-10 | 2021-08-19 | 日本スピンドル製造株式会社 | 分散装置及び粉体供給部材 |
| KR20210120270A (ko) * | 2020-03-26 | 2021-10-07 | 구교선 | 전해액 제조용 리튬염 분말의 용해장치 |
| CN117983114A (zh) * | 2024-03-18 | 2024-05-07 | 中国热带农业科学院农业机械研究所 | 一种施肥机的肥料搅拌机构 |
| JP2024142956A (ja) * | 2023-03-30 | 2024-10-11 | プライミクス株式会社 | 攪拌装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59213434A (ja) * | 1983-05-18 | 1984-12-03 | Sumitomo Metal Ind Ltd | 粉粒体の定量切出制御方法 |
| JPH10192682A (ja) * | 1996-12-27 | 1998-07-28 | Ebara Corp | 混合液供給装置 |
| JP2004123846A (ja) * | 2002-09-30 | 2004-04-22 | Nippon Shokubai Co Ltd | 無機粒子分散液の製造方法 |
-
2008
- 2008-08-18 JP JP2008209562A patent/JP5017694B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59213434A (ja) * | 1983-05-18 | 1984-12-03 | Sumitomo Metal Ind Ltd | 粉粒体の定量切出制御方法 |
| JPH10192682A (ja) * | 1996-12-27 | 1998-07-28 | Ebara Corp | 混合液供給装置 |
| JP2004123846A (ja) * | 2002-09-30 | 2004-04-22 | Nippon Shokubai Co Ltd | 無機粒子分散液の製造方法 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101310576B1 (ko) | 2011-10-12 | 2013-09-23 | 삼성전기주식회사 | 액 혼합 시스템 |
| JP2013163170A (ja) * | 2012-02-13 | 2013-08-22 | Ohkura Pharmaceutical Co Ltd | 混合液製造方法及びそれを用いた経口ゼリー剤製造方法並びに混合液製造装置 |
| KR101551742B1 (ko) * | 2014-03-21 | 2015-09-11 | 한국표준과학연구원 | 진공 가열 교반장치 및 그 제어방법 |
| JP7516058B2 (ja) | 2020-02-10 | 2024-07-16 | 日本スピンドル製造株式会社 | 分散装置及び粉体供給部材 |
| JP2021126598A (ja) * | 2020-02-10 | 2021-09-02 | 日本スピンドル製造株式会社 | 分散装置及び粉体供給部材 |
| CN114728246A (zh) * | 2020-02-10 | 2022-07-08 | 日本斯频德制造株式会社 | 分散装置及粉体供给部件 |
| WO2021161608A1 (ja) * | 2020-02-10 | 2021-08-19 | 日本スピンドル製造株式会社 | 分散装置及び粉体供給部材 |
| CN114728246B (zh) * | 2020-02-10 | 2024-10-18 | 日本斯频德制造株式会社 | 分散装置及粉体供给部件 |
| TWI862740B (zh) * | 2020-02-10 | 2024-11-21 | 日商日本紡錘製造股份有限公司 | 分散裝置及粉體供給構件 |
| US12508554B2 (en) | 2020-02-10 | 2025-12-30 | Nihon Spindle Manufacturing Co., Ltd. | Dispersion device and powder feed member |
| KR20210120270A (ko) * | 2020-03-26 | 2021-10-07 | 구교선 | 전해액 제조용 리튬염 분말의 용해장치 |
| KR102382880B1 (ko) * | 2020-03-26 | 2022-04-06 | 구교선 | 전해액 제조용 리튬염 분말의 용해장치 |
| JP2024142956A (ja) * | 2023-03-30 | 2024-10-11 | プライミクス株式会社 | 攪拌装置 |
| JP7761608B2 (ja) | 2023-03-30 | 2025-10-28 | プライミクス株式会社 | 攪拌装置 |
| CN117983114A (zh) * | 2024-03-18 | 2024-05-07 | 中国热带农业科学院农业机械研究所 | 一种施肥机的肥料搅拌机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5017694B2 (ja) | 2012-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5017694B2 (ja) | 液体と混合物の混合装置及びその混合方法 | |
| US6269973B1 (en) | Beverage mixing system | |
| EP3666438B1 (en) | Reduction gas supply device and method for manufacturing completely processed workpiece | |
| CN107200230A (zh) | 一种转盘式连续微量粉体输送装置 | |
| CN107652712A (zh) | 钛白粉包膜系统和方法 | |
| US20170240465A1 (en) | Method for removal of grit in a slaker equipped with a grit collector | |
| CN217292974U (zh) | 一种液体物料自动投料装置 | |
| KR101895361B1 (ko) | 연마분말 자동 공급장치 | |
| US8636846B2 (en) | Aerosol-generating apparatus, film-forming apparatus, and aerosol-generating method | |
| CN205914084U (zh) | 一种能控制淀粉溶液浓度的系统 | |
| JP2018008185A (ja) | 微細物の溶解装置及び溶解方法 | |
| CN109364777B (zh) | 美洛西林钠和舒巴坦钠混粉的制备方法及装置 | |
| CN214304338U (zh) | 一种具有计量功能的泥浆喂料装置 | |
| CN116080962B (zh) | 一种大体积细胞置换分装方法及装置 | |
| CN206778433U (zh) | 一种用于制备粉体的反应釜 | |
| CN114849634B (zh) | 一种胺化反应用反应釜及其使用方法 | |
| CN113164895B (zh) | 提供均匀的含颗粒浆料的方法 | |
| CN214814665U (zh) | 脱模剂的供给装置 | |
| JP2008259988A (ja) | 粉砕処理方法 | |
| CN117414935A (zh) | 一种铝土矿磨矿产线的控制方法及装置 | |
| JP2024013500A (ja) | 撹拌システム及びそれに用いる撹拌槽 | |
| CN103896334A (zh) | 除疤砂的连续加料装置和具有其的氯化法钛白粉生产装置 | |
| JP2006051458A (ja) | 汚泥凝集装置及び方法、薬品供給位置制御装置 | |
| EP4389287A1 (en) | Injecting air into continous mill | |
| JP7616862B2 (ja) | 粉末供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120515 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120521 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5017694 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150622 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |