JP2010041904A - 超音波リニアモータ - Google Patents
超音波リニアモータ Download PDFInfo
- Publication number
- JP2010041904A JP2010041904A JP2008228800A JP2008228800A JP2010041904A JP 2010041904 A JP2010041904 A JP 2010041904A JP 2008228800 A JP2008228800 A JP 2008228800A JP 2008228800 A JP2008228800 A JP 2008228800A JP 2010041904 A JP2010041904 A JP 2010041904A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- vibration member
- linear motor
- ultrasonic linear
- motor according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 claims abstract description 99
- 125000006850 spacer group Chemical group 0.000 claims description 21
- 239000000463 material Substances 0.000 claims description 11
- 238000004519 manufacturing process Methods 0.000 abstract description 11
- 238000010586 diagram Methods 0.000 description 26
- 230000000694 effects Effects 0.000 description 8
- 230000008901 benefit Effects 0.000 description 4
- 238000005520 cutting process Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000009774 resonance method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/002—Driving devices, e.g. vibrators using only longitudinal or radial modes
Abstract
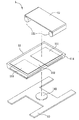
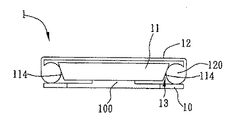
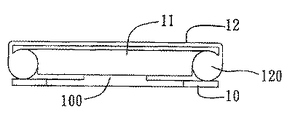
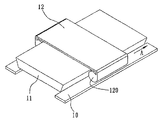
【解決手段】基板と、前記基板上に設けられ、両側に形成された斜面又は曲面と前記基板の表面とで凹状の収容部を形成してなる振動部材と、両側に前記収容部に対向して介在された挟持部が設けられたスライド部材と、を備え、前記振動部材は電源に接続され、駆動動力を前記スライド部材に生成することで、前記スライド部材の挟持部を前記収容部内にスライドさせ、リニア運動を生成する。
【選択図】図2
Description
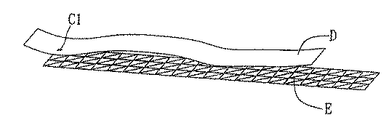
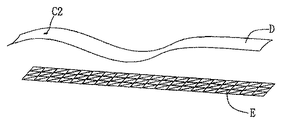
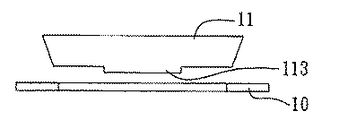
10 基板
100 突出部
11 振動部材
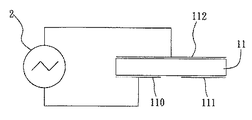
110 第1の電極
111 第2の電極
112 接地電極
113 突出部
114 斜面
12 スライド部材
120 挟持部
13 収容部
14 スペーサー
2 電源
A、B 矢印
C1、C2、C3、C4 ブロック
Claims (25)
- 基板と、
前記基板上に設けられ、両側に形成された斜面又は曲面と前記基板の表面とで凹状の収容部を形成してなる振動部材と、
両側に前記収容部に対向して介在された挟持部が設けられたスライド部材と、を備え、
前記振動部材は電源に接続され、駆動動力を前記スライド部材に生成することで、前記スライド部材の挟持部を前記収容部内にスライドさせ、リニア運動を生成することを特徴とする超音波リニアモータ。 - 前記基板と前記振動部材との間は、一部の表面だけが固定され合っていることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記基板と前記振動部材との間は、少なくとも1つのスペーサーを介して固定され、前記スペーサーが、前記振動部材又は前記基板の一部の表面に接着された任意の幾何形状であることを特徴とする請求項2に記載の超音波リニアモータ。
- 前記基板が、前記振動部材と固定され合うように少なくとも1つのスペーサーを有し、前記スペーサーが、前記振動部材の一部の表面に接着された任意の幾何形状であることを特徴とする請求項2に記載の超音波リニアモータ。
- 前記振動部材が、前記基板と固定され合うように少なくとも1つのスペーサーを有し、前記スペーサーが、前記基板の一部の表面に接着された任意の幾何形状であることを特徴とする請求項2に記載の超音波リニアモータ。
- 前記収容部が、内凹のL形構造であり、前記振動部材の両側と基板との間に形成された挟み角であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記収容部が形成された前記基板の表面は、平面又は任意の曲面であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記スライド部材が前記収容部に接触した挟持部の表面は、平面又は任意の曲面であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記基板及び前記振動部材が、板状又は殻状であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記振動部材の材料が、圧電材料であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記電源が、前記振動部材の共振周波数を有する振動電圧であることを特徴とする請求項1に記載の超音波リニアモータ。
- 前記振動部材の前記基板に対向した表面は、隣接した第1の電極及び第2の電極を有し、前記振動部材の前記スライド部材に対向した表面は接地電極を有し、前記第1の電極及び前記第2の電極のいずれか一つ及び前記接地電極は前記電源に接続されていることを特徴とする請求項11に記載の超音波リニアモータ。
- 前記振動部材の前記基板に対向した表面は、接地電極を有し、前記振動部材の前記スライド部材に対向した表面は隣接した第1の電極及び第2の電極を有し、前記第1の電極及び前記第2の電極のいずれか一つ及び前記接地電極は前記電源に接続されていることを特徴とする請求項11に記載の超音波リニアモータ。
- 基板と、
前記基板上に設けられ、両側の表面が斜面又は曲面である振動部材と、
両側に前記振動部材の両側表面に対向して介在された挟持部が設けられたスライド部材と、を備え、
前記振動部材は電源に接続され、駆動動力を前記スライド部材に生成することで、前記スライド部材の挟持部を前記振動部材の両側表面及び前記基板表面に対してスライドさせ、リニア運動を生成することを特徴とする超音波リニアモータ。 - 前記基板と前記振動部材との間は、一部の表面だけが固定され合っていることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記基板と前記振動部材との間は、少なくとも1つのスペーサーを介して固定され、前記スペーサーが、前記振動部材又は前記基板の一部の表面に接着された任意の幾何形状であることを特徴とする請求項15に記載の超音波リニアモータ。
- 前記基板が、前記振動部材と固定され合うように少なくとも1つのスペーサーを有し、前記スペーサーが、前記振動部材の一部の表面に接着された任意の幾何形状であることを特徴とする請求項15に記載の超音波リニアモータ。
- 前記振動部材が、前記基板と固定され合うように少なくとも1つのスペーサーを有し、前記スペーサーが、前記基板の一部の表面に接着された任意の幾何形状であることを特徴とする請求項15に記載の超音波リニアモータ。
- 前記スライド部材の挟持部が、前記振動部材両側表面及び前記基板表面に同時に接触していることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記スライド部材の挟持部の表面が、平面又は任意の曲面であることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記基板及び前記振動部材が、板状又は殻状であることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記振動部材の材料が、圧電材料であることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記電源が、前記振動部材の共振周波数を有する振動電圧であることを特徴とする請求項14に記載の超音波リニアモータ。
- 前記振動部材の前記基板に対向した表面は、隣接した第1の電極及び第2の電極を有し、前記振動部材の前記スライド部材に対向した表面は、接地電極を有し、前記第1の電極及び前記第2の電極のいずれか一つ及び前記接地電極は、前記電源に接続されていることを特徴とする請求項23に記載の超音波リニアモータ。
- 前記振動部材の前記基板に対向した表面は、接地電極を有し、前記振動部材の前記スライド部材に対向した表面は隣接した第1の電極及び第2の電極を有し、前記第1の電極及び前記第2の電極のいずれか一つ及び前記接地電極は前記電源に接続されていることを特徴とする請求項23に記載の超音波リニアモータ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW097130000 | 2008-08-07 | ||
| TW097130000A TWI408888B (zh) | 2008-08-07 | 2008-08-07 | 超音波線性馬達 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010041904A true JP2010041904A (ja) | 2010-02-18 |
| JP4798516B2 JP4798516B2 (ja) | 2011-10-19 |
Family
ID=41566910
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008228800A Active JP4798516B2 (ja) | 2008-08-07 | 2008-09-05 | 超音波リニアモータ |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US7816839B2 (ja) |
| JP (1) | JP4798516B2 (ja) |
| DE (1) | DE102008063643B4 (ja) |
| TW (1) | TWI408888B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016082611A (ja) * | 2014-10-10 | 2016-05-16 | キヤノン株式会社 | 駆動装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI408888B (zh) * | 2008-08-07 | 2013-09-11 | Ind Tech Res Inst | 超音波線性馬達 |
| TWI465008B (zh) * | 2010-11-18 | 2014-12-11 | Htc Corp | 手持式電子裝置 |
| UA104667C2 (en) | 2012-09-18 | 2014-02-25 | Сергей Федорович Петренко | Piezoelectric motor |
| WO2016138122A1 (en) | 2015-02-24 | 2016-09-01 | Adaptive Biotechnologies Corp. | Methods for diagnosing infectious disease and determining hla status using immune repertoire sequencing |
| CN105897041B (zh) * | 2016-06-12 | 2017-08-29 | 吉林大学 | 一种具有半弯月形弹性体的定向驱动器 |
| WO2018035134A1 (en) * | 2016-08-15 | 2018-02-22 | Omniome, Inc. | Method and system for sequencing nucleic acids |
| EP3386091B1 (en) * | 2017-04-03 | 2019-07-10 | Physik Instrumente (PI) GmbH & Co. Kg | Piezoelectric vibrator device and piezoelectric motor |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10225150A (ja) * | 1997-02-10 | 1998-08-21 | Minolta Co Ltd | 駆動装置 |
| WO2006050759A1 (de) * | 2004-11-15 | 2006-05-18 | Physik Instrumente (Pi) Gmbh & Co. Kg | Linearer ultraschallmotor |
| WO2006099924A1 (de) * | 2005-03-21 | 2006-09-28 | Physik Instrumente (Pi) Gmbh & Co. Kg | Optische objektivbaugruppe |
| WO2007045525A1 (de) * | 2005-10-21 | 2007-04-26 | Physik Instrumente (Pi) Gmbh & Co. Kg | Ultraschalllinearmotor |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE436675B (sv) * | 1975-08-12 | 1985-01-14 | Ki Politekhnichsky I Im 50 Let | Elektrisk motor driven genom piezoelektriska krafter |
| AT384912B (de) * | 1982-04-16 | 1988-01-25 | Ki Polt I | Piezoelektrischer motor |
| IL106296A0 (en) | 1993-07-09 | 1993-12-28 | Nanomotion Ltd | Ceramic motor |
| ATE306635T1 (de) * | 2001-01-31 | 2005-10-15 | Caterpillar Inc | Piezoelektrischer aktor |
| DE10154526B4 (de) | 2001-06-12 | 2007-02-08 | Physik Instrumente (Pi) Gmbh & Co | Piezoelektrisches Stellelement |
| DE50304468D1 (de) | 2002-03-15 | 2006-09-14 | Miniswys Sa | Piezoelektrischer motor und verfahren zum antrieb desselben |
| JP4511120B2 (ja) | 2002-04-03 | 2010-07-28 | オリンパス株式会社 | 超音波リニアモータ |
| US6747394B2 (en) | 2002-06-19 | 2004-06-08 | Piezomotor Uppsala Ab | Near-resonance electromechanical motor |
| JP4652677B2 (ja) | 2003-09-18 | 2011-03-16 | オリンパス株式会社 | 超音波振動子及びそれを用いた超音波モータ |
| DE102004024656A1 (de) | 2004-05-18 | 2005-12-08 | Physik Instrumente (Pi) Gmbh & Co. Kg | Piezoelektrischer Ultraschallmotor |
| JP4072518B2 (ja) * | 2004-06-09 | 2008-04-09 | キヤノン株式会社 | 振動波駆動装置 |
| DE102004044184B4 (de) * | 2004-08-13 | 2013-02-21 | Physik Instrumente (Pi) Gmbh & Co. Kg | Miniaturisierbarer Motor |
| DE102004059429B4 (de) * | 2004-09-03 | 2006-07-27 | Physik Instrumente (Pi) Gmbh & Co. Kg | Linearer Ultraschall-Piezomotor |
| US20060275521A1 (en) * | 2005-06-03 | 2006-12-07 | Chau-Jong Wang | Hibiscus anthocyanins for inhibiting cancers |
| JP4550850B2 (ja) * | 2007-03-27 | 2010-09-22 | 株式会社東芝 | 圧電モータシステム |
| TWI408888B (zh) * | 2008-08-07 | 2013-09-11 | Ind Tech Res Inst | 超音波線性馬達 |
-
2008
- 2008-08-07 TW TW097130000A patent/TWI408888B/zh active
- 2008-09-05 JP JP2008228800A patent/JP4798516B2/ja active Active
- 2008-11-24 US US12/276,493 patent/US7816839B2/en active Active
- 2008-12-18 DE DE102008063643.6A patent/DE102008063643B4/de active Active
-
2010
- 2010-07-26 US US12/843,239 patent/US20100289382A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10225150A (ja) * | 1997-02-10 | 1998-08-21 | Minolta Co Ltd | 駆動装置 |
| WO2006050759A1 (de) * | 2004-11-15 | 2006-05-18 | Physik Instrumente (Pi) Gmbh & Co. Kg | Linearer ultraschallmotor |
| WO2006099924A1 (de) * | 2005-03-21 | 2006-09-28 | Physik Instrumente (Pi) Gmbh & Co. Kg | Optische objektivbaugruppe |
| WO2007045525A1 (de) * | 2005-10-21 | 2007-04-26 | Physik Instrumente (Pi) Gmbh & Co. Kg | Ultraschalllinearmotor |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016082611A (ja) * | 2014-10-10 | 2016-05-16 | キヤノン株式会社 | 駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4798516B2 (ja) | 2011-10-19 |
| US20100289382A1 (en) | 2010-11-18 |
| DE102008063643B4 (de) | 2015-06-11 |
| TW201008103A (en) | 2010-02-16 |
| US20100033057A1 (en) | 2010-02-11 |
| US7816839B2 (en) | 2010-10-19 |
| DE102008063643A1 (de) | 2010-02-25 |
| TWI408888B (zh) | 2013-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4798516B2 (ja) | 超音波リニアモータ | |
| US7531941B2 (en) | Piezoelectric element and driving apparatus | |
| US7432633B2 (en) | Ultrasonic driving apparatus | |
| WO2010088937A1 (en) | Piezoelectric actuator | |
| US8712092B2 (en) | Magnetic circuit and speaker using same | |
| JP6422248B2 (ja) | 駆動装置及びそれを有するレンズ駆動装置 | |
| JP2008187756A (ja) | アクチュエータケースおよび超音波モータ | |
| US7412157B2 (en) | Lens driving device | |
| JP6576214B2 (ja) | 振動型アクチュエータ、レンズ鏡筒、撮像装置及びステージ装置 | |
| US7522351B2 (en) | Lens driving device | |
| KR20130094123A (ko) | 진동 액추에이터 조립체 및 이를 구비한 디지털 영상 처리 장치 | |
| CN1862941B (zh) | 表面声波直线电动机,电动机组件及其透镜致动器 | |
| CN115484368B (zh) | 成像模组以及电子设备 | |
| CN101651433B (zh) | 超声波线性马达 | |
| WO2022143651A1 (zh) | 压电马达、摄像模组及电子设备 | |
| JP2007114748A (ja) | レンズモジュール | |
| WO2023061479A1 (zh) | 压电驱动器、成像模组及电子设备 | |
| JP2018099002A (ja) | 振動型アクチュエータ、これを有するレンズ鏡筒、撮像装置及びステージ装置 | |
| JPS62157116A (ja) | パ−ツフイ−ダ | |
| CN115379074A (zh) | 光学致动器及相应的摄像模组 | |
| JP2005137100A (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| CN118041120A (en) | Piezoelectric stator, piezoelectric motor, camera and electronic device | |
| JP2008268498A (ja) | レンズモジュール | |
| JP2011091957A (ja) | 駆動装置、及びこれを備えた電子機器 | |
| JP2011043526A (ja) | レンズモジュール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101224 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110607 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110610 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110711 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110721 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140812 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4798516 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |