JP2010039820A - 制御データ発生装置 - Google Patents
制御データ発生装置 Download PDFInfo
- Publication number
- JP2010039820A JP2010039820A JP2008202922A JP2008202922A JP2010039820A JP 2010039820 A JP2010039820 A JP 2010039820A JP 2008202922 A JP2008202922 A JP 2008202922A JP 2008202922 A JP2008202922 A JP 2008202922A JP 2010039820 A JP2010039820 A JP 2010039820A
- Authority
- JP
- Japan
- Prior art keywords
- change
- control data
- scale
- scale characteristic
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008859 change Effects 0.000 claims abstract description 194
- 238000001514 detection method Methods 0.000 claims description 83
- 238000006243 chemical reaction Methods 0.000 claims description 40
- 238000000034 method Methods 0.000 claims description 23
- 230000004044 response Effects 0.000 abstract description 3
- 230000006870 function Effects 0.000 description 26
- 230000007246 mechanism Effects 0.000 description 18
- 230000008569 process Effects 0.000 description 17
- 230000007704 transition Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000012886 linear function Methods 0.000 description 4
- 230000005236 sound signal Effects 0.000 description 4
- 238000004590 computer program Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000013341 scale-up Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B27/00—Editing; Indexing; Addressing; Timing or synchronising; Monitoring; Measuring tape travel
- G11B27/02—Editing, e.g. varying the order of information signals recorded on, or reproduced from, record carriers
- G11B27/031—Electronic editing of digitised analogue information signals, e.g. audio or video signals
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0362—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 1D translations or rotations of an operating part of the device, e.g. scroll wheels, sliders, knobs, rollers or belts
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B27/00—Editing; Indexing; Addressing; Timing or synchronising; Monitoring; Measuring tape travel
- G11B27/02—Editing, e.g. varying the order of information signals recorded on, or reproduced from, record carriers
- G11B27/031—Electronic editing of digitised analogue information signals, e.g. audio or video signals
- G11B27/038—Cross-faders therefor
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B27/00—Editing; Indexing; Addressing; Timing or synchronising; Monitoring; Measuring tape travel
- G11B27/10—Indexing; Addressing; Timing or synchronising; Measuring tape travel
- G11B27/34—Indicating arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04H—BROADCAST COMMUNICATION
- H04H60/00—Arrangements for broadcast applications with a direct linking to broadcast information or broadcast space-time; Broadcast-related systems
- H04H60/02—Arrangements for generating broadcast information; Arrangements for generating broadcast-related information with a direct linking to broadcast information or to broadcast space-time; Arrangements for simultaneous generation of broadcast information and broadcast-related information
- H04H60/04—Studio equipment; Interconnection of studios
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Control Of Position Or Direction (AREA)
- Circuit For Audible Band Transducer (AREA)
- Mechanical Control Devices (AREA)
Abstract
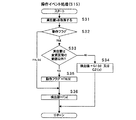
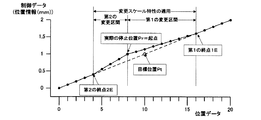
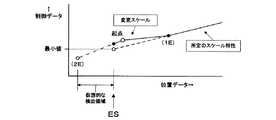
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
【選択図】図2
Description
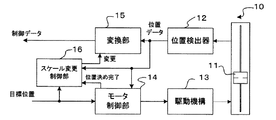
図1は、本発明に係る制御データ発生装置の一実施例である電動フェーダ10のブロック構成を示す。電動フェーダ10は、所定の直線的移動範囲にわたって操作可能なスライド式つまみ(すなわち操作子)11を有しており、該つまみ11は手動操作及び自動操作のいずれも可能な構成である。位置検出器(位置検出手段)12は、該所定の直線的移動範囲におけるつまみ(操作子)11の現操作位置を検出し、検出した現操作位置に応じた位置データをデジタル値で出力する。位置検出器12としては、公知のどのようなタイプの位置検出器を使用してもよい。例えば、可変抵抗器とアナログ/デジタル変換器の組み合わせからなるもの、磁気式リニアエンコーダ、光学式リニアエンコーダ、リニアレゾルバ、などを適宜用いてよい。駆動機構13は、つまみ11を自動的に動かすための電動モータと、該モータの駆動力をつまみ11に直線運動として伝達する機構とを含んでいる。なお、モータは回転モータ又はリニアモータのどちらでもよい。モータ制御部14は、指令された目標位置につまみ11を自動的に動かす(位置決めする)ために、駆動機構13のモータを制御するものであり、通常知られているように、位置検出器12の出力する位置データをフィードバック情報として入力し、つまみ11を目標位置に位置決めするようにフィードバック制御(若しくはサーボ制御)する。駆動機構13とモータ制御部14とで、目標位置につまみ(操作子)11を位置決めする自動位置決め手段を構成している。
リコール指示があると、メモリからリコールすべきシーンの各パラメータ値(シーンデータ)を読み出し、これに基づき各電動フェーダ10の目標位置(Pt)を設定する(S21)。この場合、メモリに記憶されているシーンデータとして、位置検出器12が出力する位置データと同じスケールの目標位置データそのものを記憶している場合は、読み出したシーンデータに含まれる各電動フェーダ10のパラメータ値(つまり目標位置データ)そのものを目標位置データとして設定する。他方、メモリに記憶されているシーンデータとして、変換部15で所定のスケール特性に従って発生した制御データを記憶している場合は、読み出したシーンデータに含まれる各電動フェーダ10のパラメータ値(つまり制御データ)を、当該電動フェーダ10に対応する当該所定のスケール特性に従って位置データに逆変換したものを目標位置データとして設定する。設定された目標位置データは、前記目標位置レジスタに記憶される。なお、このステップS21は、図3のステップS1に対応している。
1E:Pt+D
2E:Pt−D
である。これにより、目標位置Ptが必ず変更スケール特性の適用区間に含まれることになり、前述したような逆行が起こらず、また、第1及び第2の変更区間の長さを適切に確保することで、変更スケール特性から所定のスケール特性への移行を滑らかに行うことができる。
A1=A×D/(1E−Pr)
A2=A×D/(Pr−2E)
ここで、Aは所定のスケール特性の関数F(x)の傾きである。
F(x)=Ax+B
と表わせる。
第1の変更区間に対応する第1の変更スケールを示す関数G1は、
G1(x)=A1x+(A−A1)1E+B
と表わせる。ただし、位置データxは第1の変更区間の範囲内の値。
第2の変更区間に対応する第2の変更スケールを示す関数G2は、
G2(x)=A2x+(A−A2)2E+B
と表わせる。ただし、位置データxは第2の変更区間の範囲内の値。
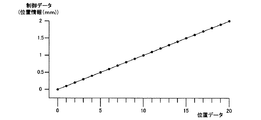
F(x)=(1/10)x+0
A1=(1/10)×6/(16−8)=3/40
A2=(1/10)×6/(8−4)=3/20
G1(x)=3/40x+(2/5)
G2(x)=3/20x−(1/5)
と表わせる。
まず、シーンリコールの後、初めて当該電動フェーダ10が手動操作された場合について説明する。その場合、当該電動フェーダ10に関する「スケール変更制御」の動作フラグは「TRUE」であり(図6のS22)、変更スケール特性が適用されるモードであることを示している。ステップS31で、位置検出器12から出力される現在の位置データ(実位置x)を取得する。ステップS32で動作フラグを判定し、この場合は「TRUE」であるから、ステップS33に行く。ステップS33では、取得した実位置xが第1又は第2の変更区間の範囲外であるかを判定する。第1又は第2の変更区間の範囲内であれば、ステップS34に行き、第1又は第2の変更スケールを示す関数G1又はG2に従ってフェーダ位置検出情報(制御データ)を発生する。すなわち、実位置xが第1の変更区間内にあれば、該第1の変更区間に対応する第1の変更スケールを示す関数G1(x)に従ってフェーダ位置検出情報(制御データ)を発生し、実位置xが第2の変更区間内にあれば、該第2の変更区間に対応する第2の変更スケールを示す関数G2(x)に従ってフェーダ位置検出情報(制御データ)を発生する。以後、電動フェーダ10の操作イベントが発生する毎に、ステップS31,S32,S33,S34のルートの処理が行われ、第1又は第2の変更スケールを示す関数G1(x)又はG2(x)に従ってフェーダ位置検出情報(制御データ)を発生する。
11 スライド式つまみ(操作子)
12 位置検出器
13 駆動機
14 モータ制御部
15 変換部
16 スケール変更制御部
100 電動フェーダ部
101 CPU
Claims (7)
- 所定移動範囲にわたって操作可能な操作子と、
前記所定移動範囲における前記操作子の現操作位置に応じた位置データを出力する位置検出手段と、
前記位置検出手段で検出した位置データを所定のスケール特性で制御データに変換する変換手段と、
指令された目標位置に前記操作子を位置決めする自動位置決め手段であって、この自動位置決め手段による位置決め精度は前記位置検出手段による位置検出精度よりも粗く、そのため、前記位置検出手段による位置検出精度に対して所定の誤差範囲内で前記目標位置への位置決めが行われる前記自動位置決め手段と、
前記自動位置決め手段による位置決め完了時において変更スケール特性を適用するスケール変更制御手段であって、
該変更スケール特性においては、前記位置決め完了時において前記位置検出手段から出力される位置データに対応して前記所定のスケール特性上の前記目標位置に対応する制御データが出力されるように起点を設定すると共に、前記起点の位置から少なくとも前記目標位置に達するまでの区間を含む第1の変更区間を設定し、前記位置検出手段から出力される位置データに対応する前記制御データが、前記起点に対応する制御データから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで第1の変更スケールに従って漸次変化するように変更し、
前記操作子の位置が前記第1の変更区間の終点に達したならば前記変更スケール特性の適用を解除する前記スケール変更制御手段と
備える制御データ発生装置。 - 前記スケール変更制御手段は、更に、前記起点の位置から前記第1の変更区間とは反対側に第2の変更区間を設定し、前記位置検出手段から出力される位置データに対応する前記制御データが、前記起点に対応する制御データから該第2の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで第2の変更スケールに従って漸次変化するように変更し、前記操作子の位置が前記第2の変更区間の終点に達したならば前記変更スケール特性の適用を解除するものである請求項1に記載の制御データ発生装置。
- 前記第1及び第2の変更区間は、前記誤差範囲に対応して設定されることを特徴とする請求項1又は2に記載の制御データ発生装置。
- 前記変換手段は、前記所定のスケール特性において、前記所定移動範囲の両端部の所定範囲の位置データの変化に対して制御データの最小値又は最大値を維持するマージン領域を設定し、
前記第1の変更区間の前記起点が前記マージン領域に入る場合は、前記第1の変更区間についてのみ前記第1の変更スケールに従う前記制御データの発生を行うようにしたことを特徴とする請求項1乃至3のいずれかに記載の制御データ発生装置。 - 前記スケール変更制御手段は、前記所定移動範囲の両端部において各端部を越える仮想的な位置検出領域をそれぞれ設定し、前記所定移動範囲の両端部における前記第2の変更区間を前記仮想的な位置検出領域にわたって設定することを特徴とする請求項1乃至3のいずれかに記載の制御データ発生装置。
- 所定移動範囲にわたって操作可能な操作子と、前記所定移動範囲における前記操作子の現操作位置に応じた位置データを出力する位置検出手段と、指令された目標位置に前記操作子を位置決めする自動位置決め手段であって、この自動位置決め手段による位置決め精度は前記位置検出手段による位置検出精度よりも粗く、そのため、前記位置検出手段による位置検出精度に対して所定の誤差範囲内で前記目標位置への位置決めが行われる前記自動位置決め手段とを備えた操作子装置において、制御データを発生するためのプログラムであって、コンピュータに、
前記位置検出手段で検出した位置データを所定のスケール特性で制御データに変換する第1手順と、
前記自動位置決め手段による位置決め完了時において変更スケール特性を適用する第2手順であって、
該変更スケール特性においては、前記位置決め完了時において前記位置検出手段から出力される位置データに対応して前記所定のスケール特性上の前記目標位置に対応する制御データが出力されるように起点を設定すると共に、前記起点の位置から少なくとも前記目標位置に達するまでの区間を含む第1の変更区間を設定し、前記位置検出手段から出力される位置データに対応する前記制御データが、前記起点に対応する制御データから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで第1の変更スケールに従って漸次変化するように変更し、
前記操作子の位置が前記第1の変更区間の終点に達したならば前記変更スケール特性の適用を解除する前記第2手順と
実行させるためのプログラム。 - 前記第2手順では、前記コンピュータに、更に、前記起点の位置から前記第1の変更区間とは反対側に第2の変更区間を設定し、前記位置検出手段から出力される位置データに対応する前記制御データが、前記起点に対応する制御データから該第2の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで第2の変更スケールに従って漸次変化するように変更し、前記操作子の位置が前記第2の変更区間の終点に達したならば前記変更スケール特性の適用を解除する手順を実行させるようにした請求項6に記載のプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008202922A JP5083108B2 (ja) | 2008-08-06 | 2008-08-06 | 制御データ発生装置 |
| AT09167338T ATE527659T1 (de) | 2008-08-06 | 2009-08-06 | Steuerdatenerzeugungsvorrichtung und verfahren |
| US12/536,716 US8923533B2 (en) | 2008-08-06 | 2009-08-06 | Control data generation device and method |
| EP09167338A EP2151825B1 (en) | 2008-08-06 | 2009-08-06 | Control data generation device and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008202922A JP5083108B2 (ja) | 2008-08-06 | 2008-08-06 | 制御データ発生装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010039820A true JP2010039820A (ja) | 2010-02-18 |
| JP5083108B2 JP5083108B2 (ja) | 2012-11-28 |
Family
ID=41170112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008202922A Expired - Fee Related JP5083108B2 (ja) | 2008-08-06 | 2008-08-06 | 制御データ発生装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8923533B2 (ja) |
| EP (1) | EP2151825B1 (ja) |
| JP (1) | JP5083108B2 (ja) |
| AT (1) | ATE527659T1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015036917A (ja) * | 2013-08-14 | 2015-02-23 | キヤノン株式会社 | 位置決め方法および位置決め装置 |
| CN106681368A (zh) * | 2015-08-07 | 2017-05-17 | 雅马哈株式会社 | 电衰减器驱动单元和驱动方法、衰减器装置、混音器 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2369766A3 (en) * | 2010-03-26 | 2015-07-08 | Yamaha Corporation | Mixer |
| WO2011125357A1 (ja) * | 2010-04-02 | 2011-10-13 | 株式会社安川電機 | エンコーダ、駆動装置、絶対位置算出方法及びエンコーダ製造方法 |
| JP5605186B2 (ja) * | 2010-11-23 | 2014-10-15 | アイシン・エィ・ダブリュ株式会社 | 制御装置、制御装置の制御方法及びコンピュータプログラム |
| US9196236B1 (en) * | 2014-09-02 | 2015-11-24 | Native Instruments Gmbh | Electronic music instrument, system and method for operating an electronic music instrument |
| JP6623608B2 (ja) * | 2015-08-07 | 2019-12-25 | ヤマハ株式会社 | 電動フェーダ駆動装置および電動フェーダ駆動プログラム |
| WO2017156271A1 (en) * | 2016-03-11 | 2017-09-14 | Sound Devices, LLC | Magnetic linear fader |
| US10055034B2 (en) | 2016-06-27 | 2018-08-21 | Google Llc | Haptic feedback system |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2684808B2 (ja) * | 1990-03-09 | 1997-12-03 | ヤマハ株式会社 | モータ駆動式つまみのモータ制御装置 |
| JP2004102569A (ja) * | 2002-09-09 | 2004-04-02 | Yamaha Corp | 電動フェーダ駆動装置 |
| JP2004178395A (ja) * | 2002-11-28 | 2004-06-24 | Yamaha Corp | 操作子位置検出装置および操作子位置制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2630651B2 (ja) * | 1989-07-26 | 1997-07-16 | ヤマハ株式会社 | フェーダ装置 |
| JPH07101827B2 (ja) * | 1989-10-13 | 1995-11-01 | ヤマハ株式会社 | ミキシングコンソール |
| US5243513A (en) * | 1991-04-23 | 1993-09-07 | Peters John M | Automation control with improved operator/system interface |
| GB2269056B (en) * | 1992-07-20 | 1996-06-05 | Sony Corp | Linear control arrangements |
| US5805146A (en) * | 1993-11-05 | 1998-09-08 | Intertactile Technologies Corporation | Integrated display screen and slidable control for electrical circuits |
| DE4438793C2 (de) | 1994-10-18 | 1997-02-13 | Stage Tec Gmbh | Verfahren zum Erkennen eines manuellen Eingriffs an Einrichtungen zum Einstellen von elektrischen Signalen in Regieanlagen und Vorrichtung zur Realisierung des Verfahrens |
| JP3522446B2 (ja) | 1996-05-15 | 2004-04-26 | 松下電器産業株式会社 | フェーダ制御装置 |
| JP3772802B2 (ja) * | 2002-07-02 | 2006-05-10 | ヤマハ株式会社 | 音量設定操作子の駆動装置 |
| US7319765B2 (en) * | 2002-09-06 | 2008-01-15 | Yamaha Corporation | Parameter setting device |
| JP4192757B2 (ja) * | 2003-10-30 | 2008-12-10 | ヤマハ株式会社 | デジタルミキサおよびその制御方法 |
| JP4943670B2 (ja) * | 2005-06-09 | 2012-05-30 | ヤマハ株式会社 | ミキサ装置及びミキサにおけるチャンネルパラメータ設定変更プログラム |
| JP5028931B2 (ja) * | 2006-09-28 | 2012-09-19 | ヤマハ株式会社 | パラメータ設定装置 |
-
2008
- 2008-08-06 JP JP2008202922A patent/JP5083108B2/ja not_active Expired - Fee Related
-
2009
- 2009-08-06 US US12/536,716 patent/US8923533B2/en not_active Expired - Fee Related
- 2009-08-06 AT AT09167338T patent/ATE527659T1/de not_active IP Right Cessation
- 2009-08-06 EP EP09167338A patent/EP2151825B1/en not_active Not-in-force
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2684808B2 (ja) * | 1990-03-09 | 1997-12-03 | ヤマハ株式会社 | モータ駆動式つまみのモータ制御装置 |
| JP2004102569A (ja) * | 2002-09-09 | 2004-04-02 | Yamaha Corp | 電動フェーダ駆動装置 |
| JP2004178395A (ja) * | 2002-11-28 | 2004-06-24 | Yamaha Corp | 操作子位置検出装置および操作子位置制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015036917A (ja) * | 2013-08-14 | 2015-02-23 | キヤノン株式会社 | 位置決め方法および位置決め装置 |
| CN106681368A (zh) * | 2015-08-07 | 2017-05-17 | 雅马哈株式会社 | 电衰减器驱动单元和驱动方法、衰减器装置、混音器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8923533B2 (en) | 2014-12-30 |
| ATE527659T1 (de) | 2011-10-15 |
| EP2151825B1 (en) | 2011-10-05 |
| EP2151825A1 (en) | 2010-02-10 |
| JP5083108B2 (ja) | 2012-11-28 |
| US20100034400A1 (en) | 2010-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5083108B2 (ja) | 制御データ発生装置 | |
| JP3773049B2 (ja) | つまみの位置に応じてデシベルリニアな減衰率データを生成する楽音の減衰率制御装置 | |
| JP5750671B1 (ja) | 撮像装置 | |
| JP2010020502A (ja) | ポインティングデバイス | |
| US9261667B2 (en) | Driving device, projector, and driving method | |
| JP4918789B2 (ja) | パラメータ設定装置及びプログラム | |
| US10224888B1 (en) | Parameter control device and control method | |
| JPH07244534A (ja) | デジタル電圧調整器をパラメタ化する、特に負荷時タップ切換器を有する変圧器を調整する方法 | |
| JPH0778007A (ja) | プログラマブルコントローラ用アナログ信号処理装置 | |
| EP2852056B1 (en) | Quantity adjusting apparatus | |
| JP4101085B2 (ja) | パラメータ設定装置 | |
| JP2009094835A (ja) | タッチパネル付き音響機器 | |
| JP2017175456A (ja) | 信号処理装置 | |
| JP3409865B2 (ja) | テンポ設定装置 | |
| US20090025541A1 (en) | Electronic musical instrument | |
| JP4893666B2 (ja) | パラメータ設定装置及びプログラム | |
| JPH05241662A (ja) | サーボモータ制御装置 | |
| JPH0746066A (ja) | デジタルボリューム | |
| JP4854186B2 (ja) | 携帯型記録媒体再生機器 | |
| JP2002112566A (ja) | モータ制御装置 | |
| JPH07253781A (ja) | 電子楽器 | |
| JP6070186B2 (ja) | レコーダ | |
| JP2006220849A (ja) | アナログメータ式調律器およびアナログメータ式調律器の指針補正方法 | |
| JP2014063044A (ja) | パラメータ編集装置、パラメータ編集方法及びプログラム | |
| JP2005192136A (ja) | ミキシング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110620 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120807 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120820 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150914 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |