JP2010028982A - 電気車制御方法及び電気車制御装置 - Google Patents
電気車制御方法及び電気車制御装置 Download PDFInfo
- Publication number
- JP2010028982A JP2010028982A JP2008188049A JP2008188049A JP2010028982A JP 2010028982 A JP2010028982 A JP 2010028982A JP 2008188049 A JP2008188049 A JP 2008188049A JP 2008188049 A JP2008188049 A JP 2008188049A JP 2010028982 A JP2010028982 A JP 2010028982A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- torque
- torque command
- axle
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Multiple Motors (AREA)
Abstract
【解決手段】トルク指令演算器200から出力されるトルクパタン指令τen *は、動的軸重移動補償制御器700による動的軸重移動補償指令τe_det *と、再粘着制御器400による再粘着指令τe_re *との分だけ引き下げられたインバータトルク指令τen_in *として、ベクトル制御演算器30に入力される。軸重移動演算器600は、トルク指令演算器200から出力されるトルクパタン指令τen *と、ベクトル制御装置30に入力されるインバータトルク指令τen_in *との差Δτe *から、各軸の軸重移動量ΔWnの変動ΔVnを算出する。そして、トルク指令演算器200は、各軸の軸重を軸重変動ΔVnで補正して、トルクパタン指令τen *を算出する。
【選択図】図5
Description
μ=F/W ・・(1)

動力車の各軸それぞれを駆動する電動機を個別にトルク制御する電気車制御方法であって、
各軸の引張力/軸重比の指令値、走行加速度、及び、軸重を含む前記動力車の車両固有定数を用いて、軸重移動を考慮した各軸の引張力/軸重比を前記指令値通りとさせるためのトルク指令を演算するトルク指令演算ステップと、
空転滑走した軸を検出する検出ステップと、
前記検出ステップによる検出がなされた場合に少なくとも空転滑走した軸の前記トルク指令を変更して前記トルク指令を更新する変更ステップと、
前記トルク指令に基づいて、対応する電動機を個別に駆動制御する駆動制御ステップと、
前記トルク指令演算ステップで演算されたトルク指令と前記駆動制御ステップで用いたトルク指令との差、各軸の加速度、及び、前記動力車の前記車両固有定数を用いて、当該トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出する変動量算出ステップと、
を含み、
前記トルク指令演算ステップでは、前記変動量算出ステップで算出された軸重移動の変動量で、対応する各軸の軸重を補正して各軸それぞれのトルク指令を演算する電気車制御方法である。
動力車の各軸それぞれを駆動する電動機を個別にトルク制御する電気車制御装置であって、
各軸の引張力/軸重比の指令値、走行加速度、及び、軸重を含む前記動力車の車両固有定数を用いて、軸重移動を考慮した各軸の引張力/軸重比を前記指令値通りとさせるためのトルク指令を演算するトルク指令演算部と、
空転滑走した軸を検出する検出部と、
前記検出部による検出がなされた場合に、少なくとも空転滑走した軸の前記トルク指令を変更して前記トルク指令を更新するトルク指令変更部と、
前記トルク指令に基づいて、対応する電動機を個別に駆動制御する駆動制御部と、
前記トルク指令演算部で演算されたトルク指令と前記駆動制御部で用いたトルク指令との差、各軸の加速度、及び、前記動力車の前記車両固有定数を用いて、当該トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出する変動量算出部と、
を備え、
前記トルク指令演算部は、前記変動量算出部で算出された軸重移動の変動量で、対応する各軸の軸重を補正して各軸それぞれのトルク指令を演算する電気車制御装置である。
前記トルク指令演算ステップは、以下1)〜5)の運動量を表す各軸それぞれ個別の数式モデルでなる軸重移動量数式モデルに基づく所定の軸重移動補償トルク演算を行って、各軸それぞれのトルク指令を算出するステップである電気車制御方法を構成しても良い。
1)電動機トルクによって歯車の間に伝わる力の車軸伝達成分
2)電動機トルクによって歯車の間に伝わる力の反力のうちの電動機支持部への伝達成分
3)2)の力による台車枠重心回り回転モーメントにより作用する力
4)引張力による台車枠重心回り回転モーメントによる軸重移動量
5)全軸の引張力による車体重心回り回転モーメントによる軸重移動量
前記変動量算出ステップは、以下1)〜5)の運動量を表す各軸それぞれ個別の数式モデルでなる軸重移動量数式モデルに基づいて、前記トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出するステップである電気車制御方法を構成しても良い。
1)電動機トルクによって歯車の間に伝わる力の車軸伝達成分
2)電動機トルクによって歯車の間に伝わる力の反力のうちの電動機支持部への伝達成分
3)2)の力による台車枠重心回り回転モーメントにより作用する力
4)引張力による台車枠重心回り回転モーメントによる軸重移動量
5)全軸の引張力による車体重心回り回転モーメントによる軸重移動量
前記変更ステップは、
空転滑走した軸のトルクを一時的に引き下げて再粘着させる制御を行う再粘着制御ステップと、
空転滑走した軸の空転滑走の程度を表す加速度、空転滑走速度又はこれらの相当値でなる空転滑走指標値を用いて空転滑走していない健全軸のトルク変更量を算出する算出ステップと、
前記健全軸のトルクを一時的に前記トルク変更量分変更して空転滑走の誘発を抑制する制御を行う誘発抑制制御ステップと、
を含む電気車制御方法を構成しても良い。
前記算出ステップは、前記空転滑走指標値と、動力車の各台車及び当該台車内の各軸の配置構成によって定まる空転滑走した軸と健全軸間の動的な軸重移動量を考慮した軸重移動係数とを用いて、健全軸の前記トルク変更量を算出するステップである電気車制御方法を構成しても良い。
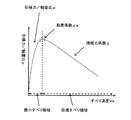
電車や電気機関車等の電気車(動力車)は、車輪・レール間に働く引張力(粘着力ともいう)によって加減速を行う。引張力/軸重比が粘着係数以下の範囲であれば粘着走行がなされるが、粘着係数を超えた場合には空転滑走が発生する。空転滑走が発生した場合には、電動機のトルクを引き下げて粘着走行に復帰させる「再粘着制御」が行われる。以下では、引張力を、いわゆる粘着力である引張力Flnと、電動機の発生トルクが動力伝達機構を経て動輪踏面に伝えられる動輪周引張力Fmnとに分ける。動輪周引張力Fmnは、歯車比と車輪径とから算出され、引張力(粘着力)Flnは、動輪周引張力Fmnから等価慣性質量と加速度の積を引いたものとなる。
μ=Fln/(W0+ΔW) ・・(3)
ここで、Flnは引張力、W0は静止軸重、ΔWは軸重移動量である。軸重移動量ΔWは、電車の走行に応じて変動する。本実施形態の電動機トルク制御は、この軸重移動量ΔWの変動を考慮したものであり、具体的には、軸重移動量ΔWの変動を動的に考慮した「静的軸重移動補償制御」と、軸重移動による空転滑走の誘発抑制のための「動的軸重移動補償制御」とを含んでいる。この2つの制御は独立して行われる。以下、これら2つの制御の原理を説明する。
先ず、静的軸重移動補償制御について説明する。上述のように、軸重移動量ΔWは電車の走行に応じて変動する。静的軸重移動補償制御は、このリアルタイムに変動する軸重移動量ΔWを動的に考慮して各軸の引張力を適切に配分することで、各軸の引張力/軸重比μを一定に保つものである。
電動機の回転力(トルク)による小歯車が大歯車を押す力は、車軸へ直接伝達される成分と、電動機が支持されている電動機支持部へ伝達される成分とに分かれて作用する。前者の力がこの(1)の力であり、後者の力が(2)の力となる。具体的には、第n軸において小歯車が大歯車を押す力を「Fen」とすると、大歯車の半径R、軸箱・ノーズ間距離aに基づく所定比率の力が、各軸の(1)の力となる。
上述のように、電動機の回転力(トルク)による小歯車が大歯車を押す力のうち、電動機支持部へ伝達される成分が、この(2)の力である。例えば、吊り掛け式台車の場合、電動機支持部は台車枠のノーズ受け部になる。従って、各台車において前後の軸における小歯車が大歯車を押す力Fenのうち、大歯車半径R、軸箱・ノーズ間距離a、台車の車軸間距離lに基づく所定比率の力が、各軸の2)の力となる。
(2)の台車枠重心回り方向の力によって台車枠の重心回り回転モーメントが生じるため、この回転モーメントにより作用する力が考えられる。各台車における前後の軸の小歯車が大歯車を押す力Fenの和のうち、大歯車の半径R、軸箱・ノーズ間距離a、台車の車軸間距離lに基づく所定比率の力が、各軸の(3)の力となる。
各台車において前後の軸の引張力により、台車枠重心回りの回転モーメントが働くため、この回転モーメントによる軸重移動が考えられる。各台車における前後の引張力Flnの和のうち、車輪径D、レール頭頂面から牽引装置までの高さ距離h、台車内の車軸間距離Lに基づく所定比率の力が、各軸の(4)の力(軸重移動量)となる。
全ての軸の引張力Flnの総和による車体重心回りの車両全体の回転モーメントが働くため、この回転モーメントによる軸重移動が考えられる。各軸の引張力Flnの和のうち、レール頭頂面から連結器までの高さ距離H、レール頭頂面から牽引装置までの高さ距離h、台車中心間距離Lに基づく所定比率の力が、各軸の(5)の力(軸重移動量)となる。
次に、動的軸重移動補償制御について説明する。ある軸で空転滑走が発生すると、1C1M制御であったとしても、空転滑走が発生していない他の軸(以下、健全軸(粘着軸)という)に空転滑走が誘発されることが知られている。そこで、本実施形態では、空転滑走が発生した場合に、他の健全軸の電動機トルクを制御して空転滑走の誘発を抑制する「動的軸重移動補償制御」を行う。空転滑走の誘発は、空転滑走の発生によって各軸の軸重移動量が変動することに起因すると推測される。
τeb=k×α ・・(22)
ここで、kは、動的軸重移動補償制御の対象軸と空転滑走軸との配置位置関係に応じて定められる係数(軸重移動係数)である。具体的には、力行時の空転滑走(空転時であるため空転)であるか制動時の空転滑走(制動時であるため滑走)であるか、制御対象軸と空転滑走軸との配置構成(同一台車内であるか、どちらが進行方向前方/後方か)によって、係数kの大きさ及び正負が定められている。
|Δτeb|≦Δτmax ・・(23)
この変更上限Δτmaxは、再粘着制御における電動機トルクτeの引き下げ量Δτeaをもとに定められ、具体的には引き下げ量Δτeaの10%程度である。
図5は、本実施形態における電気車の主回路構成を示すブロック図である。同図によれば、主回路は、車両の第1〜第4軸それぞれについて、電動機10と、速度センサ12と、インバータ20とを備えるとともに、各電動機10を個別制御(1C1M制御)する電動機制御装置1とを備えている。
次いで、決定した係数kと、加速度演算器500によって算出された空転滑走の検出時の空転滑走軸の加速度αとから、式(22)に従って、当該対象軸の電動機トルクτeの変更量Δτebを決定する。このとき、式(22)に従って算出される変更量Δτebが変更上限Δτmaxを超えるならば、変更量Δτebをこの変更上限Δτmaxに変更する。そして、対象軸それぞれに対する動的軸重移動補償指令τe_det *として、その指令値を、変更時間Tdをかけて変更量Δτebに相当する値まで増加或いは減少させ、その値を保持時間Tkの間保持した後、復帰時間Tkをかけてゼロまで減少或いは増加させる。
図9〜図14は、動輪2軸の台車を2台備える車両モデルのシミュレーション結果を示す図である。但し、各軸の電動機の制御は個別制御(1C1M制御)である。
なお、本発明の適用可能な実施形態は上述の実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能である。
上述の実施形態では、動的軸重移動補償制御において、電動機トルクτeの変更量Δτebを、空転滑走軸の空転滑走の発生時の加速度αに基づいて決定することにしたが(式(22)参照)、空転滑走の発生時の空転滑走軸の速度Vと基準速度Vmとの速度差(空転滑走速度)ΔVに基づいて決定することにしても良い。
また、上述の実施形態では、空転滑走軸以外の全ての軸を動的軸重移動補償制御の対象軸としたが、例えば空転滑走軸と同じ台車内の軸については対象としないといったように、健全軸の一部を対象軸としても良い。
更に、上述の実施形態では、動輪2軸の台車を2台備える電動車に本発明を適用した場合の実施形態を説明したが、3台以上の台車を備える機関車等にも適用することが可能なのは勿論である。
1 電動機制御装置
30 ベクトル制御演算器
100 引張力/軸重比発生器、200 トルク指令演算器
300 空転滑走検出器
400 再粘着制御器、410 再粘着制御テーブル
500 加速度演算器、600 軸重移動演算器
700 動的軸重移動補償制御器
710 係数テーブル、720 動的軸重移動補償制御テーブル
Claims (6)
- 動力車の各軸それぞれを駆動する電動機を個別にトルク制御する電気車制御方法であって、
各軸の引張力/軸重比の指令値、走行加速度、及び、軸重を含む前記動力車の車両固有定数を用いて、軸重移動を考慮した各軸の引張力/軸重比を前記指令値通りとさせるためのトルク指令を演算するトルク指令演算ステップと、
空転滑走した軸を検出する検出ステップと、
前記検出ステップによる検出がなされた場合に少なくとも空転滑走した軸の前記トルク指令を変更して前記トルク指令を更新する変更ステップと、
前記トルク指令に基づいて、対応する電動機を個別に駆動制御する駆動制御ステップと、
前記トルク指令演算ステップで演算されたトルク指令と前記駆動制御ステップで用いたトルク指令との差、各軸の加速度、及び、前記動力車の前記車両固有定数を用いて、当該トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出する変動量算出ステップと、
を含み、
前記トルク指令演算ステップでは、前記変動量算出ステップで算出された軸重移動の変動量で、対応する各軸の軸重を補正して各軸それぞれのトルク指令を演算する電気車制御方法。 - 前記トルク指令演算ステップは、以下1)〜5)の運動量を表す各軸それぞれ個別の数式モデルでなる軸重移動量数式モデルに基づく所定の軸重移動補償トルク演算を行って、各軸それぞれのトルク指令を算出するステップである請求項1に記載の電気車制御方法。
1)電動機トルクによって歯車の間に伝わる力の車軸伝達成分
2)電動機トルクによって歯車の間に伝わる力の反力のうちの電動機支持部への伝達成分
3)2)の力による台車枠重心回り回転モーメントにより作用する力
4)引張力による台車枠重心回り回転モーメントによる軸重移動量
5)全軸の引張力による車体重心回り回転モーメントによる軸重移動量 - 前記変動量算出ステップは、以下1)〜5)の運動量を表す各軸それぞれ個別の数式モデルでなる軸重移動量数式モデルに基づいて、前記トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出するステップである請求項1に記載の電気車制御方法。
1)電動機トルクによって歯車の間に伝わる力の車軸伝達成分
2)電動機トルクによって歯車の間に伝わる力の反力のうちの電動機支持部への伝達成分
3)2)の力による台車枠重心回り回転モーメントにより作用する力
4)引張力による台車枠重心回り回転モーメントによる軸重移動量
5)全軸の引張力による車体重心回り回転モーメントによる軸重移動量 - 前記変更ステップは、
空転滑走した軸のトルクを一時的に引き下げて再粘着させる制御を行う再粘着制御ステップと、
空転滑走した軸の空転滑走の程度を表す加速度、空転滑走速度又はこれらの相当値でなる空転滑走指標値を用いて空転滑走していない健全軸のトルク変更量を算出する算出ステップと、
前記健全軸のトルクを一時的に前記トルク変更量分変更して空転滑走の誘発を抑制する制御を行う誘発抑制制御ステップと、
を含む請求項1〜3の何れか一項に記載の電気車制御方法。 - 前記算出ステップは、前記空転滑走指標値と、動力車の各台車及び当該台車内の各軸の配置構成によって定まる空転滑走した軸と健全軸間の動的な軸重移動量を考慮した軸重移動係数とを用いて、健全軸の前記トルク変更量を算出するステップである請求項4に記載の電気車制御方法。
- 動力車の各軸それぞれを駆動する電動機を個別にトルク制御する電気車制御装置であって、
各軸の引張力/軸重比の指令値、走行加速度、及び、軸重を含む前記動力車の車両固有定数を用いて、軸重移動を考慮した各軸の引張力/軸重比を前記指令値通りとさせるためのトルク指令を演算するトルク指令演算部と、
空転滑走した軸を検出する検出部と、
前記検出部による検出がなされた場合に、少なくとも空転滑走した軸の前記トルク指令を変更して前記トルク指令を更新するトルク指令変更部と、
前記トルク指令に基づいて、対応する電動機を個別に駆動制御する駆動制御部と、
前記トルク指令演算部で演算されたトルク指令と前記駆動制御部で用いたトルク指令との差、各軸の加速度、及び、前記動力車の前記車両固有定数を用いて、当該トルク指令の差の分のトルク指令を与えた場合に生じる各軸それぞれの軸重移動の変動量を算出する変動量算出部と、
を備え、
前記トルク指令演算部は、前記変動量算出部で算出された軸重移動の変動量で、対応する各軸の軸重を補正して各軸それぞれのトルク指令を演算する電気車制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188049A JP2010028982A (ja) | 2008-07-22 | 2008-07-22 | 電気車制御方法及び電気車制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188049A JP2010028982A (ja) | 2008-07-22 | 2008-07-22 | 電気車制御方法及び電気車制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010028982A true JP2010028982A (ja) | 2010-02-04 |
| JP2010028982A5 JP2010028982A5 (ja) | 2011-10-20 |
Family
ID=41734251
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008188049A Pending JP2010028982A (ja) | 2008-07-22 | 2008-07-22 | 電気車制御方法及び電気車制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010028982A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011234510A (ja) * | 2010-04-27 | 2011-11-17 | Toshiba Corp | 車両制御装置 |
| JP2012034456A (ja) * | 2010-07-29 | 2012-02-16 | Railway Technical Research Institute | 電動機制御方法及び電動機制御装置 |
| JP2012105452A (ja) * | 2010-11-10 | 2012-05-31 | Toshiba Corp | 電気車両制御装置 |
| CN105539202A (zh) * | 2015-12-28 | 2016-05-04 | 航天重型工程装备有限公司 | 一种多轴矿用车转矩分配方法及装置 |
| CN112061177A (zh) * | 2020-09-18 | 2020-12-11 | 成都运达科技股份有限公司 | 基于最优牵引转矩在线搜寻的机车黏着控制方法 |
| WO2024029310A1 (ja) * | 2022-08-05 | 2024-02-08 | 株式会社日立製作所 | 車両制御装置、車両制御方法および車両制御システム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261415A (ja) * | 1993-03-05 | 1994-09-16 | Toshiba Corp | 車両用モータの制御方法およびその装置 |
| JP2000134723A (ja) * | 1998-10-27 | 2000-05-12 | Hitachi Ltd | 軸重補償形トルク適正配分運転方式 |
| JP2001231105A (ja) * | 2000-02-15 | 2001-08-24 | Kiyoshi Oishi | 電気車制御装置 |
| JP2005039915A (ja) * | 2003-07-18 | 2005-02-10 | Mitsubishi Electric Corp | 電気車の制御装置 |
| JP2005295659A (ja) * | 2004-03-31 | 2005-10-20 | Railway Technical Res Inst | 電気車の制御装置及び電気車の制御方法 |
| JP2008182827A (ja) * | 2007-01-25 | 2008-08-07 | Railway Technical Res Inst | 電気車制御装置及び電気車制御方法 |
| JP2009290954A (ja) * | 2008-05-28 | 2009-12-10 | Railway Technical Res Inst | 電気車制御方法及び電気車制御装置 |
-
2008
- 2008-07-22 JP JP2008188049A patent/JP2010028982A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261415A (ja) * | 1993-03-05 | 1994-09-16 | Toshiba Corp | 車両用モータの制御方法およびその装置 |
| JP2000134723A (ja) * | 1998-10-27 | 2000-05-12 | Hitachi Ltd | 軸重補償形トルク適正配分運転方式 |
| JP2001231105A (ja) * | 2000-02-15 | 2001-08-24 | Kiyoshi Oishi | 電気車制御装置 |
| JP2005039915A (ja) * | 2003-07-18 | 2005-02-10 | Mitsubishi Electric Corp | 電気車の制御装置 |
| JP2005295659A (ja) * | 2004-03-31 | 2005-10-20 | Railway Technical Res Inst | 電気車の制御装置及び電気車の制御方法 |
| JP2008182827A (ja) * | 2007-01-25 | 2008-08-07 | Railway Technical Res Inst | 電気車制御装置及び電気車制御方法 |
| JP2009290954A (ja) * | 2008-05-28 | 2009-12-10 | Railway Technical Res Inst | 電気車制御方法及び電気車制御装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011234510A (ja) * | 2010-04-27 | 2011-11-17 | Toshiba Corp | 車両制御装置 |
| JP2012034456A (ja) * | 2010-07-29 | 2012-02-16 | Railway Technical Research Institute | 電動機制御方法及び電動機制御装置 |
| JP2012105452A (ja) * | 2010-11-10 | 2012-05-31 | Toshiba Corp | 電気車両制御装置 |
| CN105539202A (zh) * | 2015-12-28 | 2016-05-04 | 航天重型工程装备有限公司 | 一种多轴矿用车转矩分配方法及装置 |
| CN112061177A (zh) * | 2020-09-18 | 2020-12-11 | 成都运达科技股份有限公司 | 基于最优牵引转矩在线搜寻的机车黏着控制方法 |
| WO2024029310A1 (ja) * | 2022-08-05 | 2024-02-08 | 株式会社日立製作所 | 車両制御装置、車両制御方法および車両制御システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6233420B2 (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP4850870B2 (ja) | 電気車制御方法及び電気車制御装置 | |
| JP6440971B2 (ja) | 左右独立駆動車のトラクション制御機能付き駆動制御装置 | |
| CN107921885B (zh) | 滑移控制装置 | |
| JP2010028982A (ja) | 電気車制御方法及び電気車制御装置 | |
| JP2007209068A (ja) | 電動車両の駆動力制御装置、自動車及び電動車両の駆動力制御方法 | |
| WO2012011437A1 (ja) | 電動車両のトルク異常判定装置 | |
| JP5527081B2 (ja) | 電動車両の駆動力推定装置 | |
| JP2013132166A (ja) | 電動車両の制御装置 | |
| JP6079356B2 (ja) | 各輪独立駆動台車の制御装置 | |
| JP4727597B2 (ja) | 電気車制御装置及び電気車制御方法 | |
| JP4729871B2 (ja) | 車両の旋回制御装置 | |
| JP2007030567A (ja) | 制御装置及び車両 | |
| JP4903740B2 (ja) | 電動機制御方法及び電動機制御装置 | |
| WO2023013565A1 (ja) | 車両制御装置 | |
| JP2014192927A (ja) | 各輪独立駆動台車の制御装置 | |
| JP6064727B2 (ja) | 各輪独立駆動台車の制御装置 | |
| JP4945493B2 (ja) | 電動機制御方法及び電動機制御装置 | |
| JP2005020830A (ja) | 車両のヨーイング挙動制御装置 | |
| JP2008049996A (ja) | 車両の運動制御装置 | |
| JP4083697B2 (ja) | 電気車の制御装置及び電気車の制御方法 | |
| JP2011234510A (ja) | 車両制御装置 | |
| JP2004052625A (ja) | ハイブリッド車両 | |
| JP5703618B2 (ja) | 電動車両のトルク異常判定装置 | |
| JP6678511B2 (ja) | 空転・滑走安定化装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110720 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20110817 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121106 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131112 |