JP2010025830A - 回転角度検出方法及び装置 - Google Patents
回転角度検出方法及び装置 Download PDFInfo
- Publication number
- JP2010025830A JP2010025830A JP2008189285A JP2008189285A JP2010025830A JP 2010025830 A JP2010025830 A JP 2010025830A JP 2008189285 A JP2008189285 A JP 2008189285A JP 2008189285 A JP2008189285 A JP 2008189285A JP 2010025830 A JP2010025830 A JP 2010025830A
- Authority
- JP
- Japan
- Prior art keywords
- phase signal
- rotation angle
- phase
- signal
- rotating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】回転体7を回転させてセンサ11により互いに位相が90°ずれた正弦波状のA相信号とB相信号を取得する。角度演算器13aにより、A相信号及びB相信号をそれぞれの信号の平均値が0となるように補正し、A相信号及びB相信号を振幅が互いに等しくなるように補正し、補正されたA相信号及びB相信号に基づいて回転体7の回転角度を演算する。
【選択図】図1
Description
θ=tan−1(sinθ/cosθ)・・・(1)
(1)本発明は、回転体を回転させて互いに位相が90°ずれた正弦波状のA相信号とB相信号を取得し、A相信号及びB相信号をそれぞれの信号の平均値が0となるように補正し、A相信号及びB相信号を振幅が互いに等しくなるように補正し、補正されたA相信号及びB相信号に基づいて回転体の回転角度を演算する、ことを特徴とする。
マウント4は、回転体7を備えた回転機械6を装着し、しっかりと固定できるように構成されている。アンバランス計測の対象となる回転機械6は、例えば、過給機、圧縮機、タービン、モータなどである。
xiの標準偏差sは、下記の[数1]によって求めることができる。

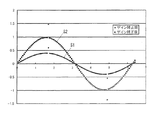
角度演算器13aは、補正されたA相信号及びB相信号に基づいて回転体7の回転角度を演算する。A相信号とB相信号は、位相が90°ずれており、sin信号とcos信号として扱うことができる。A相信号とB相信号からsinθ、cosθ(θ:回転角度)のデータを取得し、下記の(8)式により回転角度を算出する。
θ=tan−1(sinθ/cosθ)・・・(8)
なお、ゲイン補正において、A相信号及びB相信号の振幅が等しくなれば、補正後の振幅は必ずしも1でなくてもよい。
2 ベース
3 バネ部材
4 マウント
6 回転機械
7 回転体
8 軸
10 回転角度検出装置
11 センサ
11A 磁気センサ
11a、11b 磁気抵抗素子
12 振動センサ
13 演算装置
13a 角度演算器
13b アンバランス量演算器
Claims (4)
- 回転体を回転させて互いに位相が90°ずれた正弦波状のA相信号とB相信号を取得し、
A相信号及びB相信号をそれぞれの信号の平均値が0となるように補正し、
A相信号及びB相信号を振幅が互いに等しくなるように補正し、
補正されたA相信号及びB相信号に基づいて回転体の回転角度を演算する、ことを特徴とする回転角度検出方法。 - A相信号及びB相信号の振幅が等しくなるように補正する際に、
A相信号を、A相信号の標準偏差に2の平方根を乗算して得た値で除算し、
B相信号を、B相信号の標準偏差に2の平方根を乗算して得た値で除算する、請求項1記載の回転角度検出方法。 - 回転体の回転角度を検出する回転角度検出装置であって、
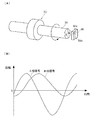
前記回転体が回転することで互いに位相が90°ずれた正弦波状のA相信号とB相信号を生成するセンサと、
該センサからの信号を補正して回転体の角度を演算する角度演算器とを備え、
該角度演算器は、A相信号及びB相信号をそれぞれの信号の平均値が0となるように補正するとともに、A相信号及びB相信号を振幅が互いに等しくなるように補正し、補正されたA相信号及びB相信号に基づいて回転体の回転角度を演算する、ことを特徴とする回転角度検出装置。 - 前記角度演算器は、A相信号及びB相信号の振幅が等しくなるように補正する際に、A相信号を、A相信号の標準偏差に2の平方根を乗算して得た値で除算し、B相信号を、B相信号の標準偏差に2の平方根を乗算して得た値で除算する、請求項3記載の回転角度検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008189285A JP5170837B2 (ja) | 2008-07-23 | 2008-07-23 | 回転角度検出方法及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008189285A JP5170837B2 (ja) | 2008-07-23 | 2008-07-23 | 回転角度検出方法及び装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010025830A true JP2010025830A (ja) | 2010-02-04 |
| JP5170837B2 JP5170837B2 (ja) | 2013-03-27 |
Family
ID=41731796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008189285A Active JP5170837B2 (ja) | 2008-07-23 | 2008-07-23 | 回転角度検出方法及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5170837B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019187733A1 (ja) * | 2018-03-26 | 2019-10-03 | 日立オートモティブシステムズ株式会社 | 角度検出装置および角度検出方法 |
| JP2021006769A (ja) * | 2019-06-28 | 2021-01-21 | 三菱電機株式会社 | 回転角度検出装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000230840A (ja) * | 1999-02-09 | 2000-08-22 | Olympus Optical Co Ltd | エンコーダ内挿装置 |
| WO2007148461A1 (ja) * | 2006-06-19 | 2007-12-27 | Panasonic Corporation | エンコーダ信号の位相補正回路 |
-
2008
- 2008-07-23 JP JP2008189285A patent/JP5170837B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000230840A (ja) * | 1999-02-09 | 2000-08-22 | Olympus Optical Co Ltd | エンコーダ内挿装置 |
| WO2007148461A1 (ja) * | 2006-06-19 | 2007-12-27 | Panasonic Corporation | エンコーダ信号の位相補正回路 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019187733A1 (ja) * | 2018-03-26 | 2019-10-03 | 日立オートモティブシステムズ株式会社 | 角度検出装置および角度検出方法 |
| JPWO2019187733A1 (ja) * | 2018-03-26 | 2020-12-03 | 日立オートモティブシステムズ株式会社 | 角度検出装置および角度検出方法 |
| US11480498B2 (en) | 2018-03-26 | 2022-10-25 | Hitachi Astemo, Ltd. | Angle detection device and angle detection method |
| JP2021006769A (ja) * | 2019-06-28 | 2021-01-21 | 三菱電機株式会社 | 回転角度検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5170837B2 (ja) | 2013-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5052603B2 (ja) | 絶対回転位置検出方法 | |
| JP5288320B2 (ja) | 高速回転体の回転バランス計測装置及び方法 | |
| KR102195533B1 (ko) | 로터리 인코더 및 로터리 인코더의 각도 보정 방법 | |
| KR102481561B1 (ko) | 인코더 및 회전 각도 위치 산출 방법 | |
| KR102502508B1 (ko) | 보정 테이블 작성 장치, 인코더 및 보정 테이블 작성 방법 | |
| JP5418805B2 (ja) | 回転体のアンバランス量算出方法及び装置 | |
| JP4858837B2 (ja) | 回転角度検出装置 | |
| KR101273978B1 (ko) | 절대 회전 위치 검출 방법 | |
| US20100321008A1 (en) | Rotation-angle-detecting apparatus, rotating machine and rotation-angle-detecting method | |
| CN110546463B (zh) | 用于确定旋转构件的角位置的方法 | |
| JP5170837B2 (ja) | 回転角度検出方法及び装置 | |
| JP2018132357A (ja) | ロータリエンコーダ | |
| EP2510313A1 (en) | Method for estimating the angular position, measuring device and sensor bearing | |
| JP5162739B2 (ja) | エンコーダ信号処理方法、エンコーダ装置及びサーボモータ | |
| JP2006042537A (ja) | 磁気エンコーダと信号処理回路を付加したブラシレスdcモータ | |
| JP2014098642A (ja) | 角度補正装置及び回転角センサ | |
| JP2020153980A (ja) | 回転部材の少なくとも1つの回転パラメータを決定するシステム | |
| JP5831689B2 (ja) | 回転角検出装置と方法 | |
| JP5300831B2 (ja) | 機械角度測定装置 | |
| JP5499412B2 (ja) | 回転装置における振動振幅および位相検出方法、回転装置における振動振幅および位相検出装置 | |
| JP2006197684A (ja) | ブラシレスモータ | |
| JP2018132359A (ja) | ロータリエンコーダ | |
| JP5476717B2 (ja) | 回転バランス修正装置及び方法 | |
| JP5257762B2 (ja) | 高速回転体の回転バランス計測装置及び方法 | |
| KR20080068435A (ko) | 마그네틱 플럭스를 이용한 스큐자석의 스큐각도 측정방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110526 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120803 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121223 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5170837 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160111 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |